3.4简单机械(杠杆的平衡条件的实验探究) 同步练习(含解析)
文档属性
| 名称 | 3.4简单机械(杠杆的平衡条件的实验探究) 同步练习(含解析) |
|
|
| 格式 | doc | ||
| 文件大小 | 145.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2021-10-07 00:00:00 | ||
图片预览
文档简介
2021-2022学年浙教版科学杠杆的平衡条件的实验探究
一.选择题(共3小题)
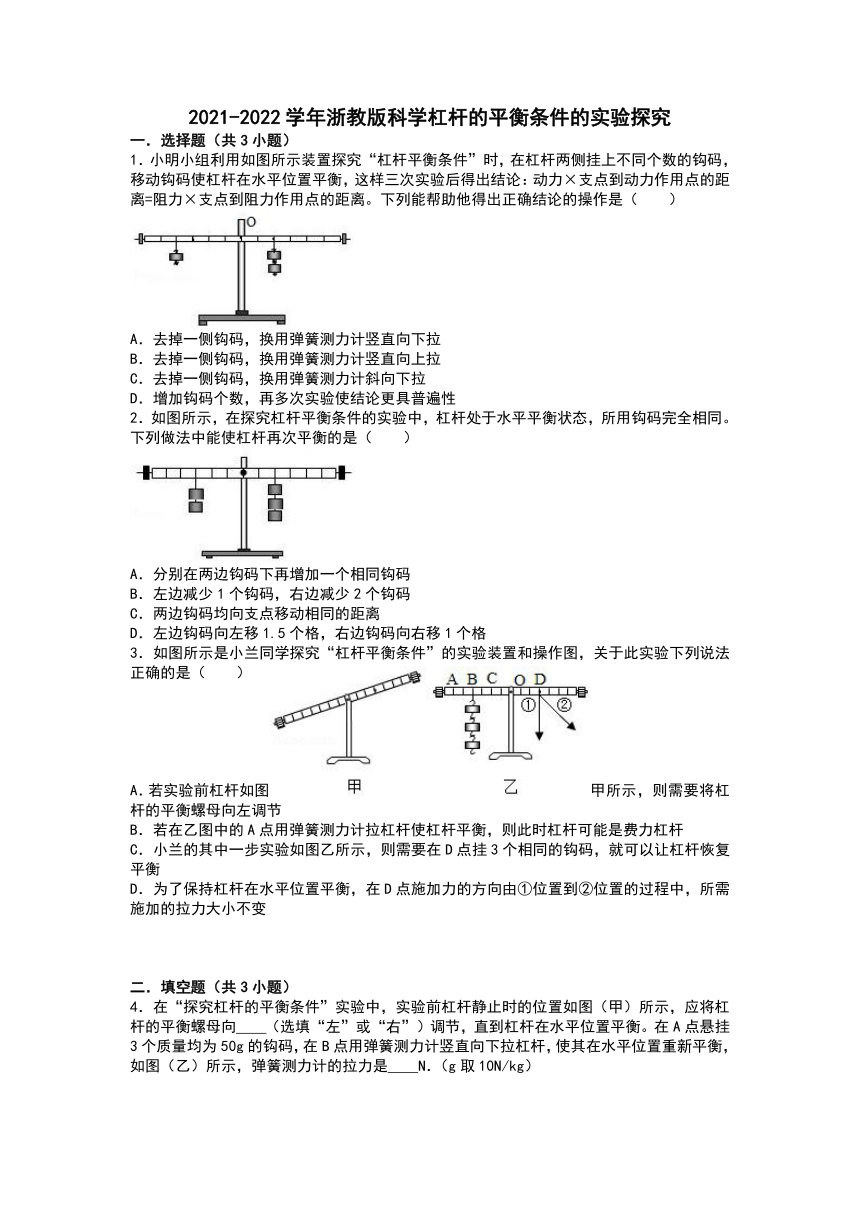
1.小明小组利用如图所示装置探究“杠杆平衡条件”时,在杠杆两侧挂上不同个数的钩码,移动钩码使杠杆在水平位置平衡,这样三次实验后得出结论:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。下列能帮助他得出正确结论的操作是( )
A.去掉一侧钩码,换用弹簧测力计竖直向下拉
B.去掉一侧钩码,换用弹簧测力计竖直向上拉
C.去掉一侧钩码,换用弹簧测力计斜向下拉
D.增加钩码个数,再多次实验使结论更具普遍性
2.如图所示,在探究杠杆平衡条件的实验中,杠杆处于水平平衡状态,所用钩码完全相同。下列做法中能使杠杆再次平衡的是( )
A.分别在两边钩码下再增加一个相同钩码
B.左边减少1个钩码,右边减少2个钩码
C.两边钩码均向支点移动相同的距离
D.左边钩码向左移1.5个格,右边钩码向右移1个格
3.如图所示是小兰同学探究“杠杆平衡条件”的实验装置和操作图,关于此实验下列说法正确的是( )
A.若实验前杠杆如图甲所示,则需要将杠杆的平衡螺母向左调节
B.若在乙图中的A点用弹簧测力计拉杠杆使杠杆平衡,则此时杠杆可能是费力杠杆
C.小兰的其中一步实验如图乙所示,则需要在D点挂3个相同的钩码,就可以让杠杆恢复平衡
D.为了保持杠杆在水平位置平衡,在D点施加力的方向由①位置到②位置的过程中,所需施加的拉力大小不变
二.填空题(共3小题)
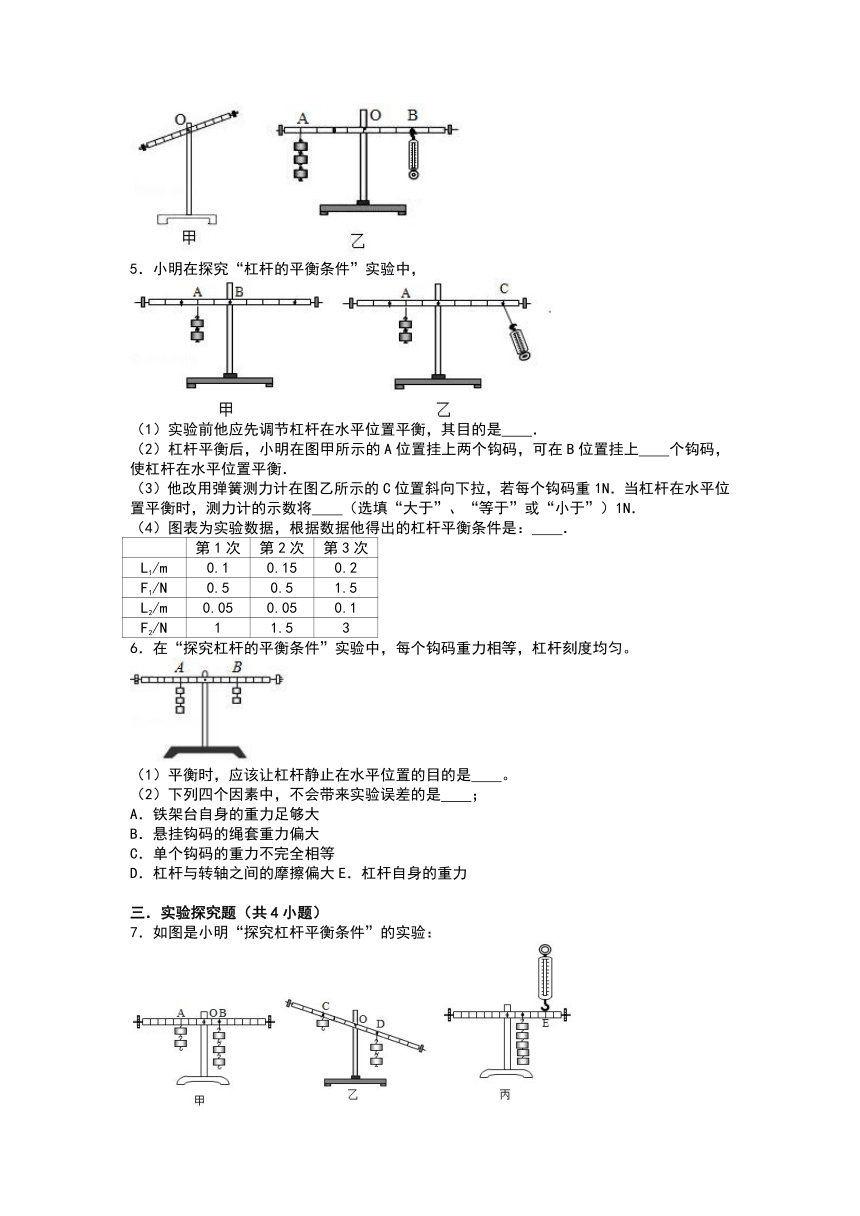
4.在“探究杠杆的平衡条件”实验中,实验前杠杆静止时的位置如图(甲)所示,应将杠杆的平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡。在A点悬挂3个质量均为50g的钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置重新平衡,如图(乙)所示,弹簧测力计的拉力是 N.(g取10N/kg)
5.小明在探究“杠杆的平衡条件”实验中,
(1)实验前他应先调节杠杆在水平位置平衡,其目的是 .
(2)杠杆平衡后,小明在图甲所示的A位置挂上两个钩码,可在B位置挂上 个钩码,使杠杆在水平位置平衡.
(3)他改用弹簧测力计在图乙所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将 (选填“大于”、“等于”或“小于”)1N.
(4)图表为实验数据,根据数据他得出的杠杆平衡条件是: .
第1次
第2次
第3次
L1/m
0.1
0.15
0.2
F1/N
0.5
0.5
1.5
L2/m
0.05
0.05
0.1
F2/N
1
1.5
3
6.在“探究杠杆的平衡条件”实验中,每个钩码重力相等,杠杆刻度均匀。
(1)平衡时,应该让杠杆静止在水平位置的目的是 。
(2)下列四个因素中,不会带来实验误差的是 ;
A.铁架台自身的重力足够大
B.悬挂钩码的绳套重力偏大
C.单个钩码的重力不完全相等
D.杠杆与转轴之间的摩擦偏大E.杠杆自身的重力
三.实验探究题(共4小题)
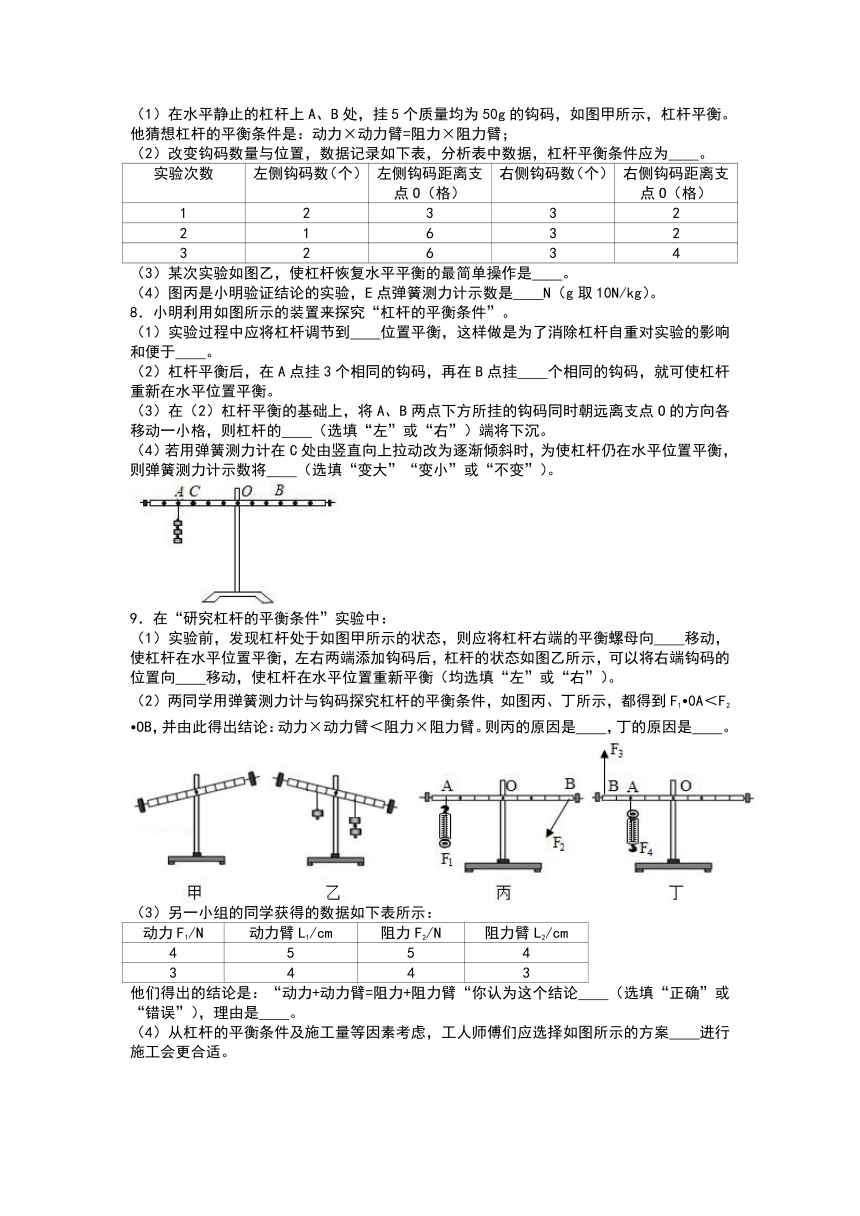
7.如图是小明“探究杠杆平衡条件”的实验:
(1)在水平静止的杠杆上A、B处,挂5个质量均为50g的钩码,如图甲所示,杠杆平衡。他猜想杠杆的平衡条件是:动力×动力臂=阻力×阻力臂;
(2)改变钩码数量与位置,数据记录如下表,分析表中数据,杠杆平衡条件应为 。
实验次数
左侧钩码数(个)
左侧钩码距离支点O(格)
右侧钩码数(个)
右侧钩码距离支点O(格)
1
2
3
3
2
2
1
6
3
2
3
2
6
3
4
(3)某次实验如图乙,使杠杆恢复水平平衡的最简单操作是 。
(4)图丙是小明验证结论的实验,E点弹簧测力计示数是 N(g取10N/kg)。
8.小明利用如图所示的装置来探究“杠杆的平衡条件”。
(1)实验过程中应将杠杆调节到 位置平衡,这样做是为了消除杠杆自重对实验的影响和便于 。
(2)杠杆平衡后,在A点挂3个相同的钩码,再在B点挂 个相同的钩码,就可使杠杆重新在水平位置平衡。
(3)在(2)杠杆平衡的基础上,将A、B两点下方所挂的钩码同时朝远离支点O的方向各移动一小格,则杠杆的 (选填“左”或“右”)端将下沉。
(4)若用弹簧测力计在C处由竖直向上拉动改为逐渐倾斜时,为使杠杆仍在水平位置平衡,则弹簧测力计示数将 (选填“变大”“变小”或“不变”)。
9.在“研究杠杆的平衡条件”实验中:
(1)实验前,发现杠杆处于如图甲所示的状态,则应将杠杆右端的平衡螺母向 移动,使杠杆在水平位置平衡,左右两端添加钩码后,杠杆的状态如图乙所示,可以将右端钩码的位置向 移动,使杠杆在水平位置重新平衡(均选填“左”或“右”)。
(2)两同学用弹簧测力计与钩码探究杠杆的平衡条件,如图丙、丁所示,都得到F1?0A<F2?OB,并由此得出结论:动力×动力臂<阻力×阻力臂。则丙的原因是 ,丁的原因是 。
(3)另一小组的同学获得的数据如下表所示:
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
4
5
5
4
3
4
4
3
他们得出的结论是:“动力+动力臂=阻力+阻力臂“你认为这个结论 (选填“正确”或“错误”),理由是 。
(4)从杠杆的平衡条件及施工量等因素考虑,工人师傅们应选择如图所示的方案 进行施工会更合适。
10.小梅和小红在做探究杠杆平衡条件的实验,已知每个钩码重0.5N:
(1)实验前,杠杆的位置如图甲所示,应将两端的平衡螺母向 移动,使杠杆在水平位置平衡;
(2)杠杆调平后,在其两边分别排上不同数量的钩码并移动,仍使杠杆在水平位置平衡,目的是 ;
(3)如图乙所示,杠杆在水平位置平衡,小梅将两侧的钩码都向外移动一格。则杠杆的
(选填“左”或“右”)端将下沉;
(4)小红用图丙所示的装置进行实验探究,发现杠杆在水平位置静止时,弹簧测力计的示数大于1N,其原因可能是 ,此时杠杆 (选填“平衡”或“不平衡”)。当弹簧测力计从图示位置顺时针方向逐渐倾斜时,使杠杆仍然在水平位置平衡,测力计的示数将 (选填“变大”、“变小”或“不变”)。
2021-2022学年浙教版科学杠杆的平衡条件的实验探究
参考答案与试题解析
一.选择题(共3小题)
1.解:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,此时的力臂正是支点到力作用点的距离。为得出普遍结论,应改变力的方向使力臂不等于支点到力作用点的距离,多做几次实验,得出实验结论,故正确的实验操作应该是C、去掉一侧钩码,换用弹簧测力计斜向下拉。
故选:C。
2.解:设一个钩码的重是G,由图可知:F1=2G,F2=3G,此时由F1l1=F2l2可得,2Gl1=3Gl2,则2l1=3l2,可以设左边的力臂为l1=3L,右边的力臂l2=2L;
A、由图可知,左边的力臂要大于右边的力臂,分别在两边钩码下再增加一个相同钩码,左边增大G3L,右边增大G2L,则两边增大的力和力臂的乘积不相等,故杠杆不能平衡,故A错误;
B、左边减少1个钩码,则力和力臂的乘积为:G3L;右边减少2个钩码,则力和力臂的乘积为G2L,两边力臂和力的乘积不相等,不能平衡,故B错误;
C、两边钩码均向支点移动相同的距离,由于两边的力不同,则减小的力与力臂的乘积也不相同,故杠杆不能平衡;
D、左边钩码向左移1.5L,右边钩码向右移1L,左边:2G×(3L+1.5L)=9GL;右边:3G×(2L+1L)=9GL;两边力臂和力的乘积相等,杠杆能平衡,故D正确。
故选:D。
3.解:A、如图甲可知,杠杆左端下沉,则需要将平衡螺母向右调节,故A错误;
B、若在A点用弹簧测力计拉杠杆使杠杆平衡,由于没有明确力的方向,动力臂可能小于阻力臂,则此时杠杆可能是费力杠杆,故B正确;
C、左侧力与力臂的乘积3G×4L=12GL;在D点挂3个相同钩码,右侧力与力臂的乘积3G×3L=9GL,左右两侧力与力臂的乘积不相等,故杠杆不平衡,故C错误;
D、为了保持杠杆在水平位置平衡,在D点施加力的方向由①位置到②位置的过程中,阻力和阻力臂不变,动力臂减小,由杠杆平衡条件可知,动力变大,故D错误。
故选:B。
二.填空题(共3小题)
4.解:挂钩码前,杠杆在如图甲所示的位置静止,开始实验前发现左端下沉,右端上翘,可将杠杆两端的平衡螺母向右端移动,直到杠杆在水平位置平衡;
由图可知,根据杠杆平衡条件得FA×LA=FB×LB
,3×0.5N×4L=FB×3L,所以FB=2N;
故答案为:(1)右;(2)2。
5.解:(1)调节杠杆两端的平衡螺母使杠杆在水平位置平衡.杠杆在水平位置平衡,力臂在杠杆上,便于在杠杆上直接读取力臂;
(2)设一个钩码重为G,一格为L,根据杠杆平衡的条件,F1×L1=F2×L2,则有2G×2L=4G×L,即在B处挂4个钩码;
(3)当弹簧测力计在图乙所示的C位置斜向下拉时,力臂变小,即L1<4L,根据杠杆平衡条件得,2N×2L=F×L1,即F=,因为L1<4L,所以F>1N;
(4)从实验表格中可知,三次实验数据都满足:F1L1=F2L2(动力×动力臂=阻力×阻力臂).
故答案为:(1)便于在杠杆上直接读出力臂大小;(2)4;
(3)大于;(4)F1L1=F2L2(动力×动力臂=阻力×阻力臂).
6.解:(1)为了便于从杠杆上直接读取力臂,在进行实验时应该使杠杆在水平位置静止,这样做的目的是便于测量力臂;
(2)A.铁架台自身的重力足够大目的使杠杆稳定,但对杠杆的平衡无影响,故A符合题意;
B.悬挂钩码的绳套重力偏大,会对力的真实值有影响,故B不符合题意;
C.单个钩码的重力不完全相等,则多个钩码总重力无法确定,对实验结果有影响,故C不符合题意;
D.杠杆与转轴之间的摩擦偏大会影响杠杆的灵敏,对测量结果造成误差,故D不符合题意,
E、在水平位置平衡,消除杠杆自身重力的影响,对测量结果不会造成误差,故E符合题意。
故选AE。
故答案为:(1)便于测量力臂;(2)AE。
三.实验探究题(共4小题)
7.解:(2)设每个钩码重G,每个小格长为L,
实验1:2G×3L=3G×2L,
实验2:G×6L=3G×2L,
实验3:2G×6L=3G×4L,
杠杆平衡调节:F1l1=F2l2。
(3)杠杆左端:G×3L=3GL,
杠杆右端:2G×2L=4GL,
所以杠杆的左端下沉,
要使杠杆水平位置平衡,2G×2L=G×nL,所以n=4(格),
使杠杆恢复水平平衡的最简单操作是左侧钩码向左移动一个小格。
(4)根据杠杆的平衡条件可得E点弹簧测力计示数:
F×5L=5G×2L,
解得:F=2G=2×mg=2×0.05kg×10N/kg=1N。
故答案为:(2)F1l1=F2l2;(3)左侧钩码向左移动一个小格;(4)1。
8.解:(1)实验过程中应将杠杆调节到
水平位置平衡,这样做是为了消除杠杆自重对实验的影响和便于
测量力臂。
(2)设一钩码重为G,一格为L,根据杠杆平衡条件可知:3G×4L=FB×3L,所以FB=4G,需在B点挂4个钩码;
(3)根据杠杆的平衡条件:FALA=FBLB,若A、B两点的钩码同时向远离支点的方向移动一个格,则左侧3G×5L=15GL,右侧4G×4L=16GL,因为15GL<16GL,所以杠杆右端会下沉;
(4)用弹簧测力计在C处由竖直向上拉动改为逐渐倾斜时,仍然使杠杆在水平位置平衡时,动力臂变小,阻力、阻力臂不变,根据杠杆平衡条件可知,动力将变大,即弹簧测力计示数将变大。
故答案为:(1)水平;测量力臂;(2)4;(3)右;(4)变大。
9解:(1)调节杠杆在水平位置平衡,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响。
杠杆右端偏高,右端的平衡螺母应向上翘的右端移动。
如图(b)所示的状态,左高右低,可以将右端钩码的位置向左移;
(2)两同学用弹簧测力计与钩码探究杠杆的平衡条件,如图丙、丁所示,都得到F1?0A<F2?OB,并由此得出结论:动力×动力臂<阻力×阻力臂。则丙的原因是把OB当作F2的力臂;丁的原因是弹簧测力计本身有重力;
(3)得出“动力+动力臂=阻力+阻力臂”的结论是错误的,因为数据具有偶然性,不能得出普遍规律,单位不同的物理量不能相加。
(4)A图与D图动力臂与阻力臂相同,A图在物体下滑时更安全,从杠杆的平衡条件及施工量等因素考虑,A
相当于D更好一些,所以工人师傅们应选择如图A的方案较省力。
故答案为:(1)右;
左;(2)把OB当作F2的力臂;弹簧测力计本身有重力;(3)错误;不同的物理量不能相加;(4)A。
10.解:(1)图甲中,杠杆右端下沉,为了使杠杆在水平位置平衡,应将杠杆两端的螺母向左调;
(2)杠杆调平后,在其两边分别排上不同数量的钩码并移动,仍使杠杆在水平位置平衡,力臂正好在杠杆上,故其目的是为了便于测量力臂;
(3)如图乙所示,杠杆在水平位置平衡,将左右两点的钩码同时向远离支点的方向移动一个格,则左侧3G×3L=9GL,右侧2G×4L=8GL,因为9GL>8GL,杠杆不能平衡,左端将下沉;
(4)利用如图丙所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响,弹簧测力计的示数大于1N,杠杆在水平位置静止处于平衡;
当弹簧测力计倾斜拉动杠杆时,拉力的力臂减小,为保持杠杆平衡,拉力要增大,所以弹簧测力计示数会变大。
故答案为:(1)左;(2)便于测量力臂;(3)左;(4)杠杆的自重影响了杠杆平衡条件的探究;平衡;变大。
一.选择题(共3小题)
1.小明小组利用如图所示装置探究“杠杆平衡条件”时,在杠杆两侧挂上不同个数的钩码,移动钩码使杠杆在水平位置平衡,这样三次实验后得出结论:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。下列能帮助他得出正确结论的操作是( )
A.去掉一侧钩码,换用弹簧测力计竖直向下拉
B.去掉一侧钩码,换用弹簧测力计竖直向上拉
C.去掉一侧钩码,换用弹簧测力计斜向下拉
D.增加钩码个数,再多次实验使结论更具普遍性
2.如图所示,在探究杠杆平衡条件的实验中,杠杆处于水平平衡状态,所用钩码完全相同。下列做法中能使杠杆再次平衡的是( )
A.分别在两边钩码下再增加一个相同钩码
B.左边减少1个钩码,右边减少2个钩码
C.两边钩码均向支点移动相同的距离
D.左边钩码向左移1.5个格,右边钩码向右移1个格
3.如图所示是小兰同学探究“杠杆平衡条件”的实验装置和操作图,关于此实验下列说法正确的是( )
A.若实验前杠杆如图甲所示,则需要将杠杆的平衡螺母向左调节
B.若在乙图中的A点用弹簧测力计拉杠杆使杠杆平衡,则此时杠杆可能是费力杠杆
C.小兰的其中一步实验如图乙所示,则需要在D点挂3个相同的钩码,就可以让杠杆恢复平衡
D.为了保持杠杆在水平位置平衡,在D点施加力的方向由①位置到②位置的过程中,所需施加的拉力大小不变
二.填空题(共3小题)
4.在“探究杠杆的平衡条件”实验中,实验前杠杆静止时的位置如图(甲)所示,应将杠杆的平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡。在A点悬挂3个质量均为50g的钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置重新平衡,如图(乙)所示,弹簧测力计的拉力是 N.(g取10N/kg)
5.小明在探究“杠杆的平衡条件”实验中,
(1)实验前他应先调节杠杆在水平位置平衡,其目的是 .
(2)杠杆平衡后,小明在图甲所示的A位置挂上两个钩码,可在B位置挂上 个钩码,使杠杆在水平位置平衡.
(3)他改用弹簧测力计在图乙所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将 (选填“大于”、“等于”或“小于”)1N.
(4)图表为实验数据,根据数据他得出的杠杆平衡条件是: .
第1次
第2次
第3次
L1/m
0.1
0.15
0.2
F1/N
0.5
0.5
1.5
L2/m
0.05
0.05
0.1
F2/N
1
1.5
3
6.在“探究杠杆的平衡条件”实验中,每个钩码重力相等,杠杆刻度均匀。
(1)平衡时,应该让杠杆静止在水平位置的目的是 。
(2)下列四个因素中,不会带来实验误差的是 ;
A.铁架台自身的重力足够大
B.悬挂钩码的绳套重力偏大
C.单个钩码的重力不完全相等
D.杠杆与转轴之间的摩擦偏大E.杠杆自身的重力
三.实验探究题(共4小题)
7.如图是小明“探究杠杆平衡条件”的实验:
(1)在水平静止的杠杆上A、B处,挂5个质量均为50g的钩码,如图甲所示,杠杆平衡。他猜想杠杆的平衡条件是:动力×动力臂=阻力×阻力臂;
(2)改变钩码数量与位置,数据记录如下表,分析表中数据,杠杆平衡条件应为 。
实验次数
左侧钩码数(个)
左侧钩码距离支点O(格)
右侧钩码数(个)
右侧钩码距离支点O(格)
1
2
3
3
2
2
1
6
3
2
3
2
6
3
4
(3)某次实验如图乙,使杠杆恢复水平平衡的最简单操作是 。
(4)图丙是小明验证结论的实验,E点弹簧测力计示数是 N(g取10N/kg)。
8.小明利用如图所示的装置来探究“杠杆的平衡条件”。
(1)实验过程中应将杠杆调节到 位置平衡,这样做是为了消除杠杆自重对实验的影响和便于 。
(2)杠杆平衡后,在A点挂3个相同的钩码,再在B点挂 个相同的钩码,就可使杠杆重新在水平位置平衡。
(3)在(2)杠杆平衡的基础上,将A、B两点下方所挂的钩码同时朝远离支点O的方向各移动一小格,则杠杆的 (选填“左”或“右”)端将下沉。
(4)若用弹簧测力计在C处由竖直向上拉动改为逐渐倾斜时,为使杠杆仍在水平位置平衡,则弹簧测力计示数将 (选填“变大”“变小”或“不变”)。
9.在“研究杠杆的平衡条件”实验中:
(1)实验前,发现杠杆处于如图甲所示的状态,则应将杠杆右端的平衡螺母向 移动,使杠杆在水平位置平衡,左右两端添加钩码后,杠杆的状态如图乙所示,可以将右端钩码的位置向 移动,使杠杆在水平位置重新平衡(均选填“左”或“右”)。
(2)两同学用弹簧测力计与钩码探究杠杆的平衡条件,如图丙、丁所示,都得到F1?0A<F2?OB,并由此得出结论:动力×动力臂<阻力×阻力臂。则丙的原因是 ,丁的原因是 。
(3)另一小组的同学获得的数据如下表所示:
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
4
5
5
4
3
4
4
3
他们得出的结论是:“动力+动力臂=阻力+阻力臂“你认为这个结论 (选填“正确”或“错误”),理由是 。
(4)从杠杆的平衡条件及施工量等因素考虑,工人师傅们应选择如图所示的方案 进行施工会更合适。
10.小梅和小红在做探究杠杆平衡条件的实验,已知每个钩码重0.5N:
(1)实验前,杠杆的位置如图甲所示,应将两端的平衡螺母向 移动,使杠杆在水平位置平衡;
(2)杠杆调平后,在其两边分别排上不同数量的钩码并移动,仍使杠杆在水平位置平衡,目的是 ;
(3)如图乙所示,杠杆在水平位置平衡,小梅将两侧的钩码都向外移动一格。则杠杆的
(选填“左”或“右”)端将下沉;
(4)小红用图丙所示的装置进行实验探究,发现杠杆在水平位置静止时,弹簧测力计的示数大于1N,其原因可能是 ,此时杠杆 (选填“平衡”或“不平衡”)。当弹簧测力计从图示位置顺时针方向逐渐倾斜时,使杠杆仍然在水平位置平衡,测力计的示数将 (选填“变大”、“变小”或“不变”)。
2021-2022学年浙教版科学杠杆的平衡条件的实验探究
参考答案与试题解析
一.选择题(共3小题)
1.解:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,此时的力臂正是支点到力作用点的距离。为得出普遍结论,应改变力的方向使力臂不等于支点到力作用点的距离,多做几次实验,得出实验结论,故正确的实验操作应该是C、去掉一侧钩码,换用弹簧测力计斜向下拉。
故选:C。
2.解:设一个钩码的重是G,由图可知:F1=2G,F2=3G,此时由F1l1=F2l2可得,2Gl1=3Gl2,则2l1=3l2,可以设左边的力臂为l1=3L,右边的力臂l2=2L;
A、由图可知,左边的力臂要大于右边的力臂,分别在两边钩码下再增加一个相同钩码,左边增大G3L,右边增大G2L,则两边增大的力和力臂的乘积不相等,故杠杆不能平衡,故A错误;
B、左边减少1个钩码,则力和力臂的乘积为:G3L;右边减少2个钩码,则力和力臂的乘积为G2L,两边力臂和力的乘积不相等,不能平衡,故B错误;
C、两边钩码均向支点移动相同的距离,由于两边的力不同,则减小的力与力臂的乘积也不相同,故杠杆不能平衡;
D、左边钩码向左移1.5L,右边钩码向右移1L,左边:2G×(3L+1.5L)=9GL;右边:3G×(2L+1L)=9GL;两边力臂和力的乘积相等,杠杆能平衡,故D正确。
故选:D。
3.解:A、如图甲可知,杠杆左端下沉,则需要将平衡螺母向右调节,故A错误;
B、若在A点用弹簧测力计拉杠杆使杠杆平衡,由于没有明确力的方向,动力臂可能小于阻力臂,则此时杠杆可能是费力杠杆,故B正确;
C、左侧力与力臂的乘积3G×4L=12GL;在D点挂3个相同钩码,右侧力与力臂的乘积3G×3L=9GL,左右两侧力与力臂的乘积不相等,故杠杆不平衡,故C错误;
D、为了保持杠杆在水平位置平衡,在D点施加力的方向由①位置到②位置的过程中,阻力和阻力臂不变,动力臂减小,由杠杆平衡条件可知,动力变大,故D错误。
故选:B。
二.填空题(共3小题)
4.解:挂钩码前,杠杆在如图甲所示的位置静止,开始实验前发现左端下沉,右端上翘,可将杠杆两端的平衡螺母向右端移动,直到杠杆在水平位置平衡;
由图可知,根据杠杆平衡条件得FA×LA=FB×LB
,3×0.5N×4L=FB×3L,所以FB=2N;
故答案为:(1)右;(2)2。
5.解:(1)调节杠杆两端的平衡螺母使杠杆在水平位置平衡.杠杆在水平位置平衡,力臂在杠杆上,便于在杠杆上直接读取力臂;
(2)设一个钩码重为G,一格为L,根据杠杆平衡的条件,F1×L1=F2×L2,则有2G×2L=4G×L,即在B处挂4个钩码;
(3)当弹簧测力计在图乙所示的C位置斜向下拉时,力臂变小,即L1<4L,根据杠杆平衡条件得,2N×2L=F×L1,即F=,因为L1<4L,所以F>1N;
(4)从实验表格中可知,三次实验数据都满足:F1L1=F2L2(动力×动力臂=阻力×阻力臂).
故答案为:(1)便于在杠杆上直接读出力臂大小;(2)4;
(3)大于;(4)F1L1=F2L2(动力×动力臂=阻力×阻力臂).
6.解:(1)为了便于从杠杆上直接读取力臂,在进行实验时应该使杠杆在水平位置静止,这样做的目的是便于测量力臂;
(2)A.铁架台自身的重力足够大目的使杠杆稳定,但对杠杆的平衡无影响,故A符合题意;
B.悬挂钩码的绳套重力偏大,会对力的真实值有影响,故B不符合题意;
C.单个钩码的重力不完全相等,则多个钩码总重力无法确定,对实验结果有影响,故C不符合题意;
D.杠杆与转轴之间的摩擦偏大会影响杠杆的灵敏,对测量结果造成误差,故D不符合题意,
E、在水平位置平衡,消除杠杆自身重力的影响,对测量结果不会造成误差,故E符合题意。
故选AE。
故答案为:(1)便于测量力臂;(2)AE。
三.实验探究题(共4小题)
7.解:(2)设每个钩码重G,每个小格长为L,
实验1:2G×3L=3G×2L,
实验2:G×6L=3G×2L,
实验3:2G×6L=3G×4L,
杠杆平衡调节:F1l1=F2l2。
(3)杠杆左端:G×3L=3GL,
杠杆右端:2G×2L=4GL,
所以杠杆的左端下沉,
要使杠杆水平位置平衡,2G×2L=G×nL,所以n=4(格),
使杠杆恢复水平平衡的最简单操作是左侧钩码向左移动一个小格。
(4)根据杠杆的平衡条件可得E点弹簧测力计示数:
F×5L=5G×2L,
解得:F=2G=2×mg=2×0.05kg×10N/kg=1N。
故答案为:(2)F1l1=F2l2;(3)左侧钩码向左移动一个小格;(4)1。
8.解:(1)实验过程中应将杠杆调节到
水平位置平衡,这样做是为了消除杠杆自重对实验的影响和便于
测量力臂。
(2)设一钩码重为G,一格为L,根据杠杆平衡条件可知:3G×4L=FB×3L,所以FB=4G,需在B点挂4个钩码;
(3)根据杠杆的平衡条件:FALA=FBLB,若A、B两点的钩码同时向远离支点的方向移动一个格,则左侧3G×5L=15GL,右侧4G×4L=16GL,因为15GL<16GL,所以杠杆右端会下沉;
(4)用弹簧测力计在C处由竖直向上拉动改为逐渐倾斜时,仍然使杠杆在水平位置平衡时,动力臂变小,阻力、阻力臂不变,根据杠杆平衡条件可知,动力将变大,即弹簧测力计示数将变大。
故答案为:(1)水平;测量力臂;(2)4;(3)右;(4)变大。
9解:(1)调节杠杆在水平位置平衡,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响。
杠杆右端偏高,右端的平衡螺母应向上翘的右端移动。
如图(b)所示的状态,左高右低,可以将右端钩码的位置向左移;
(2)两同学用弹簧测力计与钩码探究杠杆的平衡条件,如图丙、丁所示,都得到F1?0A<F2?OB,并由此得出结论:动力×动力臂<阻力×阻力臂。则丙的原因是把OB当作F2的力臂;丁的原因是弹簧测力计本身有重力;
(3)得出“动力+动力臂=阻力+阻力臂”的结论是错误的,因为数据具有偶然性,不能得出普遍规律,单位不同的物理量不能相加。
(4)A图与D图动力臂与阻力臂相同,A图在物体下滑时更安全,从杠杆的平衡条件及施工量等因素考虑,A
相当于D更好一些,所以工人师傅们应选择如图A的方案较省力。
故答案为:(1)右;
左;(2)把OB当作F2的力臂;弹簧测力计本身有重力;(3)错误;不同的物理量不能相加;(4)A。
10.解:(1)图甲中,杠杆右端下沉,为了使杠杆在水平位置平衡,应将杠杆两端的螺母向左调;
(2)杠杆调平后,在其两边分别排上不同数量的钩码并移动,仍使杠杆在水平位置平衡,力臂正好在杠杆上,故其目的是为了便于测量力臂;
(3)如图乙所示,杠杆在水平位置平衡,将左右两点的钩码同时向远离支点的方向移动一个格,则左侧3G×3L=9GL,右侧2G×4L=8GL,因为9GL>8GL,杠杆不能平衡,左端将下沉;
(4)利用如图丙所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响,弹簧测力计的示数大于1N,杠杆在水平位置静止处于平衡;
当弹簧测力计倾斜拉动杠杆时,拉力的力臂减小,为保持杠杆平衡,拉力要增大,所以弹簧测力计示数会变大。
故答案为:(1)左;(2)便于测量力臂;(3)左;(4)杠杆的自重影响了杠杆平衡条件的探究;平衡;变大。
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿