4.机械手项目(共17张PPT)
图片预览
文档简介
(共17张PPT)
机械手设计制作
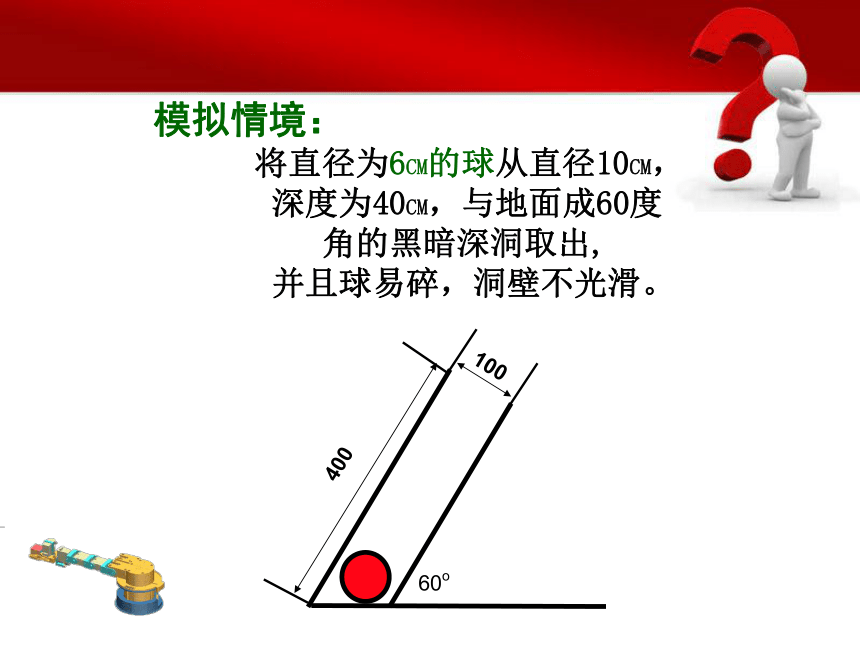
模拟情境:
将直径为6CM的球从直径10CM,
深度为40CM,与地面成60度
角的黑暗深洞取出,
并且球易碎,洞壁不光滑。
60o
400
100
一、了解机械手
1、机械手:
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
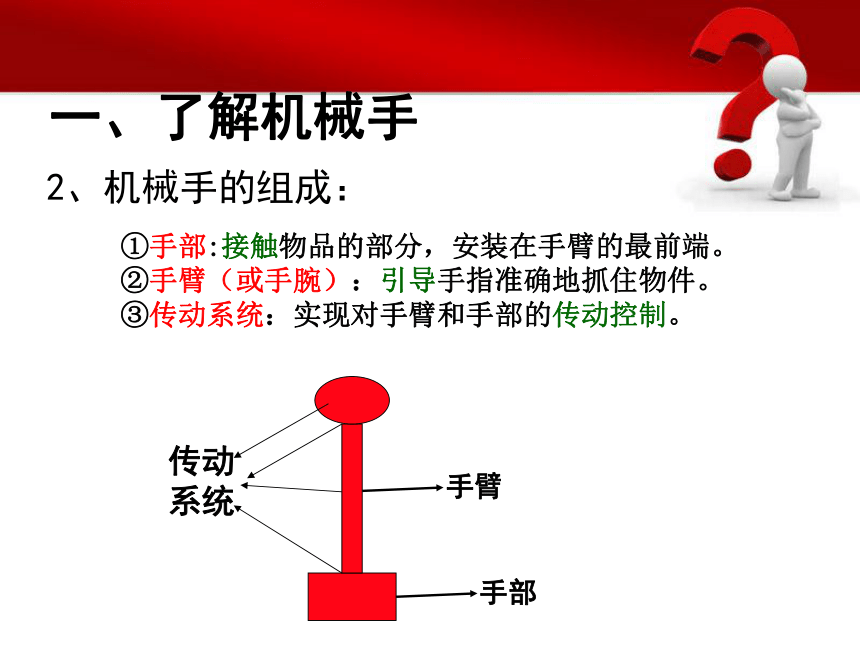
2、机械手的组成:
①手部:接触物品的部分,安装在手臂的最前端。
②手臂(或手腕):引导手指准确地抓住物件。
③传动系统:实现对手臂和手部的传动控制。
一、了解机械手
手部
手臂
传动
系统
二、发现与明确问题
1.发现问题
通过模拟情境,要将球取出存在哪些问题?
①洞深40CM,并有60度的倾斜角。
②球的问题——球在洞底的位置。
③距离问题——如何确定机械手已到达洞的底部。
二、发现与明确问题
2.明确问题
明确解决设计问题的条件和限制
机械手设计制作时间限制:
利用一节课完成制定设计方案,
3节课完成机械手的制作和调试。
机械手设计制作材料及工具限制:
塑料管 长度1.5米 胶带 一卷
10号铁丝 长度1.5米 铁钉 若干
14号铁丝 长度2米 塑料袋 一个
线绳 长度3米 针、线 若干
塑料球 直径6CM
工具名称 数量
直尺 1把
壁纸刀 1把
剪刀 1把
钳子 1把
锥子 1把
手锯 1把
机械手项目制作工具列表
三、制订设计方案
产品
设计
物
人
环境
设计分析
①洞深40CM,并有60度的倾斜角。
②球的问题——球在洞低的位置。
③距离问题——如何确定机械手到达洞的底部。
人机关系
人
1.易于控制,操作省力。
③距离问题——如何确定机械手到达洞的底部。
②球的问题——球在洞低的位置。
①洞深40CM,并有60度的倾斜角。
2.方便制作,难度小。
3.便于探知洞底部
手部
手臂
传动
系统
物
1.手部的形式:夹持型、托持型
③距离问题——如何确定机械手到达洞的底部。
②球的问题——球在洞低的位置。
①洞深40CM,并有60度的倾斜角。
2.传动形式:旋转、伸缩、抽拉等
3.球的受力程度。
4.不同位置的材料选择。
5.手、腕、臂等位置的连接方式。
6.产品原理简单,易于制作。
手部
手臂
传动
系统
环境
1.洞深40CM,并有60度倾斜角。
③距离问题——如何确定机械手到达洞的底部。
②球的问题——球在洞低的位置。
①洞深40CM,并有60度的倾斜角。
2.球的直径6CM,洞口直径10CM。
4.球与洞壁有无空隙。 (拿取的位置)
3.黑暗的深洞。 (看不见洞内情况)
60o
400
100
三、制订设计方案
——草图法
方案构思
三、制订设计方案
方案构思
——模仿法
三、制订设计方案
——联想法
方案构思
三、制订设计方案
——奇特构思法
方案构思
三、制订设计方案
机械手设计方案
学校: 班级: 姓名:
1.构思方法:(草图法、模仿法、联想法、奇特构思法)
2.手部形式: (夹持型、托持型、吸附型)
3.手部制作材料:
4.传动方式: (旋转、伸缩、抽拉等)
5.手臂制作材料:
6.草图: (有文字说明)
方案呈现
手部
手臂
传动
系统
四、机械手评价标准
1、过程性评价:
①设计方案数量。 (5/3/0)
②组内分工明确,每人都有制作内容。 (10/8/6)
③使用材料的种类。 (5/3)
2、总结性评价:
①如数上交所有发放的工具(无丢失、无损坏)。 (10/5)
②上交一份字迹工整,项目齐全的技术手册。 (10/8/6)
③作品数量。 (5/3)
④30秒内取球数量。 (5/3/0)
机械手设计制作
模拟情境:
将直径为6CM的球从直径10CM,
深度为40CM,与地面成60度
角的黑暗深洞取出,
并且球易碎,洞壁不光滑。
60o
400
100
一、了解机械手
1、机械手:
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、机械手的组成:
①手部:接触物品的部分,安装在手臂的最前端。
②手臂(或手腕):引导手指准确地抓住物件。
③传动系统:实现对手臂和手部的传动控制。
一、了解机械手
手部
手臂
传动
系统
二、发现与明确问题
1.发现问题
通过模拟情境,要将球取出存在哪些问题?
①洞深40CM,并有60度的倾斜角。
②球的问题——球在洞底的位置。
③距离问题——如何确定机械手已到达洞的底部。
二、发现与明确问题
2.明确问题
明确解决设计问题的条件和限制
机械手设计制作时间限制:
利用一节课完成制定设计方案,
3节课完成机械手的制作和调试。
机械手设计制作材料及工具限制:
塑料管 长度1.5米 胶带 一卷
10号铁丝 长度1.5米 铁钉 若干
14号铁丝 长度2米 塑料袋 一个
线绳 长度3米 针、线 若干
塑料球 直径6CM
工具名称 数量
直尺 1把
壁纸刀 1把
剪刀 1把
钳子 1把
锥子 1把
手锯 1把
机械手项目制作工具列表
三、制订设计方案
产品
设计
物
人
环境
设计分析
①洞深40CM,并有60度的倾斜角。
②球的问题——球在洞低的位置。
③距离问题——如何确定机械手到达洞的底部。
人机关系
人
1.易于控制,操作省力。
③距离问题——如何确定机械手到达洞的底部。
②球的问题——球在洞低的位置。
①洞深40CM,并有60度的倾斜角。
2.方便制作,难度小。
3.便于探知洞底部
手部
手臂
传动
系统
物
1.手部的形式:夹持型、托持型
③距离问题——如何确定机械手到达洞的底部。
②球的问题——球在洞低的位置。
①洞深40CM,并有60度的倾斜角。
2.传动形式:旋转、伸缩、抽拉等
3.球的受力程度。
4.不同位置的材料选择。
5.手、腕、臂等位置的连接方式。
6.产品原理简单,易于制作。
手部
手臂
传动
系统
环境
1.洞深40CM,并有60度倾斜角。
③距离问题——如何确定机械手到达洞的底部。
②球的问题——球在洞低的位置。
①洞深40CM,并有60度的倾斜角。
2.球的直径6CM,洞口直径10CM。
4.球与洞壁有无空隙。 (拿取的位置)
3.黑暗的深洞。 (看不见洞内情况)
60o
400
100
三、制订设计方案
——草图法
方案构思
三、制订设计方案
方案构思
——模仿法
三、制订设计方案
——联想法
方案构思
三、制订设计方案
——奇特构思法
方案构思
三、制订设计方案
机械手设计方案
学校: 班级: 姓名:
1.构思方法:(草图法、模仿法、联想法、奇特构思法)
2.手部形式: (夹持型、托持型、吸附型)
3.手部制作材料:
4.传动方式: (旋转、伸缩、抽拉等)
5.手臂制作材料:
6.草图: (有文字说明)
方案呈现
手部
手臂
传动
系统
四、机械手评价标准
1、过程性评价:
①设计方案数量。 (5/3/0)
②组内分工明确,每人都有制作内容。 (10/8/6)
③使用材料的种类。 (5/3)
2、总结性评价:
①如数上交所有发放的工具(无丢失、无损坏)。 (10/5)
②上交一份字迹工整,项目齐全的技术手册。 (10/8/6)
③作品数量。 (5/3)
④30秒内取球数量。 (5/3/0)