人教版物理八年级下册同步提优训练 12.1杠杆 第2课时 探究杠杆的平衡条件及平衡条件的应用(有答案)
文档属性
| 名称 | 人教版物理八年级下册同步提优训练 12.1杠杆 第2课时 探究杠杆的平衡条件及平衡条件的应用(有答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 136.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-03-28 00:00:00 | ||
图片预览
文档简介
第1节 杠杆
第2课时 探究杠杆的平衡条件及平衡条件的应用
1 探究杠杆的平衡条件
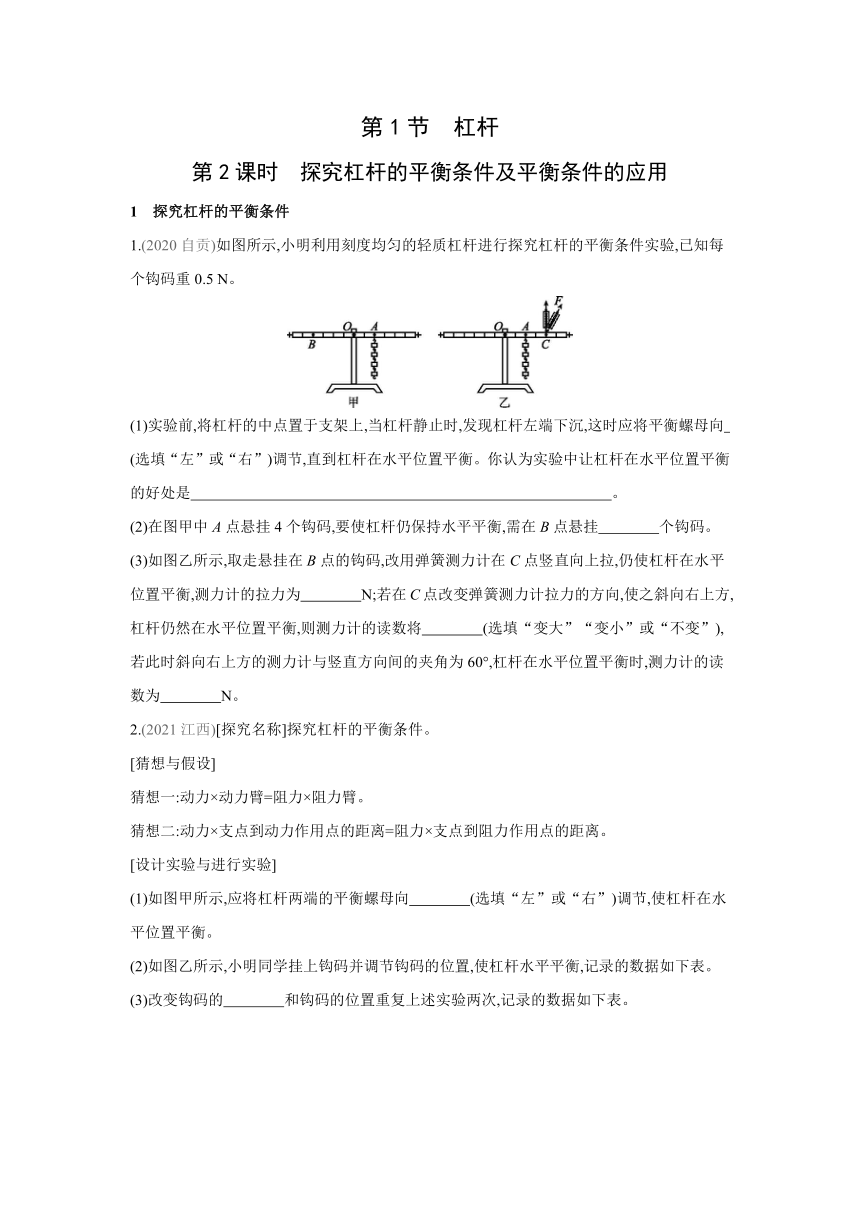
1.(2020自贡)如图所示,小明利用刻度均匀的轻质杠杆进行探究杠杆的平衡条件实验,已知每个钩码重0.5 N。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡。你认为实验中让杠杆在水平位置平衡的好处是 。
(2)在图甲中A点悬挂4个钩码,要使杠杆仍保持水平平衡,需在B点悬挂 个钩码。
(3)如图乙所示,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,仍使杠杆在水平位置平衡,测力计的拉力为 N;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然在水平位置平衡,则测力计的读数将 (选填“变大”“变小”或“不变”),若此时斜向右上方的测力计与竖直方向间的夹角为60°,杠杆在水平位置平衡时,测力计的读数为 N。
2.(2021江西)[探究名称]探究杠杆的平衡条件。
[猜想与假设]
猜想一:动力×动力臂=阻力×阻力臂。
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。
[设计实验与进行实验]
(1)如图甲所示,应将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如下表。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如下表。
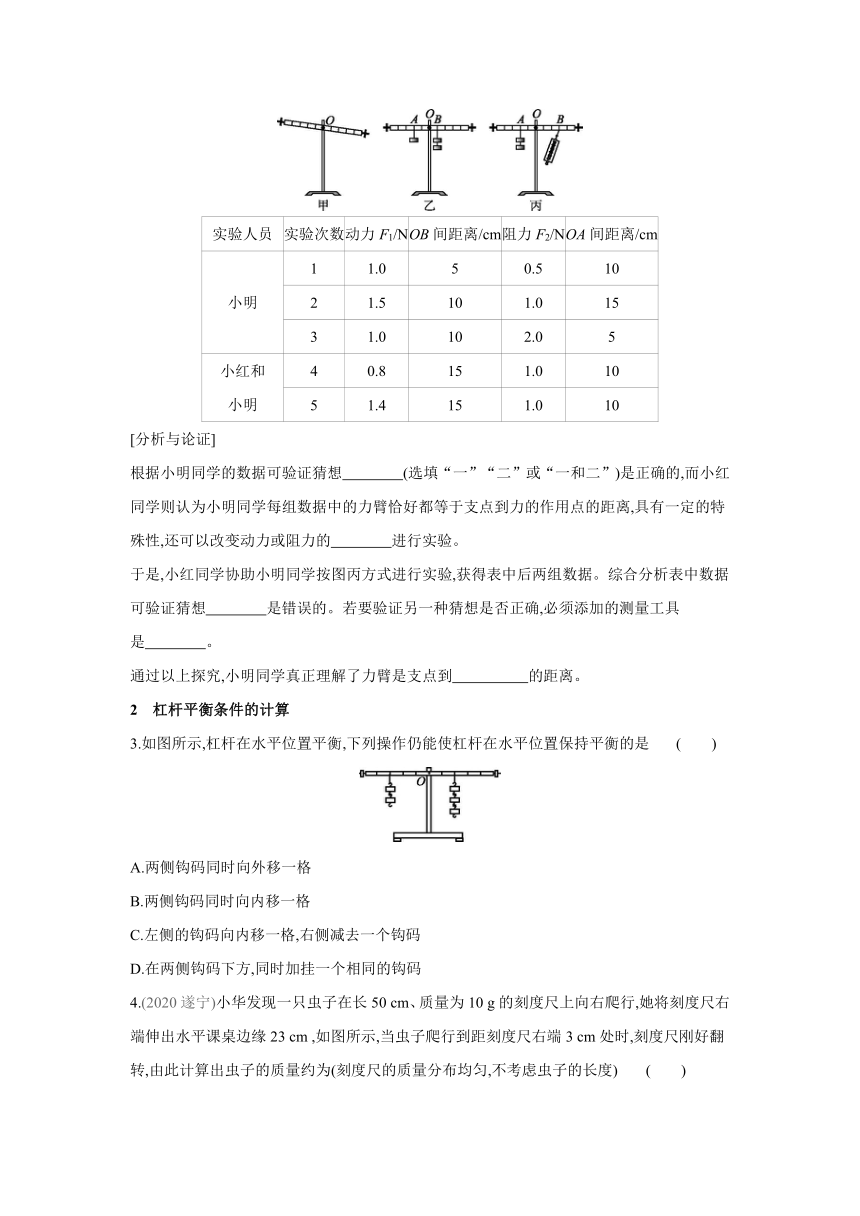
实验人员 实验次数 动力F1/N OB间距离/cm 阻力F2/N OA间距离/cm
小明 1 1.0 5 0.5 10
2 1.5 10 1.0 15
3 1.0 10 2.0 5
小红和 小明 4 0.8 15 1.0 10
5 1.4 15 1.0 10
[分析与论证]
根据小明同学的数据可验证猜想 (选填“一”“二”或“一和二”)是正确的,而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还可以改变动力或阻力的 进行实验。
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。
通过以上探究,小明同学真正理解了力臂是支点到 的距离。
2 杠杆平衡条件的计算
3.如图所示,杠杆在水平位置平衡,下列操作仍能使杠杆在水平位置保持平衡的是 ( )
A.两侧钩码同时向外移一格
B.两侧钩码同时向内移一格
C.左侧的钩码向内移一格,右侧减去一个钩码
D.在两侧钩码下方,同时加挂一个相同的钩码
4.(2020遂宁)小华发现一只虫子在长50 cm、质量为10 g的刻度尺上向右爬行,她将刻度尺右端伸出水平课桌边缘23 cm ,如图所示,当虫子爬行到距刻度尺右端3 cm处时,刻度尺刚好翻转,由此计算出虫子的质量约为(刻度尺的质量分布均匀,不考虑虫子的长度) ( )
A.1 g B.3 g
C.7 g D.10 g
5.(2021杭州改编)如图所示,甲、乙两人分别在A点和B点共同扛起一根木料做横向移动,已知该木料是质量分布均匀的圆柱体,质量为60 kg,体积为0.1 m3。此时木料恰好水平,其中AO=BO,O为木料的中点,以下说法中不正确的是(g取10 N/kg) ( )
A.木料的密度为0.6×103 kg/m3 B.此时乙对木料的作用力为300 N
C.当乙的作用点向O靠近时,F甲变小 D.此木料对于两人来说都是费力杠杆
6.一个杠杆处于平衡状态,动力臂与阻力臂之比为5∶1,则动力与阻力之比是 ,若此时杠杆受到的阻力是60 N,则杠杆受到的动力为 N。
7.汽车超载是当前发生交通事故的重要原因之一,全国各地设置了许多超载监测站加强监管。如图所示,一辆两轴货车正在水平地面上设置的某种电子地磅秤上称重。先让货车前轮单独开上电子地磅秤,其读数为8 t;前轮驶离电子地磅秤,再让后轮单独开上电子地磅秤,其读数为9 t。国家规定两轴货车限载车货总重18 t,请你通过计算分析该货车是否超载。
8.(2021南充)如图甲所示,AB为轻质杠杆,AC为轻质硬棒且与力传感器相连,图乙是物体M从A点开始向右匀速运动过程中力传感器读数大小与时间的关系图象,则物体M的质量大小为 g;已知OA的长度为30 cm,OB足够长,AC能承受的最大弹力大小为15 N,若要杆不断,物体M从A点开始运动的时间最长为 s。(g取10 N/kg)
第1节 杠杆
第2课时 探究杠杆的平衡条件及平衡条件的应用
1.(1)右 避免杠杆自重对实验的影响,便于测量力臂
(2)2 (3)1 变大 2
2.[设计实验与进行实验] (1)左 (3)数量
[分析与论证] 一和二 方向 二 三角板(刻度尺)
力的作用线
3.C 设一个钩码的重力为G,杠杆上一个格的长度为L,原来杠杆处于平衡状态,则有2G×3L=3G×2L。两侧钩码各向外移一格,左边力与力臂的乘积为2G×4L=8GL,右边力与力臂的乘积为3G×3L=9GL,8GL<9GL,杠杆右端下沉,故A错误;两侧钩码各向内移一格,左边力与力臂的乘积为2G×2L=4GL,右边力与力臂的乘积为3G×L=3GL,4GL>3GL,杠杆左端下沉,故B错误;左侧的钩码向内移一格,右侧减去一个钩码,左边力与力臂的乘积为2G×2L=4GL,右边力与力臂的乘积为2G×2L=4GL,4GL=4GL,杠杆平衡,故C正确;在两侧钩码下方,同时加挂一个相同的钩码,左边力与力臂的乘积为3G×3L=9GL,右边力与力臂的乘积为4G×2L=8GL,9GL>8GL,杠杆左端下沉,故D错误。
4.A 由题意可知,刻度尺的重心在25 cm处,刻度尺刚好翻转时与桌沿的接触点为支点,则刻度尺重力的力臂:l1=25 cm-23 cm=2 cm;
虫子重力的力臂:l2=23 cm-3 cm=20 cm;
由杠杆的平衡条件F1l1=F2l2及重力公式G=mg得:m尺g×l1=m虫g×l2,即m尺×l1=m虫×l2,
代入数据得10 g×2 cm=m虫×20 cm,解得m虫=1 g。
5.D (1)由题知木料质量为60 kg,体积为0.1 m3,代入密度公式得:
ρ===0.6×103 kg/m3。
(2)木料重力为G=mg=60 kg×10 N/kg=600 N;以A为支点,由杠杆平衡条件F1l1=F2l2得:
F乙×AB=G×AO,即F乙===300 N。
(3)当乙的作用点向O靠近时,此时作用点记为B';以A为支点,由杠杆平衡条件F1l1=F2l2得:F乙×AB'=G×AO,即F乙=;当乙向O点靠近,AB'减小,G与AO不变,则F乙变大;因为木料处于平衡状态,故所受合力为零,则有F乙+F甲=G;因F乙变大,所以F甲变小。
(4)相对于甲来说,支点在B点,动力的作用点在A点,阻力即木料的重力,作用点在O点,所以动力臂大于阻力臂,为省力杠杆,对于乙也一样。
6.1∶5 12 杠杆的动力臂与阻力臂之比为5∶1,
根据杠杆的平衡条件有==,
此杠杆受到的阻力F2=60 N,根据杠杆的平衡条件可得,
F1×5=60 N×1,
解得F1=12 N。
7.货车前轮开上地磅秤时,以后轮为支点,如图甲所示,
根据杠杆的平衡条件得,
F前l=G车l1①,
货车后轮开上地磅秤时,以前轮为支点,如图乙所示,
根据杠杆的平衡条件得,
F后l=G车l1'②,
①+②,得G车=F前+F后,
依题意G车=G前+G后,
则m车=m前+m后=8 t+9 t=17 t<18 t,
所以货车没有超载。
8.1000 12.5
(1)由图甲知,当M在A点时,对传感器的压力大小等于物体的重力,由图乙知,物体的重力:G=10 N,则物体的质量:m===1 kg=1000 g。
(2)当M运动到支点O时,对传感器的压力为0,由图乙知,此时t=5 s,所以物体M的速度:v===6 cm/s。由图乙知,当传感器的拉力为15 N时,M应在支点O的右侧,此时距离支点距离为L,根据杠杆的平衡条件:F传·lOA=G·L,
则L===45 cm;
物体M从A点开始运动的路程:s=30 cm+45 cm=75 cm;运动的时间:t===12.5 s,故最长运动时间为12.5 s。
第2课时 探究杠杆的平衡条件及平衡条件的应用
1 探究杠杆的平衡条件
1.(2020自贡)如图所示,小明利用刻度均匀的轻质杠杆进行探究杠杆的平衡条件实验,已知每个钩码重0.5 N。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡。你认为实验中让杠杆在水平位置平衡的好处是 。
(2)在图甲中A点悬挂4个钩码,要使杠杆仍保持水平平衡,需在B点悬挂 个钩码。
(3)如图乙所示,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,仍使杠杆在水平位置平衡,测力计的拉力为 N;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然在水平位置平衡,则测力计的读数将 (选填“变大”“变小”或“不变”),若此时斜向右上方的测力计与竖直方向间的夹角为60°,杠杆在水平位置平衡时,测力计的读数为 N。
2.(2021江西)[探究名称]探究杠杆的平衡条件。
[猜想与假设]
猜想一:动力×动力臂=阻力×阻力臂。
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。
[设计实验与进行实验]
(1)如图甲所示,应将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如下表。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如下表。
实验人员 实验次数 动力F1/N OB间距离/cm 阻力F2/N OA间距离/cm
小明 1 1.0 5 0.5 10
2 1.5 10 1.0 15
3 1.0 10 2.0 5
小红和 小明 4 0.8 15 1.0 10
5 1.4 15 1.0 10
[分析与论证]
根据小明同学的数据可验证猜想 (选填“一”“二”或“一和二”)是正确的,而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还可以改变动力或阻力的 进行实验。
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。
通过以上探究,小明同学真正理解了力臂是支点到 的距离。
2 杠杆平衡条件的计算
3.如图所示,杠杆在水平位置平衡,下列操作仍能使杠杆在水平位置保持平衡的是 ( )
A.两侧钩码同时向外移一格
B.两侧钩码同时向内移一格
C.左侧的钩码向内移一格,右侧减去一个钩码
D.在两侧钩码下方,同时加挂一个相同的钩码
4.(2020遂宁)小华发现一只虫子在长50 cm、质量为10 g的刻度尺上向右爬行,她将刻度尺右端伸出水平课桌边缘23 cm ,如图所示,当虫子爬行到距刻度尺右端3 cm处时,刻度尺刚好翻转,由此计算出虫子的质量约为(刻度尺的质量分布均匀,不考虑虫子的长度) ( )
A.1 g B.3 g
C.7 g D.10 g
5.(2021杭州改编)如图所示,甲、乙两人分别在A点和B点共同扛起一根木料做横向移动,已知该木料是质量分布均匀的圆柱体,质量为60 kg,体积为0.1 m3。此时木料恰好水平,其中AO=BO,O为木料的中点,以下说法中不正确的是(g取10 N/kg) ( )
A.木料的密度为0.6×103 kg/m3 B.此时乙对木料的作用力为300 N
C.当乙的作用点向O靠近时,F甲变小 D.此木料对于两人来说都是费力杠杆
6.一个杠杆处于平衡状态,动力臂与阻力臂之比为5∶1,则动力与阻力之比是 ,若此时杠杆受到的阻力是60 N,则杠杆受到的动力为 N。
7.汽车超载是当前发生交通事故的重要原因之一,全国各地设置了许多超载监测站加强监管。如图所示,一辆两轴货车正在水平地面上设置的某种电子地磅秤上称重。先让货车前轮单独开上电子地磅秤,其读数为8 t;前轮驶离电子地磅秤,再让后轮单独开上电子地磅秤,其读数为9 t。国家规定两轴货车限载车货总重18 t,请你通过计算分析该货车是否超载。
8.(2021南充)如图甲所示,AB为轻质杠杆,AC为轻质硬棒且与力传感器相连,图乙是物体M从A点开始向右匀速运动过程中力传感器读数大小与时间的关系图象,则物体M的质量大小为 g;已知OA的长度为30 cm,OB足够长,AC能承受的最大弹力大小为15 N,若要杆不断,物体M从A点开始运动的时间最长为 s。(g取10 N/kg)
第1节 杠杆
第2课时 探究杠杆的平衡条件及平衡条件的应用
1.(1)右 避免杠杆自重对实验的影响,便于测量力臂
(2)2 (3)1 变大 2
2.[设计实验与进行实验] (1)左 (3)数量
[分析与论证] 一和二 方向 二 三角板(刻度尺)
力的作用线
3.C 设一个钩码的重力为G,杠杆上一个格的长度为L,原来杠杆处于平衡状态,则有2G×3L=3G×2L。两侧钩码各向外移一格,左边力与力臂的乘积为2G×4L=8GL,右边力与力臂的乘积为3G×3L=9GL,8GL<9GL,杠杆右端下沉,故A错误;两侧钩码各向内移一格,左边力与力臂的乘积为2G×2L=4GL,右边力与力臂的乘积为3G×L=3GL,4GL>3GL,杠杆左端下沉,故B错误;左侧的钩码向内移一格,右侧减去一个钩码,左边力与力臂的乘积为2G×2L=4GL,右边力与力臂的乘积为2G×2L=4GL,4GL=4GL,杠杆平衡,故C正确;在两侧钩码下方,同时加挂一个相同的钩码,左边力与力臂的乘积为3G×3L=9GL,右边力与力臂的乘积为4G×2L=8GL,9GL>8GL,杠杆左端下沉,故D错误。
4.A 由题意可知,刻度尺的重心在25 cm处,刻度尺刚好翻转时与桌沿的接触点为支点,则刻度尺重力的力臂:l1=25 cm-23 cm=2 cm;
虫子重力的力臂:l2=23 cm-3 cm=20 cm;
由杠杆的平衡条件F1l1=F2l2及重力公式G=mg得:m尺g×l1=m虫g×l2,即m尺×l1=m虫×l2,
代入数据得10 g×2 cm=m虫×20 cm,解得m虫=1 g。
5.D (1)由题知木料质量为60 kg,体积为0.1 m3,代入密度公式得:
ρ===0.6×103 kg/m3。
(2)木料重力为G=mg=60 kg×10 N/kg=600 N;以A为支点,由杠杆平衡条件F1l1=F2l2得:
F乙×AB=G×AO,即F乙===300 N。
(3)当乙的作用点向O靠近时,此时作用点记为B';以A为支点,由杠杆平衡条件F1l1=F2l2得:F乙×AB'=G×AO,即F乙=;当乙向O点靠近,AB'减小,G与AO不变,则F乙变大;因为木料处于平衡状态,故所受合力为零,则有F乙+F甲=G;因F乙变大,所以F甲变小。
(4)相对于甲来说,支点在B点,动力的作用点在A点,阻力即木料的重力,作用点在O点,所以动力臂大于阻力臂,为省力杠杆,对于乙也一样。
6.1∶5 12 杠杆的动力臂与阻力臂之比为5∶1,
根据杠杆的平衡条件有==,
此杠杆受到的阻力F2=60 N,根据杠杆的平衡条件可得,
F1×5=60 N×1,
解得F1=12 N。
7.货车前轮开上地磅秤时,以后轮为支点,如图甲所示,
根据杠杆的平衡条件得,
F前l=G车l1①,
货车后轮开上地磅秤时,以前轮为支点,如图乙所示,
根据杠杆的平衡条件得,
F后l=G车l1'②,
①+②,得G车=F前+F后,
依题意G车=G前+G后,
则m车=m前+m后=8 t+9 t=17 t<18 t,
所以货车没有超载。
8.1000 12.5
(1)由图甲知,当M在A点时,对传感器的压力大小等于物体的重力,由图乙知,物体的重力:G=10 N,则物体的质量:m===1 kg=1000 g。
(2)当M运动到支点O时,对传感器的压力为0,由图乙知,此时t=5 s,所以物体M的速度:v===6 cm/s。由图乙知,当传感器的拉力为15 N时,M应在支点O的右侧,此时距离支点距离为L,根据杠杆的平衡条件:F传·lOA=G·L,
则L===45 cm;
物体M从A点开始运动的路程:s=30 cm+45 cm=75 cm;运动的时间:t===12.5 s,故最长运动时间为12.5 s。