控制与设计习题复习(39张幻灯片)
图片预览


文档简介
(共39张PPT)
控制与设计
----考前复习
考点解读
一、控制的含义(Ⅰ)
二、控制的应用(Ⅰ)
三、控制的手段 (Ⅰ)
四、开环控制系统的基本组成和工作过程(Ⅱ)
五、闭环控制系统的基本组成和工作过程(Ⅱ)
六、控制系统的方框图(Ⅱ)
七、控制系统的干扰因素(Ⅰ)
八、功能模拟方法和黑箱方法(Ⅰ)
九、控制系统设计方案(Ⅱ)
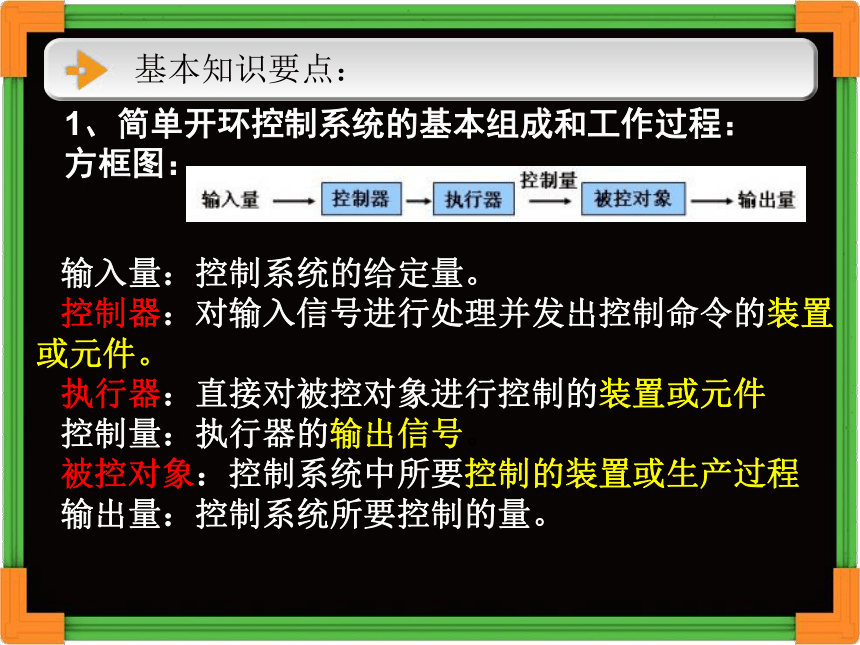
基本知识要点:
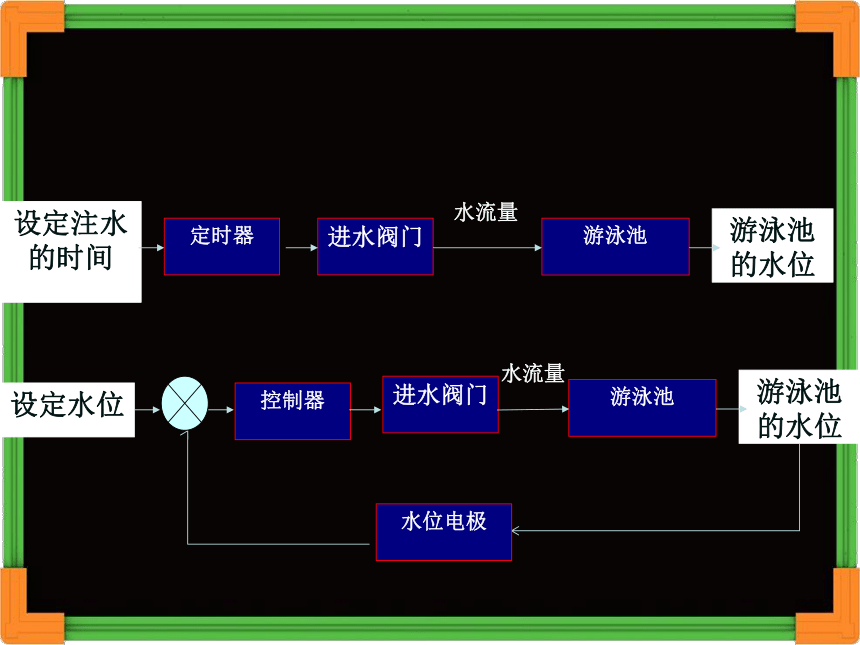
1、简单开环控制系统的基本组成和工作过程:
方框图:
输入量:控制系统的给定量。
控制器:对输入信号进行处理并发出控制命令的装置或元件。
执行器:直接对被控对象进行控制的装置或元件
控制量:执行器的输出信号。
被控对象:控制系统中所要控制的装置或生产过程
输出量:控制系统所要控制的量。
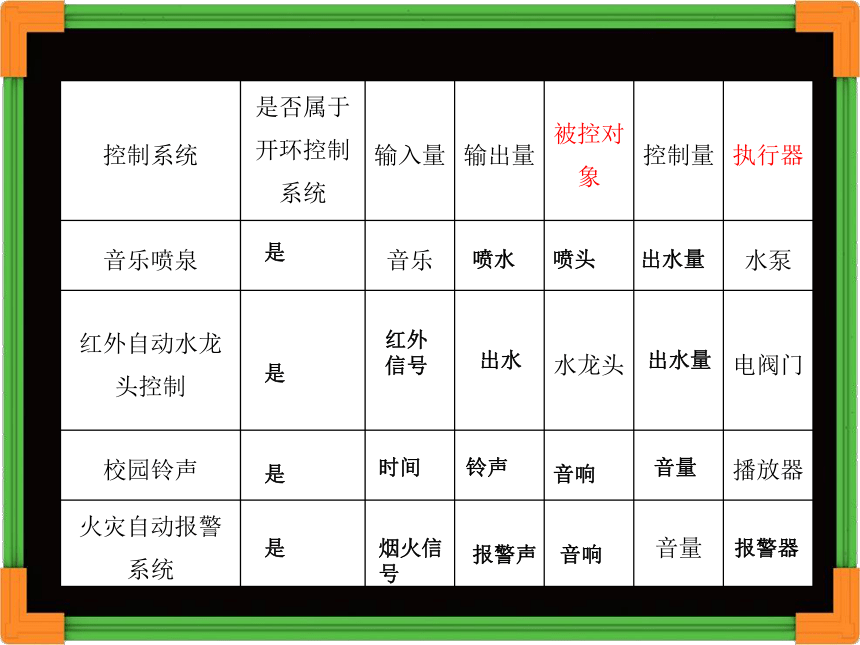
控制系统 是否属于开环控制系统 输入量 输出量 被控对象 控制量 执行器
音乐喷泉 音乐 水泵
红外自动水龙头控制 水龙头 电阀门
校园铃声 播放器
火灾自动报警系统 音量
是
是
是
是
喷水
喷头
出水量
出水量
音量
红外信号
出水
时间
铃声
音响
烟火信号
报警声
音响
报警器
进水阀门
定时器
设定注水的时间
游泳池
游泳池的水位
水流量
进水阀门
控制器
设定水位
游泳池
游泳池的水位
水流量
水位电极
2、闭环控制系统的方框图:
控制器和执行器的作用:
控制器:对输入信号(偏差值)进行运算处理,并发出 控制命令。
执行器:根据指令对被控对象直接控制。
控制系统的输出量返回到输入端对控制过程产生影响。
3、(2008.10月浙江省高考19题)如图所示为自动火炮控制系统示意图。当雷达检测到飞机后发出信号给跟踪系统,跟踪系统操纵火炮,调整火炮角度。该系统中被控对象是
A.火炮;B.跟踪系统;C.雷达;D.飞机
A
被控对象:控制系统中所要控制的装置或生产过程
例题精析:控制系统的基本组成
2009年9月 19、高速公路汽车速度监测系统的测速雷达测量车速,经控制器判断后,控制摄像头将超速车辆的图像信息记录下来,作为违章处罚的证据,该速度监测系统中的被控对象是 A、汽车 B、测速雷达 C、摄像头 D、速度显示器
C
举一反三:控制系统的基本组成
被控对象:控制系统中所要控制的装置或生产过程
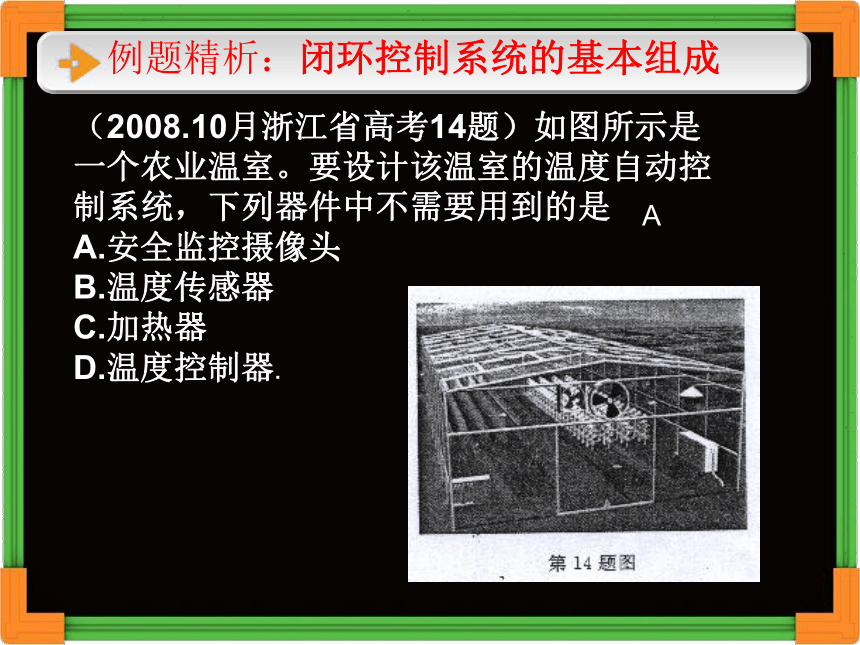
(2008.10月浙江省高考14题)如图所示是一个农业温室。要设计该温室的温度自动控制系统,下列器件中不需要用到的是
A.安全监控摄像头
B.温度传感器
C.加热器
D.温度控制器.
A
例题精析:闭环控制系统的基本组成
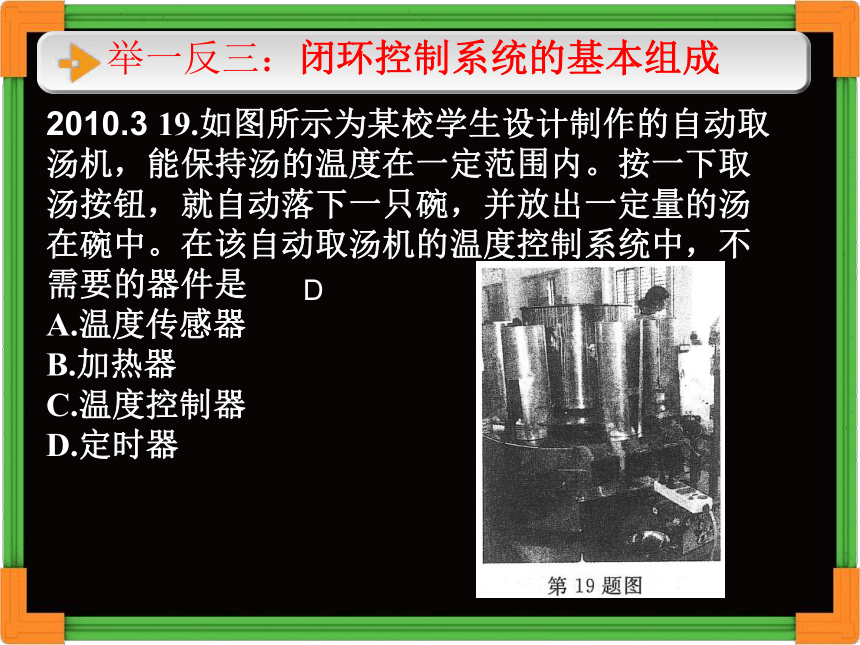
2010.3 19.如图所示为某校学生设计制作的自动取汤机,能保持汤的温度在一定范围内。按一下取汤按钮,就自动落下一只碗,并放出一定量的汤在碗中。在该自动取汤机的温度控制系统中,不需要的器件是 A.温度传感器 B.加热器 C.温度控制器 D.定时器
D
举一反三:闭环控制系统的基本组成
5、(2009.3月浙江省高考15题)声控灯控制系统中,传感器接收声音信号,经控制电路处理后驱动开关接通或关闭灯泡。该系统的控制对象是灯泡,控制量是 A、灯泡的发光
B、声音的大小
C、电源电压的高和低
D、开关的通与断
D
控制量:执行器的输出信号
例题精析:控制系统的基本组成
2010.9 19、如图所示是上海世博会“智能化垃圾气力输送系统”中的垃圾桶,桶内装有容量传感器,当垃圾达到桶容积的80%时,该信息传输到垃圾处理控制中心,中心启动千米外的抽风机开始抽气,将垃圾吸住“垃圾收集站”。关于这个控制系统,下列说明正确的是
A、执行器是容量传感器
B、控制器是抽风机
C、被控对象是桶内垃圾
D、设定值是实际吸出的垃圾量
举一反三:控制系统的基本组成
C
被控对象:控制系统中所要控制的装置或生产过程
执行器:直接对被控对象进行控制的装置或元件
控制器:对输入信号进行处理并发出控制命令的装置或元件
被控量(输出量):就是控制系统要控制的量。
(3)开闭环控制系统的判断依据:
A、如果控制系统是被控量是一个“可持续变化的量”,同时系统控制的最经终目的是将该量控制到某个设定的值则是闭环;反之,如果控制系统控制的是几种“状态”,那么可以判断是一个开环控制系统。
B、闭环控制系统必定存在检测装置,这个检测装置检测的是被控量的变化。
2、(2009.3月浙江省高考20题)小明发现学校路灯有时由于没有及时关闭而浪费用电,为此他设计了一个控制方案,能够在天亮时关闭,天暗后打开。该控制系统应该属于 A、自动控制的闭环控制系统;
B、自动控制的开环控制系统;
C、手动控制的闭环控制系统;
D、手动控制的开环控制系统
B
例题精析:控制系统的手段与方式
2010.3 18.如图所示为一款双缸洗衣机。洗衣时,将定时器旋钮旋转到设定时间位置,洗衣机在定时器控制下开始工作,直到定时器回到零位,洗衣机才停止工作。该过程的控制属于 A.手动控制、开环控制 B.自动控制、开环控制 C.自动控制、闭环控制 D.手动控制、闭环控制
B
举一反三:控制系统的手段与方式
2010.9 18、有一款婴幼儿耳测温度计,它有一个声光警报装置,当测得温度高于37。5度时,就会发出嘟嘟声闪烁。这个温度报警系统的控制方式属于
A、手动控制、开环控制
B、自动控制、开环控制
C、自动控制、闭环控制
D、手动控制、闭环控制
举一反三:控制系统的手段与方式
B
20、如图所示的减速器是常用的机械部件。工程师为了判断其内部故障,通常转动输入轴,根据发出的声音来判断故障。该诊断方法属于
A、黑箱方法
B、功能模拟法 C、干扰法 D、虚拟试验法
2009年9月
A
例题精析:黑箱方法 ,功能模拟方法
黑箱方法就是通过观测黑箱外部输入信息(外部对黑箱的影响)和输出信息(黑箱对外界的反应),研究和认识其功能、特性、结构、机理。如中医的望闻问切
以功能和行为的相似性为基础,用“模型”模拟“原型”的功能和行为的方法,就是功能模拟法。
20.如图所示为中科院研发的一款智能机器人,能模仿人唱歌、跳舞等。这种用机器人模仿人的功能和行为的方法属于 A.黑箱方法 B.移植方法 C.虚拟方法 D.功能模拟方法
2010.3
D
举一反三:黑箱方法 ,功能模拟方法
20、下列医疗诊断方法中不属于黑箱方法的是
2010.9
B
举一反三:黑箱方法 ,功能模拟方法
25.如图所示为现代农业喷灌控制系统示意图,土壤湿度传感器将检测到的土壤湿度转换成电信号传输给喷灌控制器,与土壤湿度设定值进行比较,当检测到的土壤湿度低于设定值的下限时,喷灌控制器发出信号打开电磁阀,喷头向农作物喷水。当检测到的土壤湿度高于设定值的上限时,喷灌控制器发出信号关闭电磁阀,喷头停止喷水,从而达到自动控制土壤湿度的目的。
2010.9
25.如图所示为现代农业喷灌控制系统示意图,土壤湿度传感器将检测到的土壤湿度转换成电信号传输给喷灌控制器,与土壤湿度设定值进行比较,当检测到的土壤湿度低于设定值的下限时,喷灌控制器发出信号打开电磁阀,喷头向农作物喷水。当检测到的土壤湿度高于设定值的上限时,喷灌控制器发出信号关闭电磁阀,喷头停止喷水,从而达到自动控制土壤湿度的目的。
2010.9
(2)如果要改变土壤湿度的控制范围,需要调整的是__▲__。 (从土壤湿度传感器;土壤湿度设定值;电磁阀中选择一个)
(1)根据示意图及其描述,在控制系统方框图中“__▲__”处填写相应的内容。
土壤湿度传感器
喷灌控制器
电磁阀,喷头
土壤实际湿度
土壤
土壤湿度设定值
25.如图所示为简化的飞机飞行状态控制系统。
陀螺仪检测飞机的飞行状态后将信号送给自动
驾驶仪,自动驾驶仪将飞行状态与给定状态进
行比较,根据偏差值控制舵机运转舵机操纵飞
机尾翼,调整飞行状态。
例题精析:控制系统的方框图
(1)请根据上面的示意图,补充完整飞机飞行状态控制系统方框图。(在“▲”处填写相应的内容)
陀螺仪
控制器
舵机
被控量
(2)陀螺仪将检测到的飞行状态信号传送到自动驾驶仪与给定状态进行比较的过程称为 ▲
(3)在飞机飞行过程中,遇到气流时,飞行状态会发生变化,这种给定状态以外引起飞行状态变化的因素称为 ▲ 。
反馈
干扰因素
例题精析:反馈、干扰因素
在控制系统中,将输出量通过适当的检测装置返回到输入端并与输入量进行比较的过程,就是反馈。
在控制系统中,除输入量(给定值)以外,引起被控量变化的各种因素称为干扰因素。
25、传统列车的动力装置集中安装在机车上,在机车后面挂着许多没有动力装置的客车车厢。我国新开发的动车组把动力装置分散安装在客车车厢上,使其既具有牵引动力,又可以载客,提高了列车的运行速度。如图所示为经过简化的动车牵引传动控制系统示意图。驾驶员向自动驾驶装置发出驾驶指令(设定速度),自动驾驶装置发出信号控制牵引传动装置运转,牵引传动装置驱动车轮转动,从而使动车运行,速度传感器检测动车的实际运行速度,并将测得的速度信号发送给自动驾驶装置与设定的速度进行比较,根据比较偏差值调整动车运行速度。
(2009年3月高考题)
25、传统列车的动力装置集中安装在机车上,在机车后面挂着许多没有动力装置的客车车厢。我国新开发的动车组把动力装置分散安装在客车车厢上,使其既具有牵引动力,又可以载客,提高了列车的运行速度。如图所示为经过简化的动车牵引传动控制系统示意图。驾驶员向自动驾驶装置发出驾驶指令(设定速度),自动驾驶装置发出信号控制牵引传动装置运转,牵引传动装置驱动车轮转动,从而使动车运行,速度传感器检测动车的实际运行速度,并将测得的速度信号发送给自动驾驶装置与设定的速度进行比较,根据比较偏差值调整动车运行速度。
(2009年3月高考题)
动车实际速度
×
自动驾驶装置
牵引传动装置
动车
速度传感器
设定速度
(2)速度传感器将检测到的动车行驶速度信号传送给自动驾驶装置与驾驶指令进行比较的过程称为 ⑥▲
25.如图所示为磁悬浮地球仪及控制系统原理图,控制器发出的交流电信号,通过电感线圈产生交变磁场,使地球仪产生感生电流,由于线圈产生的磁场和地球感生电流的磁场是相斥的,从而产生电磁悬浮力,将地球仪悬浮起来。位置传感器检测地球仪位置,并将检测到的信号发送给控制器与设定信号进行比较,控制器根据比较偏差值调整交流电信号。
(2009年9月高考题)
25.如图所示为磁悬浮地球仪及控制系统原理图,控制器发出的交流电信号,通过电感线圈产生交变磁场,使地球仪产生感生电流,由于线圈产生的磁场和地球感生电流的磁场是相斥的,从而产生电磁悬浮力,将地球仪悬浮起来。位置传感器检测地球仪位置,并将检测到的信号发送给控制器与设定信号进行比较,控制器根据比较偏差值调整交流电信号。
(2009年9月高考题)
地球仪位置
×
控制器
电磁线圈
地球仪
位置传感器
设定信号
25.如图所示为高层楼房自动稳压供水控制系统原理图,其工作原理是:当用户用水量变化时,管道中的水压发生变化,检测装置把检测到的水压信号反馈给控制器,与设定水压进行比较,控制器根据偏差值控制电机及水泵的转速,调节供水量,保持管道中的水压稳定。
(2010年3月高考题)
25.如图所示为高层楼房自动稳压供水控制系统原理图,其工作原理是:当用户用水量变化时,管道中的水压发生变化,检测装置把检测到的水压信号反馈给控制器,与设定水压进行比较,控制器根据偏差值控制电机及水泵的转速,调节供水量,保持管道中的水压稳定。
(2010年3月高考题)
(1)根据示意图及其描述,在控制系统方框图中“ ▲ ”处填写与自动稳压供水控制系统 原理图中相对应的内容。
(2)请为该系统的检测装置选择一个合适的传感器(从水温传感器、水压传感器、水位传感器中选择一个,填在“ ▲ ”处).
(1)根据示意图及其描述,在控制系统方框图中“ ▲ ”处填写与自动稳压供水控制系统 原理图中相对应的内容。
(2)请为该系统的检测装置选择一个合适的传感器(从水温传感器、水压传感器、水位传感器中选择一个,填在“ ▲ ”处).
实际
水压
×
控制器
电机及水泵
管道中的水
水压传感器
设定水压
27、下图是瓦特发明的离心式速度调节器转速自动控制原理图。如图所示,弹簧与调节阀连在一起,当由于某种外界原因(如发动机的负载减小)导致调节臂的转速加快、离心力增大时,则弹簧缩短,调节阀向下移动,阀门通孔截面积减少,输油管内的进油量降低,发动机转速下降。反之,发动机转速下降,带动调节臂的转速下降,则调节阀向上移动,进油量增加。
如图所示是天文望远镜自动跟踪系统。它由可转动望远镜、位置误差传感器、控制电路和电机组成。其跟踪控制过程是:位置误差传感器检测出望远镜的方向,与太阳方向进行比较,将差值信号传递给控制电路,控制电路发出指令并驱动电机运转,从而调节望远镜的指向,使其始终精确指向太阳。
某核电站运行时,高压循环水经过反应堆被加热到300一400度,这些高压循环水再把蒸汽发生器中的水加热成蒸汽用于发电。为了保证系统的正常运行,需要控制循环水的温度,其控制过程是(原理如图所示):热电偶测出循环水的温度,该温度被传送到控制机构与设定的温度进行比较,然后根据偏差值,通过驱动机构调节控制棒,控制反应堆的反应速度,使水温达到预设的值。
控制与设计
----考前复习
考点解读
一、控制的含义(Ⅰ)
二、控制的应用(Ⅰ)
三、控制的手段 (Ⅰ)
四、开环控制系统的基本组成和工作过程(Ⅱ)
五、闭环控制系统的基本组成和工作过程(Ⅱ)
六、控制系统的方框图(Ⅱ)
七、控制系统的干扰因素(Ⅰ)
八、功能模拟方法和黑箱方法(Ⅰ)
九、控制系统设计方案(Ⅱ)
基本知识要点:
1、简单开环控制系统的基本组成和工作过程:
方框图:
输入量:控制系统的给定量。
控制器:对输入信号进行处理并发出控制命令的装置或元件。
执行器:直接对被控对象进行控制的装置或元件
控制量:执行器的输出信号。
被控对象:控制系统中所要控制的装置或生产过程
输出量:控制系统所要控制的量。
控制系统 是否属于开环控制系统 输入量 输出量 被控对象 控制量 执行器
音乐喷泉 音乐 水泵
红外自动水龙头控制 水龙头 电阀门
校园铃声 播放器
火灾自动报警系统 音量
是
是
是
是
喷水
喷头
出水量
出水量
音量
红外信号
出水
时间
铃声
音响
烟火信号
报警声
音响
报警器
进水阀门
定时器
设定注水的时间
游泳池
游泳池的水位
水流量
进水阀门
控制器
设定水位
游泳池
游泳池的水位
水流量
水位电极
2、闭环控制系统的方框图:
控制器和执行器的作用:
控制器:对输入信号(偏差值)进行运算处理,并发出 控制命令。
执行器:根据指令对被控对象直接控制。
控制系统的输出量返回到输入端对控制过程产生影响。
3、(2008.10月浙江省高考19题)如图所示为自动火炮控制系统示意图。当雷达检测到飞机后发出信号给跟踪系统,跟踪系统操纵火炮,调整火炮角度。该系统中被控对象是
A.火炮;B.跟踪系统;C.雷达;D.飞机
A
被控对象:控制系统中所要控制的装置或生产过程
例题精析:控制系统的基本组成
2009年9月 19、高速公路汽车速度监测系统的测速雷达测量车速,经控制器判断后,控制摄像头将超速车辆的图像信息记录下来,作为违章处罚的证据,该速度监测系统中的被控对象是 A、汽车 B、测速雷达 C、摄像头 D、速度显示器
C
举一反三:控制系统的基本组成
被控对象:控制系统中所要控制的装置或生产过程
(2008.10月浙江省高考14题)如图所示是一个农业温室。要设计该温室的温度自动控制系统,下列器件中不需要用到的是
A.安全监控摄像头
B.温度传感器
C.加热器
D.温度控制器.
A
例题精析:闭环控制系统的基本组成
2010.3 19.如图所示为某校学生设计制作的自动取汤机,能保持汤的温度在一定范围内。按一下取汤按钮,就自动落下一只碗,并放出一定量的汤在碗中。在该自动取汤机的温度控制系统中,不需要的器件是 A.温度传感器 B.加热器 C.温度控制器 D.定时器
D
举一反三:闭环控制系统的基本组成
5、(2009.3月浙江省高考15题)声控灯控制系统中,传感器接收声音信号,经控制电路处理后驱动开关接通或关闭灯泡。该系统的控制对象是灯泡,控制量是 A、灯泡的发光
B、声音的大小
C、电源电压的高和低
D、开关的通与断
D
控制量:执行器的输出信号
例题精析:控制系统的基本组成
2010.9 19、如图所示是上海世博会“智能化垃圾气力输送系统”中的垃圾桶,桶内装有容量传感器,当垃圾达到桶容积的80%时,该信息传输到垃圾处理控制中心,中心启动千米外的抽风机开始抽气,将垃圾吸住“垃圾收集站”。关于这个控制系统,下列说明正确的是
A、执行器是容量传感器
B、控制器是抽风机
C、被控对象是桶内垃圾
D、设定值是实际吸出的垃圾量
举一反三:控制系统的基本组成
C
被控对象:控制系统中所要控制的装置或生产过程
执行器:直接对被控对象进行控制的装置或元件
控制器:对输入信号进行处理并发出控制命令的装置或元件
被控量(输出量):就是控制系统要控制的量。
(3)开闭环控制系统的判断依据:
A、如果控制系统是被控量是一个“可持续变化的量”,同时系统控制的最经终目的是将该量控制到某个设定的值则是闭环;反之,如果控制系统控制的是几种“状态”,那么可以判断是一个开环控制系统。
B、闭环控制系统必定存在检测装置,这个检测装置检测的是被控量的变化。
2、(2009.3月浙江省高考20题)小明发现学校路灯有时由于没有及时关闭而浪费用电,为此他设计了一个控制方案,能够在天亮时关闭,天暗后打开。该控制系统应该属于 A、自动控制的闭环控制系统;
B、自动控制的开环控制系统;
C、手动控制的闭环控制系统;
D、手动控制的开环控制系统
B
例题精析:控制系统的手段与方式
2010.3 18.如图所示为一款双缸洗衣机。洗衣时,将定时器旋钮旋转到设定时间位置,洗衣机在定时器控制下开始工作,直到定时器回到零位,洗衣机才停止工作。该过程的控制属于 A.手动控制、开环控制 B.自动控制、开环控制 C.自动控制、闭环控制 D.手动控制、闭环控制
B
举一反三:控制系统的手段与方式
2010.9 18、有一款婴幼儿耳测温度计,它有一个声光警报装置,当测得温度高于37。5度时,就会发出嘟嘟声闪烁。这个温度报警系统的控制方式属于
A、手动控制、开环控制
B、自动控制、开环控制
C、自动控制、闭环控制
D、手动控制、闭环控制
举一反三:控制系统的手段与方式
B
20、如图所示的减速器是常用的机械部件。工程师为了判断其内部故障,通常转动输入轴,根据发出的声音来判断故障。该诊断方法属于
A、黑箱方法
B、功能模拟法 C、干扰法 D、虚拟试验法
2009年9月
A
例题精析:黑箱方法 ,功能模拟方法
黑箱方法就是通过观测黑箱外部输入信息(外部对黑箱的影响)和输出信息(黑箱对外界的反应),研究和认识其功能、特性、结构、机理。如中医的望闻问切
以功能和行为的相似性为基础,用“模型”模拟“原型”的功能和行为的方法,就是功能模拟法。
20.如图所示为中科院研发的一款智能机器人,能模仿人唱歌、跳舞等。这种用机器人模仿人的功能和行为的方法属于 A.黑箱方法 B.移植方法 C.虚拟方法 D.功能模拟方法
2010.3
D
举一反三:黑箱方法 ,功能模拟方法
20、下列医疗诊断方法中不属于黑箱方法的是
2010.9
B
举一反三:黑箱方法 ,功能模拟方法
25.如图所示为现代农业喷灌控制系统示意图,土壤湿度传感器将检测到的土壤湿度转换成电信号传输给喷灌控制器,与土壤湿度设定值进行比较,当检测到的土壤湿度低于设定值的下限时,喷灌控制器发出信号打开电磁阀,喷头向农作物喷水。当检测到的土壤湿度高于设定值的上限时,喷灌控制器发出信号关闭电磁阀,喷头停止喷水,从而达到自动控制土壤湿度的目的。
2010.9
25.如图所示为现代农业喷灌控制系统示意图,土壤湿度传感器将检测到的土壤湿度转换成电信号传输给喷灌控制器,与土壤湿度设定值进行比较,当检测到的土壤湿度低于设定值的下限时,喷灌控制器发出信号打开电磁阀,喷头向农作物喷水。当检测到的土壤湿度高于设定值的上限时,喷灌控制器发出信号关闭电磁阀,喷头停止喷水,从而达到自动控制土壤湿度的目的。
2010.9
(2)如果要改变土壤湿度的控制范围,需要调整的是__▲__。 (从土壤湿度传感器;土壤湿度设定值;电磁阀中选择一个)
(1)根据示意图及其描述,在控制系统方框图中“__▲__”处填写相应的内容。
土壤湿度传感器
喷灌控制器
电磁阀,喷头
土壤实际湿度
土壤
土壤湿度设定值
25.如图所示为简化的飞机飞行状态控制系统。
陀螺仪检测飞机的飞行状态后将信号送给自动
驾驶仪,自动驾驶仪将飞行状态与给定状态进
行比较,根据偏差值控制舵机运转舵机操纵飞
机尾翼,调整飞行状态。
例题精析:控制系统的方框图
(1)请根据上面的示意图,补充完整飞机飞行状态控制系统方框图。(在“▲”处填写相应的内容)
陀螺仪
控制器
舵机
被控量
(2)陀螺仪将检测到的飞行状态信号传送到自动驾驶仪与给定状态进行比较的过程称为 ▲
(3)在飞机飞行过程中,遇到气流时,飞行状态会发生变化,这种给定状态以外引起飞行状态变化的因素称为 ▲ 。
反馈
干扰因素
例题精析:反馈、干扰因素
在控制系统中,将输出量通过适当的检测装置返回到输入端并与输入量进行比较的过程,就是反馈。
在控制系统中,除输入量(给定值)以外,引起被控量变化的各种因素称为干扰因素。
25、传统列车的动力装置集中安装在机车上,在机车后面挂着许多没有动力装置的客车车厢。我国新开发的动车组把动力装置分散安装在客车车厢上,使其既具有牵引动力,又可以载客,提高了列车的运行速度。如图所示为经过简化的动车牵引传动控制系统示意图。驾驶员向自动驾驶装置发出驾驶指令(设定速度),自动驾驶装置发出信号控制牵引传动装置运转,牵引传动装置驱动车轮转动,从而使动车运行,速度传感器检测动车的实际运行速度,并将测得的速度信号发送给自动驾驶装置与设定的速度进行比较,根据比较偏差值调整动车运行速度。
(2009年3月高考题)
25、传统列车的动力装置集中安装在机车上,在机车后面挂着许多没有动力装置的客车车厢。我国新开发的动车组把动力装置分散安装在客车车厢上,使其既具有牵引动力,又可以载客,提高了列车的运行速度。如图所示为经过简化的动车牵引传动控制系统示意图。驾驶员向自动驾驶装置发出驾驶指令(设定速度),自动驾驶装置发出信号控制牵引传动装置运转,牵引传动装置驱动车轮转动,从而使动车运行,速度传感器检测动车的实际运行速度,并将测得的速度信号发送给自动驾驶装置与设定的速度进行比较,根据比较偏差值调整动车运行速度。
(2009年3月高考题)
动车实际速度
×
自动驾驶装置
牵引传动装置
动车
速度传感器
设定速度
(2)速度传感器将检测到的动车行驶速度信号传送给自动驾驶装置与驾驶指令进行比较的过程称为 ⑥▲
25.如图所示为磁悬浮地球仪及控制系统原理图,控制器发出的交流电信号,通过电感线圈产生交变磁场,使地球仪产生感生电流,由于线圈产生的磁场和地球感生电流的磁场是相斥的,从而产生电磁悬浮力,将地球仪悬浮起来。位置传感器检测地球仪位置,并将检测到的信号发送给控制器与设定信号进行比较,控制器根据比较偏差值调整交流电信号。
(2009年9月高考题)
25.如图所示为磁悬浮地球仪及控制系统原理图,控制器发出的交流电信号,通过电感线圈产生交变磁场,使地球仪产生感生电流,由于线圈产生的磁场和地球感生电流的磁场是相斥的,从而产生电磁悬浮力,将地球仪悬浮起来。位置传感器检测地球仪位置,并将检测到的信号发送给控制器与设定信号进行比较,控制器根据比较偏差值调整交流电信号。
(2009年9月高考题)
地球仪位置
×
控制器
电磁线圈
地球仪
位置传感器
设定信号
25.如图所示为高层楼房自动稳压供水控制系统原理图,其工作原理是:当用户用水量变化时,管道中的水压发生变化,检测装置把检测到的水压信号反馈给控制器,与设定水压进行比较,控制器根据偏差值控制电机及水泵的转速,调节供水量,保持管道中的水压稳定。
(2010年3月高考题)
25.如图所示为高层楼房自动稳压供水控制系统原理图,其工作原理是:当用户用水量变化时,管道中的水压发生变化,检测装置把检测到的水压信号反馈给控制器,与设定水压进行比较,控制器根据偏差值控制电机及水泵的转速,调节供水量,保持管道中的水压稳定。
(2010年3月高考题)
(1)根据示意图及其描述,在控制系统方框图中“ ▲ ”处填写与自动稳压供水控制系统 原理图中相对应的内容。
(2)请为该系统的检测装置选择一个合适的传感器(从水温传感器、水压传感器、水位传感器中选择一个,填在“ ▲ ”处).
(1)根据示意图及其描述,在控制系统方框图中“ ▲ ”处填写与自动稳压供水控制系统 原理图中相对应的内容。
(2)请为该系统的检测装置选择一个合适的传感器(从水温传感器、水压传感器、水位传感器中选择一个,填在“ ▲ ”处).
实际
水压
×
控制器
电机及水泵
管道中的水
水压传感器
设定水压
27、下图是瓦特发明的离心式速度调节器转速自动控制原理图。如图所示,弹簧与调节阀连在一起,当由于某种外界原因(如发动机的负载减小)导致调节臂的转速加快、离心力增大时,则弹簧缩短,调节阀向下移动,阀门通孔截面积减少,输油管内的进油量降低,发动机转速下降。反之,发动机转速下降,带动调节臂的转速下降,则调节阀向上移动,进油量增加。
如图所示是天文望远镜自动跟踪系统。它由可转动望远镜、位置误差传感器、控制电路和电机组成。其跟踪控制过程是:位置误差传感器检测出望远镜的方向,与太阳方向进行比较,将差值信号传递给控制电路,控制电路发出指令并驱动电机运转,从而调节望远镜的指向,使其始终精确指向太阳。
某核电站运行时,高压循环水经过反应堆被加热到300一400度,这些高压循环水再把蒸汽发生器中的水加热成蒸汽用于发电。为了保证系统的正常运行,需要控制循环水的温度,其控制过程是(原理如图所示):热电偶测出循环水的温度,该温度被传送到控制机构与设定的温度进行比较,然后根据偏差值,通过驱动机构调节控制棒,控制反应堆的反应速度,使水温达到预设的值。