第十章 机械与人测试题 2021-2022学年沪科版八年级物理全一册(Word版含答案)
文档属性
| 名称 | 第十章 机械与人测试题 2021-2022学年沪科版八年级物理全一册(Word版含答案) | 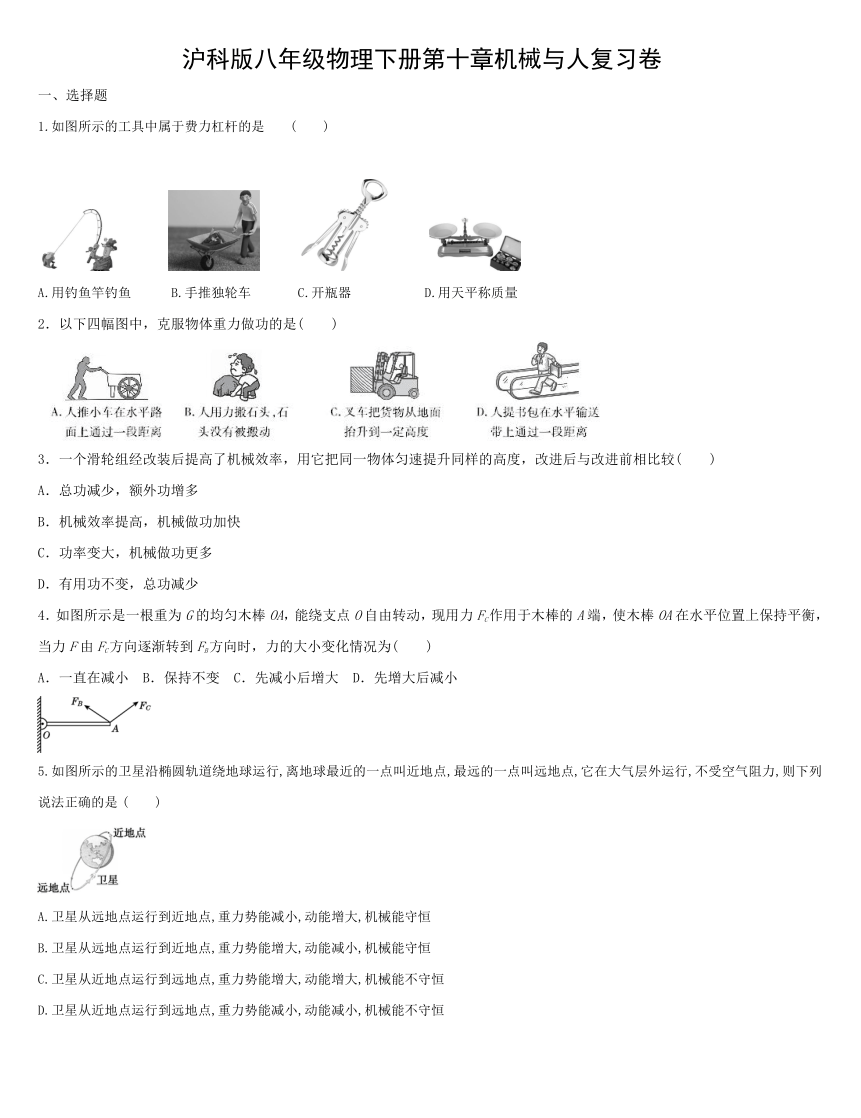 | |
| 格式 | doc | ||
| 文件大小 | 444.6KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-01-03 05:33:18 | ||
图片预览
文档简介
沪科版八年级物理下册第十章机械与人复习卷
一、选择题
1.如图所示的工具中属于费力杠杆的是 ( )
A.用钓鱼竿钓鱼 B.手推独轮车 C.开瓶器 D.用天平称质量
2.以下四幅图中,克服物体重力做功的是( )
3.一个滑轮组经改装后提高了机械效率,用它把同一物体匀速提升同样的高度,改进后与改进前相比较( )
A.总功减少,额外功增多
B.机械效率提高,机械做功加快
C.功率变大,机械做功更多
D.有用功不变,总功减少
4.如图所示是一根重为G的均匀木棒OA,能绕支点O自由转动,现用力FC作用于木棒的A端,使木棒OA在水平位置上保持平衡,当力F由FC方向逐渐转到FB方向时,力的大小变化情况为( )
A.一直在减小 B.保持不变 C.先减小后增大 D.先增大后减小
5.如图所示的卫星沿椭圆轨道绕地球运行,离地球最近的一点叫近地点,最远的一点叫远地点,它在大气层外运行,不受空气阻力,则下列说法正确的是 ( )
A.卫星从远地点运行到近地点,重力势能减小,动能增大,机械能守恒
B.卫星从远地点运行到近地点,重力势能增大,动能减小,机械能守恒
C.卫星从近地点运行到远地点,重力势能增大,动能增大,机械能不守恒
D.卫星从近地点运行到远地点,重力势能减小,动能减小,机械能不守恒
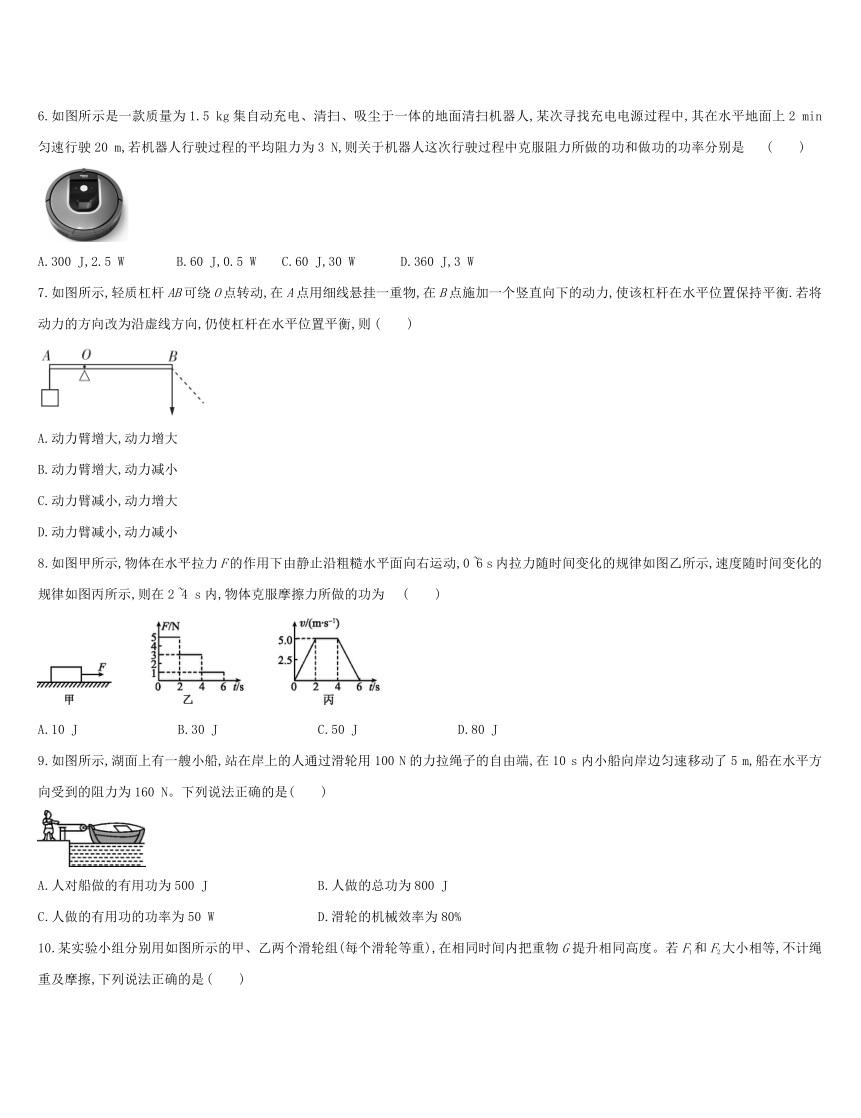
6.如图所示是一款质量为1.5 kg集自动充电、清扫、吸尘于一体的地面清扫机器人,某次寻找充电电源过程中,其在水平地面上2 min匀速行驶20 m,若机器人行驶过程的平均阻力为3 N,则关于机器人这次行驶过程中克服阻力所做的功和做功的功率分别是 ( )
A.300 J,2.5 W B.60 J,0.5 W C.60 J,30 W D.360 J,3 W
7.如图所示,轻质杠杆AB可绕O点转动,在A点用细线悬挂一重物,在B点施加一个竖直向下的动力,使该杠杆在水平位置保持平衡.若将动力的方向改为沿虚线方向,仍使杠杆在水平位置平衡,则 ( )
A.动力臂增大,动力增大
B.动力臂增大,动力减小
C.动力臂减小,动力增大
D.动力臂减小,动力减小
8.如图甲所示,物体在水平拉力F的作用下由静止沿粗糙水平面向右运动,0~6 s内拉力随时间变化的规律如图乙所示,速度随时间变化的规律如图丙所示,则在2~4 s内,物体克服摩擦力所做的功为 ( )
A.10 J B.30 J C.50 J D.80 J
9.如图所示,湖面上有一艘小船,站在岸上的人通过滑轮用100 N的力拉绳子的自由端,在10 s内小船向岸边匀速移动了5 m,船在水平方向受到的阻力为160 N。下列说法正确的是( )
A.人对船做的有用功为500 J B.人做的总功为800 J
C.人做的有用功的功率为50 W D.滑轮的机械效率为80%
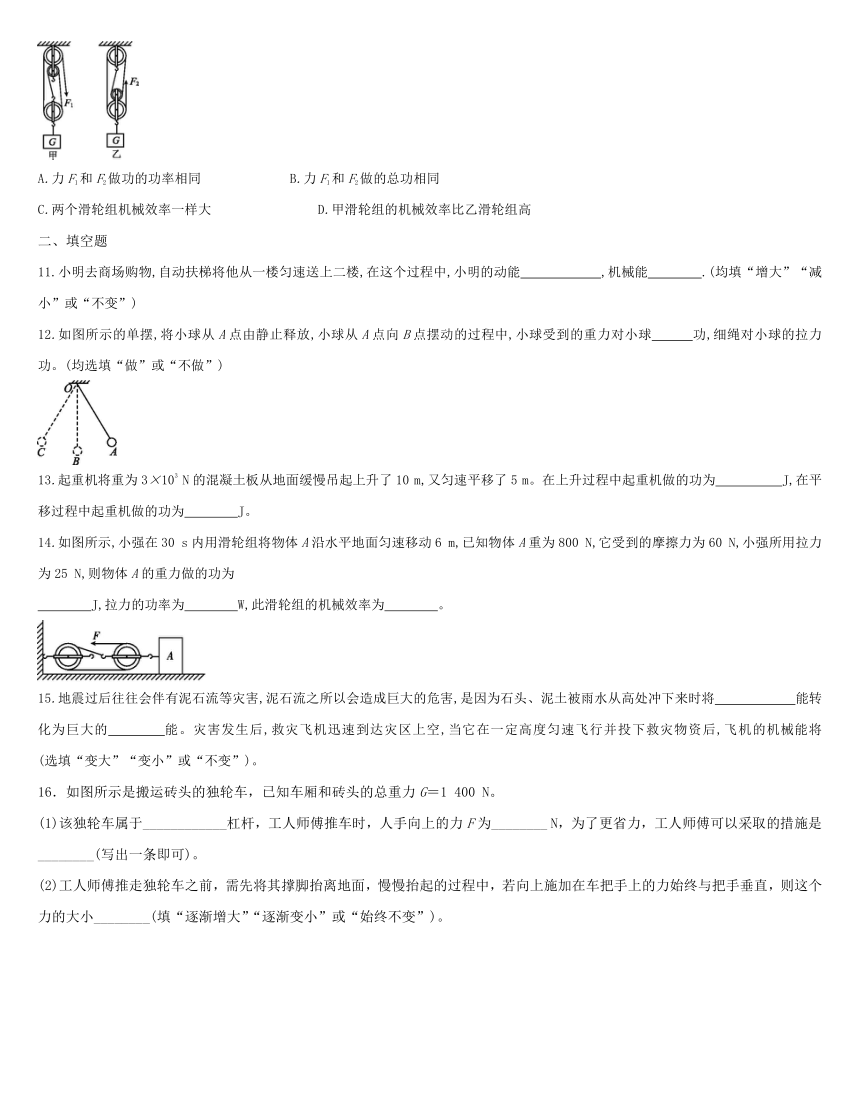
10.某实验小组分别用如图所示的甲、乙两个滑轮组(每个滑轮等重),在相同时间内把重物G提升相同高度。若F1和F2大小相等,不计绳重及摩擦,下列说法正确的是 ( )
A.力F1和F2做功的功率相同 B.力F1和F2做的总功相同
C.两个滑轮组机械效率一样大 D.甲滑轮组的机械效率比乙滑轮组高
二、填空题
11.小明去商场购物,自动扶梯将他从一楼匀速送上二楼,在这个过程中,小明的动能 ,机械能 .(均填“增大”“减小”或“不变”)
12.如图所示的单摆,将小球从A点由静止释放,小球从A点向B点摆动的过程中,小球受到的重力对小球 功,细绳对小球的拉力 功。(均选填“做”或“不做”)
13.起重机将重为3×103 N的混凝土板从地面缓慢吊起上升了10 m,又匀速平移了5 m。在上升过程中起重机做的功为 J,在平移过程中起重机做的功为 J。
14.如图所示,小强在30 s内用滑轮组将物体A沿水平地面匀速移动6 m,已知物体A重为800 N,它受到的摩擦力为60 N,小强所用拉力为25 N,则物体A的重力做的功为
J,拉力的功率为 W,此滑轮组的机械效率为 。
15.地震过后往往会伴有泥石流等灾害,泥石流之所以会造成巨大的危害,是因为石头、泥土被雨水从高处冲下来时将 能转化为巨大的 能。灾害发生后,救灾飞机迅速到达灾区上空,当它在一定高度匀速飞行并投下救灾物资后,飞机的机械能将 (选填“变大”“变小”或“不变”)。
16.如图所示是搬运砖头的独轮车,已知车厢和砖头的总重力G=1 400 N。
(1)该独轮车属于____________杠杆,工人师傅推车时,人手向上的力F为________ N,为了更省力,工人师傅可以采取的措施是________(写出一条即可)。
(2)工人师傅推走独轮车之前,需先将其撑脚抬离地面,慢慢抬起的过程中,若向上施加在车把手上的力始终与把手垂直,则这个力的大小________(填“逐渐增大”“逐渐变小”或“始终不变”)。
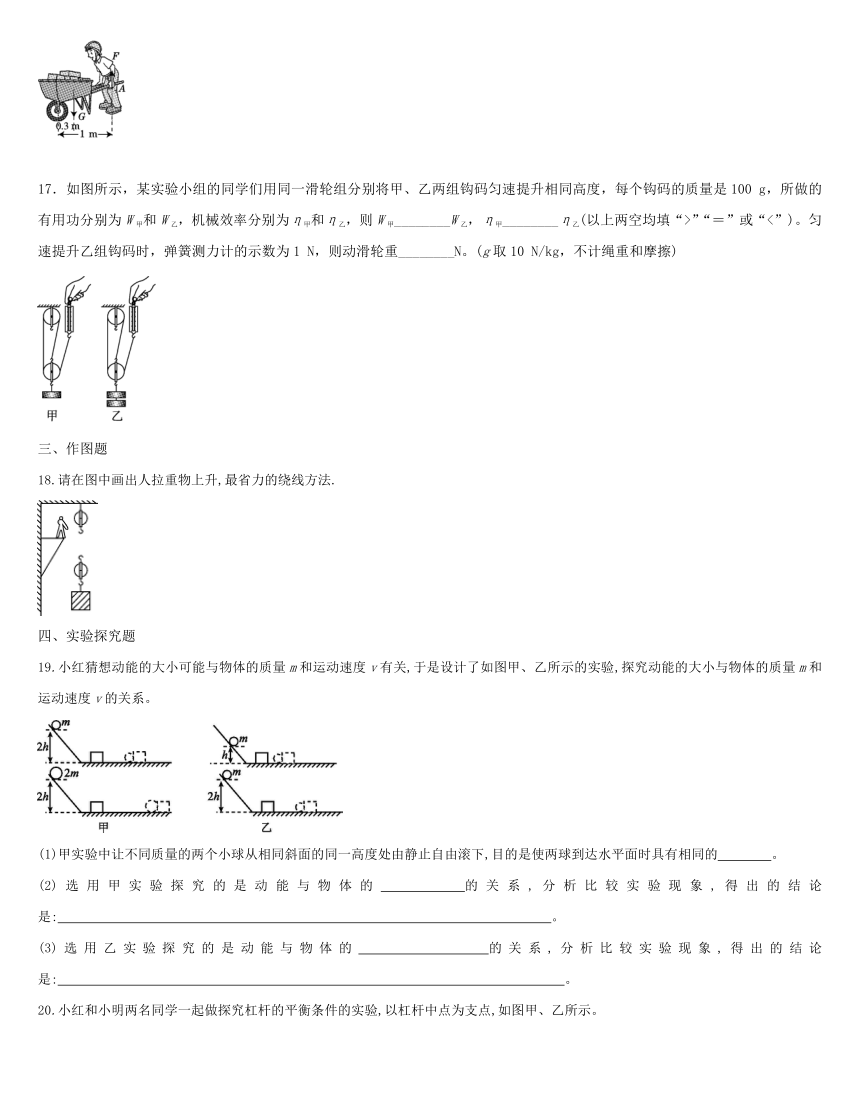
17.如图所示,某实验小组的同学们用同一滑轮组分别将甲、乙两组钩码匀速提升相同高度,每个钩码的质量是100 g,所做的有用功分别为W甲和W乙,机械效率分别为η甲和η乙,则W甲________W乙,η甲________η乙(以上两空均填“>”“=”或“<”)。匀速提升乙组钩码时,弹簧测力计的示数为1 N,则动滑轮重________N。(g取10 N/kg,不计绳重和摩擦)
三、作图题
18.请在图中画出人拉重物上升,最省力的绕线方法.
四、实验探究题
19.小红猜想动能的大小可能与物体的质量m和运动速度v有关,于是设计了如图甲、乙所示的实验,探究动能的大小与物体的质量m和运动速度v的关系。
(1)甲实验中让不同质量的两个小球从相同斜面的同一高度处由静止自由滚下,目的是使两球到达水平面时具有相同的 。
(2)选用甲实验探究的是动能与物体的 的关系,分析比较实验现象,得出的结论是: 。
(3)选用乙实验探究的是动能与物体的 的关系,分析比较实验现象,得出的结论是: 。
20.小红和小明两名同学一起做探究杠杆的平衡条件的实验,以杠杆中点为支点,如图甲、乙所示。
(1)若实验前杠杆右端低左端高,为使其在水平位置平衡,应将右端的平衡螺母向 端调节。
(2)如图甲所示,杠杆在水平位置平衡,记录数据。根据这一次实验数据,小红同学立即分析得出杠杆的平衡条件,这种做法的不足是: 。
(3)如图乙所示,小明同学设计了两种实验方案:第一种,弹簧测力计沿竖直方向拉,其读数为F1;第二种,弹簧测力计倾斜拉,其读数为F2。第 (选填“一”或“二”)种实验方案更方便。在同等条件下,两次弹簧测力计读数F1 (选填“<”“=”或“>”)F2。
(4)小明同学用图丙装置进行探究,发现当杠杆水平平衡时,与小红同学得出的杠杆平衡条件不相符,其可能的原因是: 。
五、计算题
21.如图甲所示的地面清洁机器人,机器人在水平地面上运动时,所受推力与速度关系如图乙所示。求:
(1)该机器人所提供的水平推力为50N时,匀速直线运动2s,此时水平推力做了多少功?
(2)该机器人在水平地面上以0.5m/s速度匀速直线运动时,水平推力的功率是多大?
22.用滑轮提起货物,如图所示,不计滑轮和绳的重力及其他摩擦,货物重500牛,被匀速提升5米,求:
(1)拉力F的大小;
(2)绳子自由端移动的距离;
(3)拉力F做的功;
(4)若货物以0.4米/秒匀速上升时,拉力F的功率。
第十章
A
2.C
3.D
4.C 点拨:木棒水平,木棒的重力是阻力,阻力G与阻力臂lG不变,由图示可知,动力由FC变为FB时,动力臂l先变大后变小,由杠杆平衡条件得:G×lG=F×l,所以动力先变小后变大,故选C。
5 A 6 B 7 C
8.B 解析: 由图乙可知,在2~4 s内,拉力F=3 N,
由图丙可知,在2~4 s内,物体做匀速直线运动,v=5.0 m/s,此时摩擦力与拉力是一对平衡力,大小相等,f=F=3 N,
由v=可得,物体运动的距离:s=vt=5.0 m/s×2 s=10 m,
物体克服摩擦力所做的功:
W=fs=3 N×10 m=30 J。
9.D 解析: 人对船做的有用功:W有=F阻s船=160 N×5 m=800 J,故A错误;
由图可知该滑轮为动滑轮,n=2,绳子自由端移动的距离:s绳=2s船=2×5 m=10 m,
人做的总功:W总=Fs绳=100 N×10 m=1000 J,故B错误;
人做的有用功的功率:P有===80 W,故C错误;
滑轮的机械效率:η=×100%=×100%=80%,故D正确。
10.D 解析: 由图知,甲滑轮组中承担物重的绳子段数n甲=3,乙滑轮组中承担物重的绳子段数n乙=4。
若重物上升高度为h,则两滑轮组中绳端移动的距离分别为:s甲=3h,s乙=4h;
甲滑轮组中拉力做的总功为W甲总=F1·3h,乙滑轮组中拉力做的总功为W乙总=F2·4h,已知F1=F2,所以W甲总已知时间相同,由公式P=知,P甲总甲、乙两滑轮组提升的物重G相同,设一个动滑轮的重为G动,
不计绳重及摩擦,则甲滑轮组的机械效率为η甲====,
同理可得,乙滑轮组的机械效率为η乙=,
所以η甲>η乙,故C错误,D正确。
11. 不变 增大
12.做 不做 解析: 小球从A点向B点摆动的过程中,小球的高度降低,在重力的作用下沿重力的方向移动了距离,所以小球受到的重力对小球做了功;细绳对小球的拉力方向与小球的运动方向垂直,小球没有在拉力的作用下移动距离,故细绳对小球的拉力不做功。
13.3×104 0
解析: 在上升的过程中,起重机做功:W=Gh=3×103 N×10 m=3×104 J;将重为3×103 N的混凝土板匀速平移5 m,虽然有距离,也有力,但起重机的拉力方向和移动距离的方向垂直,所以起重机没有做功,即起重机做的功为0 J。
14.0 15 80%
15.重力势 动 变小
16.(1)省力;420;手向后移动
(2)逐渐变小
17.<;<;1
18. 如图所示.
19.(1)速度
(2)质量 运动速度一定时,物体的质量越大,动能越大
(3)速度 质量一定时,物体的速度越大,动能越大
20.(1)左
(2)实验次数太少,结论具有偶然性
(3)一 <
(4)杠杆自重对实验产生影响
解析: (1)杠杆右端低左端高,应将平衡螺母向较高的一端调节,即将平衡螺母向左端调节。
(2)由一次实验数据总结实验结论是不合理的,因为一次实验的结果具有偶然性。(3)力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆上直接读出来,因此第一种实验方案更方便;因为第一种方案的动力臂要大于第二种方案的动力臂,根据杠杆的平衡条件,在阻力和阻力臂都相同的情况下,动力臂越大,越省力,所以F121.(1)30J;(2)75W
22.(1)250N;(2)10m;(3)2500J;(4)200W
一、选择题
1.如图所示的工具中属于费力杠杆的是 ( )
A.用钓鱼竿钓鱼 B.手推独轮车 C.开瓶器 D.用天平称质量
2.以下四幅图中,克服物体重力做功的是( )
3.一个滑轮组经改装后提高了机械效率,用它把同一物体匀速提升同样的高度,改进后与改进前相比较( )
A.总功减少,额外功增多
B.机械效率提高,机械做功加快
C.功率变大,机械做功更多
D.有用功不变,总功减少
4.如图所示是一根重为G的均匀木棒OA,能绕支点O自由转动,现用力FC作用于木棒的A端,使木棒OA在水平位置上保持平衡,当力F由FC方向逐渐转到FB方向时,力的大小变化情况为( )
A.一直在减小 B.保持不变 C.先减小后增大 D.先增大后减小
5.如图所示的卫星沿椭圆轨道绕地球运行,离地球最近的一点叫近地点,最远的一点叫远地点,它在大气层外运行,不受空气阻力,则下列说法正确的是 ( )
A.卫星从远地点运行到近地点,重力势能减小,动能增大,机械能守恒
B.卫星从远地点运行到近地点,重力势能增大,动能减小,机械能守恒
C.卫星从近地点运行到远地点,重力势能增大,动能增大,机械能不守恒
D.卫星从近地点运行到远地点,重力势能减小,动能减小,机械能不守恒
6.如图所示是一款质量为1.5 kg集自动充电、清扫、吸尘于一体的地面清扫机器人,某次寻找充电电源过程中,其在水平地面上2 min匀速行驶20 m,若机器人行驶过程的平均阻力为3 N,则关于机器人这次行驶过程中克服阻力所做的功和做功的功率分别是 ( )
A.300 J,2.5 W B.60 J,0.5 W C.60 J,30 W D.360 J,3 W
7.如图所示,轻质杠杆AB可绕O点转动,在A点用细线悬挂一重物,在B点施加一个竖直向下的动力,使该杠杆在水平位置保持平衡.若将动力的方向改为沿虚线方向,仍使杠杆在水平位置平衡,则 ( )
A.动力臂增大,动力增大
B.动力臂增大,动力减小
C.动力臂减小,动力增大
D.动力臂减小,动力减小
8.如图甲所示,物体在水平拉力F的作用下由静止沿粗糙水平面向右运动,0~6 s内拉力随时间变化的规律如图乙所示,速度随时间变化的规律如图丙所示,则在2~4 s内,物体克服摩擦力所做的功为 ( )
A.10 J B.30 J C.50 J D.80 J
9.如图所示,湖面上有一艘小船,站在岸上的人通过滑轮用100 N的力拉绳子的自由端,在10 s内小船向岸边匀速移动了5 m,船在水平方向受到的阻力为160 N。下列说法正确的是( )
A.人对船做的有用功为500 J B.人做的总功为800 J
C.人做的有用功的功率为50 W D.滑轮的机械效率为80%
10.某实验小组分别用如图所示的甲、乙两个滑轮组(每个滑轮等重),在相同时间内把重物G提升相同高度。若F1和F2大小相等,不计绳重及摩擦,下列说法正确的是 ( )
A.力F1和F2做功的功率相同 B.力F1和F2做的总功相同
C.两个滑轮组机械效率一样大 D.甲滑轮组的机械效率比乙滑轮组高
二、填空题
11.小明去商场购物,自动扶梯将他从一楼匀速送上二楼,在这个过程中,小明的动能 ,机械能 .(均填“增大”“减小”或“不变”)
12.如图所示的单摆,将小球从A点由静止释放,小球从A点向B点摆动的过程中,小球受到的重力对小球 功,细绳对小球的拉力 功。(均选填“做”或“不做”)
13.起重机将重为3×103 N的混凝土板从地面缓慢吊起上升了10 m,又匀速平移了5 m。在上升过程中起重机做的功为 J,在平移过程中起重机做的功为 J。
14.如图所示,小强在30 s内用滑轮组将物体A沿水平地面匀速移动6 m,已知物体A重为800 N,它受到的摩擦力为60 N,小强所用拉力为25 N,则物体A的重力做的功为
J,拉力的功率为 W,此滑轮组的机械效率为 。
15.地震过后往往会伴有泥石流等灾害,泥石流之所以会造成巨大的危害,是因为石头、泥土被雨水从高处冲下来时将 能转化为巨大的 能。灾害发生后,救灾飞机迅速到达灾区上空,当它在一定高度匀速飞行并投下救灾物资后,飞机的机械能将 (选填“变大”“变小”或“不变”)。
16.如图所示是搬运砖头的独轮车,已知车厢和砖头的总重力G=1 400 N。
(1)该独轮车属于____________杠杆,工人师傅推车时,人手向上的力F为________ N,为了更省力,工人师傅可以采取的措施是________(写出一条即可)。
(2)工人师傅推走独轮车之前,需先将其撑脚抬离地面,慢慢抬起的过程中,若向上施加在车把手上的力始终与把手垂直,则这个力的大小________(填“逐渐增大”“逐渐变小”或“始终不变”)。
17.如图所示,某实验小组的同学们用同一滑轮组分别将甲、乙两组钩码匀速提升相同高度,每个钩码的质量是100 g,所做的有用功分别为W甲和W乙,机械效率分别为η甲和η乙,则W甲________W乙,η甲________η乙(以上两空均填“>”“=”或“<”)。匀速提升乙组钩码时,弹簧测力计的示数为1 N,则动滑轮重________N。(g取10 N/kg,不计绳重和摩擦)
三、作图题
18.请在图中画出人拉重物上升,最省力的绕线方法.
四、实验探究题
19.小红猜想动能的大小可能与物体的质量m和运动速度v有关,于是设计了如图甲、乙所示的实验,探究动能的大小与物体的质量m和运动速度v的关系。
(1)甲实验中让不同质量的两个小球从相同斜面的同一高度处由静止自由滚下,目的是使两球到达水平面时具有相同的 。
(2)选用甲实验探究的是动能与物体的 的关系,分析比较实验现象,得出的结论是: 。
(3)选用乙实验探究的是动能与物体的 的关系,分析比较实验现象,得出的结论是: 。
20.小红和小明两名同学一起做探究杠杆的平衡条件的实验,以杠杆中点为支点,如图甲、乙所示。
(1)若实验前杠杆右端低左端高,为使其在水平位置平衡,应将右端的平衡螺母向 端调节。
(2)如图甲所示,杠杆在水平位置平衡,记录数据。根据这一次实验数据,小红同学立即分析得出杠杆的平衡条件,这种做法的不足是: 。
(3)如图乙所示,小明同学设计了两种实验方案:第一种,弹簧测力计沿竖直方向拉,其读数为F1;第二种,弹簧测力计倾斜拉,其读数为F2。第 (选填“一”或“二”)种实验方案更方便。在同等条件下,两次弹簧测力计读数F1 (选填“<”“=”或“>”)F2。
(4)小明同学用图丙装置进行探究,发现当杠杆水平平衡时,与小红同学得出的杠杆平衡条件不相符,其可能的原因是: 。
五、计算题
21.如图甲所示的地面清洁机器人,机器人在水平地面上运动时,所受推力与速度关系如图乙所示。求:
(1)该机器人所提供的水平推力为50N时,匀速直线运动2s,此时水平推力做了多少功?
(2)该机器人在水平地面上以0.5m/s速度匀速直线运动时,水平推力的功率是多大?
22.用滑轮提起货物,如图所示,不计滑轮和绳的重力及其他摩擦,货物重500牛,被匀速提升5米,求:
(1)拉力F的大小;
(2)绳子自由端移动的距离;
(3)拉力F做的功;
(4)若货物以0.4米/秒匀速上升时,拉力F的功率。
第十章
A
2.C
3.D
4.C 点拨:木棒水平,木棒的重力是阻力,阻力G与阻力臂lG不变,由图示可知,动力由FC变为FB时,动力臂l先变大后变小,由杠杆平衡条件得:G×lG=F×l,所以动力先变小后变大,故选C。
5 A 6 B 7 C
8.B 解析: 由图乙可知,在2~4 s内,拉力F=3 N,
由图丙可知,在2~4 s内,物体做匀速直线运动,v=5.0 m/s,此时摩擦力与拉力是一对平衡力,大小相等,f=F=3 N,
由v=可得,物体运动的距离:s=vt=5.0 m/s×2 s=10 m,
物体克服摩擦力所做的功:
W=fs=3 N×10 m=30 J。
9.D 解析: 人对船做的有用功:W有=F阻s船=160 N×5 m=800 J,故A错误;
由图可知该滑轮为动滑轮,n=2,绳子自由端移动的距离:s绳=2s船=2×5 m=10 m,
人做的总功:W总=Fs绳=100 N×10 m=1000 J,故B错误;
人做的有用功的功率:P有===80 W,故C错误;
滑轮的机械效率:η=×100%=×100%=80%,故D正确。
10.D 解析: 由图知,甲滑轮组中承担物重的绳子段数n甲=3,乙滑轮组中承担物重的绳子段数n乙=4。
若重物上升高度为h,则两滑轮组中绳端移动的距离分别为:s甲=3h,s乙=4h;
甲滑轮组中拉力做的总功为W甲总=F1·3h,乙滑轮组中拉力做的总功为W乙总=F2·4h,已知F1=F2,所以W甲总
不计绳重及摩擦,则甲滑轮组的机械效率为η甲====,
同理可得,乙滑轮组的机械效率为η乙=,
所以η甲>η乙,故C错误,D正确。
11. 不变 增大
12.做 不做 解析: 小球从A点向B点摆动的过程中,小球的高度降低,在重力的作用下沿重力的方向移动了距离,所以小球受到的重力对小球做了功;细绳对小球的拉力方向与小球的运动方向垂直,小球没有在拉力的作用下移动距离,故细绳对小球的拉力不做功。
13.3×104 0
解析: 在上升的过程中,起重机做功:W=Gh=3×103 N×10 m=3×104 J;将重为3×103 N的混凝土板匀速平移5 m,虽然有距离,也有力,但起重机的拉力方向和移动距离的方向垂直,所以起重机没有做功,即起重机做的功为0 J。
14.0 15 80%
15.重力势 动 变小
16.(1)省力;420;手向后移动
(2)逐渐变小
17.<;<;1
18. 如图所示.
19.(1)速度
(2)质量 运动速度一定时,物体的质量越大,动能越大
(3)速度 质量一定时,物体的速度越大,动能越大
20.(1)左
(2)实验次数太少,结论具有偶然性
(3)一 <
(4)杠杆自重对实验产生影响
解析: (1)杠杆右端低左端高,应将平衡螺母向较高的一端调节,即将平衡螺母向左端调节。
(2)由一次实验数据总结实验结论是不合理的,因为一次实验的结果具有偶然性。(3)力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆上直接读出来,因此第一种实验方案更方便;因为第一种方案的动力臂要大于第二种方案的动力臂,根据杠杆的平衡条件,在阻力和阻力臂都相同的情况下,动力臂越大,越省力,所以F1
22.(1)250N;(2)10m;(3)2500J;(4)200W
同课章节目录
- 第一章 打开物理世界的大门
- 第一节 走进神奇
- 第二节 探索之路
- 第三节 站在巨人的肩膀上
- 第二章 运动的世界
- 第一节 动与静
- 第二节 长度与时间的测量
- 第三节 快与慢
- 第四节 科学探究:速度的变化
- 第三章 声的世界
- 第一节 科学探究:声音的产生与传播
- 第二节 声音的特性
- 第三节 超声与次声
- 第四章 多彩的光
- 第一节 光的反射
- 第二节 平面镜成像
- 第三节 光的折射
- 第四节 光的色散
- 第五节 科学探究:凸透镜成像
- 第六节 神奇的眼睛
- 第五章 质量与密度
- 第一节 质量
- 第二节 学习使用天平和量筒
- 第三节 科学探究:物质的密度
- 第四节 密度知识的应用
- 第六章 熟悉而陌生的力
- 第一节 力
- 第二节 怎样描述力
- 第三节 弹力与弹簧测力计
- 第四节 来自地球的力
- 第五节 科学探究:摩擦力
- 第七章 力与运动
- 第一节 科学探究:牛顿第一定律
- 第二节 力的合成
- 第三节 力的平衡
- 第八章 压强
- 第一节 压力的作用效果
- 第二节 科学探究:液体的压强
- 第三节 空气的“力量”
- 第四节 流体压强与流速的关系
- 第九章 浮力
- 第一节 认识浮力
- 第二节 阿基米德原理
- 第三节 物体的浮与沉
- 第十章 机械与人
- 第一节 科学探究:杠杆的平衡条件
- 第二节 滑轮及其应用
- 第三节 做功了吗
- 第四节 做功的快慢
- 第五节 机械效率
- 第六节 合理利用机械能
- 第十一章 小粒子与大宇宙
- 第一节 走进微观
- 第二节 看不见的运动
- 第三节 探索宇宙