高中物理鲁科版必修第一册课件:第4章 力与平衡 章末总结(29张PPT)
文档属性
| 名称 | 高中物理鲁科版必修第一册课件:第4章 力与平衡 章末总结(29张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 12.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 鲁科版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-10-26 00:00:00 | ||
图片预览

文档简介
(共29张PPT)
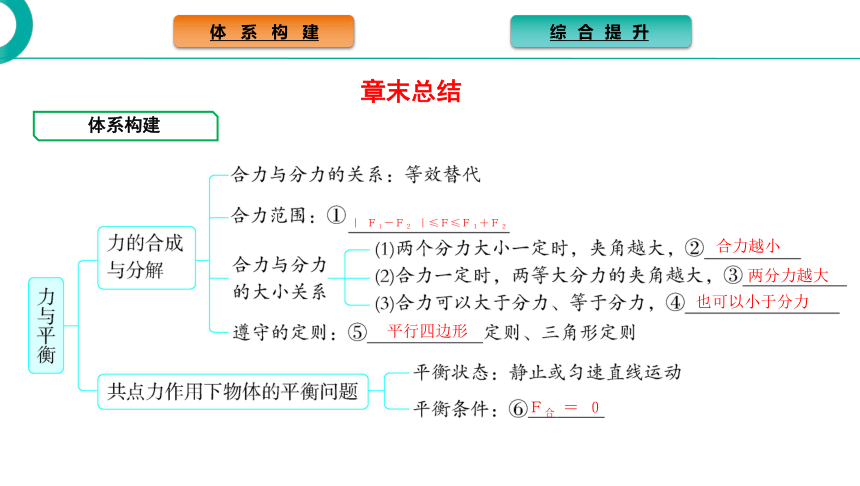
体系构建
章末总结
| F1-F2 |≤F≤F1+F2
合力越小
两分力越大
也可以小于分力
平行四边形
F合 = 0
综合提升
提升一 单个物体平衡问题
例1 近年来,智能手机的普及使“低头族”应运而生,当人体直立时,颈椎所
承受的压力等于头部的重力;低头时,颈椎受到的压力会增大,现将人低头时
头颈部简化为如图所示的模型:重心在头部的P点,颈椎OP(轻杆)可绕O转动,
人的头部在颈椎的支持力和沿PA方向肌肉拉力的作用下处于静止状态,假设
低头时颈椎OP与竖直方向的夹角为45°,PA与竖直方向的夹角为60°,此时颈
椎受到的压力约为直立时颈椎受到压力的(sin 15°≈0.26) ( )
B
A.4.2倍 B.3.3倍
C.2.8倍 D.2.0倍
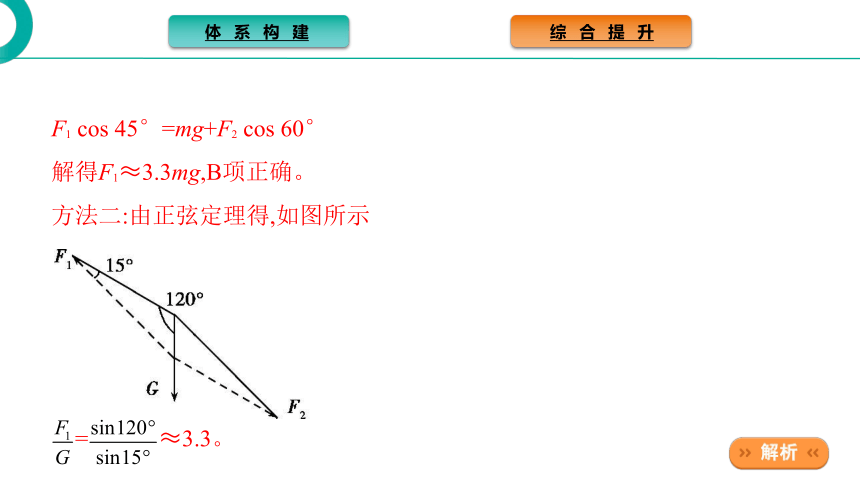
解析 方法一:正交分解法
设颈椎对头的作用力为F1,肌肉拉力为F2,如图所示:
F1 sin 45°=F2 sin 60°
F1 cos 45°=mg+F2 cos 60°
解得F1≈3.3mg,B项正确。
方法二:由正弦定理得,如图所示
= ≈3.3。
当只涉及一个物体的平衡时,研究对象唯一且确定,进行受力分析时要重点掌
握建立平衡关系的方法:
综合提升
1.合成法:适用于三力平衡问题,根据任意两个力的合力与第三个力大小相
等、方向相反,通过平行四边形定则建立平衡关系。
2.正交分解法:适用于多力平衡问题,通过两个垂直方向的合力为零,建立平衡
关系。
3.数学方法:无论是合成法还是正交分解法,都要通过数学方法建立平衡关系。
(1)当角度已知时,常用三角函数。
(2)当长度已知时,常用三角形相似或勾股定理。
(3)特殊情况下,可考虑正(余)弦定理。
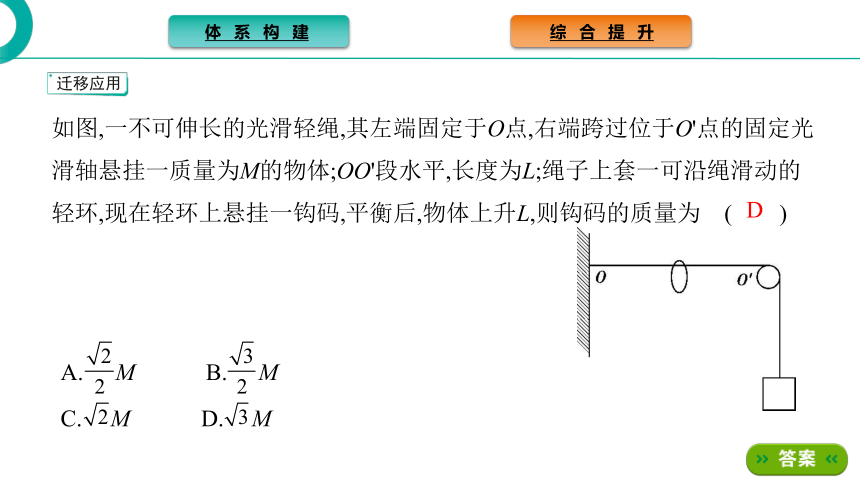
如图,一不可伸长的光滑轻绳,其左端固定于O点,右端跨过位于O'点的固定光
滑轴悬挂一质量为M的物体;OO'段水平,长度为L;绳子上套一可沿绳滑动的
轻环,现在轻环上悬挂一钩码,平衡后,物体上升L,则钩码的质量为 ( )
迁移应用
A. M B. M
C. M D. M
D
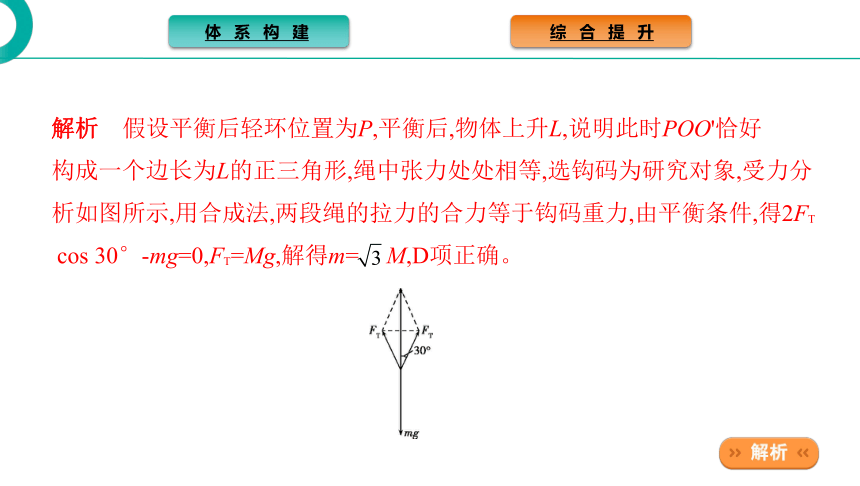
解析 假设平衡后轻环位置为P,平衡后,物体上升L,说明此时POO'恰好
构成一个边长为L的正三角形,绳中张力处处相等,选钩码为研究对象,受力分
析如图所示,用合成法,两段绳的拉力的合力等于钩码重力,由平衡条件,得2FT
cos 30°-mg=0,FT=Mg,解得m= M,D项正确。
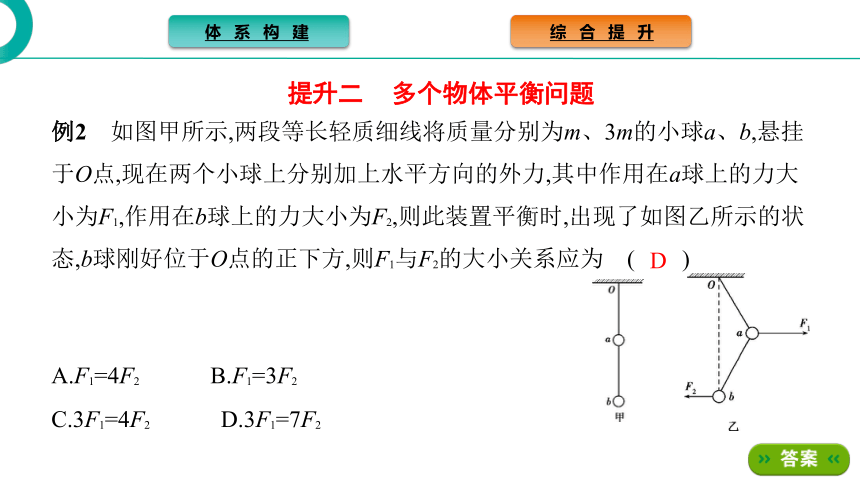
提升二 多个物体平衡问题
例2 如图甲所示,两段等长轻质细线将质量分别为m、3m的小球a、b,悬挂
于O点,现在两个小球上分别加上水平方向的外力,其中作用在a球上的力大
小为F1,作用在b球上的力大小为F2,则此装置平衡时,出现了如图乙所示的状
态,b球刚好位于O点的正下方,则F1与F2的大小关系应为 ( )
A.F1=4F2 B.F1=3F2
C.3F1=4F2 D.3F1=7F2
D
解析 设Oa绳、ab绳和竖直方向的夹角均为α,以两个小球组成的整体
为研究对象,根据平衡条件可知,F1-F2=TOa sin α,TOa·cos α=4mg;对小球b:Tab cos
α=3mg,F2=Tab sin α;由此可得 = ; = ,解得3F1=7F2,故选D项。
当涉及多个物体平衡问题时,利用整体法或隔离法,恰当选取研究对象是解题
的关键,应用整体法和隔离法的三个原则:
综合提升
1.一般先考虑整体法,再用隔离法,两种方法交替使用,联立方程组求解。
2.求解系统外力时,用整体法;求解系统内力时,用隔离法。
3.用隔离法时,要先隔离受力较少的物体进行分析。
在竖直墙壁间有质量分别是m和2m的半圆球A和圆球B,其中B球球面光滑,半
球A与左侧墙壁之间存在摩擦,两球心之间的连线与水平方向夹角为θ=30°,两
球恰好不下滑,设最大静摩擦力等于滑动摩擦力,g为重力加速度,则半球A与
左侧墙壁之间的动摩擦因数为 ( )
迁移应用
A. B.
C. D.
A
解析 隔离圆球B,对B受力分析如图所示:
可得:FN=F cos θ
2mg-F sin θ=0
解得FN=
对A、B组成的整体有
3mg-μFN=0
联立解得μ= 。
提升三 解决动态平衡问题的三种方法
例3 如图所示,小球用细绳系住放在倾角为θ的光滑斜面上,当细绳由水平方
向逐渐向上偏移时,细绳上的拉力将 ( )
A.逐渐增大
B.逐渐减小
C.先增大后减小
D.先减小后增大
D
解析 因为G、FN、FT三力平衡,故三个力可以构成一个矢量三角形,如
图所示,G的大小和方向始终不变,FN的方向不变,大小可变,FT的大小、方向
都在变,在绳向上偏移的过程中,可以作出一系列矢量三角形,显而易见在FT
变化到与FN垂直前,FT是逐渐变小的,然后FT又逐渐变大,故正确答案为D项。
解决动态平衡问题常见的三种方法
综合提升
1.图解法:适合解决三个力的动态平衡问题,形象、直观,其解题步骤:
(1)确定研究对象,受力分析。
(2)构建力的三角形。
(3)确定力的三角形中哪些要素不变,哪些要素变化。
(4)根据变化情况,在初位置到末位置之间画出变化的动态图像。
2.解析法:适合解决多力动态平衡问题,此方法将动态平衡问题转化为函数的
增减性问题,利用平衡条件列函数方程,根据函数关系式确定物理量的变化情
况。
3.相似三角形法:在三力平衡问题中,如果有一个力是恒力,另外两个力方向都
变化,无法用图解法分析,且题目给出了空间几何关系,多数情况下力的矢量
三角形与空间几何三角形相似,可利用相似三角形的比例关系求解。
(多选)半圆柱体P放在粗糙的水平地面上,其右端有一固定放置的竖直挡板
MN,在半圆柱体P和MN之间放有一个光滑均匀的小圆柱体Q,整个装置处于
平衡状态,如图所示是这个装置的截面图,现使MN保持竖直并且缓慢地向右
平移,在Q滑落到地面之前,发现P始终保持静止,则在此过程中,下列说法中正
确的是 ( )
迁移应用
BC
A.MN对Q的弹力逐渐减小
B.P对Q的弹力逐渐增大
C.地面对P的摩擦力逐渐增大
D.Q所受的合力逐渐增大
解析 圆柱体Q的受力分析如图所示,在MN缓慢地向右平移的过程中,
它对圆柱体Q的作用力F1方向不变,P对Q的作用力F2的方向与水平方向的夹
角逐渐减小,由图可知MN对Q的弹力F1逐渐增大,A项错误;P对Q的弹力F2逐
渐增大,B项正确;以P、Q为整体,地面对P的摩擦力大小等于MN对Q的弹力F
1,故地面对P的摩擦力逐渐增大,C项正确;Q所受的合力始终为零,D项错误。
提升四 平衡中的临界与极直问题
例4 如图所示,斜面的倾角θ=30°,A、B用跨过滑轮O的轻绳相连,且OA段与
斜面平行,物体A的重力GA=10 N,A与斜面间的最大静摩擦力fmax=3.46 N,为了
使A能静止在斜面上,物体B的重力GB应在什么范围内
答案 1.54 N≤GB≤8.46 N
解析 对物体A分析,当重力沿斜面向下的分力、摩擦力与拉力的合力为0
时,物体A能静止在斜面上。由于摩擦力的方向可能沿斜面向上也可能沿斜
面向下,还可能为0,所以,当摩擦力方向沿斜面向下且达最大值时,B的重力有
最大值,则GA sin 30°+fmax-GBmax=0,GBmax=5 N+3.46 N=8.46 N;当摩擦力方向沿斜
面向上且达到最大值时,B的重力有最小值,则GA sin 30°-fmax-GBmin=0,GBmin=5 N-
3.46 N=1.54 N,所以当GB在1.54~8.46 N之间时物体A都能静止在斜面上。
综合提升
1.临界问题
当某物理量变化时,会引起其他几个物理量的变化,从而使物体所处的平衡状
态“恰好出现”或“恰好不出现”,在问题的描述中常用“刚好”“刚能”
“恰好”等语言叙述。
常见临界条件的判断:
①“刚开始滑动”临界条件是:静摩擦力达到最大值。
②“两物体恰好分离”临界条件是:两物体间的压力为零。
③“刚好断开”临界条件是:绳的张力最大。
2.极值问题
平衡物体的极值问题,一般是指在力的变化过程中的最大值和最小值问题。
3.处理平衡问题中的临界、极值问题的方法
(1)解析法
根据物体的平衡条件列方程,在解方程时采用数学知识求极值。通常用到的
数学知识有二次函数求极值、三角函数求极值以及几何法求极值等。
(2)图解法
根据平衡条件作出力的矢量图,如只受三个力,则这三个力构成封闭矢量三角
形,然后根据矢量图进行动态分析,确定最大值或最小值。
迁移应用
1.如图,在固定斜面上的一质量为m的物块受到一外力F的作用,F平行于斜面
向上。若要物块在斜面上保持静止,F的取值应有一定的范围,已知其最大值
和最小值分别为F1和F2(F1和F2的方向均沿斜面向上)。由此可求出物块与斜
面间的最大静摩擦力为 ( )
A. B.2F2
C
C. D.
解析 对物块受力分析,受重力、拉力、支持力、静摩擦力,设物块受到
的最大静摩擦力为f,根据平衡条件得,当最大静摩擦力平行于斜面向下时,拉
力最大,有F1-mg sin θ-f=0;当最大静摩擦力平行于斜面向上时,拉力最小,有F2
+f-mg sin θ=0,联立解得f= ,故C项正确。
2.如图所示,半径为R、重力为G的均匀球紧靠着竖直墙放置,左下方有厚为h
(h推力F推木块才能使球离开地面。
答案
解析 球刚离开地面时,地面支持力为零,以球为研究对象,受力分析并分解
如图所示,由平衡条件得:
FN1 sin θ=G
FN1 cos θ=FN2
sin θ=
再以整体为研究对象得FN2=F
即F= =
体系构建
章末总结
| F1-F2 |≤F≤F1+F2
合力越小
两分力越大
也可以小于分力
平行四边形
F合 = 0
综合提升
提升一 单个物体平衡问题
例1 近年来,智能手机的普及使“低头族”应运而生,当人体直立时,颈椎所
承受的压力等于头部的重力;低头时,颈椎受到的压力会增大,现将人低头时
头颈部简化为如图所示的模型:重心在头部的P点,颈椎OP(轻杆)可绕O转动,
人的头部在颈椎的支持力和沿PA方向肌肉拉力的作用下处于静止状态,假设
低头时颈椎OP与竖直方向的夹角为45°,PA与竖直方向的夹角为60°,此时颈
椎受到的压力约为直立时颈椎受到压力的(sin 15°≈0.26) ( )
B
A.4.2倍 B.3.3倍
C.2.8倍 D.2.0倍
解析 方法一:正交分解法
设颈椎对头的作用力为F1,肌肉拉力为F2,如图所示:
F1 sin 45°=F2 sin 60°
F1 cos 45°=mg+F2 cos 60°
解得F1≈3.3mg,B项正确。
方法二:由正弦定理得,如图所示
= ≈3.3。
当只涉及一个物体的平衡时,研究对象唯一且确定,进行受力分析时要重点掌
握建立平衡关系的方法:
综合提升
1.合成法:适用于三力平衡问题,根据任意两个力的合力与第三个力大小相
等、方向相反,通过平行四边形定则建立平衡关系。
2.正交分解法:适用于多力平衡问题,通过两个垂直方向的合力为零,建立平衡
关系。
3.数学方法:无论是合成法还是正交分解法,都要通过数学方法建立平衡关系。
(1)当角度已知时,常用三角函数。
(2)当长度已知时,常用三角形相似或勾股定理。
(3)特殊情况下,可考虑正(余)弦定理。
如图,一不可伸长的光滑轻绳,其左端固定于O点,右端跨过位于O'点的固定光
滑轴悬挂一质量为M的物体;OO'段水平,长度为L;绳子上套一可沿绳滑动的
轻环,现在轻环上悬挂一钩码,平衡后,物体上升L,则钩码的质量为 ( )
迁移应用
A. M B. M
C. M D. M
D
解析 假设平衡后轻环位置为P,平衡后,物体上升L,说明此时POO'恰好
构成一个边长为L的正三角形,绳中张力处处相等,选钩码为研究对象,受力分
析如图所示,用合成法,两段绳的拉力的合力等于钩码重力,由平衡条件,得2FT
cos 30°-mg=0,FT=Mg,解得m= M,D项正确。
提升二 多个物体平衡问题
例2 如图甲所示,两段等长轻质细线将质量分别为m、3m的小球a、b,悬挂
于O点,现在两个小球上分别加上水平方向的外力,其中作用在a球上的力大
小为F1,作用在b球上的力大小为F2,则此装置平衡时,出现了如图乙所示的状
态,b球刚好位于O点的正下方,则F1与F2的大小关系应为 ( )
A.F1=4F2 B.F1=3F2
C.3F1=4F2 D.3F1=7F2
D
解析 设Oa绳、ab绳和竖直方向的夹角均为α,以两个小球组成的整体
为研究对象,根据平衡条件可知,F1-F2=TOa sin α,TOa·cos α=4mg;对小球b:Tab cos
α=3mg,F2=Tab sin α;由此可得 = ; = ,解得3F1=7F2,故选D项。
当涉及多个物体平衡问题时,利用整体法或隔离法,恰当选取研究对象是解题
的关键,应用整体法和隔离法的三个原则:
综合提升
1.一般先考虑整体法,再用隔离法,两种方法交替使用,联立方程组求解。
2.求解系统外力时,用整体法;求解系统内力时,用隔离法。
3.用隔离法时,要先隔离受力较少的物体进行分析。
在竖直墙壁间有质量分别是m和2m的半圆球A和圆球B,其中B球球面光滑,半
球A与左侧墙壁之间存在摩擦,两球心之间的连线与水平方向夹角为θ=30°,两
球恰好不下滑,设最大静摩擦力等于滑动摩擦力,g为重力加速度,则半球A与
左侧墙壁之间的动摩擦因数为 ( )
迁移应用
A. B.
C. D.
A
解析 隔离圆球B,对B受力分析如图所示:
可得:FN=F cos θ
2mg-F sin θ=0
解得FN=
对A、B组成的整体有
3mg-μFN=0
联立解得μ= 。
提升三 解决动态平衡问题的三种方法
例3 如图所示,小球用细绳系住放在倾角为θ的光滑斜面上,当细绳由水平方
向逐渐向上偏移时,细绳上的拉力将 ( )
A.逐渐增大
B.逐渐减小
C.先增大后减小
D.先减小后增大
D
解析 因为G、FN、FT三力平衡,故三个力可以构成一个矢量三角形,如
图所示,G的大小和方向始终不变,FN的方向不变,大小可变,FT的大小、方向
都在变,在绳向上偏移的过程中,可以作出一系列矢量三角形,显而易见在FT
变化到与FN垂直前,FT是逐渐变小的,然后FT又逐渐变大,故正确答案为D项。
解决动态平衡问题常见的三种方法
综合提升
1.图解法:适合解决三个力的动态平衡问题,形象、直观,其解题步骤:
(1)确定研究对象,受力分析。
(2)构建力的三角形。
(3)确定力的三角形中哪些要素不变,哪些要素变化。
(4)根据变化情况,在初位置到末位置之间画出变化的动态图像。
2.解析法:适合解决多力动态平衡问题,此方法将动态平衡问题转化为函数的
增减性问题,利用平衡条件列函数方程,根据函数关系式确定物理量的变化情
况。
3.相似三角形法:在三力平衡问题中,如果有一个力是恒力,另外两个力方向都
变化,无法用图解法分析,且题目给出了空间几何关系,多数情况下力的矢量
三角形与空间几何三角形相似,可利用相似三角形的比例关系求解。
(多选)半圆柱体P放在粗糙的水平地面上,其右端有一固定放置的竖直挡板
MN,在半圆柱体P和MN之间放有一个光滑均匀的小圆柱体Q,整个装置处于
平衡状态,如图所示是这个装置的截面图,现使MN保持竖直并且缓慢地向右
平移,在Q滑落到地面之前,发现P始终保持静止,则在此过程中,下列说法中正
确的是 ( )
迁移应用
BC
A.MN对Q的弹力逐渐减小
B.P对Q的弹力逐渐增大
C.地面对P的摩擦力逐渐增大
D.Q所受的合力逐渐增大
解析 圆柱体Q的受力分析如图所示,在MN缓慢地向右平移的过程中,
它对圆柱体Q的作用力F1方向不变,P对Q的作用力F2的方向与水平方向的夹
角逐渐减小,由图可知MN对Q的弹力F1逐渐增大,A项错误;P对Q的弹力F2逐
渐增大,B项正确;以P、Q为整体,地面对P的摩擦力大小等于MN对Q的弹力F
1,故地面对P的摩擦力逐渐增大,C项正确;Q所受的合力始终为零,D项错误。
提升四 平衡中的临界与极直问题
例4 如图所示,斜面的倾角θ=30°,A、B用跨过滑轮O的轻绳相连,且OA段与
斜面平行,物体A的重力GA=10 N,A与斜面间的最大静摩擦力fmax=3.46 N,为了
使A能静止在斜面上,物体B的重力GB应在什么范围内
答案 1.54 N≤GB≤8.46 N
解析 对物体A分析,当重力沿斜面向下的分力、摩擦力与拉力的合力为0
时,物体A能静止在斜面上。由于摩擦力的方向可能沿斜面向上也可能沿斜
面向下,还可能为0,所以,当摩擦力方向沿斜面向下且达最大值时,B的重力有
最大值,则GA sin 30°+fmax-GBmax=0,GBmax=5 N+3.46 N=8.46 N;当摩擦力方向沿斜
面向上且达到最大值时,B的重力有最小值,则GA sin 30°-fmax-GBmin=0,GBmin=5 N-
3.46 N=1.54 N,所以当GB在1.54~8.46 N之间时物体A都能静止在斜面上。
综合提升
1.临界问题
当某物理量变化时,会引起其他几个物理量的变化,从而使物体所处的平衡状
态“恰好出现”或“恰好不出现”,在问题的描述中常用“刚好”“刚能”
“恰好”等语言叙述。
常见临界条件的判断:
①“刚开始滑动”临界条件是:静摩擦力达到最大值。
②“两物体恰好分离”临界条件是:两物体间的压力为零。
③“刚好断开”临界条件是:绳的张力最大。
2.极值问题
平衡物体的极值问题,一般是指在力的变化过程中的最大值和最小值问题。
3.处理平衡问题中的临界、极值问题的方法
(1)解析法
根据物体的平衡条件列方程,在解方程时采用数学知识求极值。通常用到的
数学知识有二次函数求极值、三角函数求极值以及几何法求极值等。
(2)图解法
根据平衡条件作出力的矢量图,如只受三个力,则这三个力构成封闭矢量三角
形,然后根据矢量图进行动态分析,确定最大值或最小值。
迁移应用
1.如图,在固定斜面上的一质量为m的物块受到一外力F的作用,F平行于斜面
向上。若要物块在斜面上保持静止,F的取值应有一定的范围,已知其最大值
和最小值分别为F1和F2(F1和F2的方向均沿斜面向上)。由此可求出物块与斜
面间的最大静摩擦力为 ( )
A. B.2F2
C
C. D.
解析 对物块受力分析,受重力、拉力、支持力、静摩擦力,设物块受到
的最大静摩擦力为f,根据平衡条件得,当最大静摩擦力平行于斜面向下时,拉
力最大,有F1-mg sin θ-f=0;当最大静摩擦力平行于斜面向上时,拉力最小,有F2
+f-mg sin θ=0,联立解得f= ,故C项正确。
2.如图所示,半径为R、重力为G的均匀球紧靠着竖直墙放置,左下方有厚为h
(h
答案
解析 球刚离开地面时,地面支持力为零,以球为研究对象,受力分析并分解
如图所示,由平衡条件得:
FN1 sin θ=G
FN1 cos θ=FN2
sin θ=
再以整体为研究对象得FN2=F
即F= =
同课章节目录
- 绪论 撩开物理学的神秘面纱
- 一、源自然之问
- 二、探万物之秘
- 三、采科学之益
- 四、启智慧之迪
- 第1章 运动的描述
- 第1节 空间和时间
- 第2节 质点和位移
- 第3节 速度
- 第4节 加速度
- 第2章 匀变速直线运动
- 第1节 速度变化规律
- 第2节 位移变化规律
- 第3节 实验中的误差和有效数字
- 第4节 科学测量:做直线运动物体的瞬时速度
- 第5节 自由落体运动
- 第3章 相互作用
- 第1节 重力与重心
- 第2节 科学探究:弹力
- 第3节 摩擦力
- 第4章 力与平衡
- 第1节 科学探究:力的合成
- 第2节 力的分解
- 第3节 共点力的平衡
- 第5章 牛顿运动定律
- 第1节 牛顿第一运动定律
- 第2节 科学探究:加速度与力、质量的关系
- 第3节 牛顿第二运动定律
- 第4节 牛顿第三运动定律
- 第5节 超重与失重