北师大版八年级下9.4功率 同步练习(有解析)
文档属性
| 名称 | 北师大版八年级下9.4功率 同步练习(有解析) |

|
|
| 格式 | docx | ||
| 文件大小 | 845.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-03-31 00:00:00 | ||
图片预览
文档简介
9.4 功率 同步练习
一、单选题
1.下列说法中正确的是( )
A.机械效率高的机械,做功就越多 B.功率大的机械,做功就越多
C.功率大的机械,做功就越快 D.功率小的机械,其机械效率越低
2.关于功和功率,下列说法中正确的是( )
A.做功时间越多的机械,做功越多 B.功率越大的机械,做功越多
C.做功时间越少的机械,功率越大 D.做功越快的机械,功率越大
3.甲、乙两台机器都正常工作时,甲的功率大于乙的功率。以下判断正确的是( )
A.甲做的功一定比乙多 B.乙做功所花的时间一定比甲多
C.甲做功一定比乙快 D.相同时间内,乙做功比甲多
4.甲、乙两人爬楼比赛,同时从一楼出发跑上五楼,结果甲先到而获胜,则下列说法正确的是( )
A.甲做功多, 甲的功率大 B.乙做功多,乙的功率大
C.若两人的体重相同,则甲做的功多,甲的功率大 D.若两人做的功相同,则甲用时少,甲的功率大
5.如图,中学生小丽和爷爷同时从一楼出发,爬到约10m高的四楼,小丽用时50s,爷爷用时60s,爷爷质量比小丽大,下列说法正确的是( )
A.小丽做的功约为500J
B.小丽做功的功率约为100W
C.小丽和爷爷爬相同的楼梯,两人做功相同
D.功和功率的大小关系都无法判断
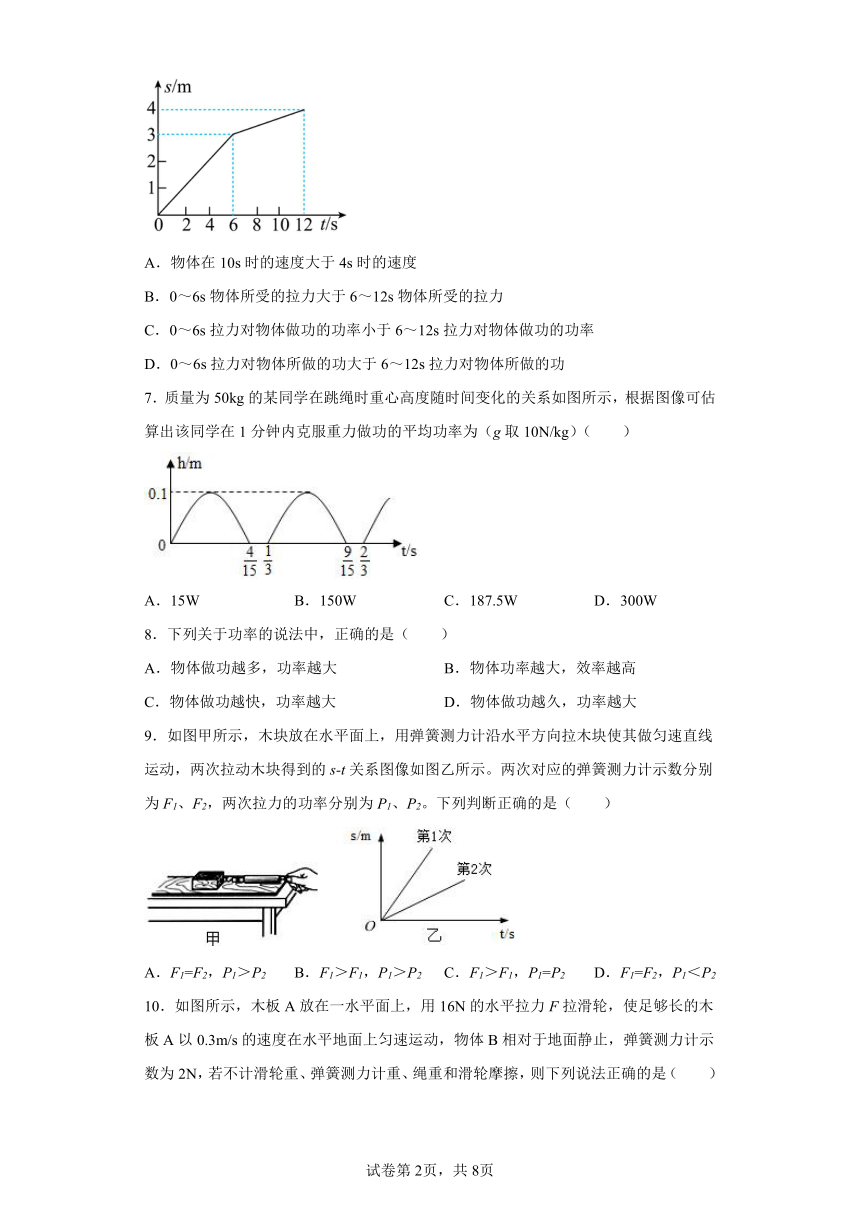
6.一定质量的物体在水平拉力的作用下沿水平面运动,物体运动的图像如图所示,下列判断正确的是( )
A.物体在10s时的速度大于4s时的速度
B.0~6s物体所受的拉力大于6~12s物体所受的拉力
C.0~6s拉力对物体做功的功率小于6~12s拉力对物体做功的功率
D.0~6s拉力对物体所做的功大于6~12s拉力对物体所做的功
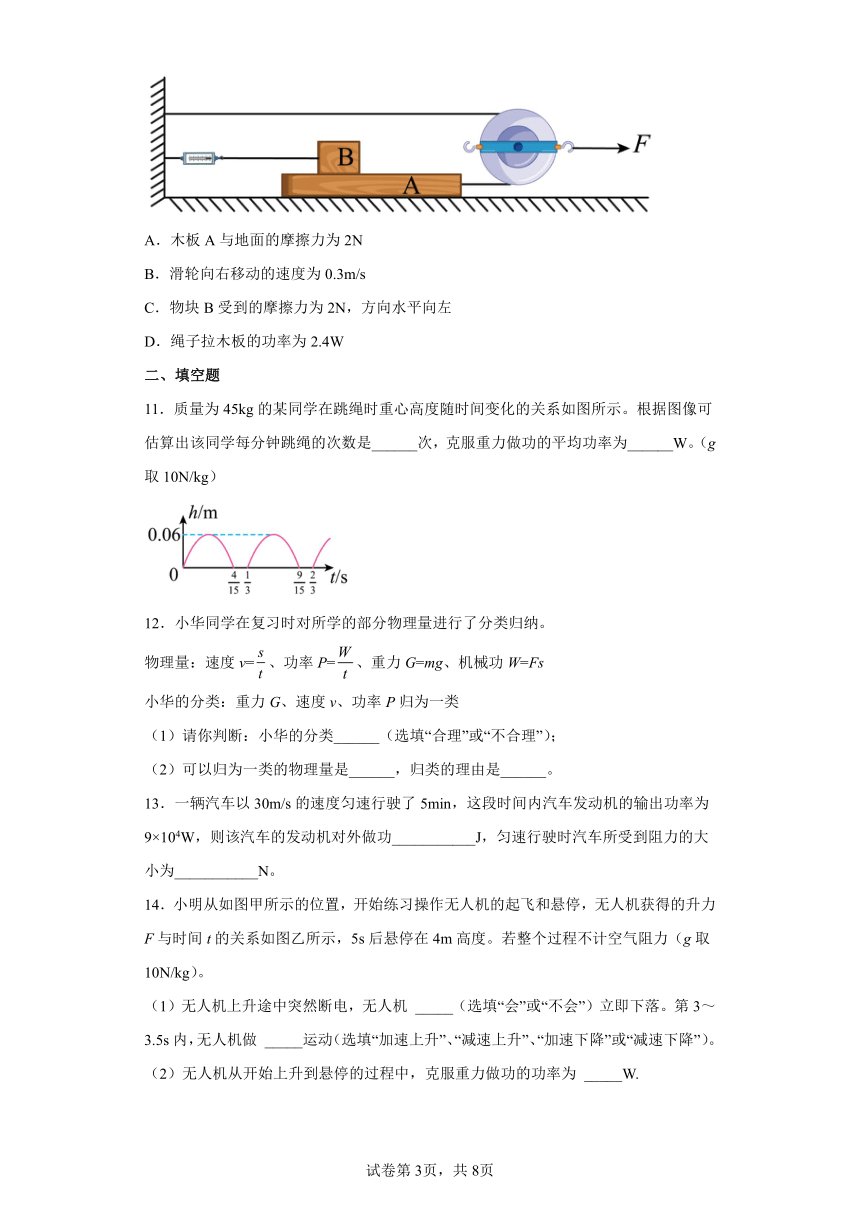
7.质量为50kg的某同学在跳绳时重心高度随时间变化的关系如图所示,根据图像可估算出该同学在1分钟内克服重力做功的平均功率为(g取10N/kg)( )
A.15W B.150W C.187.5W D.300W
8.下列关于功率的说法中,正确的是( )
A.物体做功越多,功率越大 B.物体功率越大,效率越高
C.物体做功越快,功率越大 D.物体做功越久,功率越大
9.如图甲所示,木块放在水平面上,用弹簧测力计沿水平方向拉木块使其做匀速直线运动,两次拉动木块得到的s-t关系图像如图乙所示。两次对应的弹簧测力计示数分别为F1、F2,两次拉力的功率分别为P1、P2。下列判断正确的是( )
A.F1=F2,P1>P2 B.F1>F1,P1>P2 C.F1>F1,P1=P2 D.F1=F2,P1<P2
10.如图所示,木板A放在一水平面上,用16N的水平拉力F拉滑轮,使足够长的木板A以0.3m/s的速度在水平地面上匀速运动,物体B相对于地面静止,弹簧测力计示数为2N,若不计滑轮重、弹簧测力计重、绳重和滑轮摩擦,则下列说法正确的是( )
A.木板A与地面的摩擦力为2N
B.滑轮向右移动的速度为0.3m/s
C.物块B受到的摩擦力为2N,方向水平向左
D.绳子拉木板的功率为2.4W
二、填空题
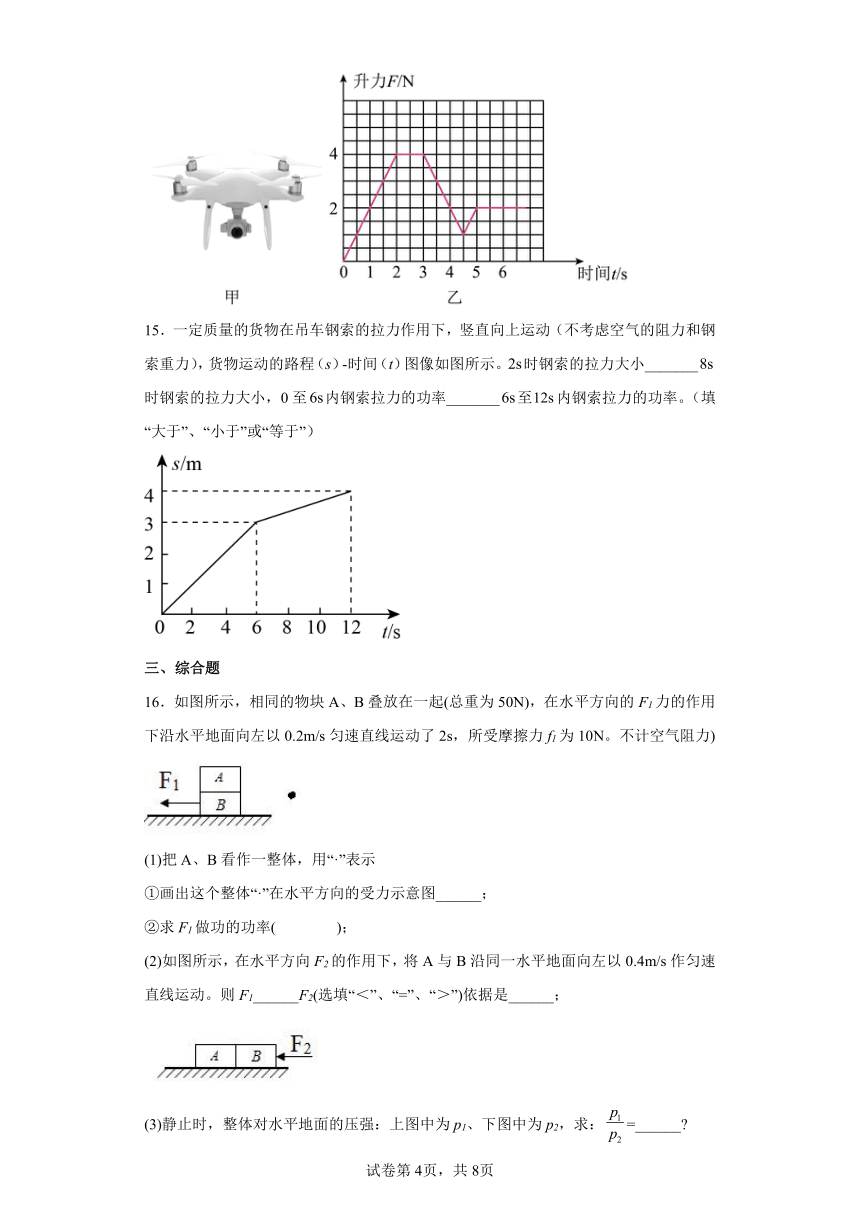
11.质量为45kg的某同学在跳绳时重心高度随时间变化的关系如图所示。根据图像可估算出该同学每分钟跳绳的次数是______次,克服重力做功的平均功率为______W。(g取10N/kg)
12.小华同学在复习时对所学的部分物理量进行了分类归纳。
物理量:速度v=、功率P=、重力G=mg、机械功W=Fs
小华的分类:重力G、速度v、功率P归为一类
(1)请你判断:小华的分类______(选填“合理”或“不合理”);
(2)可以归为一类的物理量是______,归类的理由是______。
13.一辆汽车以30m/s的速度匀速行驶了5min,这段时间内汽车发动机的输出功率为9×104W,则该汽车的发动机对外做功___________J,匀速行驶时汽车所受到阻力的大小为___________N。
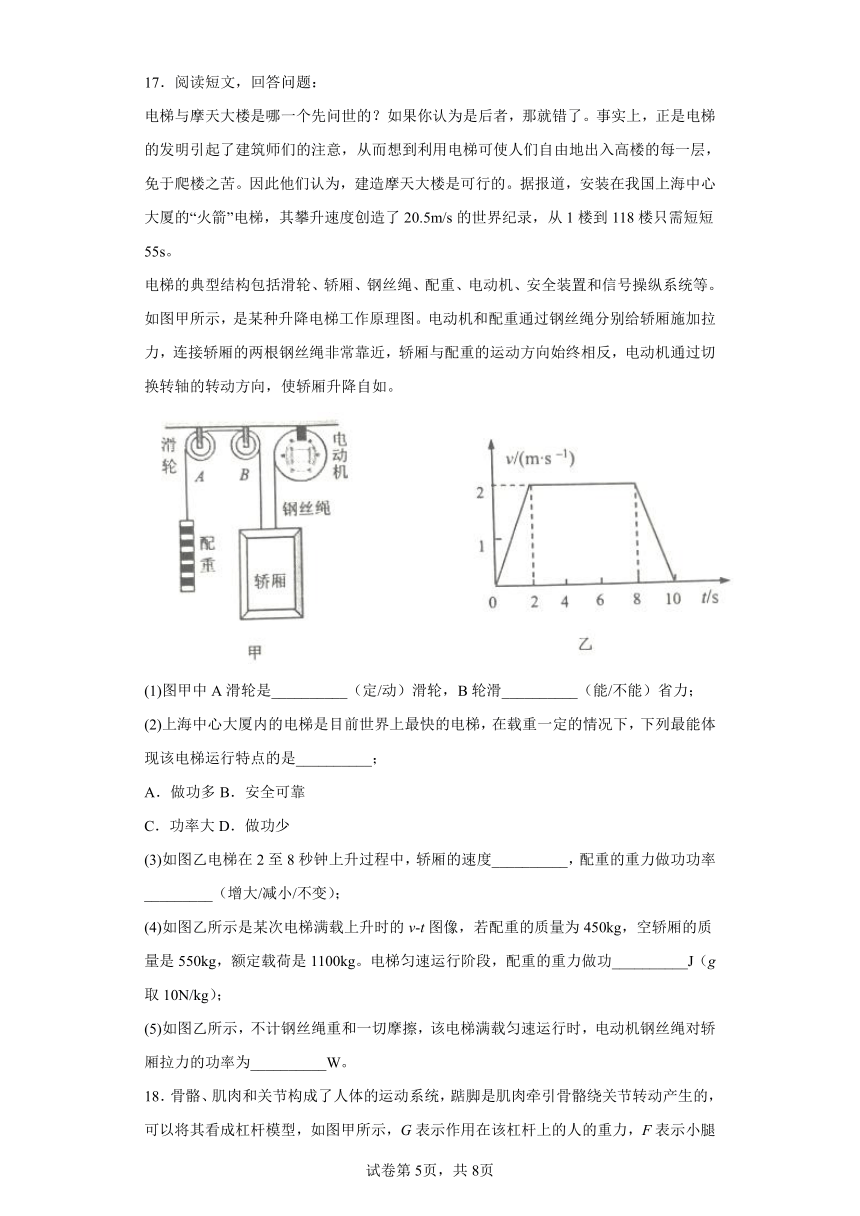
14.小明从如图甲所示的位置,开始练习操作无人机的起飞和悬停,无人机获得的升力F与时间t的关系如图乙所示,5s后悬停在4m高度。若整个过程不计空气阻力(g取10N/kg)。
(1)无人机上升途中突然断电,无人机 _____(选填“会”或“不会”)立即下落。第3~3.5s内,无人机做 _____运动(选填“加速上升”、“减速上升”、“加速下降”或“减速下降”)。
(2)无人机从开始上升到悬停的过程中,克服重力做功的功率为 _____W.
15.一定质量的货物在吊车钢索的拉力作用下,竖直向上运动(不考虑空气的阻力和钢索重力),货物运动的路程(s)-时间(t)图像如图所示。时钢索的拉力大小_______时钢索的拉力大小,0至内钢索拉力的功率_______至内钢索拉力的功率。(填“大于”、“小于”或“等于”)
三、综合题
16.如图所示,相同的物块A、B叠放在一起(总重为50N),在水平方向的F1力的作用下沿水平地面向左以0.2m/s匀速直线运动了2s,所受摩擦力f1为10N。不计空气阻力)
(1)把A、B看作一整体,用“·”表示
①画出这个整体“·”在水平方向的受力示意图______;
②求F1做功的功率( );
(2)如图所示,在水平方向F2的作用下,将A与B沿同一水平地面向左以0.4m/s作匀速直线运动。则F1______F2(选填“<”、“=”、“>”)依据是______;
(3)静止时,整体对水平地面的压强:上图中为p1、下图中为p2,求:=______
17.阅读短文,回答问题:
电梯与摩天大楼是哪一个先问世的?如果你认为是后者,那就错了。事实上,正是电梯的发明引起了建筑师们的注意,从而想到利用电梯可使人们自由地出入高楼的每一层,免于爬楼之苦。因此他们认为,建造摩天大楼是可行的。据报道,安装在我国上海中心大厦的“火箭”电梯,其攀升速度创造了20.5m/s的世界纪录,从1楼到118楼只需短短55s。
电梯的典型结构包括滑轮、轿厢、钢丝绳、配重、电动机、安全装置和信号操纵系统等。如图甲所示,是某种升降电梯工作原理图。电动机和配重通过钢丝绳分别给轿厢施加拉力,连接轿厢的两根钢丝绳非常靠近,轿厢与配重的运动方向始终相反,电动机通过切换转轴的转动方向,使轿厢升降自如。
(1)图甲中A滑轮是__________(定/动)滑轮,B轮滑__________(能/不能)省力;
(2)上海中心大厦内的电梯是目前世界上最快的电梯,在载重一定的情况下,下列最能体现该电梯运行特点的是__________;
A.做功多B.安全可靠
C.功率大D.做功少
(3)如图乙电梯在2至8秒钟上升过程中,轿厢的速度__________,配重的重力做功功率_________(增大/减小/不变);
(4)如图乙所示是某次电梯满载上升时的v-t图像,若配重的质量为450kg,空轿厢的质量是550kg,额定载荷是1100kg。电梯匀速运行阶段,配重的重力做功__________J(g取10N/kg);
(5)如图乙所示,不计钢丝绳重和一切摩擦,该电梯满载匀速运行时,电动机钢丝绳对轿厢拉力的功率为__________W。
18.骨骼、肌肉和关节构成了人体的运动系统,踮脚是肌肉牵引骨骼绕关节转动产生的,可以将其看成杠杆模型,如图甲所示,G表示作用在该杠杆上的人的重力,F表示小腿肌肉对该杠杆的拉力.如图乙是小明将脚踮起时单只脚的受力示意图,已知小明的重力为600 N,小腿肌肉对这只脚的拉力竖直向上,小明在1 min内完成了40个双脚同时踮起的动作;脚跟踮起后,每只脚与水平地面的接触面积为。
(1)由图甲可知,踮脚时,可将脚看作一个______(选填“省力”“费力”或“等臂”)杠杆;假设重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,小腿肌肉对每只脚的拉力的大小将______(选填“变大”“不变”或“变小”)。
(2)脚跟踮起后,小明对水平地面的压强是多少______?
(3)脚跟踮起后,小腿肌肉对每只脚的拉力是多少______?
(4)小明在踮脚过程中克服重力做功的功率是多少______?
19.阅读短文,回答问题
智能防疫机器人
我国研制的某款智能防疫机器人,具有自主测温 移动 避障等功能
机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系会自动语音播报,并在显示屏上用红色框标注人的脸部
机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,图甲为控制电机运转的原理电路,U为输入电压,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变
机器人为有效避障,在移动过程中会发射 接收超声波(或激光)来侦测障碍物信息,当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线
下表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用____(选填“超声波”或“激光”)才能较好感知到障碍物:以移动机器人为参照物,障碍物是____的
(2)下列关于机器人的说法中,错误的是____
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的电磁波
C.图甲中电磁铁的上端为N极
D.机器人发现体温38℃的人会语音报警并识别
(3)若机器人以最大速度沿水平路面匀速直线运动7min,此过程中机器人受到的阻力为____N,消耗的电能占电池所能输出总电能的____ %。
(4)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图乙,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图中_____(选填“ab”或“bc”)段,己知无磁场时RB阻值为200Ω,R1的阻值为400Ω,线圈电阻忽略不计当U为24V时,处在磁场中的RB电功率为0.32W,则R1两端的电压U1是_____V。
(5)图丙是机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱动电机旋转齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为0。某次当驱动电机的齿轮匀速转动时,电缆输出如图丁所示周期性变化的电流,则1s内对准传感器的齿间隙共有_____个;若此时机器人遇到障碍物,减速器启动,则经减速器降速后的齿轮转速为_____ r/min。
试卷第1页,共3页
试卷第1页,共3页
参考答案:
1.C
【解析】
【详解】
A.机械效率高的机械,说明所做的有用功占总功的比值大,不是说做的功越多,故A错误;
BC.功率表示物体做功快慢的物理量,功率大的机械,说明做功就越快,做功不一定越多,因为做功的时间不确定,故B错误,C正确;
D.功率是比较做功快慢的物理量,机械效率是有用功和总功的比值,两者没有必然联系,故D错误。
故选C。
2.D
【解析】
【分析】
【详解】
A.做功的多少由功率和时间共同决定,故A错误;
B.功率越大,表示机械做功越快,单位时间内做的功越多;由 知道,做功不一定多,还要看做功的时间,故B错误;
C.由 知道,在物体做功不确定时,做功时间越少的机械,功率也不一定大,故C错误;
D.功率是表示做功快慢的物理量;做功越快的机械,功率越大,故D正确。
故选D。
3.C
【解析】
【分析】
【详解】
功率是表示做功快慢的物理量,功率大说明做功快,或者是相同的时间内做功多,而不能说明做功或时间的多和少,故C正确,ABD错误。
故选C。
4.D
【解析】
【详解】
AB.甲和乙爬楼,均克服自身重力做功,由于甲乙自身的重力未知,则无法比较甲和乙做功的大小和做功的快慢,故AB错误;
CD.若两人的体重相同,爬楼的高度相同,由公式W=Gh可知,甲乙两人做功相同,甲先到说明做相同的功所用的时间短,由功率公式 可得,甲的功率比乙大,故C错误;D正确。
故选D。
5.B
【解析】
【详解】
A.小丽的质量约为50kg,重力约为
小丽做的功约为
故A错误;
B.小丽做功的功率约为
故B正确;
CD.依题意得,小丽和爷爷的质量不同,小丽和爷爷的重力不同,爬相同高度的楼梯,两人做功不同,爷爷做功更多,但由于不知道具体做功的多少,所以不能判断二人功率的大小,故CD错误。
故选B。
6.D
【解析】
【分析】
【详解】
A.0~6s直线斜率大于6~12s直线斜率,所以0~6s速度大于6~12s速度,故物体在10s时的速度小于4s时的速度,故A错误;
BD.同一物体沿同一水平面运动,则压力大小和接触面的粗糙程度不变,所以物体受到的摩擦力大小不变,因物体做匀速直线运动,则拉力等于摩擦力,所以0~6s物体所受的拉力等于6~12s物体所受的拉力;从图中可以看出,0~6s过程中通过的路程为3m,6~12s过程中通过的路程为1m,而两过程中拉力相同,由W=Fs可知,0~6s拉力对物体所做的功大于6~12s拉力对物体所做的功,故B错误,D正确;
C.由于拉力相同,但0~6s过程中的速度大于6~12s过程中的速度,根据P=Fv可知,0~6s拉力对物体做功的功率大于6~12s拉力对物体做功的功率,故C错误。
故选D。
7.B
【解析】
【详解】
该同学受到的重力为
G=mg=50kg×10N/kg=500N
由图可知该同学跳绳时重心上升的高度为
h=0.1m
该同学跳绳一次克服重力做的功为
W=Gh=500N×0.1m=50J
由图可知该同学从起跳到下一次起跳所用的时间为
=
该同学跳绳的平均功率为
=
故选B。
8.C
【解析】
【详解】
AD.根据公式可知,仅知道功或者时间,是不能确定功率的大小的。故A、D错误;
B.功率表示做功的快慢,效率表示在某个过程中,有用能量与消耗的所有能量之比,二者风马牛不相及,没有关系。故B错误;
C.功率是表示做功快慢的物理量,功率越大,单位时间内做的功越多,做功就越快。故C正确。
故选C。
9.A
【解析】
【详解】
同一木块两次在同一地面上运动,压力不变,接触面的粗糙程度不变,滑动摩擦力不变;由图中可知,木块两次都做匀速直线运动,拉力等于滑动摩擦力,滑动摩擦力相等,拉力F相等,即
F1=F2
从图象中可以判断出,第1次的运动速度v较大,根据公式P=Fv,当拉力相等时,速度越大,拉力的功率越大,即
P1>P2
故选A。
10.D
【解析】
【详解】
A.因为不计滑轮重、绳重和滑轮摩擦,拉力F=16N,根据动滑轮的特点可知,每段绳子上的力为8N。又因为弹簧测力计的示数为2N,物体B相对于地面静止,所以物体B与木板A之间的摩擦力为2N。木板受到向右的绳子拉力等于地面的摩擦力加上B的摩擦力,所以地面对木板A的摩擦力是
fA=8N-2N=6N
故A错误;
B.木板A的移动速度为0.3m/s,动滑轮的移动速度等于拉力F的移动速度,等于木板移动速度的二分之一,大小为0.15m/s,故B错误;
C.物块B始终静止,由力的平衡条件可得,物块B受到的摩擦力等于弹簧测力计的示数为2N,方向水平向右,故C错误;
D.绳子拉木板的功率是
故D正确。
故选D。
11. 180 81
【解析】
【详解】
[1]由图像可知,每跳一次加上停顿的时间是,故一分钟可以跳的次数为
[2]根据题意,该同学的重力为
由功率的公式可得克服重力做功的平均功率为
12. 不合理 速度、功率 因为速度、功率都是表示快慢的物理量
【解析】
【详解】
物体单位时间内通过的路程叫做速度;速度是表示物体运动快慢的物理量;物体单位时间内做的功叫功率,功率是表示做功快慢的物理量;由于地球的吸引而使物体受到的力叫重力。
根据上述分析可知:
(1)[1]小华将重力G、速度v、功率P归为一类是不合理的,因为速度v、功率P二者都是表示快慢的物理量,而重力G不是。
(2)[2][3]可以将速度、功率归为一类,因为速度、功率都是表示快慢的物理量。
13. 2.7×107 3000
【解析】
【分析】
【详解】
[1]汽车功率P=9×104W,时间
t=5min=300s
汽车发动机做的功为
W=Pt=9×104W×300s=2.7×107J
[2]根据
P==Fv
可知,汽车的牵引力
F==3000N
汽车做匀速运动,处于平衡状态,阻力等于牵引力,即
f=F=3000N
14. 不会 加速上升 1.6
【解析】
【分析】
【详解】
(1)[1]无人机上升途中突然断电后,由于惯性,要保持原来的运动状态继续上升,不会立即下落。
[2]5s后悬停在4m高度,飞机悬停在空中时,升力等于重力,由图乙可知
F=G=2N
由图乙可知,3~3.5s时,升力
>G
所以无人机加速上升。
[3] 5s后悬停在4m高度,无人机从开始上升到悬停的过程中上升的高度为4m,克服重力做功
W=Gh=2N×4m=8J
克服重力做功的功率
15. 等于 大于
【解析】
【分析】
【详解】
[1]由图象知,货物在0~6s、6~12s两段时间内都匀速直线运动,但运动速度的大小不同,同时两段时间内货物所受的拉力都等于其重力,所以两次钢索拉力的大小相等。
[2]两段时间内,货物的运动速度分别为
,
据P=Fv知,两段时间内钢索拉力的功率
P1>P2
16. 见解析 2W 见解析 2:1
【解析】
【详解】
(1)[1]将A、B看作一整体,做匀速直线运动,则受力平衡,在水平方向受到向左的拉力与向右的摩擦力作用,二者大小相同,受力示意如图所示:
。
[2]F1做功的功率为
(2)[3][4]在水平方向F2的作用下,将A与B沿同一水平地面向左以0.4m/s作匀速直线运动,处于受力平衡状态;由于滑动摩擦力与压力、接触面的粗糙程度有关,则两种状态下A、B整体受到的摩擦力大小相同,根据二力平衡可知F1=F2。
(3)[5]由于两个物体相同,故静止时两种状态下整体对地面的压强为
,
则
17. 定 不能 C 不变 不变 5.4×104 2.4×104
【解析】
【详解】
(1)[1][2]图甲中A、B滑轮都是定滑轮,都不能省力,只能改变力的方向。
(2)[3]根据
可知在载重一定的情况下,电梯的功率越大,运行的时间就越小。
(3)[4][5]由图乙可知电梯在2至8秒钟上升过程中匀速上升,轿厢的速度不变,配重的速度也不变。根据
可知配重的重力做功功率不变。
(4)[6]由图乙可知,电梯匀速运行阶段,配重运动距离等于轿厢上升的高度
故配重的重力做功为
(5)[7]电梯满载匀速运行时,电动机钢丝绳对轿厢拉力为
故电动机钢丝绳对轿厢的拉力的功率为
18. 省力 不变 200N 24W
【解析】
【分析】
【详解】
解:(1)[1][2]踮脚时,脚尖是支点,拉力是动力,脚承担的重力是阻力,此时动力臂大于阻力臂,因此可将脚看作一个省力杠杆;重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,重力的方向不变,但力臂在减小,同样拉力方向不变,但力臂在减小,但阻力臂和动力臂的比值始终不变,因此小腿肌肉对每只脚的拉力的大小不变。
(2)[3]小明对水平地面的压力
F压=G总=600N
受力面积
则小明对水平地面的压强
p===1.5×105Pa
(3)[4]图乙中,动力的力臂
阻力的力臂
每只脚承担人体重力的一半,因此
G1=G总=×600N=300N
根据杠杆的平衡条件,则小腿肌肉对单只脚的拉力
(4)[5]双脚踮起一次小腿肌肉对脚的拉力做的功
小明踮脚过程中克服重力做的功等于小腿肌肉对脚的拉力做的功
小明在1 min内完成40个双脚同时踮起动作克服重力所做的功
则小明踮脚过程中克服重力做功的功率
答:(1)可将脚看作一个省力杠杆,拉力的大小不变;
(2)小明对水平地面的压强为1.5×105Pa;
(3)小腿肌肉对每只脚的拉力为200N;
(4)小明在踮脚过程中克服重力做功的功率为24W。
19. 超声波 运动 A 240 3.33 ab 16 100 10
【解析】
【详解】
(1)[1]激光可以在透明介质中传播,超声波遇到障碍物会反射从而被机器人接收到,故机器人在行进过程中遇到玻璃等透明障碍物时,利用超声波才能较好感知到障碍物。
[2]机器人在运动的过程中,障碍物相对于机器人的位置发生了改变,所以以移动机器人为参照物,障碍物是运动的。
(2)[3]由题意可知菲涅尔透镜对光线有会聚作用,所以它相当于凸透镜,所以A错误、符合题意,故选A。
(3)[4]驱动电机的机械功率
机器人以最大速度沿水平路面匀速直线运动时,其受到的阻力和驱动电机的牵引力相等
[5]机器人以最大速度沿水平路面匀速直线运动7min,其消耗的电能
电池所能输出的总电能
消耗的电能占电池所能输出总电能的百分比
(4)[6]由题意可知,磁敏电阻在正常工作区时,其电阻的变化阻很小,所以控制电路两端电压相对较稳定,所以磁敏电阻的正常工作区对应图中ab段。
[7]R1和RB串联,当U为24V时,通过RB的电流
此时RB的电功率为0.32W,可得
解上式可得
由于磁敏电阻的正常工作时,其电阻变大不大,故由题意可得此时
R1和RB串联,由串联电路的分压原理可得
解上式可得
(5)[8]由丁图可知,10ms内对准传感器的齿间隙为1个,则1s内对准传感器的齿间隙共有
即:1s内对准传感器的齿间隙共有100个。
[9]由丙图可知驱动电机的齿轮间隙共有20个,也就是说驱动电机的转速为,若以分钟为单位,其转速为
减速器的减速比为,故经减速器降速后的齿轮转速为。
答案第1页,共2页
答案第1页,共2页
一、单选题
1.下列说法中正确的是( )
A.机械效率高的机械,做功就越多 B.功率大的机械,做功就越多
C.功率大的机械,做功就越快 D.功率小的机械,其机械效率越低
2.关于功和功率,下列说法中正确的是( )
A.做功时间越多的机械,做功越多 B.功率越大的机械,做功越多
C.做功时间越少的机械,功率越大 D.做功越快的机械,功率越大
3.甲、乙两台机器都正常工作时,甲的功率大于乙的功率。以下判断正确的是( )
A.甲做的功一定比乙多 B.乙做功所花的时间一定比甲多
C.甲做功一定比乙快 D.相同时间内,乙做功比甲多
4.甲、乙两人爬楼比赛,同时从一楼出发跑上五楼,结果甲先到而获胜,则下列说法正确的是( )
A.甲做功多, 甲的功率大 B.乙做功多,乙的功率大
C.若两人的体重相同,则甲做的功多,甲的功率大 D.若两人做的功相同,则甲用时少,甲的功率大
5.如图,中学生小丽和爷爷同时从一楼出发,爬到约10m高的四楼,小丽用时50s,爷爷用时60s,爷爷质量比小丽大,下列说法正确的是( )
A.小丽做的功约为500J
B.小丽做功的功率约为100W
C.小丽和爷爷爬相同的楼梯,两人做功相同
D.功和功率的大小关系都无法判断
6.一定质量的物体在水平拉力的作用下沿水平面运动,物体运动的图像如图所示,下列判断正确的是( )
A.物体在10s时的速度大于4s时的速度
B.0~6s物体所受的拉力大于6~12s物体所受的拉力
C.0~6s拉力对物体做功的功率小于6~12s拉力对物体做功的功率
D.0~6s拉力对物体所做的功大于6~12s拉力对物体所做的功
7.质量为50kg的某同学在跳绳时重心高度随时间变化的关系如图所示,根据图像可估算出该同学在1分钟内克服重力做功的平均功率为(g取10N/kg)( )
A.15W B.150W C.187.5W D.300W
8.下列关于功率的说法中,正确的是( )
A.物体做功越多,功率越大 B.物体功率越大,效率越高
C.物体做功越快,功率越大 D.物体做功越久,功率越大
9.如图甲所示,木块放在水平面上,用弹簧测力计沿水平方向拉木块使其做匀速直线运动,两次拉动木块得到的s-t关系图像如图乙所示。两次对应的弹簧测力计示数分别为F1、F2,两次拉力的功率分别为P1、P2。下列判断正确的是( )
A.F1=F2,P1>P2 B.F1>F1,P1>P2 C.F1>F1,P1=P2 D.F1=F2,P1<P2
10.如图所示,木板A放在一水平面上,用16N的水平拉力F拉滑轮,使足够长的木板A以0.3m/s的速度在水平地面上匀速运动,物体B相对于地面静止,弹簧测力计示数为2N,若不计滑轮重、弹簧测力计重、绳重和滑轮摩擦,则下列说法正确的是( )
A.木板A与地面的摩擦力为2N
B.滑轮向右移动的速度为0.3m/s
C.物块B受到的摩擦力为2N,方向水平向左
D.绳子拉木板的功率为2.4W
二、填空题
11.质量为45kg的某同学在跳绳时重心高度随时间变化的关系如图所示。根据图像可估算出该同学每分钟跳绳的次数是______次,克服重力做功的平均功率为______W。(g取10N/kg)
12.小华同学在复习时对所学的部分物理量进行了分类归纳。
物理量:速度v=、功率P=、重力G=mg、机械功W=Fs
小华的分类:重力G、速度v、功率P归为一类
(1)请你判断:小华的分类______(选填“合理”或“不合理”);
(2)可以归为一类的物理量是______,归类的理由是______。
13.一辆汽车以30m/s的速度匀速行驶了5min,这段时间内汽车发动机的输出功率为9×104W,则该汽车的发动机对外做功___________J,匀速行驶时汽车所受到阻力的大小为___________N。
14.小明从如图甲所示的位置,开始练习操作无人机的起飞和悬停,无人机获得的升力F与时间t的关系如图乙所示,5s后悬停在4m高度。若整个过程不计空气阻力(g取10N/kg)。
(1)无人机上升途中突然断电,无人机 _____(选填“会”或“不会”)立即下落。第3~3.5s内,无人机做 _____运动(选填“加速上升”、“减速上升”、“加速下降”或“减速下降”)。
(2)无人机从开始上升到悬停的过程中,克服重力做功的功率为 _____W.
15.一定质量的货物在吊车钢索的拉力作用下,竖直向上运动(不考虑空气的阻力和钢索重力),货物运动的路程(s)-时间(t)图像如图所示。时钢索的拉力大小_______时钢索的拉力大小,0至内钢索拉力的功率_______至内钢索拉力的功率。(填“大于”、“小于”或“等于”)
三、综合题
16.如图所示,相同的物块A、B叠放在一起(总重为50N),在水平方向的F1力的作用下沿水平地面向左以0.2m/s匀速直线运动了2s,所受摩擦力f1为10N。不计空气阻力)
(1)把A、B看作一整体,用“·”表示
①画出这个整体“·”在水平方向的受力示意图______;
②求F1做功的功率( );
(2)如图所示,在水平方向F2的作用下,将A与B沿同一水平地面向左以0.4m/s作匀速直线运动。则F1______F2(选填“<”、“=”、“>”)依据是______;
(3)静止时,整体对水平地面的压强:上图中为p1、下图中为p2,求:=______
17.阅读短文,回答问题:
电梯与摩天大楼是哪一个先问世的?如果你认为是后者,那就错了。事实上,正是电梯的发明引起了建筑师们的注意,从而想到利用电梯可使人们自由地出入高楼的每一层,免于爬楼之苦。因此他们认为,建造摩天大楼是可行的。据报道,安装在我国上海中心大厦的“火箭”电梯,其攀升速度创造了20.5m/s的世界纪录,从1楼到118楼只需短短55s。
电梯的典型结构包括滑轮、轿厢、钢丝绳、配重、电动机、安全装置和信号操纵系统等。如图甲所示,是某种升降电梯工作原理图。电动机和配重通过钢丝绳分别给轿厢施加拉力,连接轿厢的两根钢丝绳非常靠近,轿厢与配重的运动方向始终相反,电动机通过切换转轴的转动方向,使轿厢升降自如。
(1)图甲中A滑轮是__________(定/动)滑轮,B轮滑__________(能/不能)省力;
(2)上海中心大厦内的电梯是目前世界上最快的电梯,在载重一定的情况下,下列最能体现该电梯运行特点的是__________;
A.做功多B.安全可靠
C.功率大D.做功少
(3)如图乙电梯在2至8秒钟上升过程中,轿厢的速度__________,配重的重力做功功率_________(增大/减小/不变);
(4)如图乙所示是某次电梯满载上升时的v-t图像,若配重的质量为450kg,空轿厢的质量是550kg,额定载荷是1100kg。电梯匀速运行阶段,配重的重力做功__________J(g取10N/kg);
(5)如图乙所示,不计钢丝绳重和一切摩擦,该电梯满载匀速运行时,电动机钢丝绳对轿厢拉力的功率为__________W。
18.骨骼、肌肉和关节构成了人体的运动系统,踮脚是肌肉牵引骨骼绕关节转动产生的,可以将其看成杠杆模型,如图甲所示,G表示作用在该杠杆上的人的重力,F表示小腿肌肉对该杠杆的拉力.如图乙是小明将脚踮起时单只脚的受力示意图,已知小明的重力为600 N,小腿肌肉对这只脚的拉力竖直向上,小明在1 min内完成了40个双脚同时踮起的动作;脚跟踮起后,每只脚与水平地面的接触面积为。
(1)由图甲可知,踮脚时,可将脚看作一个______(选填“省力”“费力”或“等臂”)杠杆;假设重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,小腿肌肉对每只脚的拉力的大小将______(选填“变大”“不变”或“变小”)。
(2)脚跟踮起后,小明对水平地面的压强是多少______?
(3)脚跟踮起后,小腿肌肉对每只脚的拉力是多少______?
(4)小明在踮脚过程中克服重力做功的功率是多少______?
19.阅读短文,回答问题
智能防疫机器人
我国研制的某款智能防疫机器人,具有自主测温 移动 避障等功能
机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系会自动语音播报,并在显示屏上用红色框标注人的脸部
机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,图甲为控制电机运转的原理电路,U为输入电压,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变
机器人为有效避障,在移动过程中会发射 接收超声波(或激光)来侦测障碍物信息,当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线
下表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速器的减速比”为输入转速与输出转速的比值
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用____(选填“超声波”或“激光”)才能较好感知到障碍物:以移动机器人为参照物,障碍物是____的
(2)下列关于机器人的说法中,错误的是____
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的电磁波
C.图甲中电磁铁的上端为N极
D.机器人发现体温38℃的人会语音报警并识别
(3)若机器人以最大速度沿水平路面匀速直线运动7min,此过程中机器人受到的阻力为____N,消耗的电能占电池所能输出总电能的____ %。
(4)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图乙,当磁敏电阻在正常工作区时,即使图甲电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图中_____(选填“ab”或“bc”)段,己知无磁场时RB阻值为200Ω,R1的阻值为400Ω,线圈电阻忽略不计当U为24V时,处在磁场中的RB电功率为0.32W,则R1两端的电压U1是_____V。
(5)图丙是机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱动电机旋转齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为0。某次当驱动电机的齿轮匀速转动时,电缆输出如图丁所示周期性变化的电流,则1s内对准传感器的齿间隙共有_____个;若此时机器人遇到障碍物,减速器启动,则经减速器降速后的齿轮转速为_____ r/min。
试卷第1页,共3页
试卷第1页,共3页
参考答案:
1.C
【解析】
【详解】
A.机械效率高的机械,说明所做的有用功占总功的比值大,不是说做的功越多,故A错误;
BC.功率表示物体做功快慢的物理量,功率大的机械,说明做功就越快,做功不一定越多,因为做功的时间不确定,故B错误,C正确;
D.功率是比较做功快慢的物理量,机械效率是有用功和总功的比值,两者没有必然联系,故D错误。
故选C。
2.D
【解析】
【分析】
【详解】
A.做功的多少由功率和时间共同决定,故A错误;
B.功率越大,表示机械做功越快,单位时间内做的功越多;由 知道,做功不一定多,还要看做功的时间,故B错误;
C.由 知道,在物体做功不确定时,做功时间越少的机械,功率也不一定大,故C错误;
D.功率是表示做功快慢的物理量;做功越快的机械,功率越大,故D正确。
故选D。
3.C
【解析】
【分析】
【详解】
功率是表示做功快慢的物理量,功率大说明做功快,或者是相同的时间内做功多,而不能说明做功或时间的多和少,故C正确,ABD错误。
故选C。
4.D
【解析】
【详解】
AB.甲和乙爬楼,均克服自身重力做功,由于甲乙自身的重力未知,则无法比较甲和乙做功的大小和做功的快慢,故AB错误;
CD.若两人的体重相同,爬楼的高度相同,由公式W=Gh可知,甲乙两人做功相同,甲先到说明做相同的功所用的时间短,由功率公式 可得,甲的功率比乙大,故C错误;D正确。
故选D。
5.B
【解析】
【详解】
A.小丽的质量约为50kg,重力约为
小丽做的功约为
故A错误;
B.小丽做功的功率约为
故B正确;
CD.依题意得,小丽和爷爷的质量不同,小丽和爷爷的重力不同,爬相同高度的楼梯,两人做功不同,爷爷做功更多,但由于不知道具体做功的多少,所以不能判断二人功率的大小,故CD错误。
故选B。
6.D
【解析】
【分析】
【详解】
A.0~6s直线斜率大于6~12s直线斜率,所以0~6s速度大于6~12s速度,故物体在10s时的速度小于4s时的速度,故A错误;
BD.同一物体沿同一水平面运动,则压力大小和接触面的粗糙程度不变,所以物体受到的摩擦力大小不变,因物体做匀速直线运动,则拉力等于摩擦力,所以0~6s物体所受的拉力等于6~12s物体所受的拉力;从图中可以看出,0~6s过程中通过的路程为3m,6~12s过程中通过的路程为1m,而两过程中拉力相同,由W=Fs可知,0~6s拉力对物体所做的功大于6~12s拉力对物体所做的功,故B错误,D正确;
C.由于拉力相同,但0~6s过程中的速度大于6~12s过程中的速度,根据P=Fv可知,0~6s拉力对物体做功的功率大于6~12s拉力对物体做功的功率,故C错误。
故选D。
7.B
【解析】
【详解】
该同学受到的重力为
G=mg=50kg×10N/kg=500N
由图可知该同学跳绳时重心上升的高度为
h=0.1m
该同学跳绳一次克服重力做的功为
W=Gh=500N×0.1m=50J
由图可知该同学从起跳到下一次起跳所用的时间为
=
该同学跳绳的平均功率为
=
故选B。
8.C
【解析】
【详解】
AD.根据公式可知,仅知道功或者时间,是不能确定功率的大小的。故A、D错误;
B.功率表示做功的快慢,效率表示在某个过程中,有用能量与消耗的所有能量之比,二者风马牛不相及,没有关系。故B错误;
C.功率是表示做功快慢的物理量,功率越大,单位时间内做的功越多,做功就越快。故C正确。
故选C。
9.A
【解析】
【详解】
同一木块两次在同一地面上运动,压力不变,接触面的粗糙程度不变,滑动摩擦力不变;由图中可知,木块两次都做匀速直线运动,拉力等于滑动摩擦力,滑动摩擦力相等,拉力F相等,即
F1=F2
从图象中可以判断出,第1次的运动速度v较大,根据公式P=Fv,当拉力相等时,速度越大,拉力的功率越大,即
P1>P2
故选A。
10.D
【解析】
【详解】
A.因为不计滑轮重、绳重和滑轮摩擦,拉力F=16N,根据动滑轮的特点可知,每段绳子上的力为8N。又因为弹簧测力计的示数为2N,物体B相对于地面静止,所以物体B与木板A之间的摩擦力为2N。木板受到向右的绳子拉力等于地面的摩擦力加上B的摩擦力,所以地面对木板A的摩擦力是
fA=8N-2N=6N
故A错误;
B.木板A的移动速度为0.3m/s,动滑轮的移动速度等于拉力F的移动速度,等于木板移动速度的二分之一,大小为0.15m/s,故B错误;
C.物块B始终静止,由力的平衡条件可得,物块B受到的摩擦力等于弹簧测力计的示数为2N,方向水平向右,故C错误;
D.绳子拉木板的功率是
故D正确。
故选D。
11. 180 81
【解析】
【详解】
[1]由图像可知,每跳一次加上停顿的时间是,故一分钟可以跳的次数为
[2]根据题意,该同学的重力为
由功率的公式可得克服重力做功的平均功率为
12. 不合理 速度、功率 因为速度、功率都是表示快慢的物理量
【解析】
【详解】
物体单位时间内通过的路程叫做速度;速度是表示物体运动快慢的物理量;物体单位时间内做的功叫功率,功率是表示做功快慢的物理量;由于地球的吸引而使物体受到的力叫重力。
根据上述分析可知:
(1)[1]小华将重力G、速度v、功率P归为一类是不合理的,因为速度v、功率P二者都是表示快慢的物理量,而重力G不是。
(2)[2][3]可以将速度、功率归为一类,因为速度、功率都是表示快慢的物理量。
13. 2.7×107 3000
【解析】
【分析】
【详解】
[1]汽车功率P=9×104W,时间
t=5min=300s
汽车发动机做的功为
W=Pt=9×104W×300s=2.7×107J
[2]根据
P==Fv
可知,汽车的牵引力
F==3000N
汽车做匀速运动,处于平衡状态,阻力等于牵引力,即
f=F=3000N
14. 不会 加速上升 1.6
【解析】
【分析】
【详解】
(1)[1]无人机上升途中突然断电后,由于惯性,要保持原来的运动状态继续上升,不会立即下落。
[2]5s后悬停在4m高度,飞机悬停在空中时,升力等于重力,由图乙可知
F=G=2N
由图乙可知,3~3.5s时,升力
>G
所以无人机加速上升。
[3] 5s后悬停在4m高度,无人机从开始上升到悬停的过程中上升的高度为4m,克服重力做功
W=Gh=2N×4m=8J
克服重力做功的功率
15. 等于 大于
【解析】
【分析】
【详解】
[1]由图象知,货物在0~6s、6~12s两段时间内都匀速直线运动,但运动速度的大小不同,同时两段时间内货物所受的拉力都等于其重力,所以两次钢索拉力的大小相等。
[2]两段时间内,货物的运动速度分别为
,
据P=Fv知,两段时间内钢索拉力的功率
P1>P2
16. 见解析 2W 见解析 2:1
【解析】
【详解】
(1)[1]将A、B看作一整体,做匀速直线运动,则受力平衡,在水平方向受到向左的拉力与向右的摩擦力作用,二者大小相同,受力示意如图所示:
。
[2]F1做功的功率为
(2)[3][4]在水平方向F2的作用下,将A与B沿同一水平地面向左以0.4m/s作匀速直线运动,处于受力平衡状态;由于滑动摩擦力与压力、接触面的粗糙程度有关,则两种状态下A、B整体受到的摩擦力大小相同,根据二力平衡可知F1=F2。
(3)[5]由于两个物体相同,故静止时两种状态下整体对地面的压强为
,
则
17. 定 不能 C 不变 不变 5.4×104 2.4×104
【解析】
【详解】
(1)[1][2]图甲中A、B滑轮都是定滑轮,都不能省力,只能改变力的方向。
(2)[3]根据
可知在载重一定的情况下,电梯的功率越大,运行的时间就越小。
(3)[4][5]由图乙可知电梯在2至8秒钟上升过程中匀速上升,轿厢的速度不变,配重的速度也不变。根据
可知配重的重力做功功率不变。
(4)[6]由图乙可知,电梯匀速运行阶段,配重运动距离等于轿厢上升的高度
故配重的重力做功为
(5)[7]电梯满载匀速运行时,电动机钢丝绳对轿厢拉力为
故电动机钢丝绳对轿厢的拉力的功率为
18. 省力 不变 200N 24W
【解析】
【分析】
【详解】
解:(1)[1][2]踮脚时,脚尖是支点,拉力是动力,脚承担的重力是阻力,此时动力臂大于阻力臂,因此可将脚看作一个省力杠杆;重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,重力的方向不变,但力臂在减小,同样拉力方向不变,但力臂在减小,但阻力臂和动力臂的比值始终不变,因此小腿肌肉对每只脚的拉力的大小不变。
(2)[3]小明对水平地面的压力
F压=G总=600N
受力面积
则小明对水平地面的压强
p===1.5×105Pa
(3)[4]图乙中,动力的力臂
阻力的力臂
每只脚承担人体重力的一半,因此
G1=G总=×600N=300N
根据杠杆的平衡条件,则小腿肌肉对单只脚的拉力
(4)[5]双脚踮起一次小腿肌肉对脚的拉力做的功
小明踮脚过程中克服重力做的功等于小腿肌肉对脚的拉力做的功
小明在1 min内完成40个双脚同时踮起动作克服重力所做的功
则小明踮脚过程中克服重力做功的功率
答:(1)可将脚看作一个省力杠杆,拉力的大小不变;
(2)小明对水平地面的压强为1.5×105Pa;
(3)小腿肌肉对每只脚的拉力为200N;
(4)小明在踮脚过程中克服重力做功的功率为24W。
19. 超声波 运动 A 240 3.33 ab 16 100 10
【解析】
【详解】
(1)[1]激光可以在透明介质中传播,超声波遇到障碍物会反射从而被机器人接收到,故机器人在行进过程中遇到玻璃等透明障碍物时,利用超声波才能较好感知到障碍物。
[2]机器人在运动的过程中,障碍物相对于机器人的位置发生了改变,所以以移动机器人为参照物,障碍物是运动的。
(2)[3]由题意可知菲涅尔透镜对光线有会聚作用,所以它相当于凸透镜,所以A错误、符合题意,故选A。
(3)[4]驱动电机的机械功率
机器人以最大速度沿水平路面匀速直线运动时,其受到的阻力和驱动电机的牵引力相等
[5]机器人以最大速度沿水平路面匀速直线运动7min,其消耗的电能
电池所能输出的总电能
消耗的电能占电池所能输出总电能的百分比
(4)[6]由题意可知,磁敏电阻在正常工作区时,其电阻的变化阻很小,所以控制电路两端电压相对较稳定,所以磁敏电阻的正常工作区对应图中ab段。
[7]R1和RB串联,当U为24V时,通过RB的电流
此时RB的电功率为0.32W,可得
解上式可得
由于磁敏电阻的正常工作时,其电阻变大不大,故由题意可得此时
R1和RB串联,由串联电路的分压原理可得
解上式可得
(5)[8]由丁图可知,10ms内对准传感器的齿间隙为1个,则1s内对准传感器的齿间隙共有
即:1s内对准传感器的齿间隙共有100个。
[9]由丙图可知驱动电机的齿轮间隙共有20个,也就是说驱动电机的转速为,若以分钟为单位,其转速为
减速器的减速比为,故经减速器降速后的齿轮转速为。
答案第1页,共2页
答案第1页,共2页