教科版物理八年级下册 11.1 杠杆(共34张PPT)
文档属性
| 名称 | 教科版物理八年级下册 11.1 杠杆(共34张PPT) |

|
|
| 格式 | pptx | ||
| 文件大小 | 2.1MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 教科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-03-03 00:00:00 | ||
图片预览




文档简介
(共34张PPT)
杠杆
人们将机械的各种构件归并为杠杆、滑轮、轮轴、斜面、螺旋等,并把它们称为简单机械。
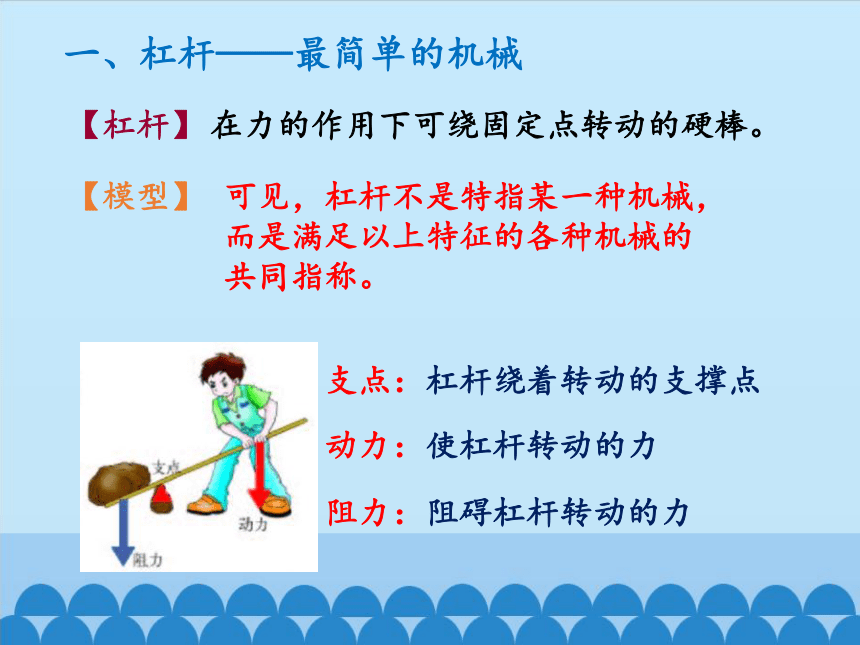
一、杠杆——最简单的机械
在力的作用下可绕固定点转动的硬棒。
【杠杆】
【模型】
可见,杠杆不是特指某一种机械,而是满足以上特征的各种机械的共同指称。
支点:杠杆绕着转动的支撑点
动力:使杠杆转动的力
阻力:阻碍杠杆转动的力
一些生活中可看作杠杆模型的工具。
【列举】
【复杂机械】
蒸汽机
拖拉机
汽车
起重机
复杂机械是由简单机械组成的。
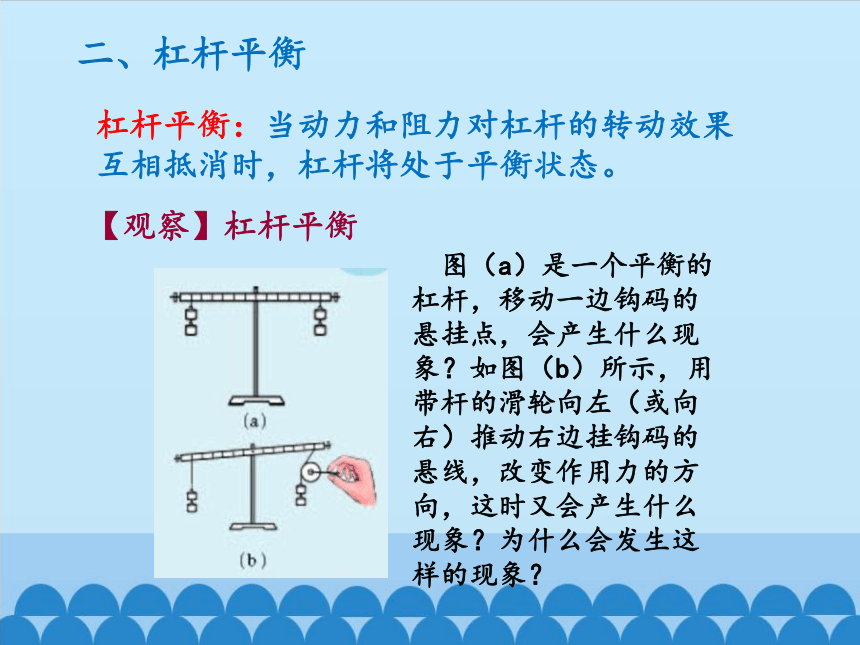
二、杠杆平衡
杠杆平衡:当动力和阻力对杠杆的转动效果互相抵消时,杠杆将处于平衡状态。
【观察】杠杆平衡
图(a)是一个平衡的杠杆,移动一边钩码的悬挂点,会产生什么现象?如图(b)所示,用带杆的滑轮向左(或向右)推动右边挂钩码的悬线,改变作用力的方向,这时又会产生什么现象?为什么会发生这样的现象?
【观察结果】
由观察结果可知:杠杆的平衡不仅与动力和阻力的大小有关,还与力的作用点及力的作用方向有关。
【思考】
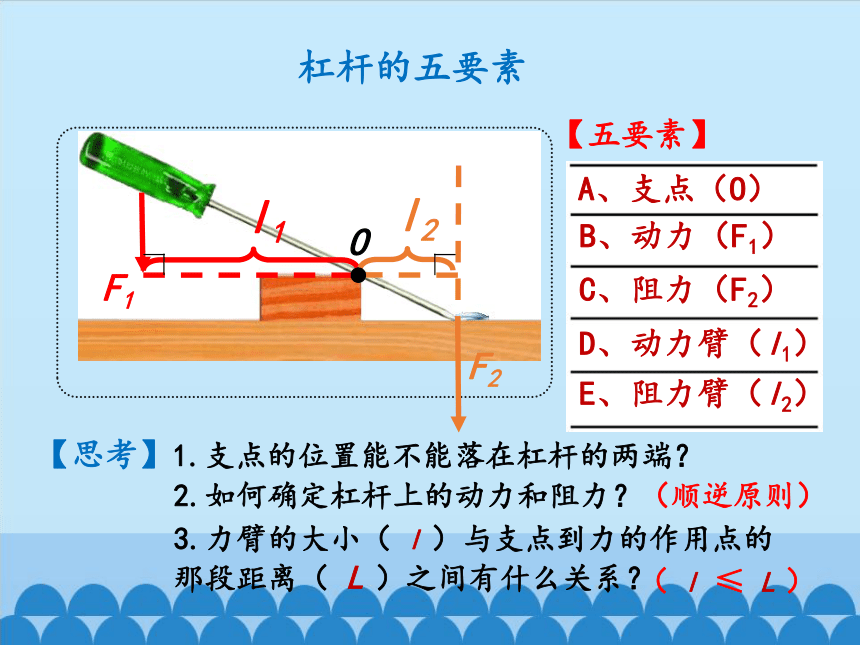
杠杆的五要素
A、支点(O)
B、动力(F1)
C、阻力(F2)
D、动力臂(l1)
E、阻力臂(l2)
【五要素】
1.支点的位置能不能落在杠杆的两端?
2.如何确定杠杆上的动力和阻力?
3.力臂的大小( l )与支点到力的作用点的那段距离( L )之间有什么关系?
( l ≤ L )
(顺逆原则)
l1
l2
O
F1
F2
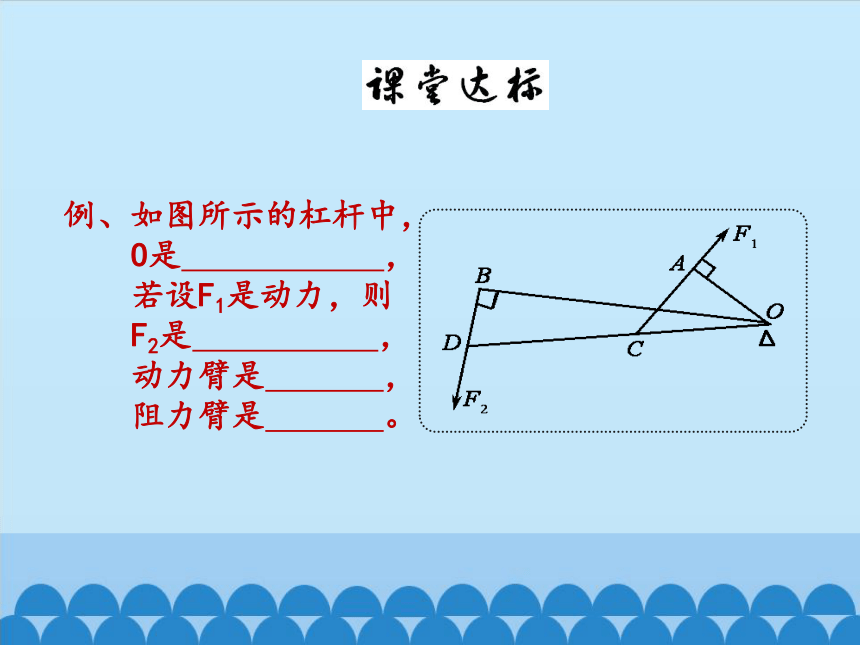
例、如图所示的杠杆中,
O是 ,
若设F1是动力,则
F2是 ,
动力臂是 ,
阻力臂是 。
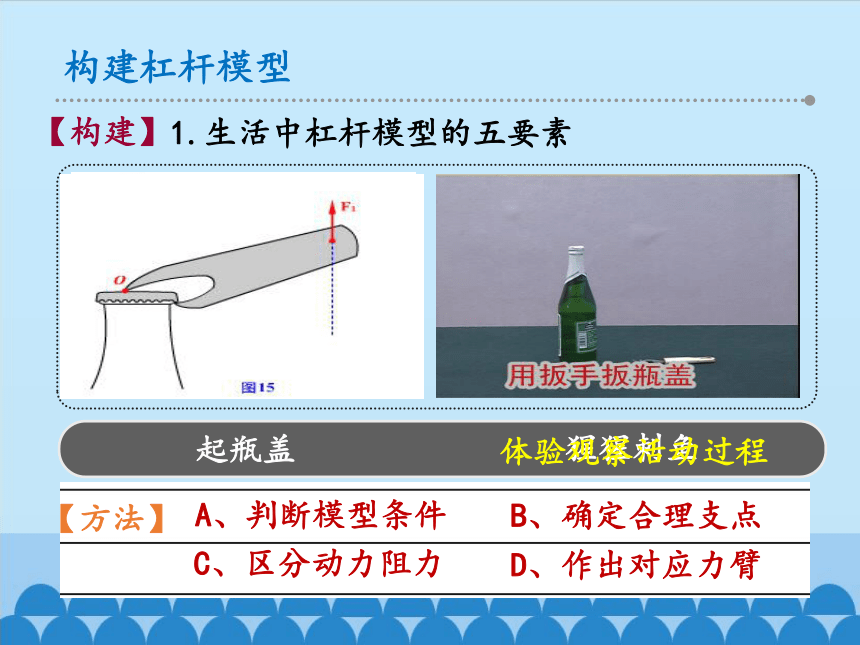
构建杠杆模型
1.生活中杠杆模型的五要素
【构建】
起瓶盖
猩猩刺鱼
【方法】
A、判断模型条件
B、确定合理支点
C、区分动力阻力
D、作出对应力臂
体验观察活动过程
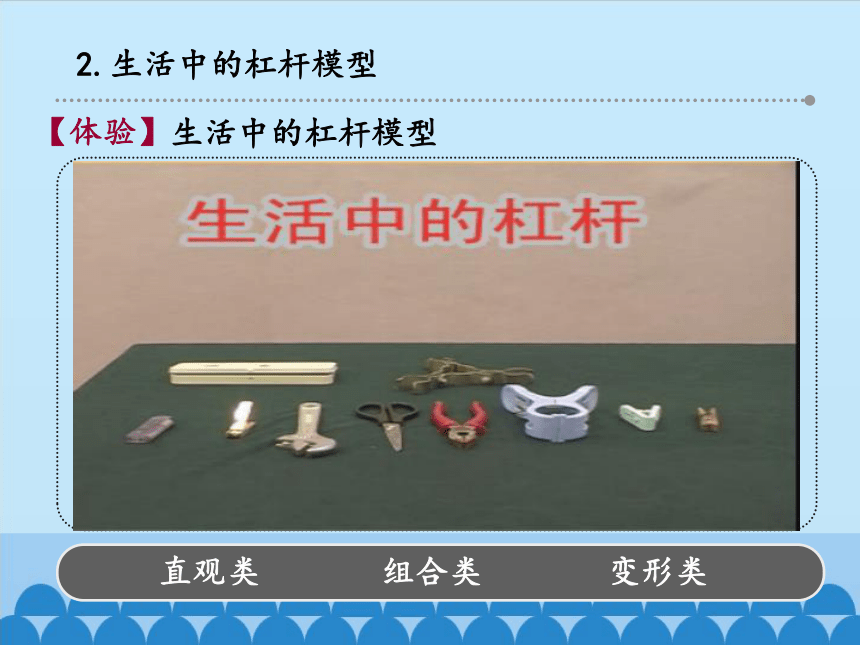
生活中的杠杆模型
【体验】
组合类
变形类
直观类
2.生活中的杠杆模型
【钓鱼杆】
作出其杠杆模型的五要素。
试一试
【镊子】
作出其杠杆模型的五要素。
试一试
例、构建下列杠杆模型,画出对应的五要素。
杠杆的平衡条件
杠杆在动力、阻力作用下静止或匀速转动
【杠杆平衡】
【活动】
杠杆满足什么条件才能处于平衡状态呢?
力大则对应力臂要小,力小则对应力臂要大
体重不同的两人能不能让跷跷板稳定下来?
【思考】
【猜想】
方案
C.实验中如何快速测得动(阻)力臂?
(多个钩码)
B.实验中如何方便地提供动力和阻力?
(平衡螺母)
A.实验中如何解决杠杆自重对平衡的影响?
(水平位置平衡)
(刻度尺)
(在杠杆上标记均匀刻度)
探究实验:杠杆的平衡条件
2.动力=阻力 动力臂=阻力臂
1.动力×动力臂=阻力×阻力臂
实验结论
【内容】
【公式】
【拓展】
【思考】
杠杆平衡原理
动力乘以动力臂等于阻力乘以阻力臂
F1l1=F2l2
杠杆受多个动(阻)力的平衡条件是什么呢?
给我一个支点和一根足够长的硬
棒,我就能撬动地球。
——阿基米德
F1l1+ Fnln =F2l2 + Fmlm
F1l1= F2l2
阿基米德撬地球的杠杆应该有什么特点呢?
1
省力杠杆
省力杠杆有哪些特点?
三、杠杆的分类
【省力杠杆】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
压水井手柄等
2
费力杠杆
【费力杠杆】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
笤帚
筷子
费力杠杆有哪些特点?
镊子
3
等臂杠杆
天平如果不等臂怎么修正?
【等臂杠杆】
【特点】
动力臂等于阻力臂
动力等于阻力,
不费力不省距离
【实例】
天平等
(等量替代)
讨论交流:研究杆秤
杆秤曾是我国应用最广泛的称重工具,它是一种典型的杠杆。试分析它的工作原理,并比较它和天平的优缺点。
古代舂米
古代打水
知识回顾
杠杆平衡条件:
(1)内容:
动力乘以动力臂等于阻力乘以阻力臂
(2)表达式:
F1 ×L1=F2 ×L2
一、杠杆原理的应用
【杆秤原理的研究】
【原理】
1.杆秤上的刻度线是否均匀分布?
3.有一种双提钮杆秤,双提钮的作用是什么?
2.长期使用秤砣生锈对测量结果有什么影响?
F1l1=F2l2
m物gAO=m砣gOB
m物=m砣OB/AO
m物与OB成正比
【思考】
(均匀)
(偏小)
(量程)
【平衡要素的计算1】
【方法】
1.合理构建模型,明确平衡要素
3.注意单位统一,规范解题过程
2.对应杠杆原理,落实公式变形
【平衡要素的计算2】
例、扁担长2m,两端物体的质量
分别为50kg和30kg。若不考虑扁
担的重力。人的肩头应在什么位
置,扁担才平衡?
【解】
F1l1=F2l2
m1gAO=m2g(AB-AO)
50kgAO=30kg(2m-AO)
解之得:AO=0.75m
肩头离A端0.75m处,扁担可保持平衡。
【答】
例、如图,质量可忽略的杠杆上所标的每一格长度都是相
等的,0为支点,杠杆两边所挂的每一个钩码均相同,
杠杆在水平位置平衡。在下列情况下,杠杆仍在水平
位置保持平衡的是( )
A.两边都减少一个钩码
B.两边的钩码下各加挂一个
相同的钩码
C.左边钩码向右移一格,右
边钩码同时向左移一格
D.右边加挂一个相同钩码,左边钩码同时向左移一格
F1l1=F2l2
F1l1= F2l2
【动态平衡的分析1】
D
【动态平衡的分析2】
例、如图所示,一个轻质杠杆可绕轴O转动,在直杆的中点挂一重物,在杆的另一端施加一个动力F,将直杆从右下位置慢慢抬起到水平位置过程中,
力F大小的变化情况是 ( )
A.一直增大 B.一直减小
C.保持不变 D.无法确定
【动态平衡的分析3】
例、如图所示,在一个轻质杠杆
的中点挂一重物,在杆的另
一端施加一个动力F,使杠
杆保持平衡,然后向右转动
F至水平方向,这一过程中
F变化情况是 ( )
A.一直增大 B.一直减小
C.先变小后变大 D.先变大后变小
思考:如何确定出使杠杆平衡的最小动力呢?
C
【最小动力的确定1】
【方法】
1.合理确定支点O和动力作用点
3.作动力作用线,判断阻力作用效果
2.连线支点和动力作用点为最大动力臂
4.根据“顺逆原则”确定动力方向
【最小动力的确定2】
可见,杠杆这一简单机械依然具有重要的价值
谢 谢
杠杆
人们将机械的各种构件归并为杠杆、滑轮、轮轴、斜面、螺旋等,并把它们称为简单机械。
一、杠杆——最简单的机械
在力的作用下可绕固定点转动的硬棒。
【杠杆】
【模型】
可见,杠杆不是特指某一种机械,而是满足以上特征的各种机械的共同指称。
支点:杠杆绕着转动的支撑点
动力:使杠杆转动的力
阻力:阻碍杠杆转动的力
一些生活中可看作杠杆模型的工具。
【列举】
【复杂机械】
蒸汽机
拖拉机
汽车
起重机
复杂机械是由简单机械组成的。
二、杠杆平衡
杠杆平衡:当动力和阻力对杠杆的转动效果互相抵消时,杠杆将处于平衡状态。
【观察】杠杆平衡
图(a)是一个平衡的杠杆,移动一边钩码的悬挂点,会产生什么现象?如图(b)所示,用带杆的滑轮向左(或向右)推动右边挂钩码的悬线,改变作用力的方向,这时又会产生什么现象?为什么会发生这样的现象?
【观察结果】
由观察结果可知:杠杆的平衡不仅与动力和阻力的大小有关,还与力的作用点及力的作用方向有关。
【思考】
杠杆的五要素
A、支点(O)
B、动力(F1)
C、阻力(F2)
D、动力臂(l1)
E、阻力臂(l2)
【五要素】
1.支点的位置能不能落在杠杆的两端?
2.如何确定杠杆上的动力和阻力?
3.力臂的大小( l )与支点到力的作用点的那段距离( L )之间有什么关系?
( l ≤ L )
(顺逆原则)
l1
l2
O
F1
F2
例、如图所示的杠杆中,
O是 ,
若设F1是动力,则
F2是 ,
动力臂是 ,
阻力臂是 。
构建杠杆模型
1.生活中杠杆模型的五要素
【构建】
起瓶盖
猩猩刺鱼
【方法】
A、判断模型条件
B、确定合理支点
C、区分动力阻力
D、作出对应力臂
体验观察活动过程
生活中的杠杆模型
【体验】
组合类
变形类
直观类
2.生活中的杠杆模型
【钓鱼杆】
作出其杠杆模型的五要素。
试一试
【镊子】
作出其杠杆模型的五要素。
试一试
例、构建下列杠杆模型,画出对应的五要素。
杠杆的平衡条件
杠杆在动力、阻力作用下静止或匀速转动
【杠杆平衡】
【活动】
杠杆满足什么条件才能处于平衡状态呢?
力大则对应力臂要小,力小则对应力臂要大
体重不同的两人能不能让跷跷板稳定下来?
【思考】
【猜想】
方案
C.实验中如何快速测得动(阻)力臂?
(多个钩码)
B.实验中如何方便地提供动力和阻力?
(平衡螺母)
A.实验中如何解决杠杆自重对平衡的影响?
(水平位置平衡)
(刻度尺)
(在杠杆上标记均匀刻度)
探究实验:杠杆的平衡条件
2.动力=阻力 动力臂=阻力臂
1.动力×动力臂=阻力×阻力臂
实验结论
【内容】
【公式】
【拓展】
【思考】
杠杆平衡原理
动力乘以动力臂等于阻力乘以阻力臂
F1l1=F2l2
杠杆受多个动(阻)力的平衡条件是什么呢?
给我一个支点和一根足够长的硬
棒,我就能撬动地球。
——阿基米德
F1l1+ Fnln =F2l2 + Fmlm
F1l1= F2l2
阿基米德撬地球的杠杆应该有什么特点呢?
1
省力杠杆
省力杠杆有哪些特点?
三、杠杆的分类
【省力杠杆】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
压水井手柄等
2
费力杠杆
【费力杠杆】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
笤帚
筷子
费力杠杆有哪些特点?
镊子
3
等臂杠杆
天平如果不等臂怎么修正?
【等臂杠杆】
【特点】
动力臂等于阻力臂
动力等于阻力,
不费力不省距离
【实例】
天平等
(等量替代)
讨论交流:研究杆秤
杆秤曾是我国应用最广泛的称重工具,它是一种典型的杠杆。试分析它的工作原理,并比较它和天平的优缺点。
古代舂米
古代打水
知识回顾
杠杆平衡条件:
(1)内容:
动力乘以动力臂等于阻力乘以阻力臂
(2)表达式:
F1 ×L1=F2 ×L2
一、杠杆原理的应用
【杆秤原理的研究】
【原理】
1.杆秤上的刻度线是否均匀分布?
3.有一种双提钮杆秤,双提钮的作用是什么?
2.长期使用秤砣生锈对测量结果有什么影响?
F1l1=F2l2
m物gAO=m砣gOB
m物=m砣OB/AO
m物与OB成正比
【思考】
(均匀)
(偏小)
(量程)
【平衡要素的计算1】
【方法】
1.合理构建模型,明确平衡要素
3.注意单位统一,规范解题过程
2.对应杠杆原理,落实公式变形
【平衡要素的计算2】
例、扁担长2m,两端物体的质量
分别为50kg和30kg。若不考虑扁
担的重力。人的肩头应在什么位
置,扁担才平衡?
【解】
F1l1=F2l2
m1gAO=m2g(AB-AO)
50kgAO=30kg(2m-AO)
解之得:AO=0.75m
肩头离A端0.75m处,扁担可保持平衡。
【答】
例、如图,质量可忽略的杠杆上所标的每一格长度都是相
等的,0为支点,杠杆两边所挂的每一个钩码均相同,
杠杆在水平位置平衡。在下列情况下,杠杆仍在水平
位置保持平衡的是( )
A.两边都减少一个钩码
B.两边的钩码下各加挂一个
相同的钩码
C.左边钩码向右移一格,右
边钩码同时向左移一格
D.右边加挂一个相同钩码,左边钩码同时向左移一格
F1l1=F2l2
F1l1= F2l2
【动态平衡的分析1】
D
【动态平衡的分析2】
例、如图所示,一个轻质杠杆可绕轴O转动,在直杆的中点挂一重物,在杆的另一端施加一个动力F,将直杆从右下位置慢慢抬起到水平位置过程中,
力F大小的变化情况是 ( )
A.一直增大 B.一直减小
C.保持不变 D.无法确定
【动态平衡的分析3】
例、如图所示,在一个轻质杠杆
的中点挂一重物,在杆的另
一端施加一个动力F,使杠
杆保持平衡,然后向右转动
F至水平方向,这一过程中
F变化情况是 ( )
A.一直增大 B.一直减小
C.先变小后变大 D.先变大后变小
思考:如何确定出使杠杆平衡的最小动力呢?
C
【最小动力的确定1】
【方法】
1.合理确定支点O和动力作用点
3.作动力作用线,判断阻力作用效果
2.连线支点和动力作用点为最大动力臂
4.根据“顺逆原则”确定动力方向
【最小动力的确定2】
可见,杠杆这一简单机械依然具有重要的价值
谢 谢