2021-2022学年人教版八年级下册物理12.1杠杆 课件(共21张PPT)
文档属性
| 名称 | 2021-2022学年人教版八年级下册物理12.1杠杆 课件(共21张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 1.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-12-15 00:00:00 | ||
图片预览

文档简介
(共21张PPT)
简单机械——杠杆
一根硬棒在力的作用下如果能绕着固定点转动,这根硬棒就叫做杠杆
杠杆的定义:
1、满足杠杆的条件(两个):
(1)硬棒
(2)能绕某固定点转动
2、说明:
杠杆的形状可以是直的,也可以是弯曲的,但必须是硬的,即使用时不易变形。
O
O
F1
F2
O
L1
L2
支点
动力
阻力
动力臂
阻力臂
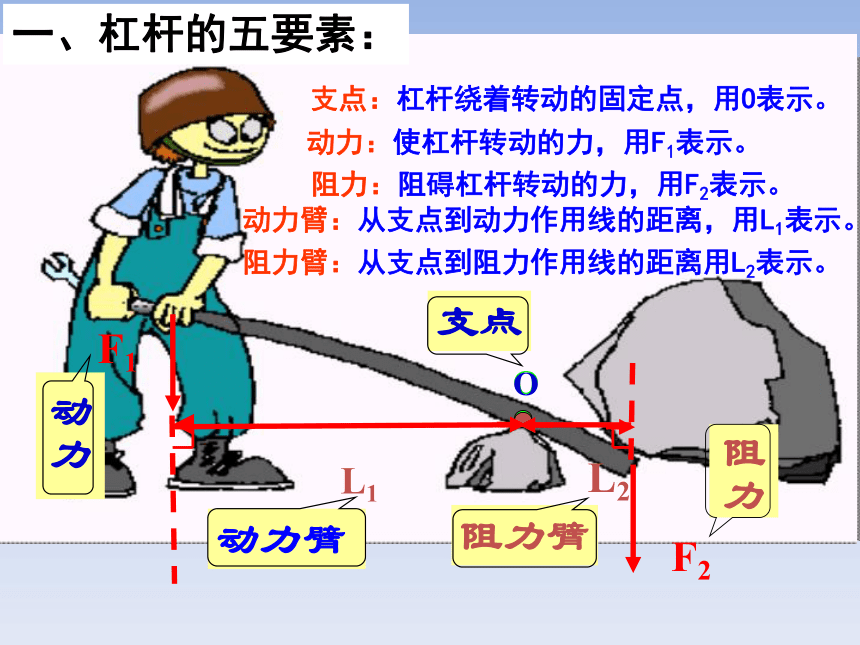
支点:杠杆绕着转动的固定点,用O表示。
动力:使杠杆转动的力,用F1表示。
动力臂:从支点到动力作用线的距离,用L1表示。
阻力:阻碍杠杆转动的力,用F2表示。
阻力臂:从支点到阻力作用线的距离用L2表示。
一、杠杆的五要素:
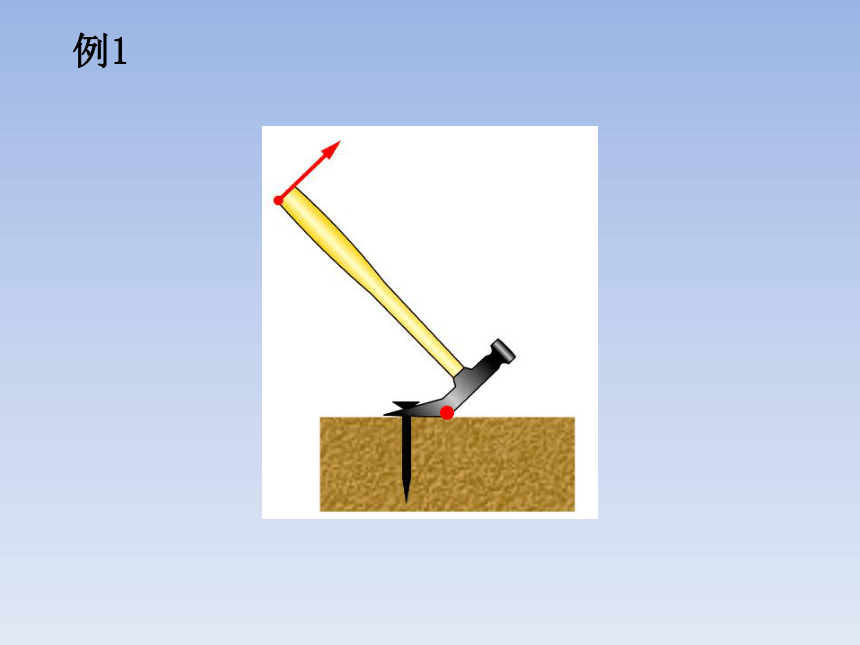
4、力臂的作法
1)找出支点O
2)沿力的方向作出力的作用线
通过力的作用点沿力的方向所引的直线,
叫做力的作用线。
3)从支点向力的作用线作垂线,并标出垂足
,并标出动力臂的长度l1、阻力臂的长度l2。
一找点、二画线、三作垂线段
例1
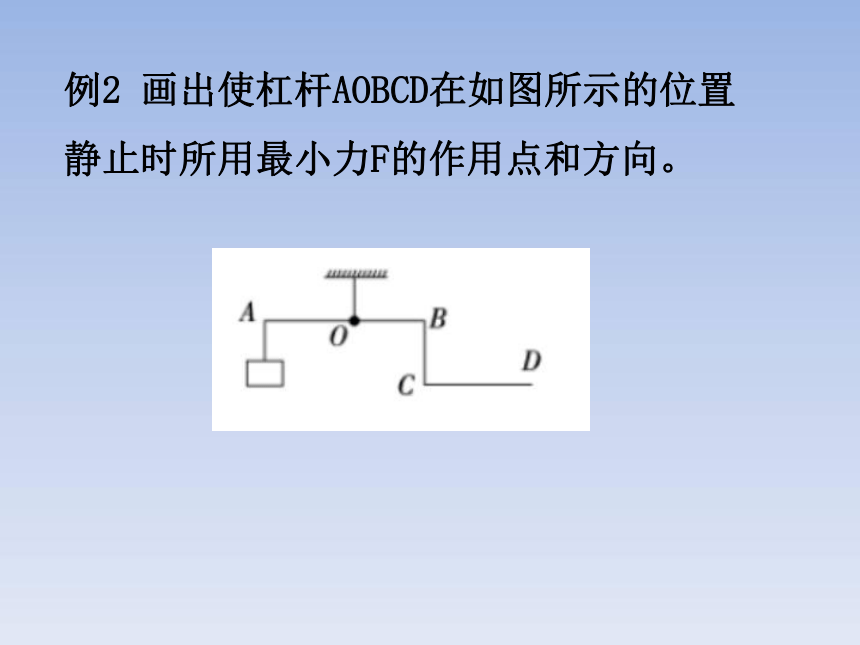
例2 画出使杠杆AOBCD在如图所示的位置
静止时所用最小力F的作用点和方向。
三、杠杆的平衡条件:
杠杆平衡时,动力×动力臂=阻力×阻力臂。
F1L1=F2L2
例2 一个已经平衡的杠杆,两端挂有40N和50N的重物,当将两边同时都增挂5N重物时,杠杆应 ( )
A.仍平衡
B.挂40N的一端下沉
C.挂50N的一端下沉
D.无法判断
B
例3 在“探究杠杆平衡条件”的实验中,下列说法不正确的是( )
A.调节平衡螺母使杠杆在水平
位置平衡是为了测量力臂
B.在没有挂钩码时杠杆如图所
示,则应将平衡螺母右调直到
杠杆在水平位置平衡
C.多次实验的目的是减小实验的误差
D.杠杆平衡时,动力x动力臂=阻力x阻力臂
C
如图所示,O为轻质杠杆AB的支点,B点挂一重物G,若在B点施加力F1或在A点分别施加力F2、F3、F4后,杠杆均保持水平位置平衡,则这四个力中最小的力是 ( )
A
A.F1
B.F2
C.F3
D.F4
有一平衡的不等臂杠杆,下列哪种情况下杠杆仍能平衡( )
A.使动力、阻力的大小减少相同的数值
B.使动力、阻力的大小增加相同的数值
C.使动力臂、阻力臂增加相同的长度
D.使动力、阻力的大小增加相同的倍数
D
1
省力杠杆
省力杠杆有哪些特点?
【杠杆的分类】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
压水井手柄等
四、杠杆的分类
2
费力杠杆
【杠杆的分类】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
笤帚
筷子
费力杠杆有哪些特点?
镊子
3
等臂杠杆
【杠杆的分类】
【特点】
动力臂等于阻力臂
动力等于阻力,
不费力不省距离
【实例】
天平等
(等量替代)
如图是一种切甘蔗用的铡刀示意图。下列有关说法正确的是( )
①刀刃很薄可以减小压强②铡刀实质上是一种省力杠杆 ③甘蔗放在a点比b点更易被切断
④手沿F1方向用力比沿F2方向更省力
A.只有②④正确
B.只有②③正确
C.只有③④正确
D.只有①②③正确
B
下列常见的六种物品:筷子、镊子、划水桨、订书机、定滑轮、斜面。在使用时,属于费力杠杆的有 ( )
D.5个
C.4个
B.3个
A.2个
B
如图所示,杠杆AOB的A端挂重为GA的物体,B端挂重为GB的物体,杠杆平衡时AO处于水平位置,若AO=BO,杠杆自重不计,则GA和GB的大小关系是( )
C
A.GA>GB
C.GAB.GA=GB
D.无法比较
探究杠杆的平衡条件。
【提出问题】
杠杆在什么条件下才能平衡呢?
【实验过程】
(1)实验前,杠杆处于如图甲所示的状态。实验时,首先应向 (选填“左”或“右”)调节平衡螺母,使杠杆在水平位置平衡。
左
(2)在杠杆两端加钩码时,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂。多次实验并把数据记录在表格中。(每个钩码重为0.5N,每小格间的距离是5cm)。
次数 F1/N L1/cm F2/N L2/cm
1 1 10 2 5
2 2 10 1 20
3 2 15 3 10
【实验结论】
根据以上数据得出杠杆平衡的条件是: .
动力×动力臂=阻力×阻力臂
【拓展】
如图丙所示,要使杠杆在水平位置平衡,可在B处挂个钩码。如果在C点用弹簧测力计沿位置1的方向向上拉(图中未画出),使杠杆在水平位置平衡,弹簧测力计的示数为______N;当弹簧测力计由位置1转至位置2的过程中,杠杆在水平位置始终保持平衡,测力计示数将 (选填“变大”“变小”或“不变”)。
3
变大
简单机械——杠杆
一根硬棒在力的作用下如果能绕着固定点转动,这根硬棒就叫做杠杆
杠杆的定义:
1、满足杠杆的条件(两个):
(1)硬棒
(2)能绕某固定点转动
2、说明:
杠杆的形状可以是直的,也可以是弯曲的,但必须是硬的,即使用时不易变形。
O
O
F1
F2
O
L1
L2
支点
动力
阻力
动力臂
阻力臂
支点:杠杆绕着转动的固定点,用O表示。
动力:使杠杆转动的力,用F1表示。
动力臂:从支点到动力作用线的距离,用L1表示。
阻力:阻碍杠杆转动的力,用F2表示。
阻力臂:从支点到阻力作用线的距离用L2表示。
一、杠杆的五要素:
4、力臂的作法
1)找出支点O
2)沿力的方向作出力的作用线
通过力的作用点沿力的方向所引的直线,
叫做力的作用线。
3)从支点向力的作用线作垂线,并标出垂足
,并标出动力臂的长度l1、阻力臂的长度l2。
一找点、二画线、三作垂线段
例1
例2 画出使杠杆AOBCD在如图所示的位置
静止时所用最小力F的作用点和方向。
三、杠杆的平衡条件:
杠杆平衡时,动力×动力臂=阻力×阻力臂。
F1L1=F2L2
例2 一个已经平衡的杠杆,两端挂有40N和50N的重物,当将两边同时都增挂5N重物时,杠杆应 ( )
A.仍平衡
B.挂40N的一端下沉
C.挂50N的一端下沉
D.无法判断
B
例3 在“探究杠杆平衡条件”的实验中,下列说法不正确的是( )
A.调节平衡螺母使杠杆在水平
位置平衡是为了测量力臂
B.在没有挂钩码时杠杆如图所
示,则应将平衡螺母右调直到
杠杆在水平位置平衡
C.多次实验的目的是减小实验的误差
D.杠杆平衡时,动力x动力臂=阻力x阻力臂
C
如图所示,O为轻质杠杆AB的支点,B点挂一重物G,若在B点施加力F1或在A点分别施加力F2、F3、F4后,杠杆均保持水平位置平衡,则这四个力中最小的力是 ( )
A
A.F1
B.F2
C.F3
D.F4
有一平衡的不等臂杠杆,下列哪种情况下杠杆仍能平衡( )
A.使动力、阻力的大小减少相同的数值
B.使动力、阻力的大小增加相同的数值
C.使动力臂、阻力臂增加相同的长度
D.使动力、阻力的大小增加相同的倍数
D
1
省力杠杆
省力杠杆有哪些特点?
【杠杆的分类】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
压水井手柄等
四、杠杆的分类
2
费力杠杆
【杠杆的分类】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
笤帚
筷子
费力杠杆有哪些特点?
镊子
3
等臂杠杆
【杠杆的分类】
【特点】
动力臂等于阻力臂
动力等于阻力,
不费力不省距离
【实例】
天平等
(等量替代)
如图是一种切甘蔗用的铡刀示意图。下列有关说法正确的是( )
①刀刃很薄可以减小压强②铡刀实质上是一种省力杠杆 ③甘蔗放在a点比b点更易被切断
④手沿F1方向用力比沿F2方向更省力
A.只有②④正确
B.只有②③正确
C.只有③④正确
D.只有①②③正确
B
下列常见的六种物品:筷子、镊子、划水桨、订书机、定滑轮、斜面。在使用时,属于费力杠杆的有 ( )
D.5个
C.4个
B.3个
A.2个
B
如图所示,杠杆AOB的A端挂重为GA的物体,B端挂重为GB的物体,杠杆平衡时AO处于水平位置,若AO=BO,杠杆自重不计,则GA和GB的大小关系是( )
C
A.GA>GB
C.GA
D.无法比较
探究杠杆的平衡条件。
【提出问题】
杠杆在什么条件下才能平衡呢?
【实验过程】
(1)实验前,杠杆处于如图甲所示的状态。实验时,首先应向 (选填“左”或“右”)调节平衡螺母,使杠杆在水平位置平衡。
左
(2)在杠杆两端加钩码时,并移动钩码,使杠杆在水平位置平衡,如图乙所示,并测出力臂。多次实验并把数据记录在表格中。(每个钩码重为0.5N,每小格间的距离是5cm)。
次数 F1/N L1/cm F2/N L2/cm
1 1 10 2 5
2 2 10 1 20
3 2 15 3 10
【实验结论】
根据以上数据得出杠杆平衡的条件是: .
动力×动力臂=阻力×阻力臂
【拓展】
如图丙所示,要使杠杆在水平位置平衡,可在B处挂个钩码。如果在C点用弹簧测力计沿位置1的方向向上拉(图中未画出),使杠杆在水平位置平衡,弹簧测力计的示数为______N;当弹簧测力计由位置1转至位置2的过程中,杠杆在水平位置始终保持平衡,测力计示数将 (选填“变大”“变小”或“不变”)。
3
变大