沪科版物理八年级同步提优训练:10.1科学探究杠杆的平衡条件(共2课时 有答案)
文档属性
| 名称 | 沪科版物理八年级同步提优训练:10.1科学探究杠杆的平衡条件(共2课时 有答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 373.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-04-05 00:00:00 | ||
图片预览
文档简介
第一节 科学探究:杠杆的平衡条件
第1课时 杠杆
1 杠杆及其要素
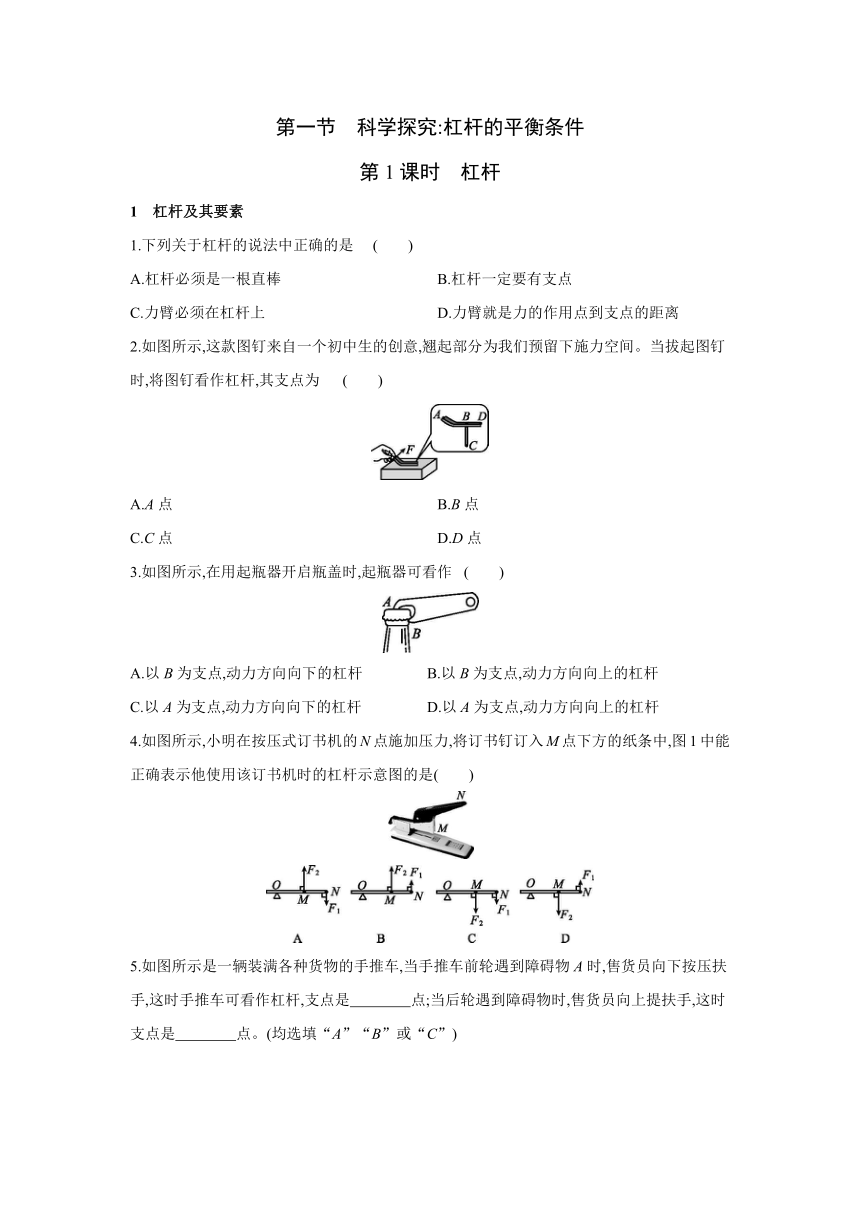
1.下列关于杠杆的说法中正确的是 ( )
A.杠杆必须是一根直棒 B.杠杆一定要有支点
C.力臂必须在杠杆上 D.力臂就是力的作用点到支点的距离
2.如图所示,这款图钉来自一个初中生的创意,翘起部分为我们预留下施力空间。当拔起图钉时,将图钉看作杠杆,其支点为 ( )
A.A点 B.B点
C.C点 D.D点
3.如图所示,在用起瓶器开启瓶盖时,起瓶器可看作 ( )
A.以B为支点,动力方向向下的杠杆 B.以B为支点,动力方向向上的杠杆
C.以A为支点,动力方向向下的杠杆 D.以A为支点,动力方向向上的杠杆
4.如图所示,小明在按压式订书机的N点施加压力,将订书钉订入M点下方的纸条中,图1中能正确表示他使用该订书机时的杠杆示意图的是( )
5.如图所示是一辆装满各种货物的手推车,当手推车前轮遇到障碍物A时,售货员向下按压扶手,这时手推车可看作杠杆,支点是 点;当后轮遇到障碍物时,售货员向上提扶手,这时支点是 点。(均选填“A”“B”或“C”)
2 力臂作图
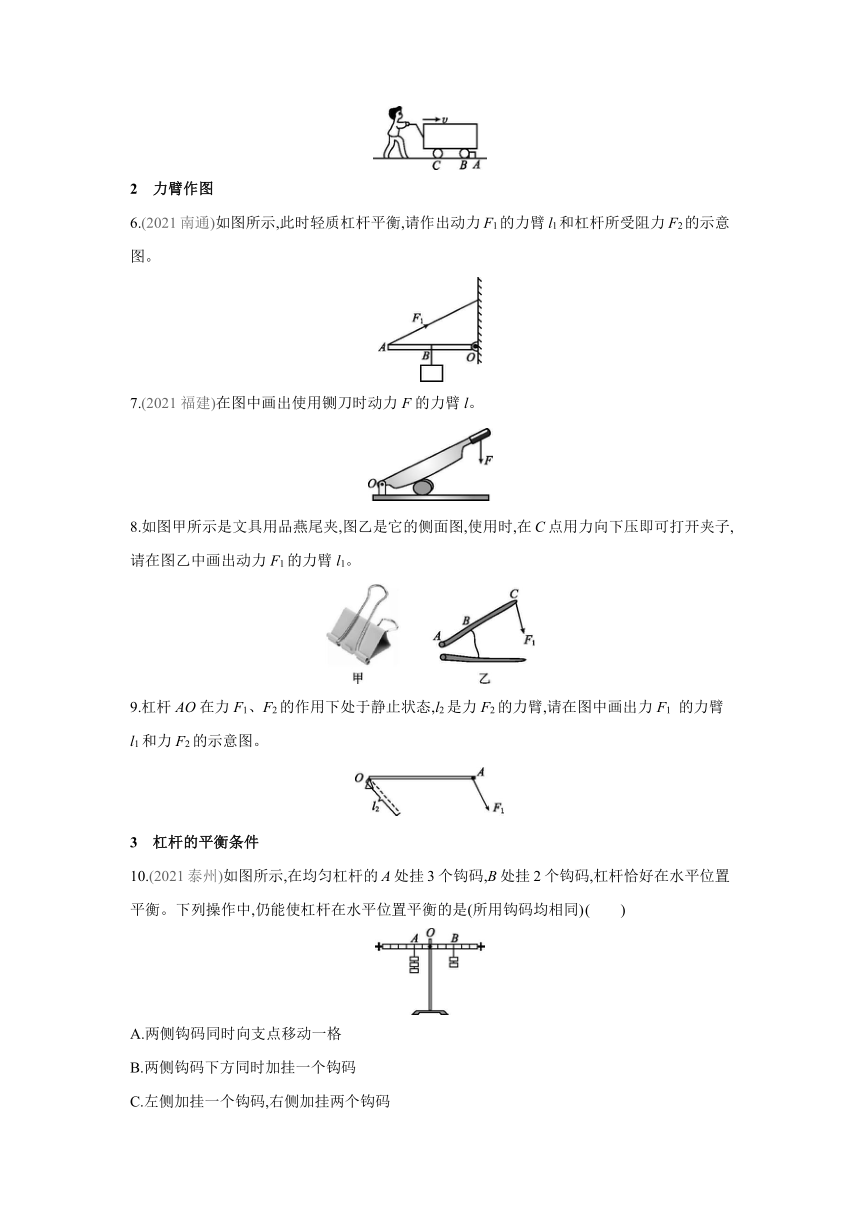
6.(2021南通)如图所示,此时轻质杠杆平衡,请作出动力F1的力臂l1和杠杆所受阻力F2的示意图。
7.(2021福建)在图中画出使用铡刀时动力F的力臂l。
8.如图甲所示是文具用品燕尾夹,图乙是它的侧面图,使用时,在C点用力向下压即可打开夹子,请在图乙中画出动力F1的力臂l1。
9.杠杆AO在力F1、F2的作用下处于静止状态,l2是力F2的力臂,请在图中画出力F1 的力臂l1和力F2的示意图。
3 杠杆的平衡条件
10.(2021泰州)如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡。下列操作中,仍能使杠杆在水平位置平衡的是(所用钩码均相同) ( )
A.两侧钩码同时向支点移动一格
B.两侧钩码下方同时加挂一个钩码
C.左侧加挂一个钩码,右侧加挂两个钩码
D.左侧拿去一个钩码,右侧钩码向左移动一格
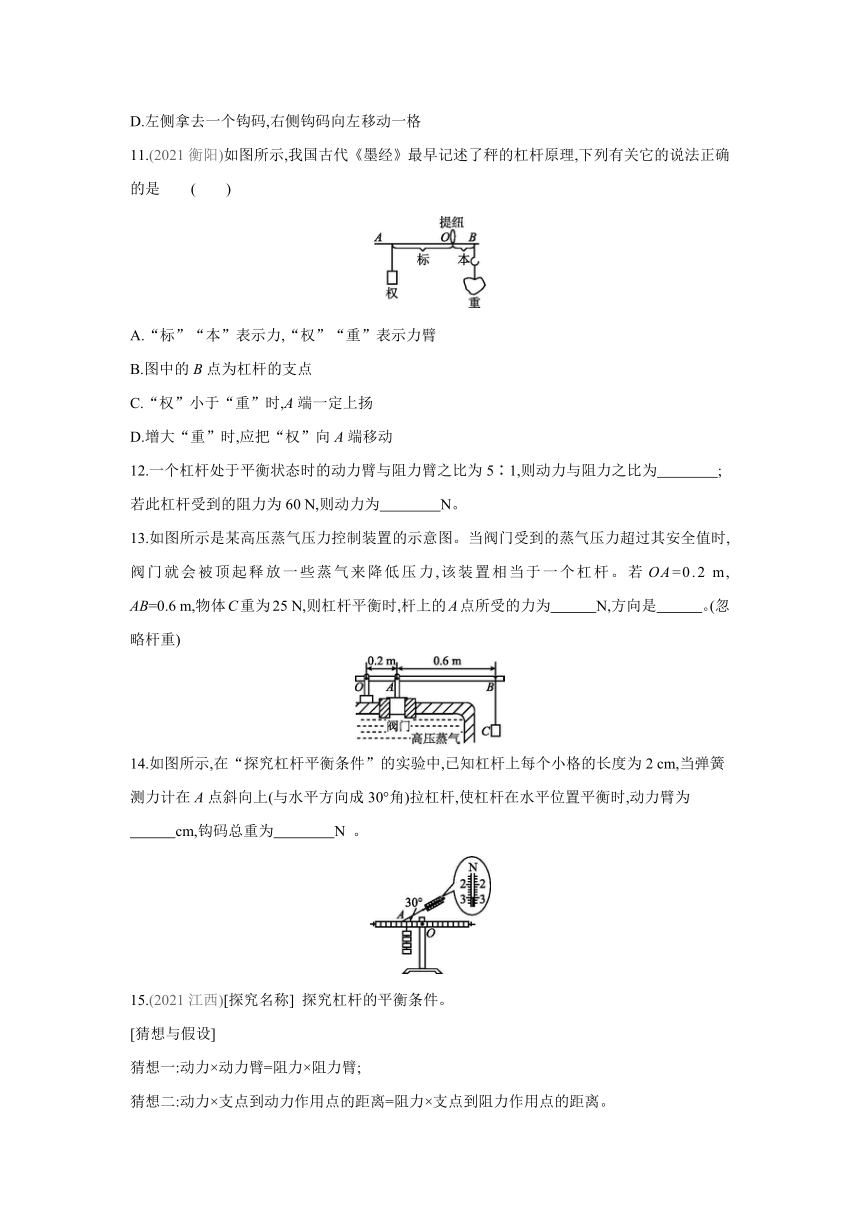
11.(2021衡阳)如图所示,我国古代《墨经》最早记述了秤的杠杆原理,下列有关它的说法正确的是 ( )
A.“标”“本”表示力,“权”“重”表示力臂
B.图中的B点为杠杆的支点
C.“权”小于“重”时,A端一定上扬
D.增大“重”时,应把“权”向A端移动
12.一个杠杆处于平衡状态时的动力臂与阻力臂之比为5∶1,则动力与阻力之比为 ;若此杠杆受到的阻力为60 N,则动力为 N。
13.如图所示是某高压蒸气压力控制装置的示意图。当阀门受到的蒸气压力超过其安全值时,阀门就会被顶起释放一些蒸气来降低压力,该装置相当于一个杠杆。若OA=0.2 m,
AB=0.6 m,物体C重为25 N,则杠杆平衡时,杆上的A点所受的力为 N,方向是 。(忽略杆重)
14.如图所示,在“探究杠杆平衡条件”的实验中,已知杠杆上每个小格的长度为2 cm,当弹簧测力计在A点斜向上(与水平方向成30°角)拉杠杆,使杠杆在水平位置平衡时,动力臂为
cm,钩码总重为 N 。
15.(2021江西)[探究名称] 探究杠杆的平衡条件。
[猜想与假设]
猜想一:动力×动力臂=阻力×阻力臂;
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。
[设计实验与进行实验]
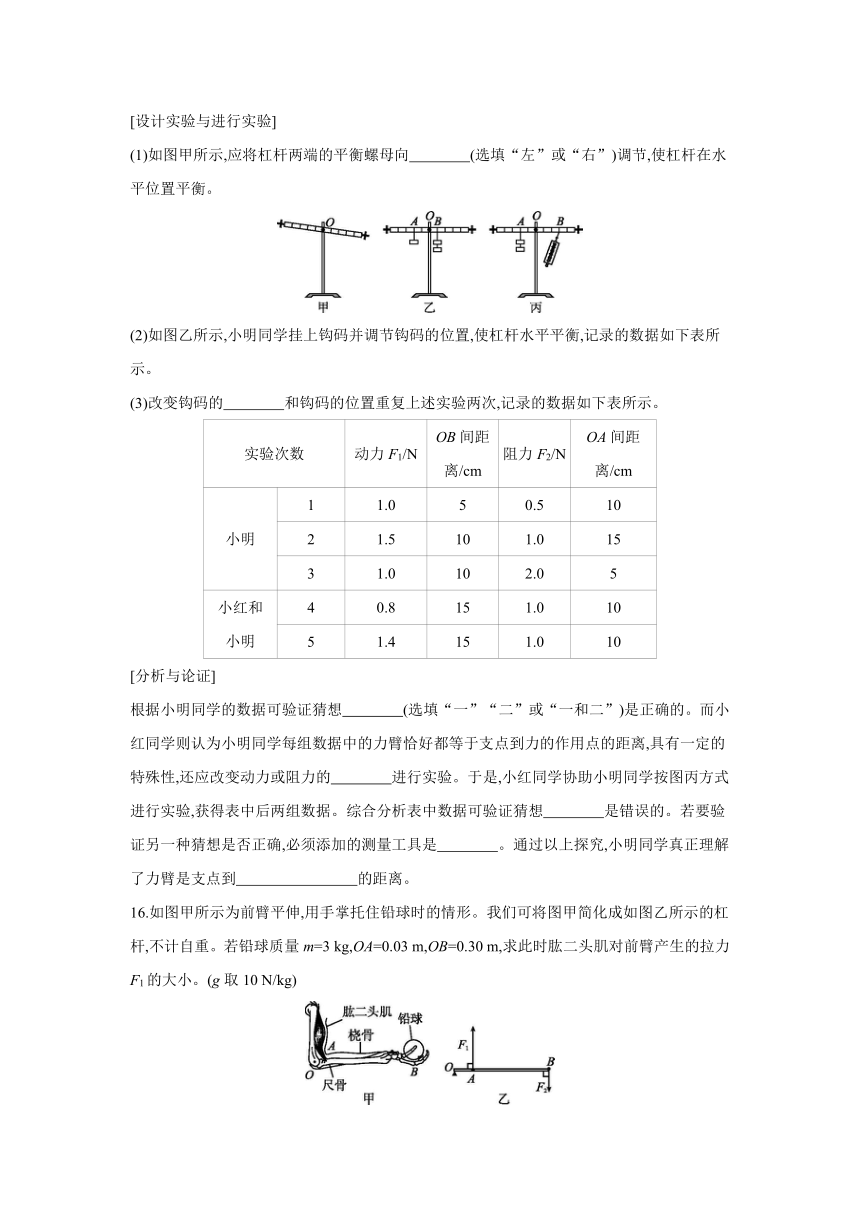
(1)如图甲所示,应将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如下表所示。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如下表所示。
实验次数 动力F1/N OB间距 离/cm 阻力F2/N OA间距 离/cm
小明 1 1.0 5 0.5 10
2 1.5 10 1.0 15
3 1.0 10 2.0 5
小红和 小明 4 0.8 15 1.0 10
5 1.4 15 1.0 10
[分析与论证]
根据小明同学的数据可验证猜想 (选填“一”“二”或“一和二”)是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的 进行实验。于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。通过以上探究,小明同学真正理解了力臂是支点到 的距离。
16.如图甲所示为前臂平伸,用手掌托住铅球时的情形。我们可将图甲简化成如图乙所示的杠杆,不计自重。若铅球质量m=3 kg,OA=0.03 m,OB=0.30 m,求此时肱二头肌对前臂产生的拉力F1的大小。(g取10 N/kg)
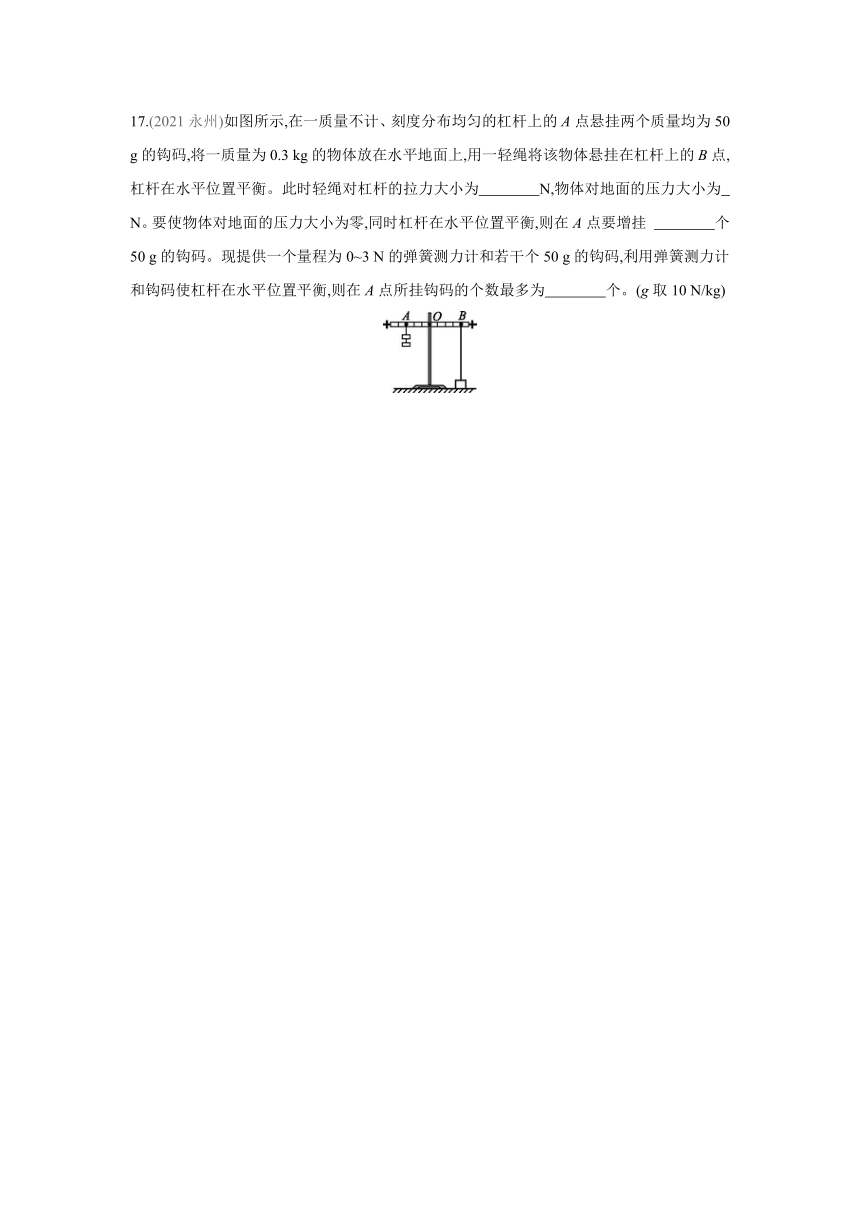
17.(2021永州)如图所示,在一质量不计、刻度分布均匀的杠杆上的A点悬挂两个质量均为50 g的钩码,将一质量为0.3 kg的物体放在水平地面上,用一轻绳将该物体悬挂在杠杆上的B点,杠杆在水平位置平衡。此时轻绳对杠杆的拉力大小为 N,物体对地面的压力大小为 N。要使物体对地面的压力大小为零,同时杠杆在水平位置平衡,则在A点要增挂 个50 g的钩码。现提供一个量程为0~3 N的弹簧测力计和若干个50 g的钩码,利用弹簧测力计和钩码使杠杆在水平位置平衡,则在A点所挂钩码的个数最多为 个。(g取10 N/kg)
第2课时 杠杆的运用
1 单一杠杆类型的判断
1.(2021金华)图中的日常工具在使用时属于费力杠杆的是 ( )
2.在如图所示的四种剪刀中,最适合用于剪开较硬物体的是 ( )
(1)将题中模型抽象为杠杆,并确定杠杆的支点。
(2)画出杠杆的动力和阻力。
(3)作出杠杆的动力臂和阻力臂。
(4)比较动力臂和阻力臂的大小,若动力臂大于阻力臂,则是省力杠杆;若动力臂小于阻力臂,则是费力杠杆。
2 复合杠杆类型的判断
3.指甲刀是生活中常用的小工具,如图所示,它包含三个杠杆,下列关于这三个杠杆的说法中正确的是 ( )
A.一个省力杠杆,两个费力杠杆 B.一个费力杠杆,两个省力杠杆
C.三个都是省力杠杆 D.三个都是费力杠杆
4.室内垃圾桶平时桶盖关闭,使用时用脚踩踏板,桶盖开启,根据室内垃圾桶的结构示意图(如图所示),可确定桶中有两个杠杆在起作用,两杠杆的支点分别为O1、O2,则对应的杠杆分别是( )
A.省力杠杆、省力杠杆 B.省力杠杆、费力杠杆
C.费力杠杆、费力杠杆 D.费力杠杆、省力杠杆
3 力的最小值问题
5.(2021益阳)如图所示,装满物品的拉杆式旅行箱总重为60 N,其重心在箱体的几何中心,图中AB与BC等长。现将平放在水平地面上的该旅行箱的C端抬离地面,至少需用力
N。
6.(2021黑龙江)如图所示,OAB为一可绕O点自由转动的轻质杠杆,OA垂直于AB,且OA长度为40 cm,AB长度为30 cm,在OA中点C处挂一质量为1 kg的物块,要求在端点B处施加一个最小的力F,使杠杆在图示位置平衡,则力F的力臂应是 cm,最小的力F是
N。(g取10 N/kg)
7.(2020黔东南州)如图所示,用一根细绳将杠杆AOB在O点悬挂起来,B处挂一重物G,请你在杠杆上画出最小的动力F1及动力臂l1,使杠杆在图中位置平衡。
4 动态杠杆问题
8.(2021枣庄)如图所示,一根质地均匀的木杆可绕O点自由转动,在木杆的右端施加一个始终垂直于木杆的作用力F,使木杆从OA位置匀速转到OB位置,在此过程中,力F的大小将 ( )
A.先变大,后变小 B.先变小,后变大
C.一直是变大的 D.一直是变小的
9.如图所示,用一个始终水平向右的力F,把轻质杠杆OA从图示位置缓慢拉至水平的过程中,力F的大小将 ( )
A.变大 B.不变
C.变小 D.不能确定
10.如图所示,在轻质杠杆中点处悬挂重物,在杠杆的最右端施加一个竖直向上的力F,杠杆保持平衡,保持力F的方向不变。若将重物向右移动,要使杠杆保持平衡,力F将 ;若将杠杆沿顺时针方向缓慢转动,力F将 。(均选填“变大”“变小”或“不变”)
11.如图所示是某起重机的示意图。当重物由主梁右端缓慢移向支点O的过程中,拉力F与重物到支点O的距离s的关系图像是图中的 ( )
12.如图所示,质量分布不均匀的木条AB重24 N,A、B是木条两端,O、C是木条上的两个点,AO=BO,AC=OC,此时弹簧测力计乙的示数是18 N。现将弹簧测力计甲的位置从A点平移到C点,此时弹簧测力计甲的示数是 ( )
A.18 N B.16 N
C.12 N D.8 N
第1课时
1.B 杠杆可以是直的,也可以是弯曲的,A错误;支点是杠杆的五要素之一,B正确;力臂是从支点到力的作用线的距离,简单地说,就是“点到线”的距离,而不是“点到点”的距离,力臂不一定在杠杆上,C、D错误。
2.D 由题意可知,该装置的目的是能更轻松地把图钉拔出来,即用力向上撬杠杆的A点,杠杆绕着D点顺时针转动,使图钉被拔出,故D点是支点。
3.D 在开启瓶盖的过程中,起瓶器绕A点转动,则A点是支点;瓶盖的B点被撬起,则B点是阻力作用点;杠杆绕A点逆时针旋转,则动力方向向上。
4.A 在订书机的N点按压时,订书机会绕着其左边的固定点转动,左边的这个点为支点,N点是动力作用点,动力方向向下;而纸条对订书机有一个向上的阻力,M点就是阻力作用点,阻力方向向上。
5.C B
6.如图所示
7.如图所示
8.如图所示
9.如图所示
将力F1的作用线反向延长,过支点O作力F1作用线的垂线,则垂线段的长度即为力F1的力臂l1;过力臂l2的右端,作垂直于l2的直线(注意虚实的区分),与杠杆OA的交点为力F2的作用点,方向斜向右上方。
10.D 左侧2格处挂3个钩码,右侧3格处挂2个钩码,根据杠杆平衡条件可知,杠杆处于水平平衡;两侧钩码同时向支点移动一格,即左侧1格处挂3个钩码,右侧2格处挂2个钩码,此时杠杆不会水平平衡,A不符合题意;两侧钩码下方同时加挂一个钩码,即左侧2格处挂4个钩码,右侧3格处挂3个钩码,此时杠杆不会水平平衡,B不符合题意;左侧加挂一个钩码,右侧加挂两个钩码,即左侧2格处挂4个钩码,右侧3格处挂4个钩码,此时杠杆不会水平平衡,C不符合题意;左侧拿去一个钩码,右侧钩码向左移动一格,即左侧2格处挂2个钩码,右侧2格处挂2个钩码,此时杠杆水平平衡,D符合题意。
11.D 由图可知,“标”“本”表示力臂,“权”“重”表示力,A错误;图中的O点表示支点,B错误;“权”小于“重”时,根据杠杆的平衡条件“权”ד标”=“重”ד本”可知,当“标”大于“本”时,秤可能在水平位置平衡,所以A端不一定上扬,C错误;根据杠杆的平衡条件可知,增大“重”时,应增大“权”的力臂,将“权”向A端移动,D正确。
12.1∶5 12
由杠杆的平衡条件可得,==;当此杠杆受到的阻力是60 N时,由杠杆的平衡条件可得,F1'×5=60 N×1,解得动力F1'=12 N。
13.100 竖直向上
由题意可知,O为支点,B点受到物体C竖直向下的拉力即为阻力,A点受到竖直向上的力即为动力;由图可知,OB=OA+AB=0.2 m+0.6 m=0.8 m,;由杠杆的平衡条件得,F×OA=G×OB,则F===100 N。
14.4 2
当弹簧测力计在A点斜向上(与水平方向成30°角)拉杠杆,使杠杆在水平位置平衡时,动力臂为l1=OA=×4×2 cm=4 cm;由图知,弹簧测力计的示数为3 N,根据杠杆的平衡条件可得,F1l1=Gl2,则G===2 N。
15.[设计实验与进行实验](1)左 (3)数量
[分析与论证]一和二 方向 二 刻度尺 力的作用线
16.由图可知,支点是O点,肱二头肌对前臂产生的拉力F1为动力,3 kg铅球的重力即为阻力F2,
则阻力为F2=G=mg=3 kg×10 N/kg=30 N,
由图知,l1=OA=0.03 m,l2=OB=0.30 m,
根据杠杆的平衡条件可得,F1l1=F2l2,
则F1×0.03 m=30 N×0.30 m,
解得F1=300 N。
17.0.75 2.25 6 10 两个质量均为50 g的钩码的重力:G=mg=0.1 kg×10 N/kg=1 N,设杠杆上每个小格的长度为l,杠杆在水平位置平衡,根据杠杆的平衡条件可知,F1l1=Gl2,即F1×4l=1 N×3l,解得F1=0.75 N;物体的重力:G'=m'g=0.3 kg×10 N/kg=3 N,
物体受到竖直向下的重力、竖直向上的支持力和拉力的作用,则地面对物体的支持力:F支=G'-
F1=3 N-0.75 N=2.25 N,地面对物体的支持力和物体对地面的压力是一对相互作用力,大小相等,所以物体对地面的压力为F压=F支=2.25 N;要使物体对地面的压力大小为零,同时杠杆在水平位置平衡,此时物体对杠杆的拉力为3 N;根据杠杆的平衡条件可知,3 N×4l=G″×3l,解得G″=4 N;每个钩码的重力为0.5 N,则A端所挂钩码的个数:n==8,增挂的钩码个数为6个;钩码对杠杆拉力的力臂不变,当弹簧测力计示数最大、弹簧测力计对杠杆拉力的力臂最大时,A点所挂钩码个数最多,弹簧测力计的最大测量值为3 N,最大力臂为5l,根据杠杆的平衡条件可知,3 N×5l=GA×3l,解得GA=5 N,每个钩码的重力为0.5 N,则A点所挂钩码的个数最多为n'==10。
第2课时
1.C
2.D 用剪刀剪开较硬的物体,所用的剪刀应动力臂很大,阻力臂很小。
3.A 指甲刀包含三个杠杆:ABC、OBD和OED,分别比较它们各自的动力臂和阻力臂的大小,可知ABC是省力杠杆,OBD和OED都是费力杠杆,选项A正确。
4.B 脚踩踏板时,支点O1对应的杠杆起作用,其动力臂大于阻力臂,该杠杆是省力杠杆;桶盖开启时,支点O2对应的杠杆起作用,其动力臂小于阻力臂,该杠杆是费力杠杆。
5.15 由图可知,支点为A点,阻力为箱体的重力,阻力臂为AB,动力臂为AC,因为AB=BC,所以l阻=l动,由杠杆的平衡条件得,F动l动=F阻l阻,则F动==60 N×=15 N。
6.50 4 在B点施加一个最小的力,则力臂应最大,当OB作为力臂时,动力臂是最大的,动力最小,
OA=40 cm,AB=30 cm,根据勾股定理可知,
OB==50 cm;
OC=20 cm,
根据杠杆的平衡条件可知,G×OC=F×OB,
则mg×OC=F×OB,代入数据得,1 kg×10 N/kg×20 cm=F×50 cm,解得F=4 N。
7.如图所示
根据杠杆的平衡条件可知,在阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长;由图知,B点离支点最远,故最长的动力臂为OB;过B点作垂直于OB的作用力F1,为使杠杆平衡,动力的方向应垂直于OB向上。
8.A 根据杠杆的平衡条件分析,将杠杆缓慢地由OA位置拉到水平位置时,动力臂不变,阻力为杠杆的重力,大小不变,阻力臂变大,所以动力变大;当将杠杆从水平位置拉到OB位置时,动力臂不变,阻力不变,阻力臂变小,所以动力变小,故F先变大后变小。
9.A 由题意可知,用一个始终水平向右的力F,把轻质杠杆OA从图示位置缓慢拉至水平的过程中,阻力的大小(即物体重力G)不变,阻力臂变大,动力臂变小,根据杠杆的平衡条件可知,动力将变大。
10.变大 不变
(1)由题意可知,力F保持竖直向上的方向不变,将重物向右移动时,F的力臂l1不变,阻力G不变,但阻力臂l2变大;由杠杆的平衡条件可得,Fl1=Gl2,故力F将变大。
(2)由于重物悬挂在杠杆的中点,则杠杆水平平衡时,动力臂和阻力臂的关系为l1=2l2;保持力F的方向不变,若将杠杆沿顺时针方向缓慢转动,由相似三角形的知识可知,动力臂和阻力臂的关系仍为l1'=2l2';由于阻力G不变,动力臂与阻力臂的比值不变,由杠杆的平衡条件可知,动力F的大小始终等于G,即力F将不变。
11.A 当重物由主梁右端缓慢移向支点O的过程中,以左侧的支柱为支点,拉力F为动力,重物对杠杆的拉力,大小等于物体的重力G,动力臂为整个主梁的长度,设为l,阻力臂为s,根据杠杆的平衡条件得,Fl=Gs,则拉力为F=G,由关系式知,拉力F与重物到支点O的距离s成一次函数关系,且拉力F随s的减小而减小,故A符合题意。
12.D 设木条重心在D点,当弹簧测力计甲在A点,弹簧测力计乙在B点时,以A点为支点。如图所示,
由杠杆的平衡条件有FB×AB=G×AD,
代入数据得:18 N×AB=24 N×AD,
所以3AB=4AD,AD=AB,
当弹簧测力计甲在C点时,以B为支点,此时弹簧测力计甲的示数为FC。如图所示,
因为AO=BO,AC=OC,所以CO=OD=BD,BC=AB,BD=AB,
由杠杆的平衡条件得,FC×BC=G×BD,即FC×AB=24 N×AB,
所以FC=8 N,则弹簧测力计甲的示数为8 N。
第1课时 杠杆
1 杠杆及其要素
1.下列关于杠杆的说法中正确的是 ( )
A.杠杆必须是一根直棒 B.杠杆一定要有支点
C.力臂必须在杠杆上 D.力臂就是力的作用点到支点的距离
2.如图所示,这款图钉来自一个初中生的创意,翘起部分为我们预留下施力空间。当拔起图钉时,将图钉看作杠杆,其支点为 ( )
A.A点 B.B点
C.C点 D.D点
3.如图所示,在用起瓶器开启瓶盖时,起瓶器可看作 ( )
A.以B为支点,动力方向向下的杠杆 B.以B为支点,动力方向向上的杠杆
C.以A为支点,动力方向向下的杠杆 D.以A为支点,动力方向向上的杠杆
4.如图所示,小明在按压式订书机的N点施加压力,将订书钉订入M点下方的纸条中,图1中能正确表示他使用该订书机时的杠杆示意图的是( )
5.如图所示是一辆装满各种货物的手推车,当手推车前轮遇到障碍物A时,售货员向下按压扶手,这时手推车可看作杠杆,支点是 点;当后轮遇到障碍物时,售货员向上提扶手,这时支点是 点。(均选填“A”“B”或“C”)
2 力臂作图
6.(2021南通)如图所示,此时轻质杠杆平衡,请作出动力F1的力臂l1和杠杆所受阻力F2的示意图。
7.(2021福建)在图中画出使用铡刀时动力F的力臂l。
8.如图甲所示是文具用品燕尾夹,图乙是它的侧面图,使用时,在C点用力向下压即可打开夹子,请在图乙中画出动力F1的力臂l1。
9.杠杆AO在力F1、F2的作用下处于静止状态,l2是力F2的力臂,请在图中画出力F1 的力臂l1和力F2的示意图。
3 杠杆的平衡条件
10.(2021泰州)如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡。下列操作中,仍能使杠杆在水平位置平衡的是(所用钩码均相同) ( )
A.两侧钩码同时向支点移动一格
B.两侧钩码下方同时加挂一个钩码
C.左侧加挂一个钩码,右侧加挂两个钩码
D.左侧拿去一个钩码,右侧钩码向左移动一格
11.(2021衡阳)如图所示,我国古代《墨经》最早记述了秤的杠杆原理,下列有关它的说法正确的是 ( )
A.“标”“本”表示力,“权”“重”表示力臂
B.图中的B点为杠杆的支点
C.“权”小于“重”时,A端一定上扬
D.增大“重”时,应把“权”向A端移动
12.一个杠杆处于平衡状态时的动力臂与阻力臂之比为5∶1,则动力与阻力之比为 ;若此杠杆受到的阻力为60 N,则动力为 N。
13.如图所示是某高压蒸气压力控制装置的示意图。当阀门受到的蒸气压力超过其安全值时,阀门就会被顶起释放一些蒸气来降低压力,该装置相当于一个杠杆。若OA=0.2 m,
AB=0.6 m,物体C重为25 N,则杠杆平衡时,杆上的A点所受的力为 N,方向是 。(忽略杆重)
14.如图所示,在“探究杠杆平衡条件”的实验中,已知杠杆上每个小格的长度为2 cm,当弹簧测力计在A点斜向上(与水平方向成30°角)拉杠杆,使杠杆在水平位置平衡时,动力臂为
cm,钩码总重为 N 。
15.(2021江西)[探究名称] 探究杠杆的平衡条件。
[猜想与假设]
猜想一:动力×动力臂=阻力×阻力臂;
猜想二:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。
[设计实验与进行实验]
(1)如图甲所示,应将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如下表所示。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如下表所示。
实验次数 动力F1/N OB间距 离/cm 阻力F2/N OA间距 离/cm
小明 1 1.0 5 0.5 10
2 1.5 10 1.0 15
3 1.0 10 2.0 5
小红和 小明 4 0.8 15 1.0 10
5 1.4 15 1.0 10
[分析与论证]
根据小明同学的数据可验证猜想 (选填“一”“二”或“一和二”)是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的 进行实验。于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。通过以上探究,小明同学真正理解了力臂是支点到 的距离。
16.如图甲所示为前臂平伸,用手掌托住铅球时的情形。我们可将图甲简化成如图乙所示的杠杆,不计自重。若铅球质量m=3 kg,OA=0.03 m,OB=0.30 m,求此时肱二头肌对前臂产生的拉力F1的大小。(g取10 N/kg)
17.(2021永州)如图所示,在一质量不计、刻度分布均匀的杠杆上的A点悬挂两个质量均为50 g的钩码,将一质量为0.3 kg的物体放在水平地面上,用一轻绳将该物体悬挂在杠杆上的B点,杠杆在水平位置平衡。此时轻绳对杠杆的拉力大小为 N,物体对地面的压力大小为 N。要使物体对地面的压力大小为零,同时杠杆在水平位置平衡,则在A点要增挂 个50 g的钩码。现提供一个量程为0~3 N的弹簧测力计和若干个50 g的钩码,利用弹簧测力计和钩码使杠杆在水平位置平衡,则在A点所挂钩码的个数最多为 个。(g取10 N/kg)
第2课时 杠杆的运用
1 单一杠杆类型的判断
1.(2021金华)图中的日常工具在使用时属于费力杠杆的是 ( )
2.在如图所示的四种剪刀中,最适合用于剪开较硬物体的是 ( )
(1)将题中模型抽象为杠杆,并确定杠杆的支点。
(2)画出杠杆的动力和阻力。
(3)作出杠杆的动力臂和阻力臂。
(4)比较动力臂和阻力臂的大小,若动力臂大于阻力臂,则是省力杠杆;若动力臂小于阻力臂,则是费力杠杆。
2 复合杠杆类型的判断
3.指甲刀是生活中常用的小工具,如图所示,它包含三个杠杆,下列关于这三个杠杆的说法中正确的是 ( )
A.一个省力杠杆,两个费力杠杆 B.一个费力杠杆,两个省力杠杆
C.三个都是省力杠杆 D.三个都是费力杠杆
4.室内垃圾桶平时桶盖关闭,使用时用脚踩踏板,桶盖开启,根据室内垃圾桶的结构示意图(如图所示),可确定桶中有两个杠杆在起作用,两杠杆的支点分别为O1、O2,则对应的杠杆分别是( )
A.省力杠杆、省力杠杆 B.省力杠杆、费力杠杆
C.费力杠杆、费力杠杆 D.费力杠杆、省力杠杆
3 力的最小值问题
5.(2021益阳)如图所示,装满物品的拉杆式旅行箱总重为60 N,其重心在箱体的几何中心,图中AB与BC等长。现将平放在水平地面上的该旅行箱的C端抬离地面,至少需用力
N。
6.(2021黑龙江)如图所示,OAB为一可绕O点自由转动的轻质杠杆,OA垂直于AB,且OA长度为40 cm,AB长度为30 cm,在OA中点C处挂一质量为1 kg的物块,要求在端点B处施加一个最小的力F,使杠杆在图示位置平衡,则力F的力臂应是 cm,最小的力F是
N。(g取10 N/kg)
7.(2020黔东南州)如图所示,用一根细绳将杠杆AOB在O点悬挂起来,B处挂一重物G,请你在杠杆上画出最小的动力F1及动力臂l1,使杠杆在图中位置平衡。
4 动态杠杆问题
8.(2021枣庄)如图所示,一根质地均匀的木杆可绕O点自由转动,在木杆的右端施加一个始终垂直于木杆的作用力F,使木杆从OA位置匀速转到OB位置,在此过程中,力F的大小将 ( )
A.先变大,后变小 B.先变小,后变大
C.一直是变大的 D.一直是变小的
9.如图所示,用一个始终水平向右的力F,把轻质杠杆OA从图示位置缓慢拉至水平的过程中,力F的大小将 ( )
A.变大 B.不变
C.变小 D.不能确定
10.如图所示,在轻质杠杆中点处悬挂重物,在杠杆的最右端施加一个竖直向上的力F,杠杆保持平衡,保持力F的方向不变。若将重物向右移动,要使杠杆保持平衡,力F将 ;若将杠杆沿顺时针方向缓慢转动,力F将 。(均选填“变大”“变小”或“不变”)
11.如图所示是某起重机的示意图。当重物由主梁右端缓慢移向支点O的过程中,拉力F与重物到支点O的距离s的关系图像是图中的 ( )
12.如图所示,质量分布不均匀的木条AB重24 N,A、B是木条两端,O、C是木条上的两个点,AO=BO,AC=OC,此时弹簧测力计乙的示数是18 N。现将弹簧测力计甲的位置从A点平移到C点,此时弹簧测力计甲的示数是 ( )
A.18 N B.16 N
C.12 N D.8 N
第1课时
1.B 杠杆可以是直的,也可以是弯曲的,A错误;支点是杠杆的五要素之一,B正确;力臂是从支点到力的作用线的距离,简单地说,就是“点到线”的距离,而不是“点到点”的距离,力臂不一定在杠杆上,C、D错误。
2.D 由题意可知,该装置的目的是能更轻松地把图钉拔出来,即用力向上撬杠杆的A点,杠杆绕着D点顺时针转动,使图钉被拔出,故D点是支点。
3.D 在开启瓶盖的过程中,起瓶器绕A点转动,则A点是支点;瓶盖的B点被撬起,则B点是阻力作用点;杠杆绕A点逆时针旋转,则动力方向向上。
4.A 在订书机的N点按压时,订书机会绕着其左边的固定点转动,左边的这个点为支点,N点是动力作用点,动力方向向下;而纸条对订书机有一个向上的阻力,M点就是阻力作用点,阻力方向向上。
5.C B
6.如图所示
7.如图所示
8.如图所示
9.如图所示
将力F1的作用线反向延长,过支点O作力F1作用线的垂线,则垂线段的长度即为力F1的力臂l1;过力臂l2的右端,作垂直于l2的直线(注意虚实的区分),与杠杆OA的交点为力F2的作用点,方向斜向右上方。
10.D 左侧2格处挂3个钩码,右侧3格处挂2个钩码,根据杠杆平衡条件可知,杠杆处于水平平衡;两侧钩码同时向支点移动一格,即左侧1格处挂3个钩码,右侧2格处挂2个钩码,此时杠杆不会水平平衡,A不符合题意;两侧钩码下方同时加挂一个钩码,即左侧2格处挂4个钩码,右侧3格处挂3个钩码,此时杠杆不会水平平衡,B不符合题意;左侧加挂一个钩码,右侧加挂两个钩码,即左侧2格处挂4个钩码,右侧3格处挂4个钩码,此时杠杆不会水平平衡,C不符合题意;左侧拿去一个钩码,右侧钩码向左移动一格,即左侧2格处挂2个钩码,右侧2格处挂2个钩码,此时杠杆水平平衡,D符合题意。
11.D 由图可知,“标”“本”表示力臂,“权”“重”表示力,A错误;图中的O点表示支点,B错误;“权”小于“重”时,根据杠杆的平衡条件“权”ד标”=“重”ד本”可知,当“标”大于“本”时,秤可能在水平位置平衡,所以A端不一定上扬,C错误;根据杠杆的平衡条件可知,增大“重”时,应增大“权”的力臂,将“权”向A端移动,D正确。
12.1∶5 12
由杠杆的平衡条件可得,==;当此杠杆受到的阻力是60 N时,由杠杆的平衡条件可得,F1'×5=60 N×1,解得动力F1'=12 N。
13.100 竖直向上
由题意可知,O为支点,B点受到物体C竖直向下的拉力即为阻力,A点受到竖直向上的力即为动力;由图可知,OB=OA+AB=0.2 m+0.6 m=0.8 m,;由杠杆的平衡条件得,F×OA=G×OB,则F===100 N。
14.4 2
当弹簧测力计在A点斜向上(与水平方向成30°角)拉杠杆,使杠杆在水平位置平衡时,动力臂为l1=OA=×4×2 cm=4 cm;由图知,弹簧测力计的示数为3 N,根据杠杆的平衡条件可得,F1l1=Gl2,则G===2 N。
15.[设计实验与进行实验](1)左 (3)数量
[分析与论证]一和二 方向 二 刻度尺 力的作用线
16.由图可知,支点是O点,肱二头肌对前臂产生的拉力F1为动力,3 kg铅球的重力即为阻力F2,
则阻力为F2=G=mg=3 kg×10 N/kg=30 N,
由图知,l1=OA=0.03 m,l2=OB=0.30 m,
根据杠杆的平衡条件可得,F1l1=F2l2,
则F1×0.03 m=30 N×0.30 m,
解得F1=300 N。
17.0.75 2.25 6 10 两个质量均为50 g的钩码的重力:G=mg=0.1 kg×10 N/kg=1 N,设杠杆上每个小格的长度为l,杠杆在水平位置平衡,根据杠杆的平衡条件可知,F1l1=Gl2,即F1×4l=1 N×3l,解得F1=0.75 N;物体的重力:G'=m'g=0.3 kg×10 N/kg=3 N,
物体受到竖直向下的重力、竖直向上的支持力和拉力的作用,则地面对物体的支持力:F支=G'-
F1=3 N-0.75 N=2.25 N,地面对物体的支持力和物体对地面的压力是一对相互作用力,大小相等,所以物体对地面的压力为F压=F支=2.25 N;要使物体对地面的压力大小为零,同时杠杆在水平位置平衡,此时物体对杠杆的拉力为3 N;根据杠杆的平衡条件可知,3 N×4l=G″×3l,解得G″=4 N;每个钩码的重力为0.5 N,则A端所挂钩码的个数:n==8,增挂的钩码个数为6个;钩码对杠杆拉力的力臂不变,当弹簧测力计示数最大、弹簧测力计对杠杆拉力的力臂最大时,A点所挂钩码个数最多,弹簧测力计的最大测量值为3 N,最大力臂为5l,根据杠杆的平衡条件可知,3 N×5l=GA×3l,解得GA=5 N,每个钩码的重力为0.5 N,则A点所挂钩码的个数最多为n'==10。
第2课时
1.C
2.D 用剪刀剪开较硬的物体,所用的剪刀应动力臂很大,阻力臂很小。
3.A 指甲刀包含三个杠杆:ABC、OBD和OED,分别比较它们各自的动力臂和阻力臂的大小,可知ABC是省力杠杆,OBD和OED都是费力杠杆,选项A正确。
4.B 脚踩踏板时,支点O1对应的杠杆起作用,其动力臂大于阻力臂,该杠杆是省力杠杆;桶盖开启时,支点O2对应的杠杆起作用,其动力臂小于阻力臂,该杠杆是费力杠杆。
5.15 由图可知,支点为A点,阻力为箱体的重力,阻力臂为AB,动力臂为AC,因为AB=BC,所以l阻=l动,由杠杆的平衡条件得,F动l动=F阻l阻,则F动==60 N×=15 N。
6.50 4 在B点施加一个最小的力,则力臂应最大,当OB作为力臂时,动力臂是最大的,动力最小,
OA=40 cm,AB=30 cm,根据勾股定理可知,
OB==50 cm;
OC=20 cm,
根据杠杆的平衡条件可知,G×OC=F×OB,
则mg×OC=F×OB,代入数据得,1 kg×10 N/kg×20 cm=F×50 cm,解得F=4 N。
7.如图所示
根据杠杆的平衡条件可知,在阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长;由图知,B点离支点最远,故最长的动力臂为OB;过B点作垂直于OB的作用力F1,为使杠杆平衡,动力的方向应垂直于OB向上。
8.A 根据杠杆的平衡条件分析,将杠杆缓慢地由OA位置拉到水平位置时,动力臂不变,阻力为杠杆的重力,大小不变,阻力臂变大,所以动力变大;当将杠杆从水平位置拉到OB位置时,动力臂不变,阻力不变,阻力臂变小,所以动力变小,故F先变大后变小。
9.A 由题意可知,用一个始终水平向右的力F,把轻质杠杆OA从图示位置缓慢拉至水平的过程中,阻力的大小(即物体重力G)不变,阻力臂变大,动力臂变小,根据杠杆的平衡条件可知,动力将变大。
10.变大 不变
(1)由题意可知,力F保持竖直向上的方向不变,将重物向右移动时,F的力臂l1不变,阻力G不变,但阻力臂l2变大;由杠杆的平衡条件可得,Fl1=Gl2,故力F将变大。
(2)由于重物悬挂在杠杆的中点,则杠杆水平平衡时,动力臂和阻力臂的关系为l1=2l2;保持力F的方向不变,若将杠杆沿顺时针方向缓慢转动,由相似三角形的知识可知,动力臂和阻力臂的关系仍为l1'=2l2';由于阻力G不变,动力臂与阻力臂的比值不变,由杠杆的平衡条件可知,动力F的大小始终等于G,即力F将不变。
11.A 当重物由主梁右端缓慢移向支点O的过程中,以左侧的支柱为支点,拉力F为动力,重物对杠杆的拉力,大小等于物体的重力G,动力臂为整个主梁的长度,设为l,阻力臂为s,根据杠杆的平衡条件得,Fl=Gs,则拉力为F=G,由关系式知,拉力F与重物到支点O的距离s成一次函数关系,且拉力F随s的减小而减小,故A符合题意。
12.D 设木条重心在D点,当弹簧测力计甲在A点,弹簧测力计乙在B点时,以A点为支点。如图所示,
由杠杆的平衡条件有FB×AB=G×AD,
代入数据得:18 N×AB=24 N×AD,
所以3AB=4AD,AD=AB,
当弹簧测力计甲在C点时,以B为支点,此时弹簧测力计甲的示数为FC。如图所示,
因为AO=BO,AC=OC,所以CO=OD=BD,BC=AB,BD=AB,
由杠杆的平衡条件得,FC×BC=G×BD,即FC×AB=24 N×AB,
所以FC=8 N,则弹簧测力计甲的示数为8 N。
同课章节目录
- 第一章 打开物理世界的大门
- 第一节 走进神奇
- 第二节 探索之路
- 第三节 站在巨人的肩膀上
- 第二章 运动的世界
- 第一节 动与静
- 第二节 长度与时间的测量
- 第三节 快与慢
- 第四节 科学探究:速度的变化
- 第三章 声的世界
- 第一节 科学探究:声音的产生与传播
- 第二节 声音的特性
- 第三节 超声与次声
- 第四章 多彩的光
- 第一节 光的反射
- 第二节 平面镜成像
- 第三节 光的折射
- 第四节 光的色散
- 第五节 科学探究:凸透镜成像
- 第六节 神奇的眼睛
- 第五章 质量与密度
- 第一节 质量
- 第二节 学习使用天平和量筒
- 第三节 科学探究:物质的密度
- 第四节 密度知识的应用
- 第六章 熟悉而陌生的力
- 第一节 力
- 第二节 怎样描述力
- 第三节 弹力与弹簧测力计
- 第四节 来自地球的力
- 第五节 科学探究:摩擦力
- 第七章 力与运动
- 第一节 科学探究:牛顿第一定律
- 第二节 力的合成
- 第三节 力的平衡
- 第八章 压强
- 第一节 压力的作用效果
- 第二节 科学探究:液体的压强
- 第三节 空气的“力量”
- 第四节 流体压强与流速的关系
- 第九章 浮力
- 第一节 认识浮力
- 第二节 阿基米德原理
- 第三节 物体的浮与沉
- 第十章 机械与人
- 第一节 科学探究:杠杆的平衡条件
- 第二节 滑轮及其应用
- 第三节 做功了吗
- 第四节 做功的快慢
- 第五节 机械效率
- 第六节 合理利用机械能
- 第十一章 小粒子与大宇宙
- 第一节 走进微观
- 第二节 看不见的运动
- 第三节 探索宇宙