人教版物理八年级下册同步提优训练 第十二章 简单机械 单元复习(有答案)
文档属性
| 名称 | 人教版物理八年级下册同步提优训练 第十二章 简单机械 单元复习(有答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 231.3KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-03-28 00:00:00 | ||
图片预览
文档简介
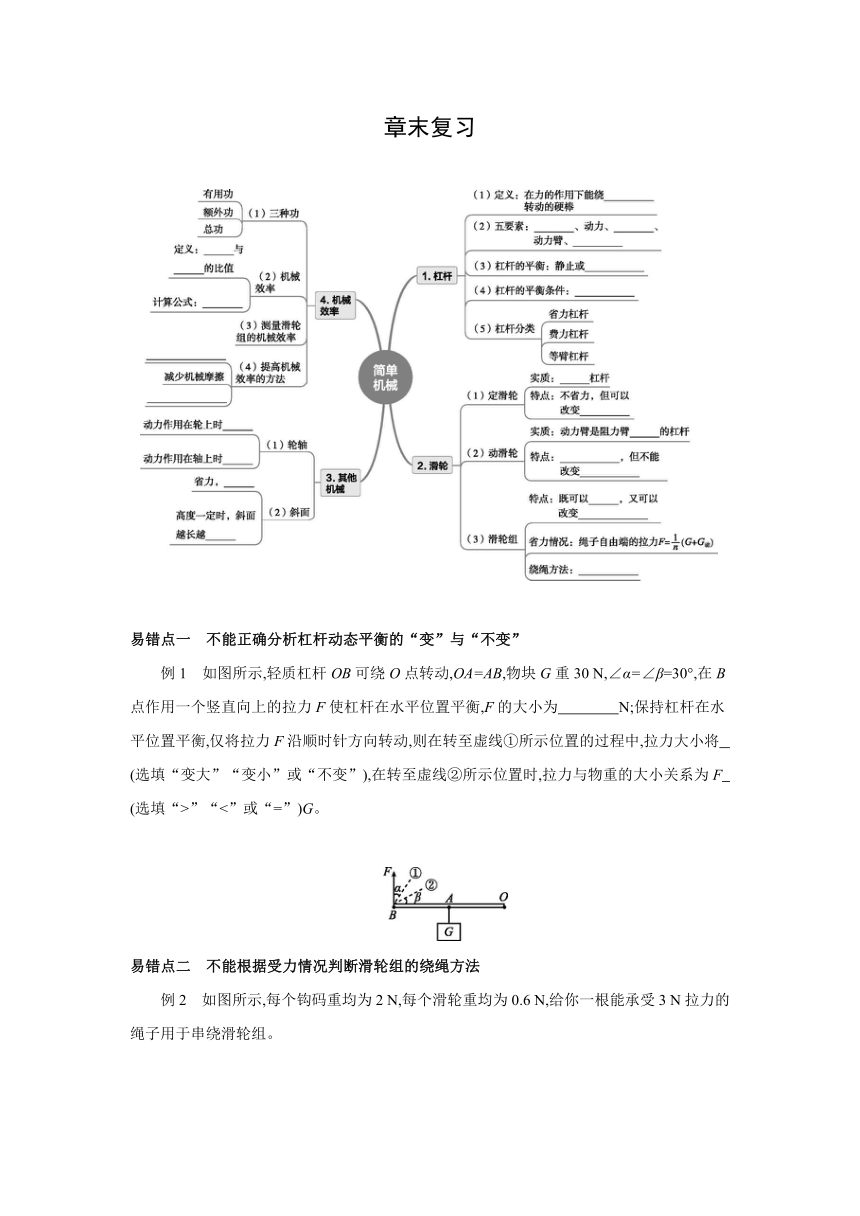
章末复习
易错点一 不能正确分析杠杆动态平衡的“变”与“不变”
例1 如图所示,轻质杠杆OB可绕O点转动,OA=AB,物块G重30 N,∠α=∠β=30°,在B点作用一个竖直向上的拉力F使杠杆在水平位置平衡,F的大小为 N;保持杠杆在水平位置平衡,仅将拉力F沿顺时针方向转动,则在转至虚线①所示位置的过程中,拉力大小将 (选填“变大”“变小”或“不变”),在转至虚线②所示位置时,拉力与物重的大小关系为F (选填“>”“<”或“=”)G。
易错点二 不能根据受力情况判断滑轮组的绕绳方法
例2 如图所示,每个钩码重均为2 N,每个滑轮重均为0.6 N,给你一根能承受3 N拉力的绳子用于串绕滑轮组。
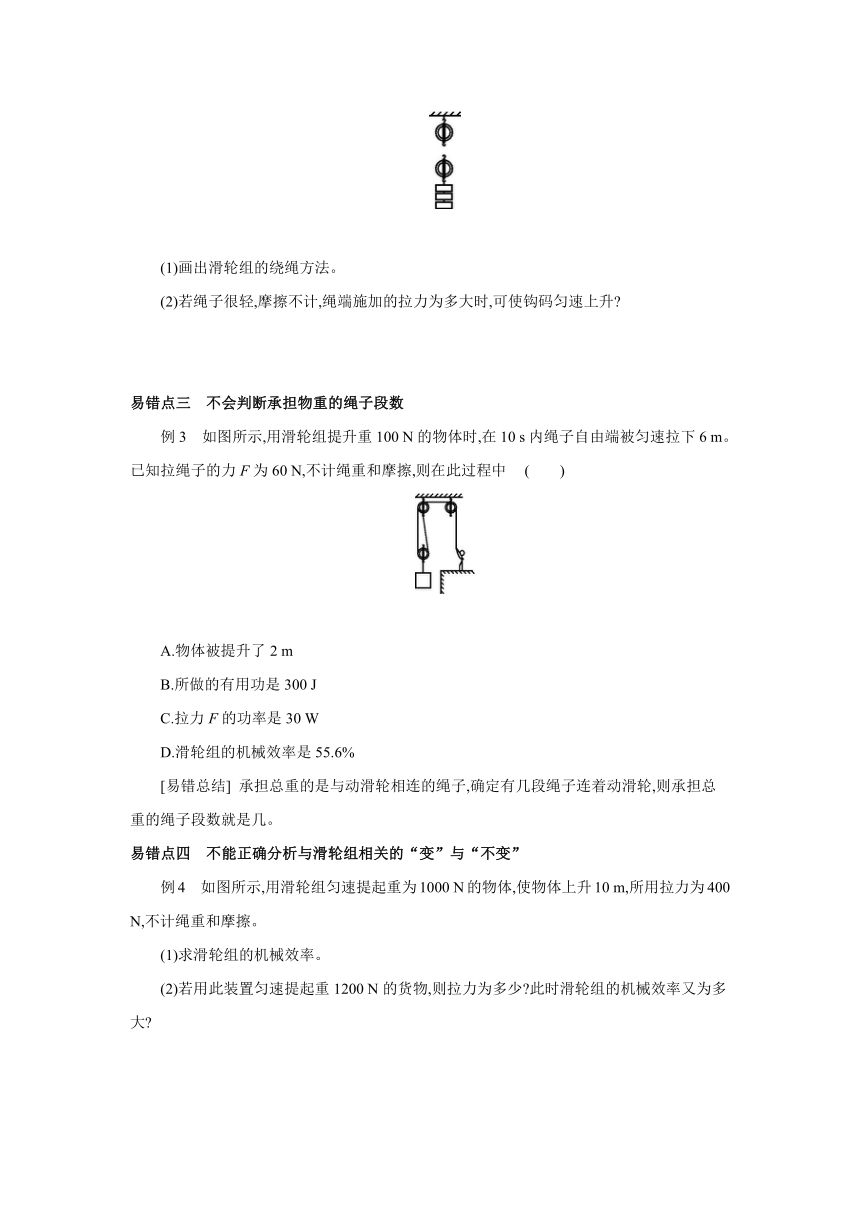
(1)画出滑轮组的绕绳方法。
(2)若绳子很轻,摩擦不计,绳端施加的拉力为多大时,可使钩码匀速上升
易错点三 不会判断承担物重的绳子段数
例3 如图所示,用滑轮组提升重100 N的物体时,在10 s内绳子自由端被匀速拉下6 m。已知拉绳子的力F为60 N,不计绳重和摩擦,则在此过程中 ( )
A.物体被提升了2 m
B.所做的有用功是300 J
C.拉力F的功率是30 W
D.滑轮组的机械效率是55.6%
[易错总结] 承担总重的是与动滑轮相连的绳子,确定有几段绳子连着动滑轮,则承担总重的绳子段数就是几。
易错点四 不能正确分析与滑轮组相关的“变”与“不变”
例4 如图所示,用滑轮组匀速提起重为1000 N的物体,使物体上升10 m,所用拉力为400 N,不计绳重和摩擦。
(1)求滑轮组的机械效率。
(2)若用此装置匀速提起重1200 N的货物,则拉力为多少 此时滑轮组的机械效率又为多大
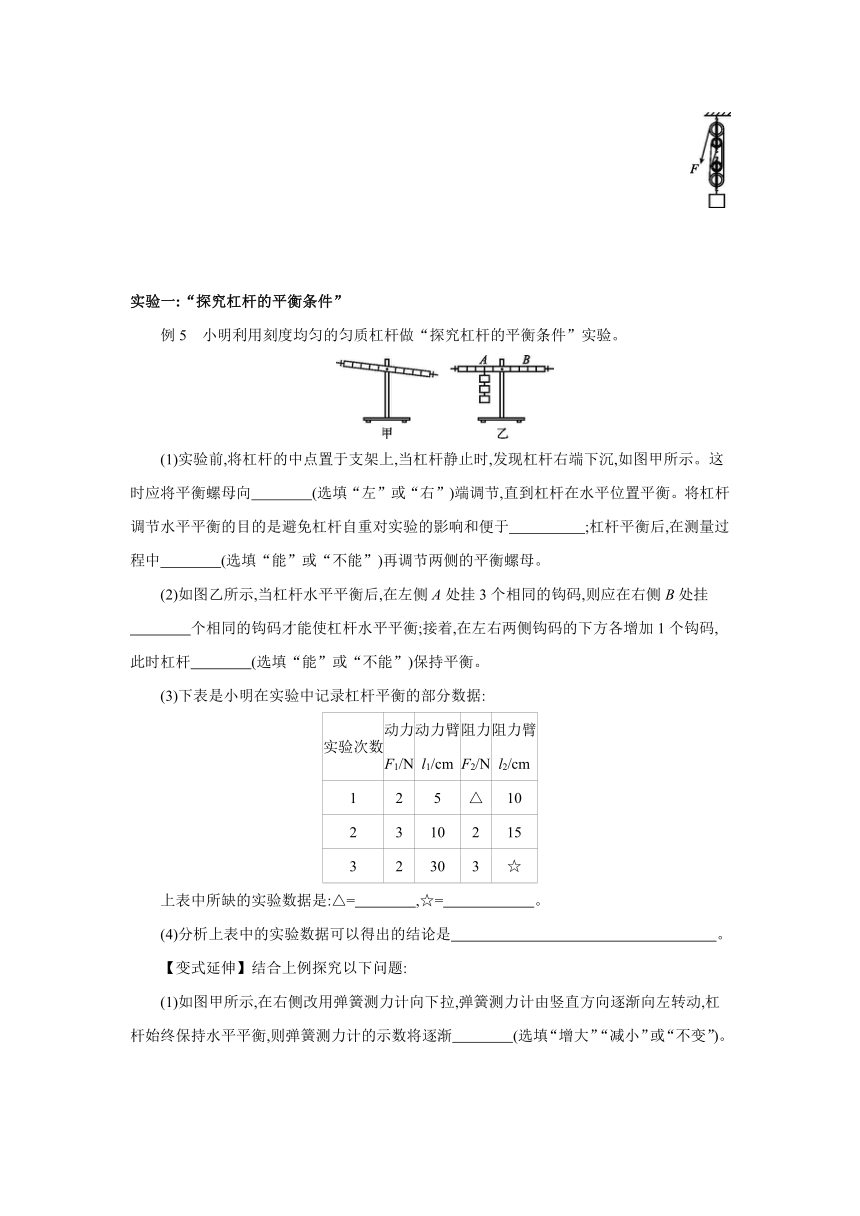
实验一:“探究杠杆的平衡条件”
例5 小明利用刻度均匀的匀质杠杆做“探究杠杆的平衡条件”实验。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,如图甲所示。这时应将平衡螺母向 (选填“左”或“右”)端调节,直到杠杆在水平位置平衡。将杠杆调节水平平衡的目的是避免杠杆自重对实验的影响和便于 ;杠杆平衡后,在测量过程中 (选填“能”或“不能”)再调节两侧的平衡螺母。
(2)如图乙所示,当杠杆水平平衡后,在左侧A处挂3个相同的钩码,则应在右侧B处挂
个相同的钩码才能使杠杆水平平衡;接着,在左右两侧钩码的下方各增加1个钩码,此时杠杆 (选填“能”或“不能”)保持平衡。
(3)下表是小明在实验中记录杠杆平衡的部分数据:
实验次数 动力 F1/N 动力臂 l1/cm 阻力 F2/N 阻力臂 l2/cm
1 2 5 △ 10
2 3 10 2 15
3 2 30 3 ☆
上表中所缺的实验数据是:△= ,☆= 。
(4)分析上表中的实验数据可以得出的结论是 。
【变式延伸】结合上例探究以下问题:
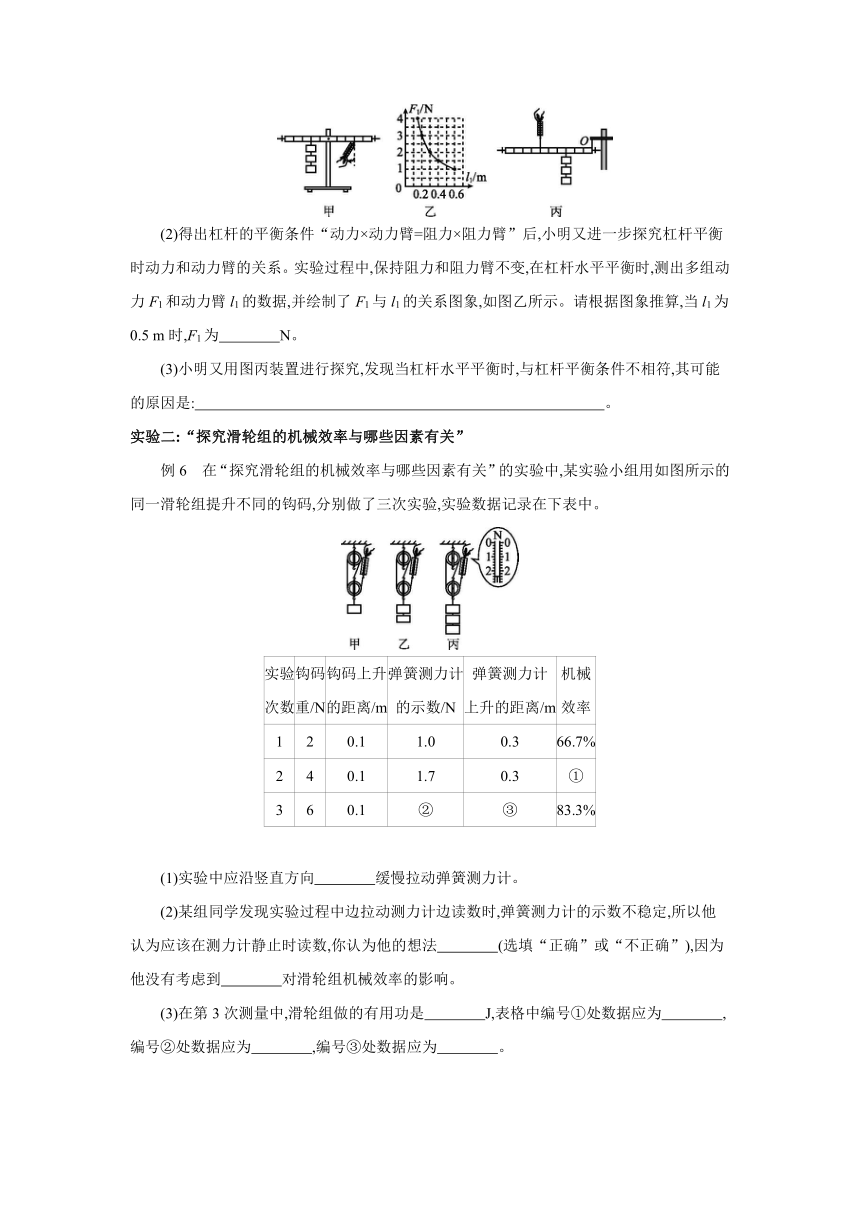
(1)如图甲所示,在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (选填“增大”“减小”或“不变”)。
(2)得出杠杆的平衡条件“动力×动力臂=阻力×阻力臂”后,小明又进一步探究杠杆平衡时动力和动力臂的关系。实验过程中,保持阻力和阻力臂不变,在杠杆水平平衡时,测出多组动力F1和动力臂l1的数据,并绘制了F1与l1的关系图象,如图乙所示。请根据图象推算,当l1为0.5 m时,F1为 N。
(3)小明又用图丙装置进行探究,发现当杠杆水平平衡时,与杠杆平衡条件不相符,其可能的原因是: 。
实验二:“探究滑轮组的机械效率与哪些因素有关”
例6 在“探究滑轮组的机械效率与哪些因素有关”的实验中,某实验小组用如图所示的同一滑轮组提升不同的钩码,分别做了三次实验,实验数据记录在下表中。
实验 次数 钩码 重/N 钩码上升 的距离/m 弹簧测力计 的示数/N 弹簧测力计 上升的距离/m 机械 效率
1 2 0.1 1.0 0.3 66.7%
2 4 0.1 1.7 0.3 ①
3 6 0.1 ② ③ 83.3%
(1)实验中应沿竖直方向 缓慢拉动弹簧测力计。
(2)某组同学发现实验过程中边拉动测力计边读数时,弹簧测力计的示数不稳定,所以他认为应该在测力计静止时读数,你认为他的想法 (选填“正确”或“不正确”),因为他没有考虑到 对滑轮组机械效率的影响。
(3)在第3次测量中,滑轮组做的有用功是 J,表格中编号①处数据应为 ,编号②处数据应为 ,编号③处数据应为 。
(4)分析表中数据可得出结论:同一滑轮组,提升钩码越重,机械效率越 (选填“高”或“低”)。
【变式延伸】结合上例探究以下问题:
该实验小组完成上述实验后,又进行了一组实验得到的数据如下表所示,各次实验的装置分别如图甲、乙、丙、丁所示。
实验 次数 钩码 重/N 钩码上升 的距离/m 弹簧测力计 的示数/N 弹簧测力计 上升的距离/m 机械 效率
4 4 0.1 2.7 0.2 74%
5 4 0.1 1.8 0.3 74%
6 8 0.1 3.1 0.3 86%
7 8 0.1 2.5
(1)用图丁装置进行实验,得出表中第7次实验的数据,请将表中的两个数据填写完整。
(2)通过比较 (填实验次数的序号)两次实验数据得出结论:使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子的绕线方式无关。
(3)通过比较6、7两次实验数据可得出结论: 。
答案
[思维导图建构]
1.(1)固定点O (2)支点 阻力 阻力臂
(3)匀速转动 (4)F1l1=F2l2
2.(1)等臂 力的方向 (2)2倍 省力 力的方向
(3)省力 力的方向 “奇动偶定”
3.(1)省力 费力 (2)费距离 省力
4.(2)有用功 总功 η=
(4)减小机械自重 增大被提升物体的重力
[易错考点专训]
例1 15 变大 =
[解析] 由杠杆平衡条件可得:F×OB=G×OA,已知OB=2OA,解得,F====15 N。保持杠杆在水平位置平衡,仅将拉力F沿顺时针方向转动,在转至①位置时,拉力的力臂变小,但阻力与阻力臂不变,由杠杆的平衡条件可知:拉力变大。转至虚线②所示位置时,由“30°角所对的直角边是斜边的一半”可知:动力臂为OB,由杠杆平衡条件可得F×OB=G×OA,即:F×OB=G×OB,化简得F=G。
例2 (1) 如图所示
(2)绳端施加的拉力:F=(G+G动)=×(6 N+0.6 N)=2.2 N。
例3 B [解析] 由图可知:承担动滑轮和物体总重的绳子段数n=2,则物体被提升的高度:h=s=×6 m=3 m,故A错误;有用功W有=Gh=100 N×3 m=300 J,故B正确;拉力做的总功:
W总=Fs=60 N×6 m=360 J,拉力做功的功率:P===36 W,故C错误;滑轮组的机械效率: η==≈0.833=83.3%,故D错误。
例4 (1)由图可知:n=4,
绳子自由端移动的距离:s=nh=4×10 m=40 m,
有用功:W有=Gh=1000 N×10 m=10000 J,
总功:W总=Fs=400 N×40 m=16000 J
滑轮组的机械效率:η===0.625=62.5%。
(2)已知绳重和摩擦不计,则F=(G+G动),即:
400 N=×(1000 N+G动),
解得G动=600 N。
用此装置匀速提起重1200 N的货物,
此时的拉力:F'=(G'+G动)=×(1200 N+600 N)=450 N。
此时滑轮组的机械效率:
η'====≈0.667=66.7%。
[重点实验突破]
例5 (1)左 测量力臂 不能 (2)2 不能 (3)1 20
(4)F1l1=F2l2(或动力×动力臂=阻力×阻力臂)
【变式延伸】
(1)增大 (2)1.2 (3)杠杆自重对杠杆平衡有影响
例6 (1)匀速 (2)不正确 摩擦
(3)0.6 78.4% 2.4 0.3 (4)高
[解析] (1)实验中应沿竖直方向匀速缓慢拉动弹簧测力计,此时弹簧测力计的示数才等于拉力的大小。
(2)在弹簧测力计静止时读出了数据,由于不会克服轮与轴、绳与轮之间的摩擦,将导致弹簧测力计的示数偏小,故他的想法是不正确的。
(3)在第3次测量中,滑轮组做的有用功:W有=Gh=6 N×0.1 m=0.6 J;根据表格中第2次测量数据可知,滑轮组的机械效率:η2===≈0.784=78.4%;由图丙可知:弹簧测力计的分度值为0.2 N,故其示数为2.4 N,由于n=3,则弹簧测力计上升的距离为s'=nh'=3×0.1 m=0.3 m。
(4)比较三次实验数据可知:相同的滑轮组提起的物体越重,其机械效率越高。
【变式延伸】
(1)0.4 80% (2)4、5
(3)不同滑轮组提升相同重物时,动滑轮越重,滑轮组的机械效率越低
[解析] (1)图丁中, n=4,则绳端移动距离:s=nh=4×0.1 m=0.4 m,故滑轮组的机械效率:η====0.8=80%。
(2)为了得出“使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子绕线方式无关”的结论,根据控制变量法,则要控制提升物体的重力、滑轮个数相同,只改变绳子的绕线方式,故应比较4、5两次实验数据。
(3)通过比较6、7两次实验数据,滑轮组不同,提升的重物相同,动滑轮越重,机械效率越低,故可得出结论:不同滑轮组提升相同重物时,动滑轮越重,滑轮组的机械效率越低。
易错点一 不能正确分析杠杆动态平衡的“变”与“不变”
例1 如图所示,轻质杠杆OB可绕O点转动,OA=AB,物块G重30 N,∠α=∠β=30°,在B点作用一个竖直向上的拉力F使杠杆在水平位置平衡,F的大小为 N;保持杠杆在水平位置平衡,仅将拉力F沿顺时针方向转动,则在转至虚线①所示位置的过程中,拉力大小将 (选填“变大”“变小”或“不变”),在转至虚线②所示位置时,拉力与物重的大小关系为F (选填“>”“<”或“=”)G。
易错点二 不能根据受力情况判断滑轮组的绕绳方法
例2 如图所示,每个钩码重均为2 N,每个滑轮重均为0.6 N,给你一根能承受3 N拉力的绳子用于串绕滑轮组。
(1)画出滑轮组的绕绳方法。
(2)若绳子很轻,摩擦不计,绳端施加的拉力为多大时,可使钩码匀速上升
易错点三 不会判断承担物重的绳子段数
例3 如图所示,用滑轮组提升重100 N的物体时,在10 s内绳子自由端被匀速拉下6 m。已知拉绳子的力F为60 N,不计绳重和摩擦,则在此过程中 ( )
A.物体被提升了2 m
B.所做的有用功是300 J
C.拉力F的功率是30 W
D.滑轮组的机械效率是55.6%
[易错总结] 承担总重的是与动滑轮相连的绳子,确定有几段绳子连着动滑轮,则承担总重的绳子段数就是几。
易错点四 不能正确分析与滑轮组相关的“变”与“不变”
例4 如图所示,用滑轮组匀速提起重为1000 N的物体,使物体上升10 m,所用拉力为400 N,不计绳重和摩擦。
(1)求滑轮组的机械效率。
(2)若用此装置匀速提起重1200 N的货物,则拉力为多少 此时滑轮组的机械效率又为多大
实验一:“探究杠杆的平衡条件”
例5 小明利用刻度均匀的匀质杠杆做“探究杠杆的平衡条件”实验。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,如图甲所示。这时应将平衡螺母向 (选填“左”或“右”)端调节,直到杠杆在水平位置平衡。将杠杆调节水平平衡的目的是避免杠杆自重对实验的影响和便于 ;杠杆平衡后,在测量过程中 (选填“能”或“不能”)再调节两侧的平衡螺母。
(2)如图乙所示,当杠杆水平平衡后,在左侧A处挂3个相同的钩码,则应在右侧B处挂
个相同的钩码才能使杠杆水平平衡;接着,在左右两侧钩码的下方各增加1个钩码,此时杠杆 (选填“能”或“不能”)保持平衡。
(3)下表是小明在实验中记录杠杆平衡的部分数据:
实验次数 动力 F1/N 动力臂 l1/cm 阻力 F2/N 阻力臂 l2/cm
1 2 5 △ 10
2 3 10 2 15
3 2 30 3 ☆
上表中所缺的实验数据是:△= ,☆= 。
(4)分析上表中的实验数据可以得出的结论是 。
【变式延伸】结合上例探究以下问题:
(1)如图甲所示,在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (选填“增大”“减小”或“不变”)。
(2)得出杠杆的平衡条件“动力×动力臂=阻力×阻力臂”后,小明又进一步探究杠杆平衡时动力和动力臂的关系。实验过程中,保持阻力和阻力臂不变,在杠杆水平平衡时,测出多组动力F1和动力臂l1的数据,并绘制了F1与l1的关系图象,如图乙所示。请根据图象推算,当l1为0.5 m时,F1为 N。
(3)小明又用图丙装置进行探究,发现当杠杆水平平衡时,与杠杆平衡条件不相符,其可能的原因是: 。
实验二:“探究滑轮组的机械效率与哪些因素有关”
例6 在“探究滑轮组的机械效率与哪些因素有关”的实验中,某实验小组用如图所示的同一滑轮组提升不同的钩码,分别做了三次实验,实验数据记录在下表中。
实验 次数 钩码 重/N 钩码上升 的距离/m 弹簧测力计 的示数/N 弹簧测力计 上升的距离/m 机械 效率
1 2 0.1 1.0 0.3 66.7%
2 4 0.1 1.7 0.3 ①
3 6 0.1 ② ③ 83.3%
(1)实验中应沿竖直方向 缓慢拉动弹簧测力计。
(2)某组同学发现实验过程中边拉动测力计边读数时,弹簧测力计的示数不稳定,所以他认为应该在测力计静止时读数,你认为他的想法 (选填“正确”或“不正确”),因为他没有考虑到 对滑轮组机械效率的影响。
(3)在第3次测量中,滑轮组做的有用功是 J,表格中编号①处数据应为 ,编号②处数据应为 ,编号③处数据应为 。
(4)分析表中数据可得出结论:同一滑轮组,提升钩码越重,机械效率越 (选填“高”或“低”)。
【变式延伸】结合上例探究以下问题:
该实验小组完成上述实验后,又进行了一组实验得到的数据如下表所示,各次实验的装置分别如图甲、乙、丙、丁所示。
实验 次数 钩码 重/N 钩码上升 的距离/m 弹簧测力计 的示数/N 弹簧测力计 上升的距离/m 机械 效率
4 4 0.1 2.7 0.2 74%
5 4 0.1 1.8 0.3 74%
6 8 0.1 3.1 0.3 86%
7 8 0.1 2.5
(1)用图丁装置进行实验,得出表中第7次实验的数据,请将表中的两个数据填写完整。
(2)通过比较 (填实验次数的序号)两次实验数据得出结论:使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子的绕线方式无关。
(3)通过比较6、7两次实验数据可得出结论: 。
答案
[思维导图建构]
1.(1)固定点O (2)支点 阻力 阻力臂
(3)匀速转动 (4)F1l1=F2l2
2.(1)等臂 力的方向 (2)2倍 省力 力的方向
(3)省力 力的方向 “奇动偶定”
3.(1)省力 费力 (2)费距离 省力
4.(2)有用功 总功 η=
(4)减小机械自重 增大被提升物体的重力
[易错考点专训]
例1 15 变大 =
[解析] 由杠杆平衡条件可得:F×OB=G×OA,已知OB=2OA,解得,F====15 N。保持杠杆在水平位置平衡,仅将拉力F沿顺时针方向转动,在转至①位置时,拉力的力臂变小,但阻力与阻力臂不变,由杠杆的平衡条件可知:拉力变大。转至虚线②所示位置时,由“30°角所对的直角边是斜边的一半”可知:动力臂为OB,由杠杆平衡条件可得F×OB=G×OA,即:F×OB=G×OB,化简得F=G。
例2 (1) 如图所示
(2)绳端施加的拉力:F=(G+G动)=×(6 N+0.6 N)=2.2 N。
例3 B [解析] 由图可知:承担动滑轮和物体总重的绳子段数n=2,则物体被提升的高度:h=s=×6 m=3 m,故A错误;有用功W有=Gh=100 N×3 m=300 J,故B正确;拉力做的总功:
W总=Fs=60 N×6 m=360 J,拉力做功的功率:P===36 W,故C错误;滑轮组的机械效率: η==≈0.833=83.3%,故D错误。
例4 (1)由图可知:n=4,
绳子自由端移动的距离:s=nh=4×10 m=40 m,
有用功:W有=Gh=1000 N×10 m=10000 J,
总功:W总=Fs=400 N×40 m=16000 J
滑轮组的机械效率:η===0.625=62.5%。
(2)已知绳重和摩擦不计,则F=(G+G动),即:
400 N=×(1000 N+G动),
解得G动=600 N。
用此装置匀速提起重1200 N的货物,
此时的拉力:F'=(G'+G动)=×(1200 N+600 N)=450 N。
此时滑轮组的机械效率:
η'====≈0.667=66.7%。
[重点实验突破]
例5 (1)左 测量力臂 不能 (2)2 不能 (3)1 20
(4)F1l1=F2l2(或动力×动力臂=阻力×阻力臂)
【变式延伸】
(1)增大 (2)1.2 (3)杠杆自重对杠杆平衡有影响
例6 (1)匀速 (2)不正确 摩擦
(3)0.6 78.4% 2.4 0.3 (4)高
[解析] (1)实验中应沿竖直方向匀速缓慢拉动弹簧测力计,此时弹簧测力计的示数才等于拉力的大小。
(2)在弹簧测力计静止时读出了数据,由于不会克服轮与轴、绳与轮之间的摩擦,将导致弹簧测力计的示数偏小,故他的想法是不正确的。
(3)在第3次测量中,滑轮组做的有用功:W有=Gh=6 N×0.1 m=0.6 J;根据表格中第2次测量数据可知,滑轮组的机械效率:η2===≈0.784=78.4%;由图丙可知:弹簧测力计的分度值为0.2 N,故其示数为2.4 N,由于n=3,则弹簧测力计上升的距离为s'=nh'=3×0.1 m=0.3 m。
(4)比较三次实验数据可知:相同的滑轮组提起的物体越重,其机械效率越高。
【变式延伸】
(1)0.4 80% (2)4、5
(3)不同滑轮组提升相同重物时,动滑轮越重,滑轮组的机械效率越低
[解析] (1)图丁中, n=4,则绳端移动距离:s=nh=4×0.1 m=0.4 m,故滑轮组的机械效率:η====0.8=80%。
(2)为了得出“使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子绕线方式无关”的结论,根据控制变量法,则要控制提升物体的重力、滑轮个数相同,只改变绳子的绕线方式,故应比较4、5两次实验数据。
(3)通过比较6、7两次实验数据,滑轮组不同,提升的重物相同,动滑轮越重,机械效率越低,故可得出结论:不同滑轮组提升相同重物时,动滑轮越重,滑轮组的机械效率越低。