第4节 简单机械(杠杆的平衡条件及动态平衡)同步练习(含解析)
文档属性
| 名称 | 第4节 简单机械(杠杆的平衡条件及动态平衡)同步练习(含解析) |
|
|
| 格式 | doc | ||
| 文件大小 | 322.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2021-09-27 00:00:00 | ||
图片预览
文档简介
2021-2022学年浙教版科学杠杆的平衡条件及动态平衡
一.选择题(共10小题)
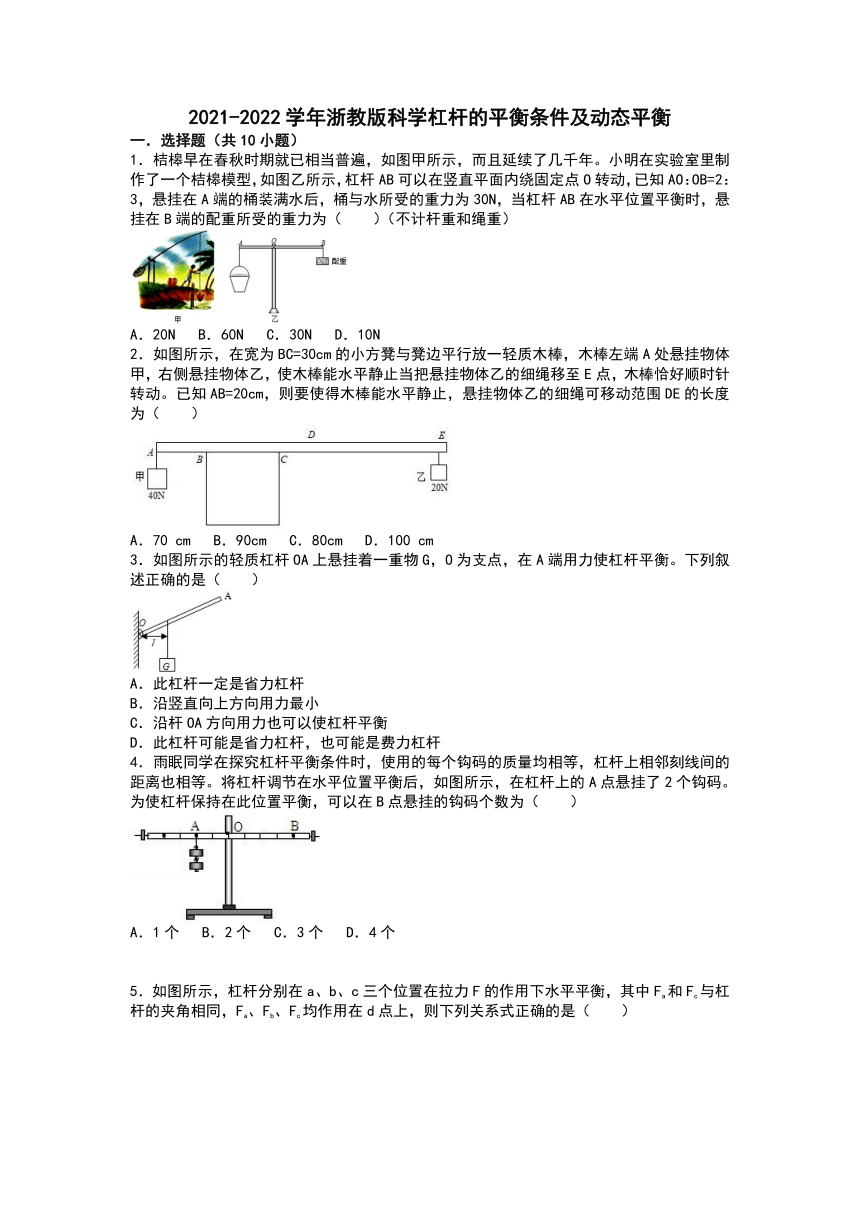
1.桔槔早在春秋时期就已相当普遍,如图甲所示,而且延续了几千年。小明在实验室里制作了一个桔槔模型,如图乙所示,杠杆AB可以在竖直平面内绕固定点O转动,已知AO:OB=2:3,悬挂在A端的桶装满水后,桶与水所受的重力为30N,当杠杆AB在水平位置平衡时,悬挂在B端的配重所受的重力为( )(不计杆重和绳重)
A.20N
B.60N
C.30N
D.10N
2.如图所示,在宽为BC=30cm的小方凳与凳边平行放一轻质木棒,木棒左端A处悬挂物体甲,右侧悬挂物体乙,使木棒能水平静止当把悬挂物体乙的细绳移至E点,木棒恰好顺时针转动。已知AB=20cm,则要使得木棒能水平静止,悬挂物体乙的细绳可移动范围DE的长度为( )
A.70
cm
B.90cm
C.80cm
D.100
cm
3.如图所示的轻质杠杆OA上悬挂着一重物G,O为支点,在A端用力使杠杆平衡。下列叙述正确的是( )
A.此杠杆一定是省力杠杆
B.沿竖直向上方向用力最小
C.沿杆OA方向用力也可以使杠杆平衡
D.此杠杆可能是省力杠杆,也可能是费力杠杆
4.雨眠同学在探究杠杆平衡条件时,使用的每个钩码的质量均相等,杠杆上相邻刻线间的距离也相等。将杠杆调节在水平位置平衡后,如图所示,在杠杆上的A点悬挂了2个钩码。为使杠杆保持在此位置平衡,可以在B点悬挂的钩码个数为( )
A.1个
B.2个
C.3个
D.4个
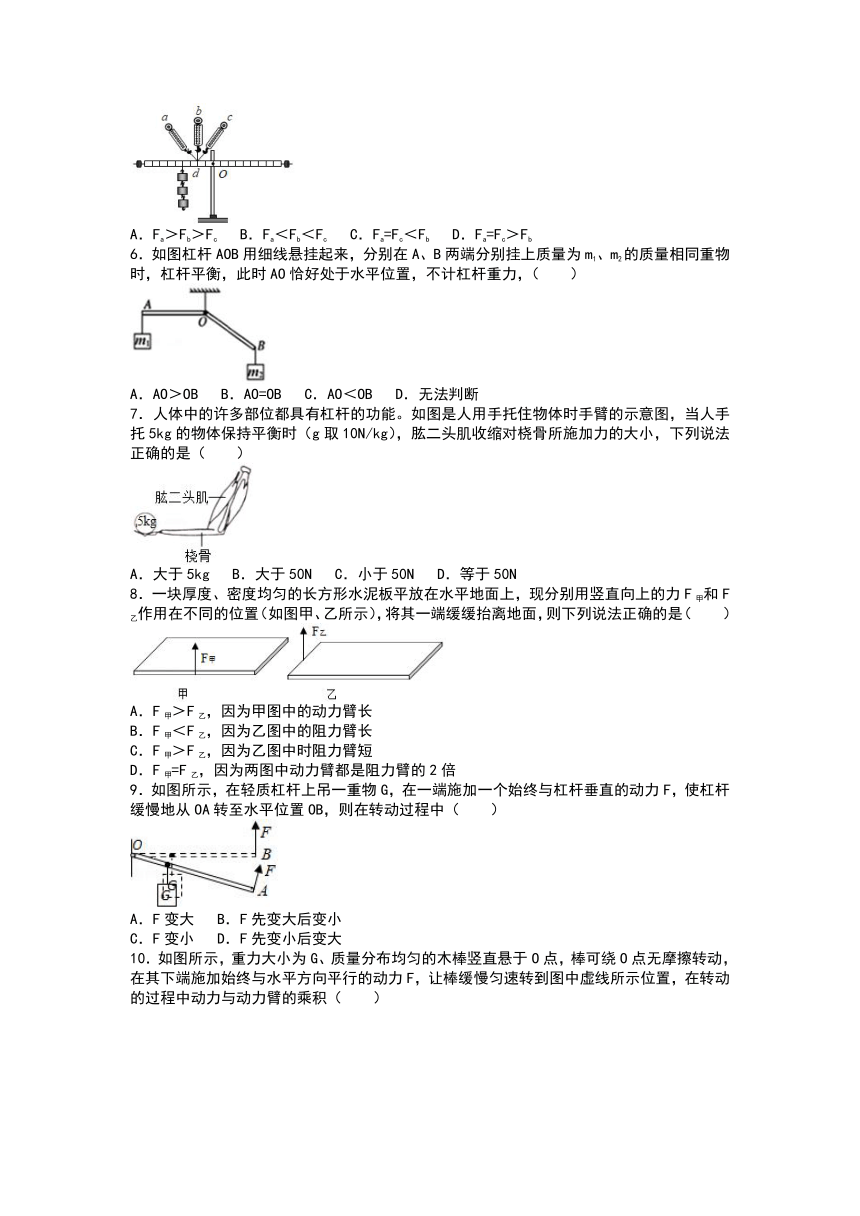
5.如图所示,杠杆分别在a、b、c三个位置在拉力F的作用下水平平衡,其中Fa和Fc与杠杆的夹角相同,Fa、Fb、Fc均作用在d点上,则下列关系式正确的是( )
A.Fa>Fb>Fc
B.Fa<Fb<Fc
C.Fa=Fc<Fb
D.Fa=Fc>Fb
6.如图杠杆AOB用细线悬挂起来,分别在A、B两端分别挂上质量为m1、m2的质量相同重物时,杠杆平衡,此时AO恰好处于水平位置,不计杠杆重力,( )
A.AO>OB
B.AO=OB
C.AO<OB
D.无法判断
7.人体中的许多部位都具有杠杆的功能。如图是人用手托住物体时手臂的示意图,当人手托5kg的物体保持平衡时(g取10N/kg),肱二头肌收缩对桡骨所施加力的大小,下列说法正确的是( )
A.大于5kg
B.大于50N
C.小于50N
D.等于50N
8.一块厚度、密度均匀的长方形水泥板平放在水平地面上,现分别用竖直向上的力F甲和F乙作用在不同的位置(如图甲、乙所示),将其一端缓缓抬离地面,则下列说法正确的是( )
A.F甲>F乙,因为甲图中的动力臂长
B.F甲<F乙,因为乙图中的阻力臂长
C.F甲>F乙,因为乙图中时阻力臂短
D.F甲=F乙,因为两图中动力臂都是阻力臂的2倍
9.如图所示,在轻质杠杆上吊一重物G,在一端施加一个始终与杠杆垂直的动力F,使杠杆缓慢地从OA转至水平位置OB,则在转动过程中( )
A.F变大
B.F先变大后变小
C.F变小
D.F先变小后变大
10.如图所示,重力大小为G、质量分布均匀的木棒竖直悬于O点,棒可绕O点无摩擦转动,在其下端施加始终与水平方向平行的动力F,让棒缓慢匀速转到图中虚线所示位置,在转动的过程中动力与动力臂的乘积( )
A.变大
B.变小
C.保持不变
D.先变大后变小
二.填空题(共8小题)
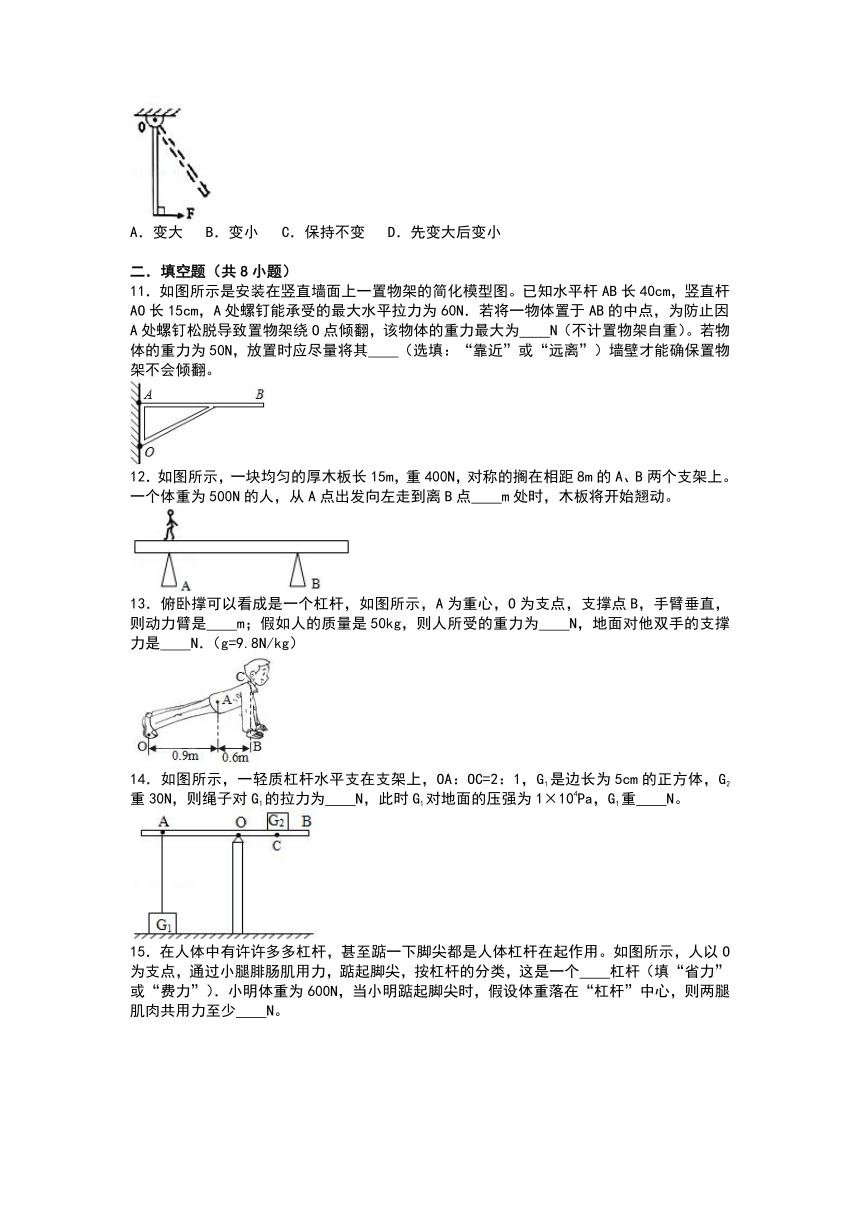
11.如图所示是安装在竖直墙面上一置物架的简化模型图。已知水平杆AB长40cm,竖直杆AO长15cm,A处螺钉能承受的最大水平拉力为60N.若将一物体置于AB的中点,为防止因A处螺钉松脱导致置物架绕O点倾翻,该物体的重力最大为 N(不计置物架自重)。若物体的重力为50N,放置时应尽量将其 (选填:“靠近”或“远离”)墙壁才能确保置物架不会倾翻。
12.如图所示,一块均匀的厚木板长15m,重400N,对称的搁在相距8m的A、B两个支架上。一个体重为500N的人,从A点出发向左走到离B点 m处时,木板将开始翘动。
13.俯卧撑可以看成是一个杠杆,如图所示,A为重心,O为支点,支撑点B,手臂垂直,则动力臂是 m;假如人的质量是50kg,则人所受的重力为 N,地面对他双手的支撑力是 N.(g=9.8N/kg)
14.如图所示,一轻质杠杆水平支在支架上,OA:OC=2:1,G1是边长为5cm的正方体,G2重30N,则绳子对G1的拉力为 N,此时G1对地面的压强为1×104Pa,G1重 N。
15.在人体中有许许多多杠杆,甚至踮一下脚尖都是人体杠杆在起作用。如图所示,人以O为支点,通过小腿腓肠肌用力,踮起脚尖,按杠杆的分类,这是一个 杠杆(填“省力”或“费力”).小明体重为600N,当小明踮起脚尖时,假设体重落在“杠杆”中心,则两腿肌肉共用力至少 N。
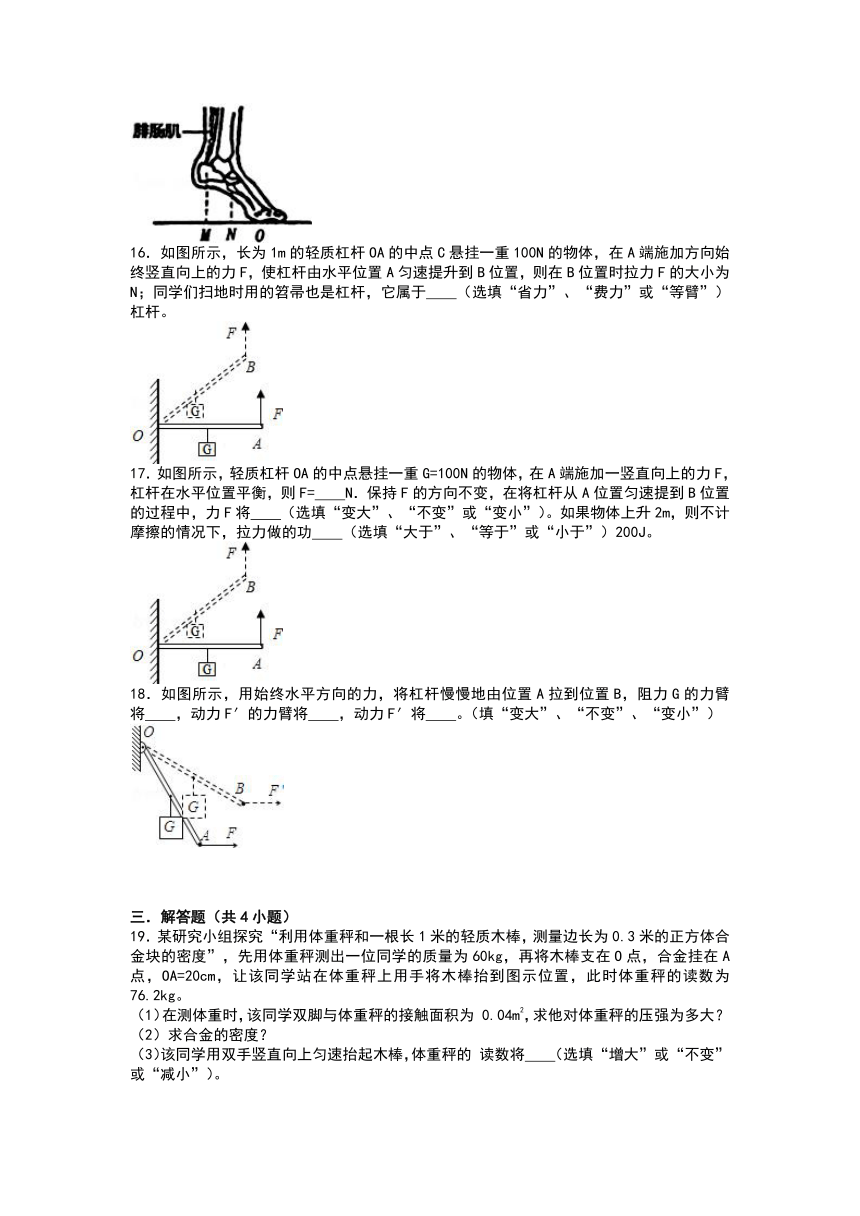
16.如图所示,长为1m的轻质杠杆OA的中点C悬挂一重100N的物体,在A端施加方向始终竖直向上的力F,使杠杆由水平位置A匀速提升到B位置,则在B位置时拉力F的大小为 N;同学们扫地时用的笤帚也是杠杆,它属于 (选填“省力”、“费力”或“等臂”)杠杆。
17.如图所示,轻质杠杆OA的中点悬挂一重G=100N的物体,在A端施加一竖直向上的力F,杠杆在水平位置平衡,则F= N.保持F的方向不变,在将杠杆从A位置匀速提到B位置的过程中,力F将 (选填“变大”、“不变”或“变小”)。如果物体上升2m,则不计摩擦的情况下,拉力做的功 (选填“大于”、“等于”或“小于”)200J。
18.如图所示,用始终水平方向的力,将杠杆慢慢地由位置A拉到位置B,阻力G的力臂将 ,动力F′的力臂将 ,动力F′将 。(填“变大”、“不变”、“变小”)
三.解答题(共4小题)
19.某研究小组探究“利用体重秤和一根长1米的轻质木棒,测量边长为0.3米的正方体合金块的密度”,先用体重秤测出一位同学的质量为60kg,再将木棒支在O点,合金挂在A点,OA=20cm,让该同学站在体重秤上用手将木棒抬到图示位置,此时体重秤的读数为76.2kg。
(1)在测体重时,该同学双脚与体重秤的接触面积为
0.04m2,求他对体重秤的压强为多大?
(2)求合金的密度?
(3)该同学用双手竖直向上匀速抬起木棒,体重秤的
读数将 (选填“增大”或“不变”或“减小”)。
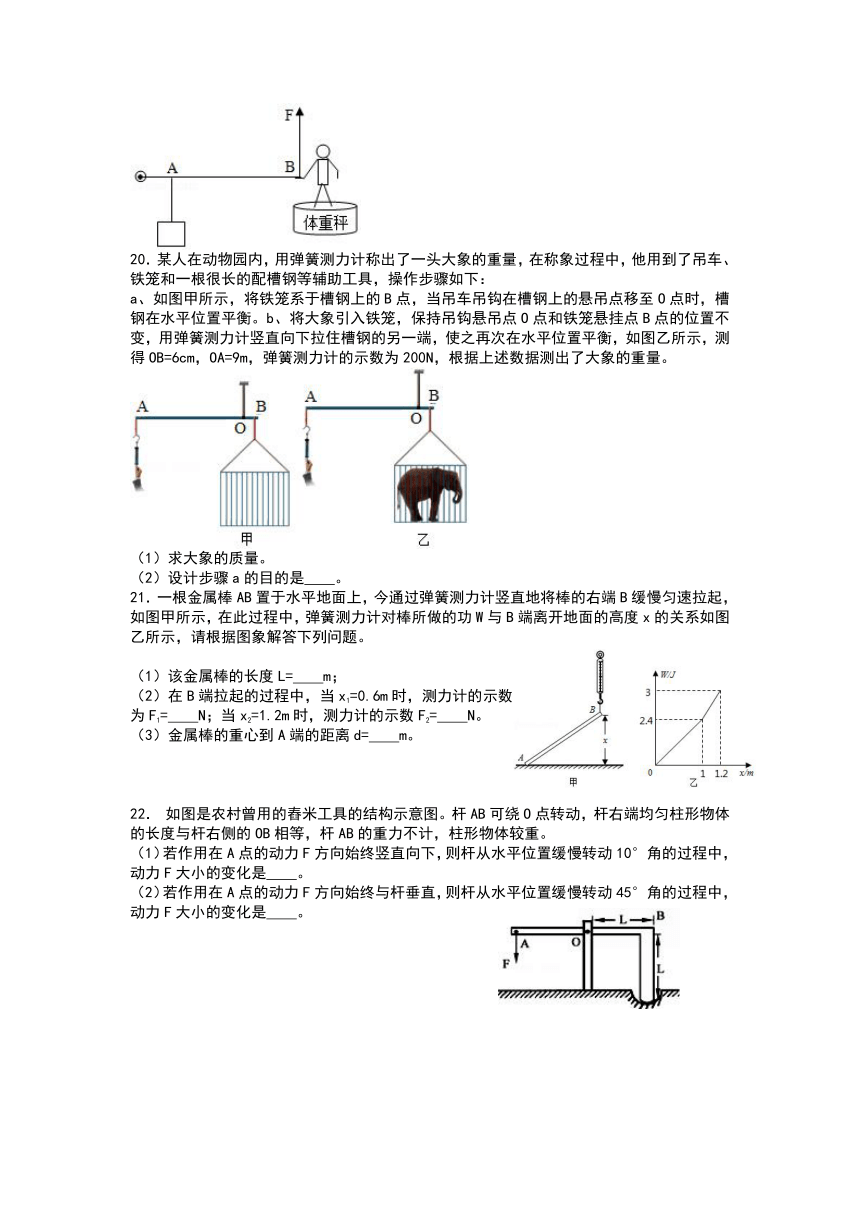
20.某人在动物园内,用弹簧测力计称出了一头大象的重量,在称象过程中,他用到了吊车、铁笼和一根很长的配槽钢等辅助工具,操作步骤如下:
a、如图甲所示,将铁笼系于槽钢上的B点,当吊车吊钩在槽钢上的悬吊点移至O点时,槽钢在水平位置平衡。b、将大象引入铁笼,保持吊钩悬吊点O点和铁笼悬挂点B点的位置不变,用弹簧测力计竖直向下拉住槽钢的另一端,使之再次在水平位置平衡,如图乙所示,测得OB=6cm,OA=9m,弹簧测力计的示数为200N,根据上述数据测出了大象的重量。
(1)求大象的质量。
(2)设计步骤a的目的是 。
21.一根金属棒AB置于水平地面上,今通过弹簧测力计竖直地将棒的右端B缓慢匀速拉起,如图甲所示,在此过程中,弹簧测力计对棒所做的功W与B端离开地面的高度x的关系如图乙所示,请根据图象解答下列问题。
(1)该金属棒的长度L= m;
(2)在B端拉起的过程中,当x1=0.6m时,测力计的示数为F1= N;当x2=1.2m时,测力计的示数F2= N。
(3)金属棒的重心到A端的距离d= m。
22.
如图是农村曾用的舂米工具的结构示意图。杆AB可绕O点转动,杆右端均匀柱形物体的长度与杆右侧的OB相等,杆AB的重力不计,柱形物体较重。
(1)若作用在A点的动力F方向始终竖直向下,则杆从水平位置缓慢转动10°角的过程中,动力F大小的变化是 。
(2)若作用在A点的动力F方向始终与杆垂直,则杆从水平位置缓慢转动45°角的过程中,动力F大小的变化是 。
2021-2022学年浙教版科学杠杆的平衡条件及动态平衡
参考答案与试题解析
一.选择题(共10小题)
1.解:由杠杆平衡条件F1L1=F2L2得:GA×AO=GB×OB,
即:30N×AO=GB×OB,
已知:AO:OB=2:3,解得:GB=20N。
故选:A。
2.解:当把悬挂乙的细绳移至E点时,木棒恰好将顺时针转动,此时支点为C,
由杠杆的平衡条件F1L1=F2L2可得,G甲(LAB+LBC)=G乙LCE,
则LCE=(LAB+LBC)=×(20cm+30cm)=100cm;
当支点位于B点且木棒恰好将逆时针转动时,悬挂乙的细绳移至D点,
由杠杆的平衡条件可得,G甲LAB=G乙(LBC+LCD),
则LCD=LAB﹣LBC)=×20cm﹣30cm=10cm,
所以,要使木棒能水平静止悬挂乙的细绳可移动范围DE长度:
LDE=LCE﹣LCD=100cm﹣10cm=90cm。故ACD不正确,B正确。
故选:B。
3.解:AD、题图中,阻力、阻力臂一定,只知道动力作用点,不知道动力方向,无法确定动力臂的大小,所以无法确定它是哪类杠杆,可能是省力杠杆、可能是费力杠杆,还可能是等臂杠杆,故A错误、D正确;
B、沿垂直杠杆向上的方向用力,动力臂最大,动力最小、最省力,故B错误;
D、沿OA方向动力臂是零,杠杆无法平衡,故C错误。
故选:D。
4.解:设每个钩码的质量为m,杠杆上每一刻度代表的长度为L,则根据杠杆平衡条件F1L1=F2L2可得:
2mg×2L=nmg×4L,
解得在B点悬挂的钩码个数n=1
故选:A。
5.解:杠杆分别在a、b、c三个位置在拉力F的作用下水平平衡,钩码的重力不变,其力臂不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件可知,拉力F与其力臂的乘积也是不变的,由于Fa和Fc与杠杆的夹角相同,所以Fa和Fc的力臂一样长,都小于Fb的力臂,所以Fa=Fc>Fb,故D正确。
故选:D。
6.解:由图根据杠杆的平衡条件知:
m1g?LOA=m2g?LOC
因为m1=m2
所以LOA=LOC
又因OB>OC(直角三角形中斜边大于直角边)
所以AO<OB
故选:C。
7.解:A、力的单位是N,质量的单位是kg,题目是求力的大小,不能用kg做单位,故A错误;
BCD、由图知,物体的重力为G=mg=5kg×10N/kg=50N;
肱二头肌的拉力为动力,物体对手的压力为阻力,支点在肘,如图所示:
所以动力臂小于阻力臂,根据杠杆平衡条件:
F1L1=F2L2
因为L1<L2
所以F1>F2
即肱二头肌收缩所承受的力一定大于50N.故B正确,CD错误。
故选:B。
8.解:两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以两图中动力臂都是阻力臂的2倍。
因为FL动=GL阻,
所以,F==G,
所以,前后两次所用的力相同,即F甲=F乙,故ABC都错误,D正确;
故选:D。
9.解:由图可知,将杠杆缓慢地由最初位置拉到水平位置时,动力臂不变,阻力不变,阻力臂变大,根据杠杆平衡条件F1L1=F2L2可知,动力逐渐变大。
故选:A。
10.解:用水平动力拉动木棒的下端,木棒移至虚线位置的过程中,根据力臂的概念和图示可知,杠杆重力的力臂逐渐变大,杠杆的重力不变(即阻力不变),所以阻力和阻力臂的乘积变大;根据杠杆的平衡条件可知,动力与动力臂的乘积也变大。
故选:A。
二.填空题(共8小题)
11.解:(1)三角架是个杠杆,支点是O,动力FA,动力臂:OA=15cm,阻力G,阻力臂是OD,四边形ACDO是矩形,所以OD=AC=AB=40cm=20cm,
根据杠杆平衡条件得,FA×OA=G×OD
60N×15cm=G×20cm
物体的重力最大为:G=45N;
(2)当动力和动力臂不变时,阻力增大,阻力臂需要减小,物体要靠近墙壁。
故答案为:45;靠近。
12.解:木板重G=400N,木板长15m,重心在木板的中点上,以A为支点,那么木板的重心在离A点右边4m处,即木板重力的力臂L1=4m。当人(重为G′=500N)向左走到距离A点L2远处时,木板将开始翘动,根据杠杆平衡条件:GL1=G′L2
400N×4m=500N×L2
L2==3.2m
A点距B点8m,木板将开始翘动时,人离B点的距离,s=3.2m+8m=11.2m。
故答案为:11.2。
13.解:如图:
O为支点,手臂B处施力为动力,动力臂是OB段距离,重力是阻力,阻力臂是OD段距离,
所以动力臂是:OB=OD+DB=0.9m+0.6m=1.5m。
人所受的重力为:G=mg=50kg×9.8N/kg=490N,
根据杠杆平衡条件得:
F×OB=G×OD,
F×1.5m=490N×0.9m,
解得地面对他双手的支撑力:
F=294N。
故答案为:1.5;490;294。
14.解:(1)由图知,O为支点,G2在C点,设绳子对A端的拉力为FA,已知OA:OC=2:1,则OA=2OC,
由杠杆平衡条件得:FA×OA=G2×OC,
即:FA×2OC=30N×OC,
解得:FA=15N;
(2)物体与地面的接触面积:
S=5cm×5cm=25cm2=0.0025m2;
由p=得,物体G1对地面的压力:
F=pS=1×104Pa×0.0025m2=25N,
地面对物体的支持力:
F′=F=25N;
G1受竖直向下的重力G1、地面向上的支持力F′、绳子向上的拉力FA,
物体G1静止,处于平衡状态,由力的平衡条件得:G1=FA+F′=15N+25N=40N;
故答案为:15;40。
15.解:踮一下脚尖,脚绕O点转动,O为支点。
踮脚尖时,动力臂大于阻力臂,所以这是一个省力杠杆。
如图所示,动力臂为OM,阻力臂为ON,由题意知:OM=2ON,
由杠杆的平衡条件:动力×动力臂=阻力×阻力臂,
即:F×0M=G×0N,
F===×600N=300N。
故答案为:省力;300。
16.解:(1)如图,杠杆在A位置,LOA=2LOC,
因为杠杆平衡,
所以FLOA=GLOC,
所以F==G=×100N=50N;
杠杆在B位置,OA′为动力臂,OC′为阻力臂,阻力不变为G,
因为△OC′D∽△OA′B,
所以OC′:OA′=OD:OB=1:2,
因为杠杆平衡,
所以F′LOA′=GLOC′,
所以F′==G=×100N=50N;
(2)扫帚在使用过程中,动力臂小于阻力臂,为费力杠杆。
故答案为:50;
费力。
17.解:(1)如图,杠杆在A位置,LOA=2LOC,
∵杠杆平衡,
∴FLOA=GLOC,
∴F==G=×100N=50N;
(2)杠杆在B位置,OA′为动力臂,OC′为阻力臂,阻力不变为G,
∵△OC′D∽△OA′B,
∴OC′:OA′=OD:OB=1:2,
∵杠杆平衡,
∴F′LOA′=GLOC′,
∴F′==G=×100N=50N;由此可知当杠杆从A位置匀速提到B位置的过程中,力F的大小不变;
(3)不计摩擦的情况下,拉力做的功W=Fs=Gh=100N×2m=200J.
故答案为:50;不变;等于。
18.解:将杠杆缓慢地由位置A拉到位置B,阻力G的力臂变大,而阻力不变;
力F作用在杠杆一端且始终是水平方向,即方向不变,所以动力臂变小,
根据杠杆平衡条件F1L1=F2L2分析得出动力变大。
故答案为:变大;变小;变大。
三.解答题(共4小题)
19.解:(1)对秤的压力为:F=G=mg=60kg×10N/kg=600N;
对秤的压强为:p===1.5×104Pa;
(2)由题意知,体重计的示数变化为:△m=76.2kg﹣60kg=16.2kg;
根据力的作用的相互性可知,对B的提力F=△mg=16.2kg×10N/kg=162N;
根据杠杆的平衡条件可得G×OA=F×OB,
则G===810N;
则合金的质量为:m===81kg;
体积V=L3=(0.3m)3=2.7×10﹣2m3,
所以,ρ===3×103kg/m3;
(3)如果该同学用双手竖直向上匀速抬起木棒,合金的重力不变,动力臂和阻力臂的比值也不变,所以力F不变,则体重计显示的读数将不变。
故答案为:
(1)他对体重秤的压强为1.5×104Pa;(2)合金的密度为3×103kg/m3;(3)不变。
20.解:(1)如图甲,槽钢与铁笼组成的杠杆在水平位置平衡,
大象引入铁笼后,杠杆仍然在水平位置平衡,
由杠杆的平衡条件有:F×OA=G象×OB,
200N×900cm=G象×6cm,
所以:G象=3×104N;
大象的质量:m象===3×103kg;
(2)设置步骤a的作用:消除槽钢和铁笼重力对杠杆平衡的影响。
答:(1)大象的质量3×103kg;
(2)消除槽钢重力对杠杆平衡的影响。
21.解:
(1)由于拉力始终竖直向上,杠杆的平衡条件可知,拉力不变(动力臂与阻力臂之比不变)。
由图甲可知,当B端离地1m时,A端刚离地,所以金属棒长1米;
(2)因为W=Gh,
所以金属棒的重力G===3N,即F2=3N;
杆未离地前,动力臂与阻力臂的比值不变,拉力大小不变,
由图乙可知拉力F1===2.4N;
(3)由杠杆平衡条件得,
重心到A端的距离d==0.8m。
答:(1)1;
(2)2.4;3;
(3)0.8。
22.解:(1)杆从水平位置缓慢转动10
度时,动力臂减小,因为OB与柱形物体固定,始终垂直,阻力为圆柱形物体的重力,阻力臂为L,当转动后,阻力臂的作用点提升,阻力向右移动,所以O点到阻力的作用线,即阻力臂增大,根据杠杆平衡原理,则阻力不变,阻力臂增大,动力臂减小,则动力增大。
(2)在杆从水平位置缓慢转动45°角过程中,如图所示,拉力F2的方向始终与杆垂直,故动力臂不变。阻力臂先增大,当柱形物体的重心P在竖直方向上升L,即重心P上升到水平位置时,阻力臂最大,此后阻力臂减小,当杠杆转动45度时,P在竖直方向上升+.因此整个过程中阻力臂先变大后变小,由杠杆平衡可知,动力F先增大后减小。
故答案为:(1)增大;(2)先增大后减小。
一.选择题(共10小题)
1.桔槔早在春秋时期就已相当普遍,如图甲所示,而且延续了几千年。小明在实验室里制作了一个桔槔模型,如图乙所示,杠杆AB可以在竖直平面内绕固定点O转动,已知AO:OB=2:3,悬挂在A端的桶装满水后,桶与水所受的重力为30N,当杠杆AB在水平位置平衡时,悬挂在B端的配重所受的重力为( )(不计杆重和绳重)
A.20N
B.60N
C.30N
D.10N
2.如图所示,在宽为BC=30cm的小方凳与凳边平行放一轻质木棒,木棒左端A处悬挂物体甲,右侧悬挂物体乙,使木棒能水平静止当把悬挂物体乙的细绳移至E点,木棒恰好顺时针转动。已知AB=20cm,则要使得木棒能水平静止,悬挂物体乙的细绳可移动范围DE的长度为( )
A.70
cm
B.90cm
C.80cm
D.100
cm
3.如图所示的轻质杠杆OA上悬挂着一重物G,O为支点,在A端用力使杠杆平衡。下列叙述正确的是( )
A.此杠杆一定是省力杠杆
B.沿竖直向上方向用力最小
C.沿杆OA方向用力也可以使杠杆平衡
D.此杠杆可能是省力杠杆,也可能是费力杠杆
4.雨眠同学在探究杠杆平衡条件时,使用的每个钩码的质量均相等,杠杆上相邻刻线间的距离也相等。将杠杆调节在水平位置平衡后,如图所示,在杠杆上的A点悬挂了2个钩码。为使杠杆保持在此位置平衡,可以在B点悬挂的钩码个数为( )
A.1个
B.2个
C.3个
D.4个
5.如图所示,杠杆分别在a、b、c三个位置在拉力F的作用下水平平衡,其中Fa和Fc与杠杆的夹角相同,Fa、Fb、Fc均作用在d点上,则下列关系式正确的是( )
A.Fa>Fb>Fc
B.Fa<Fb<Fc
C.Fa=Fc<Fb
D.Fa=Fc>Fb
6.如图杠杆AOB用细线悬挂起来,分别在A、B两端分别挂上质量为m1、m2的质量相同重物时,杠杆平衡,此时AO恰好处于水平位置,不计杠杆重力,( )
A.AO>OB
B.AO=OB
C.AO<OB
D.无法判断
7.人体中的许多部位都具有杠杆的功能。如图是人用手托住物体时手臂的示意图,当人手托5kg的物体保持平衡时(g取10N/kg),肱二头肌收缩对桡骨所施加力的大小,下列说法正确的是( )
A.大于5kg
B.大于50N
C.小于50N
D.等于50N
8.一块厚度、密度均匀的长方形水泥板平放在水平地面上,现分别用竖直向上的力F甲和F乙作用在不同的位置(如图甲、乙所示),将其一端缓缓抬离地面,则下列说法正确的是( )
A.F甲>F乙,因为甲图中的动力臂长
B.F甲<F乙,因为乙图中的阻力臂长
C.F甲>F乙,因为乙图中时阻力臂短
D.F甲=F乙,因为两图中动力臂都是阻力臂的2倍
9.如图所示,在轻质杠杆上吊一重物G,在一端施加一个始终与杠杆垂直的动力F,使杠杆缓慢地从OA转至水平位置OB,则在转动过程中( )
A.F变大
B.F先变大后变小
C.F变小
D.F先变小后变大
10.如图所示,重力大小为G、质量分布均匀的木棒竖直悬于O点,棒可绕O点无摩擦转动,在其下端施加始终与水平方向平行的动力F,让棒缓慢匀速转到图中虚线所示位置,在转动的过程中动力与动力臂的乘积( )
A.变大
B.变小
C.保持不变
D.先变大后变小
二.填空题(共8小题)
11.如图所示是安装在竖直墙面上一置物架的简化模型图。已知水平杆AB长40cm,竖直杆AO长15cm,A处螺钉能承受的最大水平拉力为60N.若将一物体置于AB的中点,为防止因A处螺钉松脱导致置物架绕O点倾翻,该物体的重力最大为 N(不计置物架自重)。若物体的重力为50N,放置时应尽量将其 (选填:“靠近”或“远离”)墙壁才能确保置物架不会倾翻。
12.如图所示,一块均匀的厚木板长15m,重400N,对称的搁在相距8m的A、B两个支架上。一个体重为500N的人,从A点出发向左走到离B点 m处时,木板将开始翘动。
13.俯卧撑可以看成是一个杠杆,如图所示,A为重心,O为支点,支撑点B,手臂垂直,则动力臂是 m;假如人的质量是50kg,则人所受的重力为 N,地面对他双手的支撑力是 N.(g=9.8N/kg)
14.如图所示,一轻质杠杆水平支在支架上,OA:OC=2:1,G1是边长为5cm的正方体,G2重30N,则绳子对G1的拉力为 N,此时G1对地面的压强为1×104Pa,G1重 N。
15.在人体中有许许多多杠杆,甚至踮一下脚尖都是人体杠杆在起作用。如图所示,人以O为支点,通过小腿腓肠肌用力,踮起脚尖,按杠杆的分类,这是一个 杠杆(填“省力”或“费力”).小明体重为600N,当小明踮起脚尖时,假设体重落在“杠杆”中心,则两腿肌肉共用力至少 N。
16.如图所示,长为1m的轻质杠杆OA的中点C悬挂一重100N的物体,在A端施加方向始终竖直向上的力F,使杠杆由水平位置A匀速提升到B位置,则在B位置时拉力F的大小为 N;同学们扫地时用的笤帚也是杠杆,它属于 (选填“省力”、“费力”或“等臂”)杠杆。
17.如图所示,轻质杠杆OA的中点悬挂一重G=100N的物体,在A端施加一竖直向上的力F,杠杆在水平位置平衡,则F= N.保持F的方向不变,在将杠杆从A位置匀速提到B位置的过程中,力F将 (选填“变大”、“不变”或“变小”)。如果物体上升2m,则不计摩擦的情况下,拉力做的功 (选填“大于”、“等于”或“小于”)200J。
18.如图所示,用始终水平方向的力,将杠杆慢慢地由位置A拉到位置B,阻力G的力臂将 ,动力F′的力臂将 ,动力F′将 。(填“变大”、“不变”、“变小”)
三.解答题(共4小题)
19.某研究小组探究“利用体重秤和一根长1米的轻质木棒,测量边长为0.3米的正方体合金块的密度”,先用体重秤测出一位同学的质量为60kg,再将木棒支在O点,合金挂在A点,OA=20cm,让该同学站在体重秤上用手将木棒抬到图示位置,此时体重秤的读数为76.2kg。
(1)在测体重时,该同学双脚与体重秤的接触面积为
0.04m2,求他对体重秤的压强为多大?
(2)求合金的密度?
(3)该同学用双手竖直向上匀速抬起木棒,体重秤的
读数将 (选填“增大”或“不变”或“减小”)。
20.某人在动物园内,用弹簧测力计称出了一头大象的重量,在称象过程中,他用到了吊车、铁笼和一根很长的配槽钢等辅助工具,操作步骤如下:
a、如图甲所示,将铁笼系于槽钢上的B点,当吊车吊钩在槽钢上的悬吊点移至O点时,槽钢在水平位置平衡。b、将大象引入铁笼,保持吊钩悬吊点O点和铁笼悬挂点B点的位置不变,用弹簧测力计竖直向下拉住槽钢的另一端,使之再次在水平位置平衡,如图乙所示,测得OB=6cm,OA=9m,弹簧测力计的示数为200N,根据上述数据测出了大象的重量。
(1)求大象的质量。
(2)设计步骤a的目的是 。
21.一根金属棒AB置于水平地面上,今通过弹簧测力计竖直地将棒的右端B缓慢匀速拉起,如图甲所示,在此过程中,弹簧测力计对棒所做的功W与B端离开地面的高度x的关系如图乙所示,请根据图象解答下列问题。
(1)该金属棒的长度L= m;
(2)在B端拉起的过程中,当x1=0.6m时,测力计的示数为F1= N;当x2=1.2m时,测力计的示数F2= N。
(3)金属棒的重心到A端的距离d= m。
22.
如图是农村曾用的舂米工具的结构示意图。杆AB可绕O点转动,杆右端均匀柱形物体的长度与杆右侧的OB相等,杆AB的重力不计,柱形物体较重。
(1)若作用在A点的动力F方向始终竖直向下,则杆从水平位置缓慢转动10°角的过程中,动力F大小的变化是 。
(2)若作用在A点的动力F方向始终与杆垂直,则杆从水平位置缓慢转动45°角的过程中,动力F大小的变化是 。
2021-2022学年浙教版科学杠杆的平衡条件及动态平衡
参考答案与试题解析
一.选择题(共10小题)
1.解:由杠杆平衡条件F1L1=F2L2得:GA×AO=GB×OB,
即:30N×AO=GB×OB,
已知:AO:OB=2:3,解得:GB=20N。
故选:A。
2.解:当把悬挂乙的细绳移至E点时,木棒恰好将顺时针转动,此时支点为C,
由杠杆的平衡条件F1L1=F2L2可得,G甲(LAB+LBC)=G乙LCE,
则LCE=(LAB+LBC)=×(20cm+30cm)=100cm;
当支点位于B点且木棒恰好将逆时针转动时,悬挂乙的细绳移至D点,
由杠杆的平衡条件可得,G甲LAB=G乙(LBC+LCD),
则LCD=LAB﹣LBC)=×20cm﹣30cm=10cm,
所以,要使木棒能水平静止悬挂乙的细绳可移动范围DE长度:
LDE=LCE﹣LCD=100cm﹣10cm=90cm。故ACD不正确,B正确。
故选:B。
3.解:AD、题图中,阻力、阻力臂一定,只知道动力作用点,不知道动力方向,无法确定动力臂的大小,所以无法确定它是哪类杠杆,可能是省力杠杆、可能是费力杠杆,还可能是等臂杠杆,故A错误、D正确;
B、沿垂直杠杆向上的方向用力,动力臂最大,动力最小、最省力,故B错误;
D、沿OA方向动力臂是零,杠杆无法平衡,故C错误。
故选:D。
4.解:设每个钩码的质量为m,杠杆上每一刻度代表的长度为L,则根据杠杆平衡条件F1L1=F2L2可得:
2mg×2L=nmg×4L,
解得在B点悬挂的钩码个数n=1
故选:A。
5.解:杠杆分别在a、b、c三个位置在拉力F的作用下水平平衡,钩码的重力不变,其力臂不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件可知,拉力F与其力臂的乘积也是不变的,由于Fa和Fc与杠杆的夹角相同,所以Fa和Fc的力臂一样长,都小于Fb的力臂,所以Fa=Fc>Fb,故D正确。
故选:D。
6.解:由图根据杠杆的平衡条件知:
m1g?LOA=m2g?LOC
因为m1=m2
所以LOA=LOC
又因OB>OC(直角三角形中斜边大于直角边)
所以AO<OB
故选:C。
7.解:A、力的单位是N,质量的单位是kg,题目是求力的大小,不能用kg做单位,故A错误;
BCD、由图知,物体的重力为G=mg=5kg×10N/kg=50N;
肱二头肌的拉力为动力,物体对手的压力为阻力,支点在肘,如图所示:
所以动力臂小于阻力臂,根据杠杆平衡条件:
F1L1=F2L2
因为L1<L2
所以F1>F2
即肱二头肌收缩所承受的力一定大于50N.故B正确,CD错误。
故选:B。
8.解:两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以两图中动力臂都是阻力臂的2倍。
因为FL动=GL阻,
所以,F==G,
所以,前后两次所用的力相同,即F甲=F乙,故ABC都错误,D正确;
故选:D。
9.解:由图可知,将杠杆缓慢地由最初位置拉到水平位置时,动力臂不变,阻力不变,阻力臂变大,根据杠杆平衡条件F1L1=F2L2可知,动力逐渐变大。
故选:A。
10.解:用水平动力拉动木棒的下端,木棒移至虚线位置的过程中,根据力臂的概念和图示可知,杠杆重力的力臂逐渐变大,杠杆的重力不变(即阻力不变),所以阻力和阻力臂的乘积变大;根据杠杆的平衡条件可知,动力与动力臂的乘积也变大。
故选:A。
二.填空题(共8小题)
11.解:(1)三角架是个杠杆,支点是O,动力FA,动力臂:OA=15cm,阻力G,阻力臂是OD,四边形ACDO是矩形,所以OD=AC=AB=40cm=20cm,
根据杠杆平衡条件得,FA×OA=G×OD
60N×15cm=G×20cm
物体的重力最大为:G=45N;
(2)当动力和动力臂不变时,阻力增大,阻力臂需要减小,物体要靠近墙壁。
故答案为:45;靠近。
12.解:木板重G=400N,木板长15m,重心在木板的中点上,以A为支点,那么木板的重心在离A点右边4m处,即木板重力的力臂L1=4m。当人(重为G′=500N)向左走到距离A点L2远处时,木板将开始翘动,根据杠杆平衡条件:GL1=G′L2
400N×4m=500N×L2
L2==3.2m
A点距B点8m,木板将开始翘动时,人离B点的距离,s=3.2m+8m=11.2m。
故答案为:11.2。
13.解:如图:
O为支点,手臂B处施力为动力,动力臂是OB段距离,重力是阻力,阻力臂是OD段距离,
所以动力臂是:OB=OD+DB=0.9m+0.6m=1.5m。
人所受的重力为:G=mg=50kg×9.8N/kg=490N,
根据杠杆平衡条件得:
F×OB=G×OD,
F×1.5m=490N×0.9m,
解得地面对他双手的支撑力:
F=294N。
故答案为:1.5;490;294。
14.解:(1)由图知,O为支点,G2在C点,设绳子对A端的拉力为FA,已知OA:OC=2:1,则OA=2OC,
由杠杆平衡条件得:FA×OA=G2×OC,
即:FA×2OC=30N×OC,
解得:FA=15N;
(2)物体与地面的接触面积:
S=5cm×5cm=25cm2=0.0025m2;
由p=得,物体G1对地面的压力:
F=pS=1×104Pa×0.0025m2=25N,
地面对物体的支持力:
F′=F=25N;
G1受竖直向下的重力G1、地面向上的支持力F′、绳子向上的拉力FA,
物体G1静止,处于平衡状态,由力的平衡条件得:G1=FA+F′=15N+25N=40N;
故答案为:15;40。
15.解:踮一下脚尖,脚绕O点转动,O为支点。
踮脚尖时,动力臂大于阻力臂,所以这是一个省力杠杆。
如图所示,动力臂为OM,阻力臂为ON,由题意知:OM=2ON,
由杠杆的平衡条件:动力×动力臂=阻力×阻力臂,
即:F×0M=G×0N,
F===×600N=300N。
故答案为:省力;300。
16.解:(1)如图,杠杆在A位置,LOA=2LOC,
因为杠杆平衡,
所以FLOA=GLOC,
所以F==G=×100N=50N;
杠杆在B位置,OA′为动力臂,OC′为阻力臂,阻力不变为G,
因为△OC′D∽△OA′B,
所以OC′:OA′=OD:OB=1:2,
因为杠杆平衡,
所以F′LOA′=GLOC′,
所以F′==G=×100N=50N;
(2)扫帚在使用过程中,动力臂小于阻力臂,为费力杠杆。
故答案为:50;
费力。
17.解:(1)如图,杠杆在A位置,LOA=2LOC,
∵杠杆平衡,
∴FLOA=GLOC,
∴F==G=×100N=50N;
(2)杠杆在B位置,OA′为动力臂,OC′为阻力臂,阻力不变为G,
∵△OC′D∽△OA′B,
∴OC′:OA′=OD:OB=1:2,
∵杠杆平衡,
∴F′LOA′=GLOC′,
∴F′==G=×100N=50N;由此可知当杠杆从A位置匀速提到B位置的过程中,力F的大小不变;
(3)不计摩擦的情况下,拉力做的功W=Fs=Gh=100N×2m=200J.
故答案为:50;不变;等于。
18.解:将杠杆缓慢地由位置A拉到位置B,阻力G的力臂变大,而阻力不变;
力F作用在杠杆一端且始终是水平方向,即方向不变,所以动力臂变小,
根据杠杆平衡条件F1L1=F2L2分析得出动力变大。
故答案为:变大;变小;变大。
三.解答题(共4小题)
19.解:(1)对秤的压力为:F=G=mg=60kg×10N/kg=600N;
对秤的压强为:p===1.5×104Pa;
(2)由题意知,体重计的示数变化为:△m=76.2kg﹣60kg=16.2kg;
根据力的作用的相互性可知,对B的提力F=△mg=16.2kg×10N/kg=162N;
根据杠杆的平衡条件可得G×OA=F×OB,
则G===810N;
则合金的质量为:m===81kg;
体积V=L3=(0.3m)3=2.7×10﹣2m3,
所以,ρ===3×103kg/m3;
(3)如果该同学用双手竖直向上匀速抬起木棒,合金的重力不变,动力臂和阻力臂的比值也不变,所以力F不变,则体重计显示的读数将不变。
故答案为:
(1)他对体重秤的压强为1.5×104Pa;(2)合金的密度为3×103kg/m3;(3)不变。
20.解:(1)如图甲,槽钢与铁笼组成的杠杆在水平位置平衡,
大象引入铁笼后,杠杆仍然在水平位置平衡,
由杠杆的平衡条件有:F×OA=G象×OB,
200N×900cm=G象×6cm,
所以:G象=3×104N;
大象的质量:m象===3×103kg;
(2)设置步骤a的作用:消除槽钢和铁笼重力对杠杆平衡的影响。
答:(1)大象的质量3×103kg;
(2)消除槽钢重力对杠杆平衡的影响。
21.解:
(1)由于拉力始终竖直向上,杠杆的平衡条件可知,拉力不变(动力臂与阻力臂之比不变)。
由图甲可知,当B端离地1m时,A端刚离地,所以金属棒长1米;
(2)因为W=Gh,
所以金属棒的重力G===3N,即F2=3N;
杆未离地前,动力臂与阻力臂的比值不变,拉力大小不变,
由图乙可知拉力F1===2.4N;
(3)由杠杆平衡条件得,
重心到A端的距离d==0.8m。
答:(1)1;
(2)2.4;3;
(3)0.8。
22.解:(1)杆从水平位置缓慢转动10
度时,动力臂减小,因为OB与柱形物体固定,始终垂直,阻力为圆柱形物体的重力,阻力臂为L,当转动后,阻力臂的作用点提升,阻力向右移动,所以O点到阻力的作用线,即阻力臂增大,根据杠杆平衡原理,则阻力不变,阻力臂增大,动力臂减小,则动力增大。
(2)在杆从水平位置缓慢转动45°角过程中,如图所示,拉力F2的方向始终与杆垂直,故动力臂不变。阻力臂先增大,当柱形物体的重心P在竖直方向上升L,即重心P上升到水平位置时,阻力臂最大,此后阻力臂减小,当杠杆转动45度时,P在竖直方向上升+.因此整个过程中阻力臂先变大后变小,由杠杆平衡可知,动力F先增大后减小。
故答案为:(1)增大;(2)先增大后减小。
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿