人教版初中物理八年级下册 第十二章《简单机械》检测题(Word版含答案)
文档属性
| 名称 | 人教版初中物理八年级下册 第十二章《简单机械》检测题(Word版含答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 965.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-03-22 00:00:00 | ||
图片预览
文档简介
第十二章《简单机械》检测题
一、单选题
1.下列有关机械做功、功率、机械效率的说法,正确的是( )
A.效率越高的机械,功率越大 B.做功越多的机械,功率越大
C.做有用功越多的机械,效率越高 D.功率越大的机械,做功越快
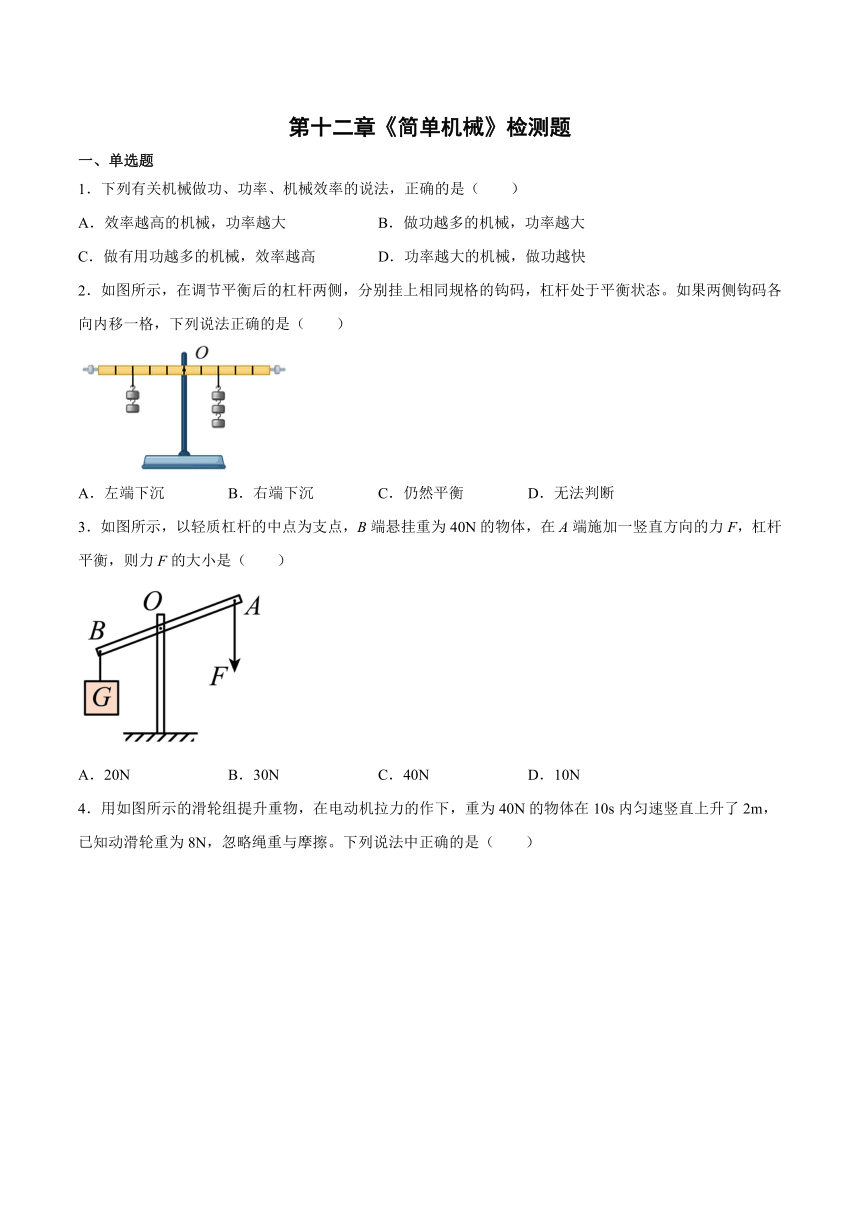
2.如图所示,在调节平衡后的杠杆两侧,分别挂上相同规格的钩码,杠杆处于平衡状态。如果两侧钩码各向内移一格,下列说法正确的是( )
A.左端下沉 B.右端下沉 C.仍然平衡 D.无法判断
3.如图所示,以轻质杠杆的中点为支点,B端悬挂重为40N的物体,在A端施加一竖直方向的力F,杠杆平衡,则力F的大小是( )
A.20N B.30N C.40N D.10N
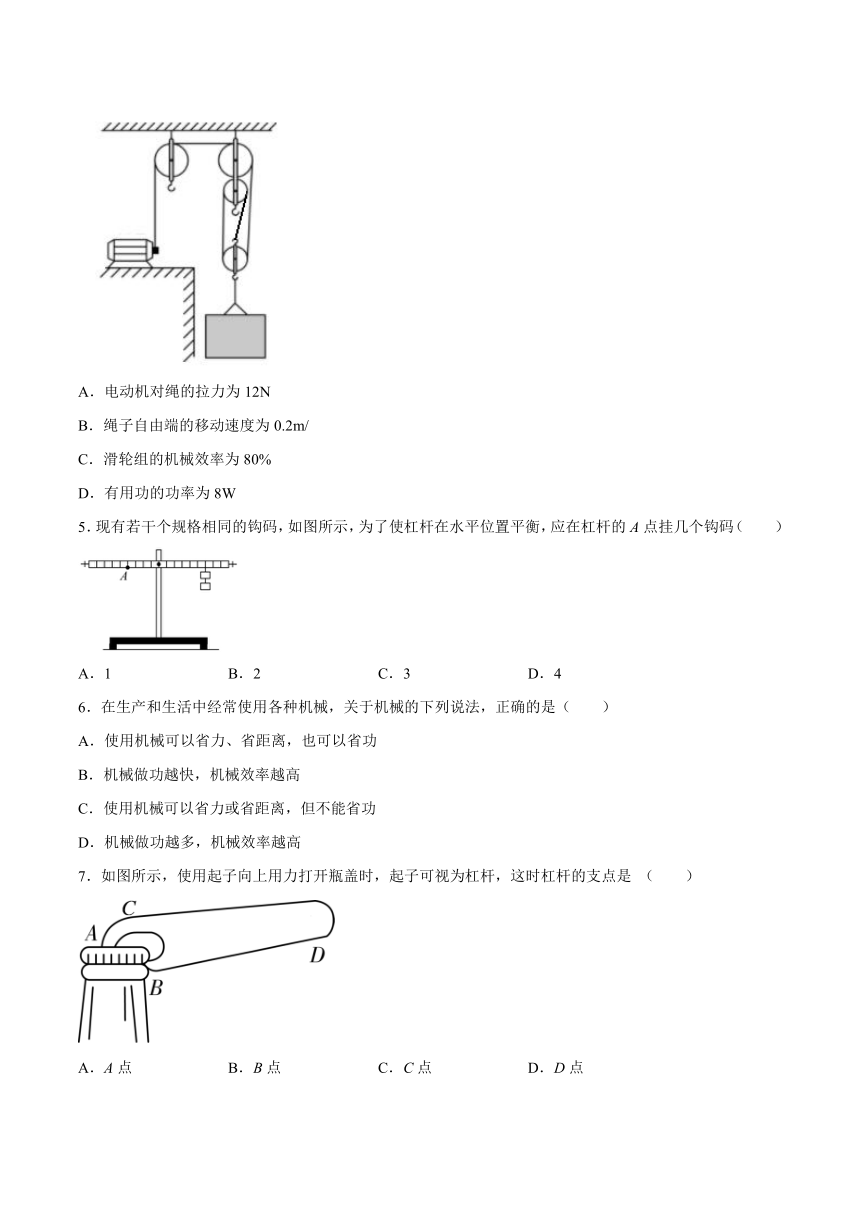
4.用如图所示的滑轮组提升重物,在电动机拉力的作下,重为40N的物体在10s内匀速竖直上升了2m,已知动滑轮重为8N,忽略绳重与摩擦。下列说法中正确的是( )
A.电动机对绳的拉力为12N
B.绳子自由端的移动速度为0.2m/
C.滑轮组的机械效率为80%
D.有用功的功率为8W
5.现有若干个规格相同的钩码,如图所示,为了使杠杆在水平位置平衡,应在杠杆的A点挂几个钩码( )
A.1 B.2 C.3 D.4
6.在生产和生活中经常使用各种机械,关于机械的下列说法,正确的是( )
A.使用机械可以省力、省距离,也可以省功
B.机械做功越快,机械效率越高
C.使用机械可以省力或省距离,但不能省功
D.机械做功越多,机械效率越高
7.如图所示,使用起子向上用力打开瓶盖时,起子可视为杠杆,这时杠杆的支点是 ( )
A.A点 B.B点 C.C点 D.D点
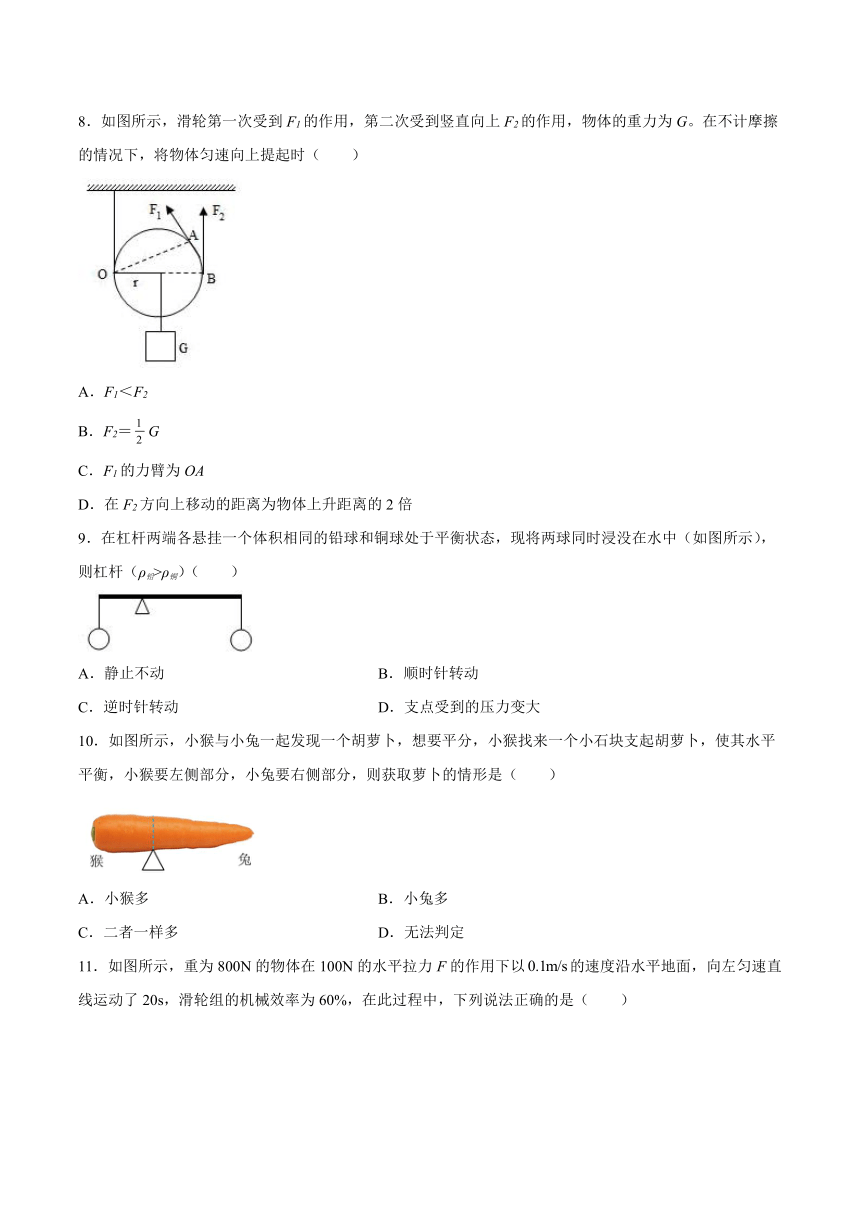
8.如图所示,滑轮第一次受到F1的作用,第二次受到竖直向上F2的作用,物体的重力为G。在不计摩擦的情况下,将物体匀速向上提起时( )
A.F1<F2
B.F2=G
C.F1的力臂为OA
D.在F2方向上移动的距离为物体上升距离的2倍
9.在杠杆两端各悬挂一个体积相同的铅球和铜球处于平衡状态,现将两球同时浸没在水中(如图所示),则杠杆(ρ铅>ρ铜)( )
A.静止不动 B.顺时针转动
C.逆时针转动 D.支点受到的压力变大
10.如图所示,小猴与小兔一起发现一个胡萝卜,想要平分,小猴找来一个小石块支起胡萝卜,使其水平平衡,小猴要左侧部分,小兔要右侧部分,则获取萝卜的情形是( )
A.小猴多 B.小兔多
C.二者一样多 D.无法判定
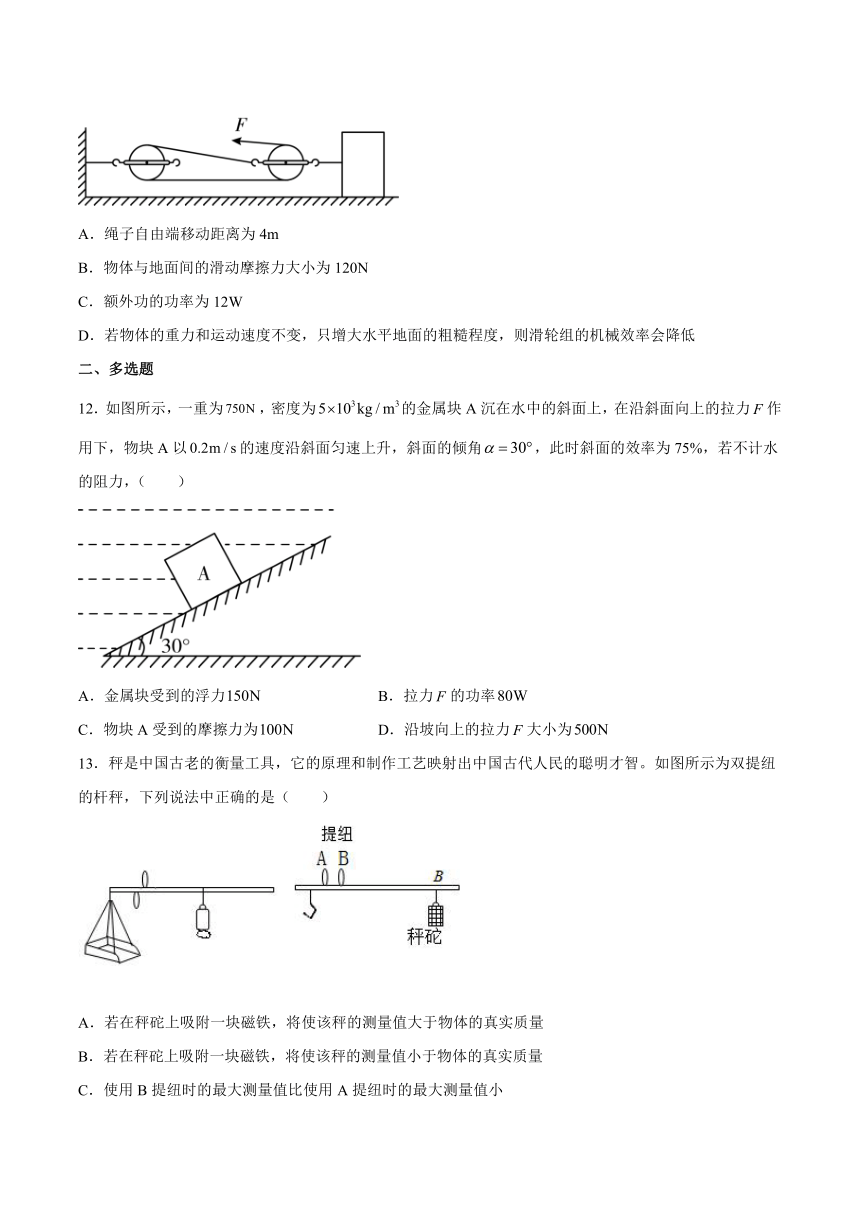
11.如图所示,重为800N的物体在100N的水平拉力F的作用下以的速度沿水平地面,向左匀速直线运动了20s,滑轮组的机械效率为60%,在此过程中,下列说法正确的是( )
A.绳子自由端移动距离为4m
B.物体与地面间的滑动摩擦力大小为120N
C.额外功的功率为12W
D.若物体的重力和运动速度不变,只增大水平地面的粗糙程度,则滑轮组的机械效率会降低
二、多选题
12.如图所示,一重为,密度为的金属块A沉在水中的斜面上,在沿斜面向上的拉力作用下,物块A以的速度沿斜面匀速上升,斜面的倾角,此时斜面的效率为75%,若不计水的阻力,( )
A.金属块受到的浮力 B.拉力的功率
C.物块A受到的摩擦力为 D.沿坡向上的拉力大小为
13.秤是中国古老的衡量工具,它的原理和制作工艺映射出中国古代人民的聪明才智。如图所示为双提纽的杆秤,下列说法中正确的是( )
A.若在秤砣上吸附一块磁铁,将使该秤的测量值大于物体的真实质量
B.若在秤砣上吸附一块磁铁,将使该秤的测量值小于物体的真实质量
C.使用B提纽时的最大测量值比使用A提纽时的最大测量值小
D.使用B提纽时的最大测量值比使用A提纽时的最大测量值大
14.如图是抽水马桶水箱进水自动控制的结构原理图,AOB为一可绕固定点O转动的轻质杠杆,已知OA:OB=1:2,A端用细线挂一空心铝球,质量为2.7kg。当铝球一半体积浸在水中,在B端施加3.5N的竖直向下的拉力F时,杠杆恰好在水平位置平衡。(ρ铝=2.7×103kg/m3,g=10N/kg)下列结果正确的是( )
A.该铝球重力是27N
B.杠杆A端受到竖直向下的拉力是7N
C.该铝球受到的浮力为5N
D.铝球空心的体积为3×10-3m3
15.如图所示,工人要将一块重900N的建材运到10m高处,装置中每个滑轮重100N,建材上升的速度是0.8m/s。在施工过程中,滑轮的摩擦和绳重均可忽略不计,下列说法正确的是( )
A.工人的拉力为500N B.人拉绳运动的距离为20m
C.工人的拉力为450N D.工人拉绳的速度为1.6m/s
16.如图所示,用滑轮组提升所受重力为900N的物体A,滑轮组绳子自由端在拉力F作用下40s内竖直匀速移动了12m,滑轮组的额外功是400J。则下列说法中正确的是(不计绳重和摩擦)( )
A.动滑轮所受的重力为100N B.物体A上升的速度是0.1m/s
C.拉力F的功率是90W D.滑轮组的机械效率是90%
三、填空题
17.如图所示,轻质杠杆OB可绕O点转动,OA=AB,用细线将重为G的物体悬挂在A点,在B点施加竖直向上的拉力F。在保持杠杆水平静止的情况下,拉力F=______G;若将拉力F改为沿图中虚线方向F将______(增大/不变/减小)。
18.如图所示为列车上出售食品的手推车。若货物在车内摆放均匀,当前轮B遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是______(写出字母);当后轮C遇到障碍物A时,售货员竖直向上提扶把,这时支点是______(写出字母),此时手推车可以视为______杠杆(选填“省力”、“费力”或“等臂”)。
四、实验题
19.小南和小桥利用如图所示的装置来探究“杠杆的平衡条件”。
(1)小南对如图甲所示的弹簧测力计进行调零,然后测出1个钩码重为0.5N;小桥观察到杠杆如图乙所示,此时应将杠杆右端的平衡螺母向______调节,使杠杆在水平位置平衡;
(2)如图丙所示,小南和小桥采用正确的操作方式使杠杆在水平位置平衡,这样做的目的是______。此时轻质弹簧测力计示数为______N;
(3)如图丁所示,改变拉力的方向(测力计从C缓慢转到D)使杠杆一直在水平位置平衡,则弹簧测力计的示数将______,原因是______;
(4)保持杠杆左边A处所挂钩码的位置和个数不变(杠杆每格长5cm),用弹簧测力计分别在杠杆右边的不同位置竖直向下拉杠杆,使杠杆保持水平平衡,记录每次弹簧测力计的示数F和对应悬挂位置到O轴的距离L,在F-L坐标中作出图像。其中正确的是( )
A. B. C.D.
五、计算题
20.如图所示是我国研制的新能源5G无人电动拖拉机,它以氢燃料供电为主、锂电池供电为辅,可以搭载深耕机、播种机等多种设备进行农田耕作。某次该电动拖拉机在水平公路上匀速直线行驶了15km,耗时20min到达目标农田。已知拖拉机质量为1t,受到的阻力为其重力的0.05倍。g取10N/kg。求:
(1)电动拖拉机的速度;
(2)在平直公路上行驶时牵引力所做的功;
(3)某次该拖拉机搭载深耕机耕地时,做的总功为6×1J,工作效率为60%,深耕机耕地的功率为500W,则拖拉机耕地多长时间?
21.如图所示,站在水平地面上的小林想通过杠杆AB和动滑轮拉起同样站在水平地面上的小新。杠杆AB可绕转轴O在竖直平面内转动,且OA:OB=1:2,小林的质量m1=50kg。小新的质量m2=48kg小新双脚与地面接触面积S=400cm2,当小林施加竖直向下的拉力F1时,小新未被拉动,此时小新对地面的压强p=2.5×103Pa,小林对地面的压强为p1;当小林施加竖直向下的拉力F2时,小新刚好被拉起,小林对地面的压强为p2,且p1:p2=16:15。不计绳重,杠杆重力和一切摩擦,g取10N/kg。求:
(1)小林施加拉力F1时,小新对地面的压力FN;
(2)动滑轮重力G动。
参考答案:
1.D 2.A 3.C 4.D 5.C 6.C 7.A 8.D 9.C 10.A 11.C 12.ABC 13.BC 14.ABD 15.ABD 16.ABD
17. (或0.5) 增大
18. C B 省力
19. 右 方便测量力臂 2 先变小后变大 动力臂先变大后变小(F2·l2不变) B
20.(1) 45km/h; (2) 7.5×106J; (3) 7200s
21.(1)100N;(2)20N
一、单选题
1.下列有关机械做功、功率、机械效率的说法,正确的是( )
A.效率越高的机械,功率越大 B.做功越多的机械,功率越大
C.做有用功越多的机械,效率越高 D.功率越大的机械,做功越快
2.如图所示,在调节平衡后的杠杆两侧,分别挂上相同规格的钩码,杠杆处于平衡状态。如果两侧钩码各向内移一格,下列说法正确的是( )
A.左端下沉 B.右端下沉 C.仍然平衡 D.无法判断
3.如图所示,以轻质杠杆的中点为支点,B端悬挂重为40N的物体,在A端施加一竖直方向的力F,杠杆平衡,则力F的大小是( )
A.20N B.30N C.40N D.10N
4.用如图所示的滑轮组提升重物,在电动机拉力的作下,重为40N的物体在10s内匀速竖直上升了2m,已知动滑轮重为8N,忽略绳重与摩擦。下列说法中正确的是( )
A.电动机对绳的拉力为12N
B.绳子自由端的移动速度为0.2m/
C.滑轮组的机械效率为80%
D.有用功的功率为8W
5.现有若干个规格相同的钩码,如图所示,为了使杠杆在水平位置平衡,应在杠杆的A点挂几个钩码( )
A.1 B.2 C.3 D.4
6.在生产和生活中经常使用各种机械,关于机械的下列说法,正确的是( )
A.使用机械可以省力、省距离,也可以省功
B.机械做功越快,机械效率越高
C.使用机械可以省力或省距离,但不能省功
D.机械做功越多,机械效率越高
7.如图所示,使用起子向上用力打开瓶盖时,起子可视为杠杆,这时杠杆的支点是 ( )
A.A点 B.B点 C.C点 D.D点
8.如图所示,滑轮第一次受到F1的作用,第二次受到竖直向上F2的作用,物体的重力为G。在不计摩擦的情况下,将物体匀速向上提起时( )
A.F1<F2
B.F2=G
C.F1的力臂为OA
D.在F2方向上移动的距离为物体上升距离的2倍
9.在杠杆两端各悬挂一个体积相同的铅球和铜球处于平衡状态,现将两球同时浸没在水中(如图所示),则杠杆(ρ铅>ρ铜)( )
A.静止不动 B.顺时针转动
C.逆时针转动 D.支点受到的压力变大
10.如图所示,小猴与小兔一起发现一个胡萝卜,想要平分,小猴找来一个小石块支起胡萝卜,使其水平平衡,小猴要左侧部分,小兔要右侧部分,则获取萝卜的情形是( )
A.小猴多 B.小兔多
C.二者一样多 D.无法判定
11.如图所示,重为800N的物体在100N的水平拉力F的作用下以的速度沿水平地面,向左匀速直线运动了20s,滑轮组的机械效率为60%,在此过程中,下列说法正确的是( )
A.绳子自由端移动距离为4m
B.物体与地面间的滑动摩擦力大小为120N
C.额外功的功率为12W
D.若物体的重力和运动速度不变,只增大水平地面的粗糙程度,则滑轮组的机械效率会降低
二、多选题
12.如图所示,一重为,密度为的金属块A沉在水中的斜面上,在沿斜面向上的拉力作用下,物块A以的速度沿斜面匀速上升,斜面的倾角,此时斜面的效率为75%,若不计水的阻力,( )
A.金属块受到的浮力 B.拉力的功率
C.物块A受到的摩擦力为 D.沿坡向上的拉力大小为
13.秤是中国古老的衡量工具,它的原理和制作工艺映射出中国古代人民的聪明才智。如图所示为双提纽的杆秤,下列说法中正确的是( )
A.若在秤砣上吸附一块磁铁,将使该秤的测量值大于物体的真实质量
B.若在秤砣上吸附一块磁铁,将使该秤的测量值小于物体的真实质量
C.使用B提纽时的最大测量值比使用A提纽时的最大测量值小
D.使用B提纽时的最大测量值比使用A提纽时的最大测量值大
14.如图是抽水马桶水箱进水自动控制的结构原理图,AOB为一可绕固定点O转动的轻质杠杆,已知OA:OB=1:2,A端用细线挂一空心铝球,质量为2.7kg。当铝球一半体积浸在水中,在B端施加3.5N的竖直向下的拉力F时,杠杆恰好在水平位置平衡。(ρ铝=2.7×103kg/m3,g=10N/kg)下列结果正确的是( )
A.该铝球重力是27N
B.杠杆A端受到竖直向下的拉力是7N
C.该铝球受到的浮力为5N
D.铝球空心的体积为3×10-3m3
15.如图所示,工人要将一块重900N的建材运到10m高处,装置中每个滑轮重100N,建材上升的速度是0.8m/s。在施工过程中,滑轮的摩擦和绳重均可忽略不计,下列说法正确的是( )
A.工人的拉力为500N B.人拉绳运动的距离为20m
C.工人的拉力为450N D.工人拉绳的速度为1.6m/s
16.如图所示,用滑轮组提升所受重力为900N的物体A,滑轮组绳子自由端在拉力F作用下40s内竖直匀速移动了12m,滑轮组的额外功是400J。则下列说法中正确的是(不计绳重和摩擦)( )
A.动滑轮所受的重力为100N B.物体A上升的速度是0.1m/s
C.拉力F的功率是90W D.滑轮组的机械效率是90%
三、填空题
17.如图所示,轻质杠杆OB可绕O点转动,OA=AB,用细线将重为G的物体悬挂在A点,在B点施加竖直向上的拉力F。在保持杠杆水平静止的情况下,拉力F=______G;若将拉力F改为沿图中虚线方向F将______(增大/不变/减小)。
18.如图所示为列车上出售食品的手推车。若货物在车内摆放均匀,当前轮B遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是______(写出字母);当后轮C遇到障碍物A时,售货员竖直向上提扶把,这时支点是______(写出字母),此时手推车可以视为______杠杆(选填“省力”、“费力”或“等臂”)。
四、实验题
19.小南和小桥利用如图所示的装置来探究“杠杆的平衡条件”。
(1)小南对如图甲所示的弹簧测力计进行调零,然后测出1个钩码重为0.5N;小桥观察到杠杆如图乙所示,此时应将杠杆右端的平衡螺母向______调节,使杠杆在水平位置平衡;
(2)如图丙所示,小南和小桥采用正确的操作方式使杠杆在水平位置平衡,这样做的目的是______。此时轻质弹簧测力计示数为______N;
(3)如图丁所示,改变拉力的方向(测力计从C缓慢转到D)使杠杆一直在水平位置平衡,则弹簧测力计的示数将______,原因是______;
(4)保持杠杆左边A处所挂钩码的位置和个数不变(杠杆每格长5cm),用弹簧测力计分别在杠杆右边的不同位置竖直向下拉杠杆,使杠杆保持水平平衡,记录每次弹簧测力计的示数F和对应悬挂位置到O轴的距离L,在F-L坐标中作出图像。其中正确的是( )
A. B. C.D.
五、计算题
20.如图所示是我国研制的新能源5G无人电动拖拉机,它以氢燃料供电为主、锂电池供电为辅,可以搭载深耕机、播种机等多种设备进行农田耕作。某次该电动拖拉机在水平公路上匀速直线行驶了15km,耗时20min到达目标农田。已知拖拉机质量为1t,受到的阻力为其重力的0.05倍。g取10N/kg。求:
(1)电动拖拉机的速度;
(2)在平直公路上行驶时牵引力所做的功;
(3)某次该拖拉机搭载深耕机耕地时,做的总功为6×1J,工作效率为60%,深耕机耕地的功率为500W,则拖拉机耕地多长时间?
21.如图所示,站在水平地面上的小林想通过杠杆AB和动滑轮拉起同样站在水平地面上的小新。杠杆AB可绕转轴O在竖直平面内转动,且OA:OB=1:2,小林的质量m1=50kg。小新的质量m2=48kg小新双脚与地面接触面积S=400cm2,当小林施加竖直向下的拉力F1时,小新未被拉动,此时小新对地面的压强p=2.5×103Pa,小林对地面的压强为p1;当小林施加竖直向下的拉力F2时,小新刚好被拉起,小林对地面的压强为p2,且p1:p2=16:15。不计绳重,杠杆重力和一切摩擦,g取10N/kg。求:
(1)小林施加拉力F1时,小新对地面的压力FN;
(2)动滑轮重力G动。
参考答案:
1.D 2.A 3.C 4.D 5.C 6.C 7.A 8.D 9.C 10.A 11.C 12.ABC 13.BC 14.ABD 15.ABD 16.ABD
17. (或0.5) 增大
18. C B 省力
19. 右 方便测量力臂 2 先变小后变大 动力臂先变大后变小(F2·l2不变) B
20.(1) 45km/h; (2) 7.5×106J; (3) 7200s
21.(1)100N;(2)20N