人教版八年级下12.1杠杆同步练习(含解析)
文档属性
| 名称 | 人教版八年级下12.1杠杆同步练习(含解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 2.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-04-06 00:00:00 | ||
图片预览
文档简介
人教版八年级下 12.1 杠杆 同步练习
一、单选题
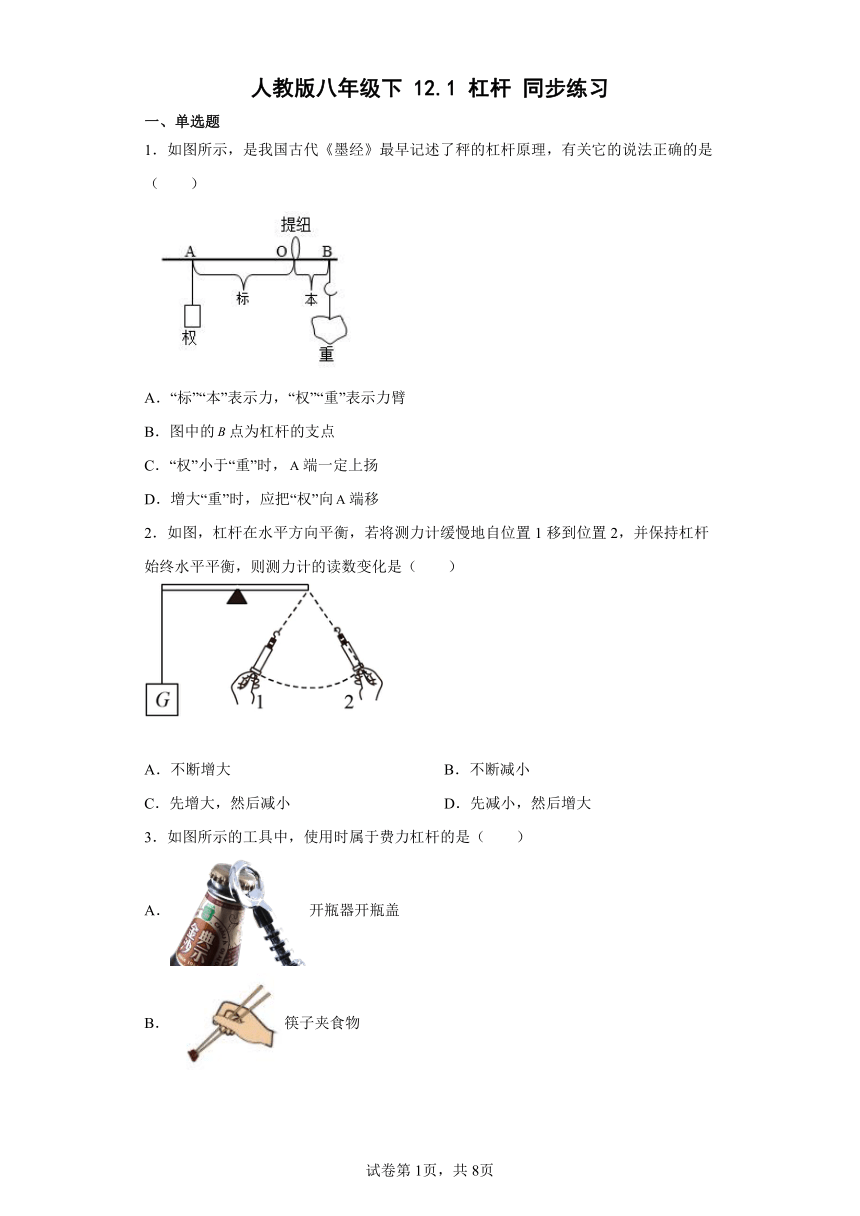
1.如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是( )
A.“标”“本”表示力,“权”“重”表示力臂
B.图中的点为杠杆的支点
C.“权”小于“重”时,端一定上扬
D.增大“重”时,应把“权”向端移
2.如图,杠杆在水平方向平衡,若将测力计缓慢地自位置1移到位置2,并保持杠杆始终水平平衡,则测力计的读数变化是( )
A.不断增大 B.不断减小
C.先增大,然后减小 D.先减小,然后增大
3.如图所示的工具中,使用时属于费力杠杆的是( )
A.开瓶器开瓶盖
B.筷子夹食物
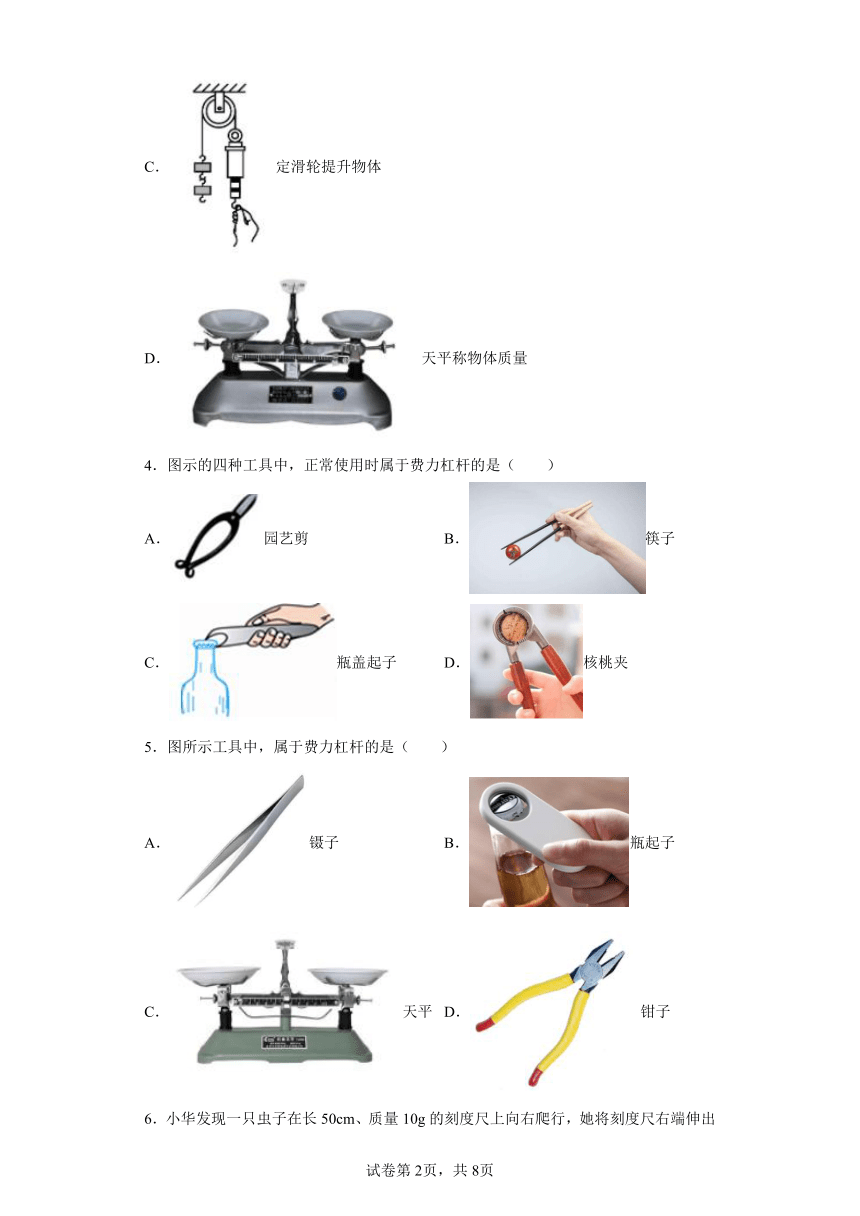
C.定滑轮提升物体
D.天平称物体质量
4.图示的四种工具中,正常使用时属于费力杠杆的是( )
A.园艺剪 B.筷子
C.瓶盖起子 D.核桃夹
5.图所示工具中,属于费力杠杆的是( )
A.镊子 B.瓶起子
C. 天平 D. 钳子
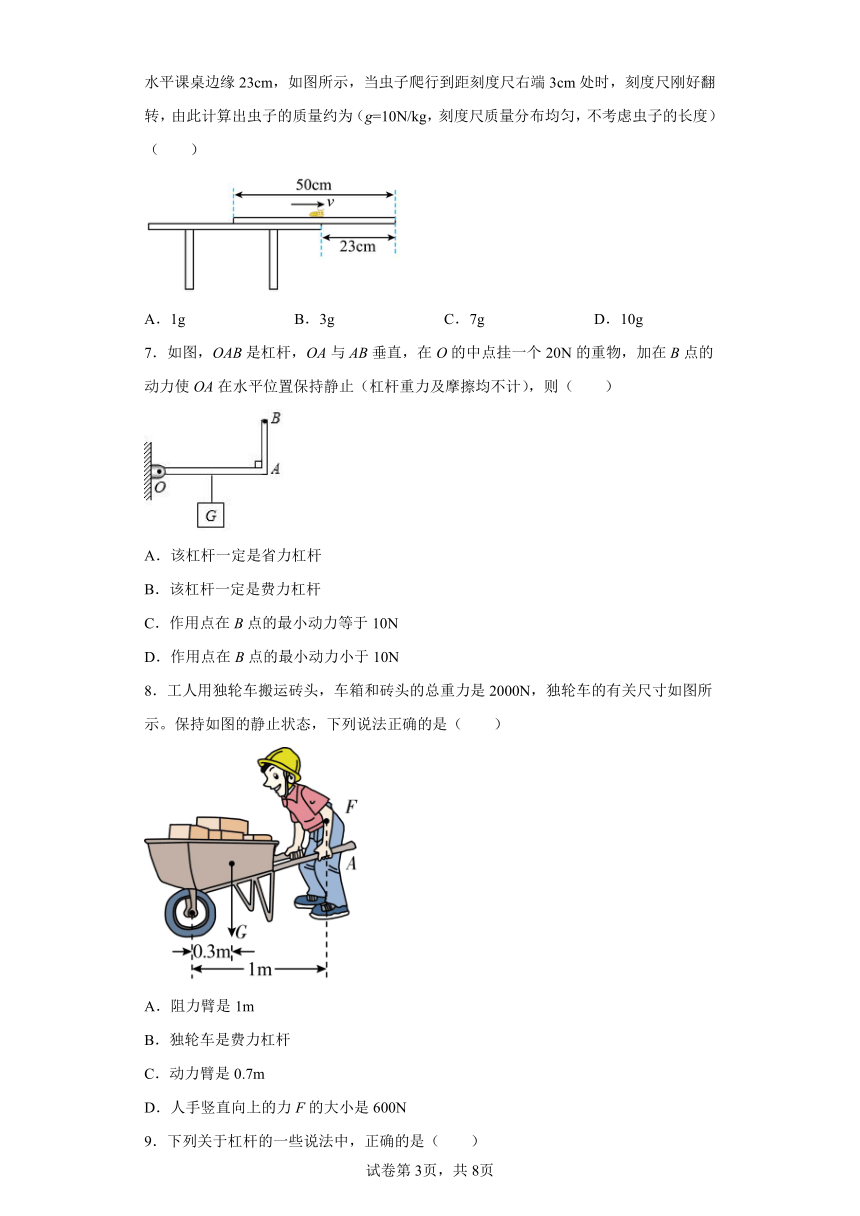
6.小华发现一只虫子在长50cm、质量10g的刻度尺上向右爬行,她将刻度尺右端伸出水平课桌边缘23cm,如图所示,当虫子爬行到距刻度尺右端3cm处时,刻度尺刚好翻转,由此计算出虫子的质量约为(g=10N/kg,刻度尺质量分布均匀,不考虑虫子的长度)( )
A.1g B.3g C.7g D.10g
7.如图,OAB是杠杆,OA与AB垂直,在O的中点挂一个20N的重物,加在B点的动力使OA在水平位置保持静止(杠杆重力及摩擦均不计),则( )
A.该杠杆一定是省力杠杆
B.该杠杆一定是费力杠杆
C.作用点在B点的最小动力等于10N
D.作用点在B点的最小动力小于10N
8.工人用独轮车搬运砖头,车箱和砖头的总重力是2000N,独轮车的有关尺寸如图所示。保持如图的静止状态,下列说法正确的是( )
A.阻力臂是1m
B.独轮车是费力杠杆
C.动力臂是0.7m
D.人手竖直向上的力F的大小是600N
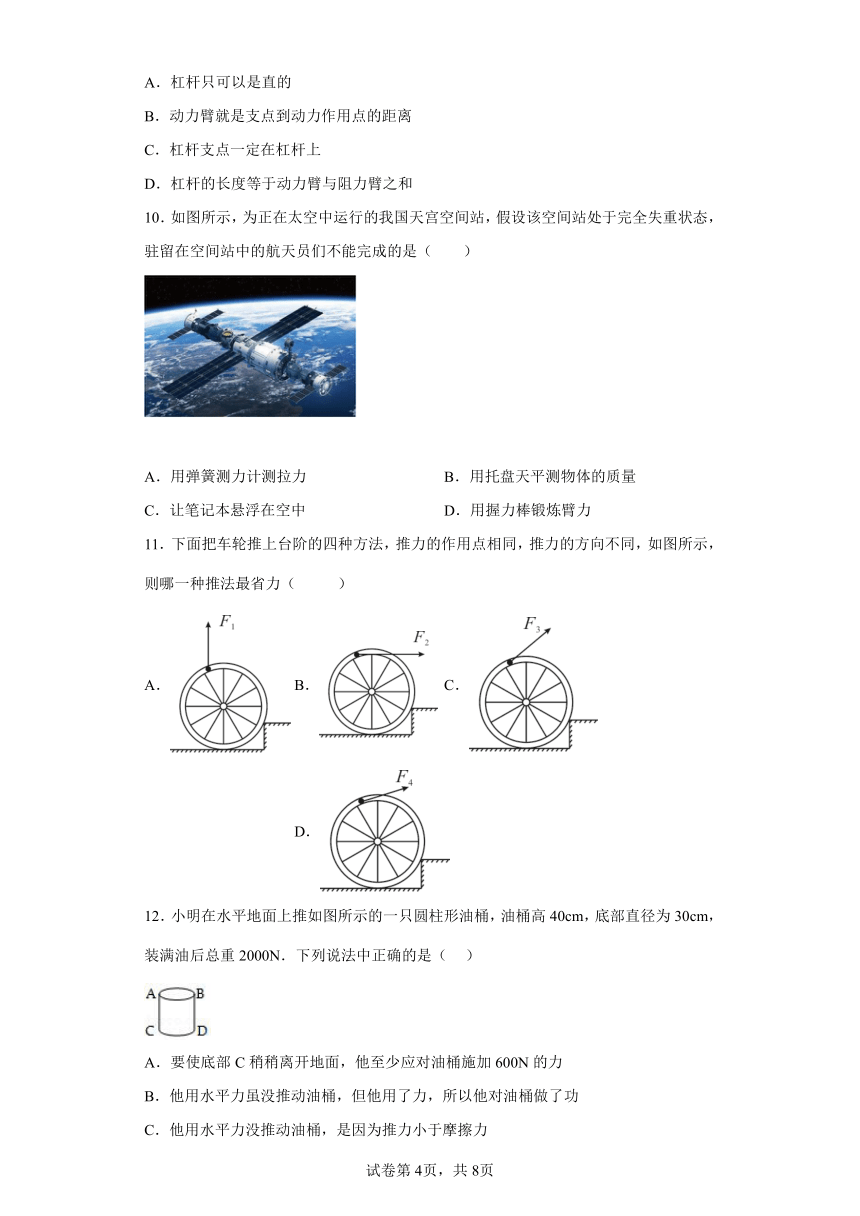
9.下列关于杠杆的一些说法中,正确的是( )
A.杠杆只可以是直的
B.动力臂就是支点到动力作用点的距离
C.杠杆支点一定在杠杆上
D.杠杆的长度等于动力臂与阻力臂之和
10.如图所示,为正在太空中运行的我国天宫空间站,假设该空间站处于完全失重状态,驻留在空间站中的航天员们不能完成的是( )
A.用弹簧测力计测拉力 B.用托盘天平测物体的质量
C.让笔记本悬浮在空中 D.用握力棒锻炼臂力
11.下面把车轮推上台阶的四种方法,推力的作用点相同,推力的方向不同,如图所示,则哪一种推法最省力( )
A. B. C. D.
12.小明在水平地面上推如图所示的一只圆柱形油桶,油桶高40cm,底部直径为30cm,装满油后总重2000N.下列说法中正确的是( )
A.要使底部C稍稍离开地面,他至少应对油桶施加600N的力
B.他用水平力虽没推动油桶,但他用了力,所以他对油桶做了功
C.他用水平力没推动油桶,是因为推力小于摩擦力
D.油桶匀速运动时,地面对油桶的支持力和油桶对地面的压力是平衡力
二、填空题
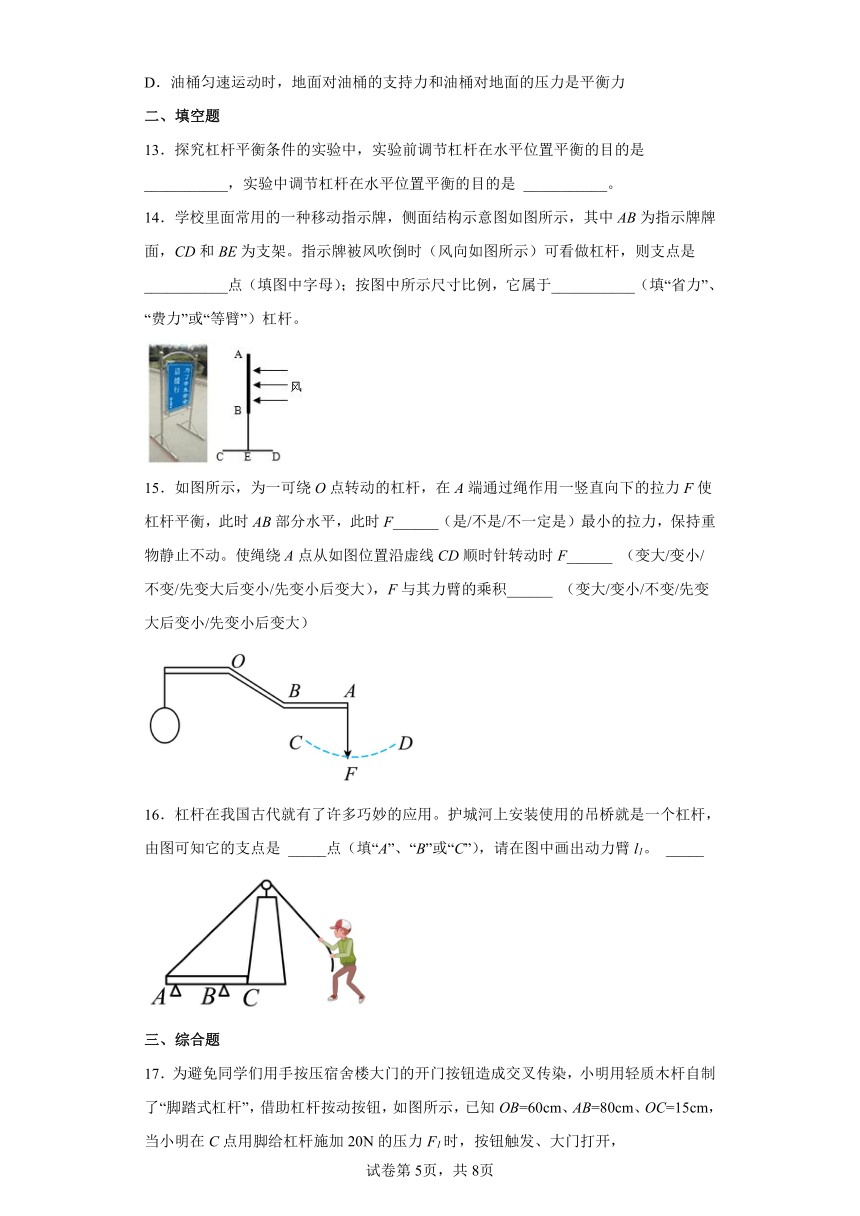
13.探究杠杆平衡条件的实验中,实验前调节杠杆在水平位置平衡的目的是 ___________,实验中调节杠杆在水平位置平衡的目的是 ___________。
14.学校里面常用的一种移动指示牌,侧面结构示意图如图所示,其中AB为指示牌牌面,CD和BE为支架。指示牌被风吹倒时(风向如图所示)可看做杠杆,则支点是___________点(填图中字母);按图中所示尺寸比例,它属于___________(填“省力”、“费力”或“等臂”)杠杆。
15.如图所示,为一可绕O点转动的杠杆,在A端通过绳作用一竖直向下的拉力F使杠杆平衡,此时AB部分水平,此时F______(是/不是/不一定是)最小的拉力,保持重物静止不动。使绳绕A点从如图位置沿虚线CD顺时针转动时F______ (变大/变小/不变/先变大后变小/先变小后变大),F与其力臂的乘积______ (变大/变小/不变/先变大后变小/先变小后变大)
16.杠杆在我国古代就有了许多巧妙的应用。护城河上安装使用的吊桥就是一个杠杆,由图可知它的支点是 _____点(填“A”、“B”或“C”),请在图中画出动力臂l1。 _____
三、综合题
17.为避免同学们用手按压宿舍楼大门的开门按钮造成交叉传染,小明用轻质木杆自制了“脚踏式杠杆”,借助杠杆按动按钮,如图所示,已知OB=60cm、AB=80cm、OC=15cm,当小明在C点用脚给杠杆施加20N的压力F1时,按钮触发、大门打开,
(1)请在图中作出动力F1的示意图。
(2)该杠杆属于哪种类型?(直接回答)
(3)求此时按钮对杠杆施加的水平阻力F2,有多大?
18.骨骼、肌肉和关节构成了人体的运动系统,踮脚是肌肉牵引骨骼绕关节转动产生的,可以将其看成杠杆模型,如图甲所示,G表示作用在该杠杆上的人的重力,F表示小腿肌肉对该杠杆的拉力.如图乙是小明将脚踮起时单只脚的受力示意图,已知小明的重力为600 N,小腿肌肉对这只脚的拉力竖直向上,小明在1 min内完成了40个双脚同时踮起的动作;脚跟踮起后,每只脚与水平地面的接触面积为。
(1)由图甲可知,踮脚时,可将脚看作一个______(选填“省力”“费力”或“等臂”)杠杆;假设重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,小腿肌肉对每只脚的拉力的大小将______(选填“变大”“不变”或“变小”)。
(2)脚跟踮起后,小明对水平地面的压强是多少______?
(3)脚跟踮起后,小腿肌肉对每只脚的拉力是多少______?
(4)小明在踮脚过程中克服重力做功的功率是多少______?
19.小红用自制杠杆测物体的密度,装置如图所示。O为杠杆的支点,在杠杆上挂有重为50N的重物B,杠杆的左端通过细绳(绳的中间串一个弹簧测力计)跨过定滑轮悬吊着重物A处于静止状态,此时弹簧测力计的示数为30N,杠杆处于水平位置。现向容器C中缓慢注水,使A浸没,测力计示数变为20N。托起水杯,使A接触容器的底部,弹簧测力计的示数逐渐减为10N,同时移动物体B的悬挂点,使杠杆仍在水平位置平衡。若杠杆、弹簧测力计、细线和滑轮的质量以及一切摩擦均忽略不计,ρ水=1.0×103kg/km3,g=10N/kg。
(1)若杠杆长度为1m,在物体A悬空时,物体B的悬点位置与O的距离为______cm;
(2)物体A的密度为______g/cm3;
(3)物体B的悬挂点移动的距离与杆长之比为______;
(4)若考虑弹簧测力计的重力,测出物体A的密度将______(选填“偏大”“偏小”或“不变”),请说明理由______。
20.如图是玩具起重机将货物吊起停留在空中的的情景。O 为支点,F1为动力,F2为阻力。(吊杆的重力忽略不计)
(1)请画出动力 F1的力臂 l1,阻力 F2的力臂 l2___________
(2)起重机为___________(选填“省力”“费力”或“等臂”)杠杆,原因是___________。
21.如图所示为一拉杆旅行箱的示意图。将其视为杠杆,O为支点,B为重心,BC为竖直方向,A为拉杆端点,已知箱重为250N,OA长为120cm,OC长为24cm。
(1)图中在A点沿图示方向施加动力F,箱子静止,则动力F的力臂为______cm,F的大小为______N;
(2)使拉杆箱在图示位置静止的最小动力为______N;
(3)生活中,常把箱内较重物品靠近O点摆放,这样可使拉杆箱在图示位置静止的最小动力______(选填“变大”“变小”或“不变”)。
试卷第1页,共3页
试卷第1页,共3页
参考答案:
1.D
【详解】
A.“标”“本”表示力臂,“权”“重”表示力,故A错误;
B.杠杆绕着O转动,故O为支点,故B错误;
C.“权”小于“重”时,端可能上扬,因为杠杆平衡原理可知,平衡不仅与力有关还与力臂有关,故C错误;
D.增大“重”时,重与OB的乘积变大,在权不变的情况下可以增大标,故应把“权”向端移,故D正确。
故选D。
2.D
【详解】
1、2位置施力的力臂如图所示:
当施加的动力垂直于杠杆时,动力臂最长,因为杠杆始终在水平位置保持平衡,阻力和阻力臂一定,所以此时的动力最小;而在1、2位置施力时,动力臂较小,由杠杆平衡条件可知,此时动力较大;所以,从位置1移动到2的过程中,动力F先减小再增大,故ABC不符合题意,D符合题意。
故选D。
3.B
【详解】
A.起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;
B.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故B符合题意;
C.定滑轮实质是动力臂等于阻力臂的杠杆,是等臂杠杆,故C不符合题意;
D.天平的动力臂等于阻力臂,是等臂杠杆,故D不符合题意。
故选B。
4.B
【详解】
A.园艺剪在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;
B.筷子使用过程中,动力臂小于阻力臂,是费力杠杆,故B符合题意;
C.瓶盖起子使用过程中,动力臂大于阻力臂,是省力杠杆,故C不符合题意;
D.核桃夹使用过程中,动力臂大于阻力臂,是省力杠杆,故D不符合题意。
故选B。
5.A
【详解】
A.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故A符合题意;
B.瓶起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故B不符合题意;
C.天平在使用过程中,动力臂等于阻力臂,是等臂杠杆,故C不符合题意;
D.钳子在使用过程中,动力臂大于阻力臂,是省力杠杆,故D不符合题意。
故选A。
6.A
【详解】
根据题意知道,刻度尺的重心在25cm处,刻度尺刚好翻转时与桌沿的接触点为支点,则刻度尺重力的力臂为
L1 =25cm-23cm=2cm
虫子重力的力臂为
L2 =23cm-3cm=20cm
由杠杆平衡条件F1×L1 =F2×L2 及重力公式G=mg知道
G尺×L1 =G虫×L2
即
10g×2cm=m虫×20cm
解得m虫=1g,故A正确。
故选A。
7.D
【详解】
AB.因无法确定动力臂的大小,所以无法确定它是哪种杠杆,故AB不符合题意;
CD.加在B点的动力F与OB垂直向上时,动力作用线和杠杆垂直,支点与动力作用点之间的连线OB就是最长的动力臂,此时动力最小。因为C点是中点,所以
OB>OA=2OC
如图所示:
根据杠杆的平衡条件
F×OB=G×OC
此时的最小动力
故C不符合题意,D符合题意。
故选D。
8.D
【详解】
A.独轮车支点在车轮的轴上,动力是F,所以动力臂为1m,故A错误;
B.独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆,故B错误;
C.独轮车支点在车轮的轴上,阻力是G,所以动力臂为0.3m,故C错误;
D.由杠杆平衡条件可知,人手向上的力
故D正确。
故选D。
9.C
【详解】
A.杠杆可以是直的,也可以是弯曲的,故A错误;
B.动力臂就是支点到动力作用线的距离,故B错误;
C.杠杆的五要素之一就是支点,且支点一定作用在杠杆上,故C正确;
D.力臂不一定是杠杆的长度,也不一定在杠杆上,所以杠杆的长度不一定等于动力臂与阻力臂之和,故D错误。
故选C。
10.B
【详解】
A.太空中虽然失重,但弹簧的弹力依然存在,所以用弹簧测力计测拉力是能完成的,故A不合题意;
B.天平是等臂杠杆,根据杠杆的平衡条件可测量出物体的质量。而在失重状态下,物体不能产生对托盘的压力,故不能用托盘天平测物体的质量,故B符合题意;
C.太空中物体处于失重状态,因此,可以让笔记本悬浮在空中,故C不合题意;
D.太空中虽然失重,但弹力依然存在,所以用握力棒锻炼臂力是可行的,故D不合题意。
故选B。
11.C
【详解】
车轮与台阶的接触点即为支点,根据可知,车轮的重力即为阻力,重力的作用点在车轮的圆心处,故是一个定值,动力臂越大,则动力越小,由于推力的作用点相同,故连接推力的作用点和支点,将其作为动力臂,是最长的动力臂,做该连线的垂线,即力的作用线,如下图所示:
故C符合题意。
故选C。
12.A
【详解】
分析:(1)根据杠杆平衡原理,确定出使杠杆平衡的动力方向,然后利用几何关系求出力臂,再利用平衡条件求出最小拉力的大小.
(2)根据做功的条件分析;
(3)根据二力平衡分析;
(4)根据平衡力的条件分析.
解答:A、作用在B点的力,要使油桶C点稍离地面,必须以C点为支点,则BC作为动力臂最长,此时动力也最小,最省力,此时动力为F,阻力为G=2000N,动力臂,阻力臂
,由于,则最小拉力
,故A正确.
B、他用水平力没推动油桶,没在力的方向上通过距离,故不做功,故B错误;
C、他用水平力没推动油桶,油桶处于静止状态,推力等于摩擦力,故C错误;
D、地面对油桶的支持力和油桶对地面的压力没有作用在同一个物体上,不是平衡力,故D错误.
故选A.
【点睛】根据杠杆的平衡条件可知,在杠杆中的阻力、阻力臂一定的情况下,要使所使用的动力最小,必须使动力臂最长;而在通常情况下,连接杠杆中支点和动力作用点这两点所得到的线段是最长的.
13. 消除杠杆自重对杠杆平衡的影响,便于测量力臂 便于测量力臂
【详解】
[1]实验前,杠杆在水平位置平衡,使杠杆的重心通过支点,杠杆重力的力臂为零,其目的是消除杠杆自重对杠杆平衡的影响,便于测量力臂。
[2]实验中使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小。
14. C 省力
【详解】
[1]根据图示风向可知,当指示牌被风吹倒时,指示牌绕着C点转动,则支点为C点。如图所示:
[2]把风力看成动力,那阻力是指示牌重力,动力臂为l,阻力臂为CE,因为动力臂大于阻力臂,为省力杠杆。
15. 不是 先变小后变大 不变
【详解】
[1]阻力和阻力臂不变,动力臂越大,动力越小,连接OA,此时OA是最长动力臂,动力与OA垂直时,动力最小,如图所示:
此时AB部分水平,此时F不是最小力。
[2][3]已知阻力(物重)不变,阻力臂不变;由杠杆的平衡条件
F动l动=F阻l阻
知在F阻l阻不变的情况下,F与对应力臂的乘积不变,动力臂越长越省力;因此以OA为动力臂时,动力F最小;由图可知:当绳从图示位置沿顺时针方向旋转时,力F先变小后变大。
16. C
【详解】
[1]如图所示,在拉力的作用下吊桥绕着点C转动,所以它的支点在C点。
[2]动力作用在A点,方向沿绳子斜向上,过支点C做动力F作用线的垂线段,即为动力臂l1,如下图所示:
17.(1) ;(2)费力杠杆;(3)3.75N
(1)脚垂直作用在杠杆上,画出压力大小。
(2)从动力臂和阻力臂关系判断是省力杠杆还是费力杠杆。
(3)作出动力臂和阻力臂,根据杠杆平衡条件求出水平阻力大小。
【详解】
(1)小明脚对木杆的压力F1垂直作用的木杆上,如图所示:
。
(2)木杆是一个杠杆,O为支点,小明的脚施加的力是动力F1,动力臂为OC,按钮对木杆的压力为阻力F2,阻力臂为OD,动力臂OC小于阻力臂OD,所以木杆是费力杠杆。
(3)根据杠杆平衡条件得
F1×OC=F2×OD
按钮对木杆的压力水平向左,所以OD=AB,所以
20N×15×10-2m=F2×80×10-2m
解得:F2=3.75N。
答:(1)F1的示意图如图所示:
。
(2)该杠杆属于费力杠杆。
(3)此时按钮对杠杆施加的水平阻力F2是3.75N。
【点睛】
本题要作出动力臂和阻力臂,并且明确阻力臂和按钮的高度相同,这是解决本题的关键。
18. 省力 不变 200N 24W
【详解】
解:(1)[1][2]踮脚时,脚尖是支点,拉力是动力,脚承担的重力是阻力,此时动力臂大于阻力臂,因此可将脚看作一个省力杠杆;重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,重力的方向不变,但力臂在减小,同样拉力方向不变,但力臂在减小,但阻力臂和动力臂的比值始终不变,因此小腿肌肉对每只脚的拉力的大小不变。
(2)[3]小明对水平地面的压力
F压=G总=600N
受力面积
则小明对水平地面的压强
p===1.5×105Pa
(3)[4]图乙中,动力的力臂
阻力的力臂
每只脚承担人体重力的一半,因此
G1=G总=×600N=300N
根据杠杆的平衡条件,则小腿肌肉对单只脚的拉力
(4)[5]双脚踮起一次小腿肌肉对脚的拉力做的功
小明踮脚过程中克服重力做的功等于小腿肌肉对脚的拉力做的功
小明在1 min内完成40个双脚同时踮起动作克服重力所做的功
则小明踮脚过程中克服重力做功的功率
答:(1)可将脚看作一个省力杠杆,拉力的大小不变;
(2)小明对水平地面的压强为1.5×105Pa;
(3)小腿肌肉对每只脚的拉力为200N;
(4)小明在踮脚过程中克服重力做功的功率为24W。
19. 60 3 2∶5 偏小 测力计受重力,使得测力计示数小于物体A所受重力
【详解】
(1)[1]如图所示
根据杠杆的平衡条件得到F1OF=GBOB
30N×1m=50N×OB
OB=0.6m=60cm
(2)[2]由于滑轮为定滑轮,则
GA=F1=30N
当A浸没,测力计示数变为20N时。根据称重法可得
F浮=GA-F=30N-20N=10N
物体A的体积
V=V排==1×10-3m3
物体A的密度
=3×103kg/m3=3g/cm3
(3)[3]弹簧测力计的示数逐渐减为10N,根据杠杆的平衡条件得到
F2OC=GBOB′
10N×1m=50N×OB′
OB′=0.2m
所以,物体B的悬挂点移动的距离与杆长之比为
(0.6m-0.2m)∶1m=2∶5
(5)[4][5]若考虑弹簧测力计的重力,使得测力计示数小于物体A所受重力,A的重力就会偏小,测得A的质量就偏小;物体A的浮力与浸没的液体和排开的体积有关,没有影响浮力的计算,所以A测出的密度偏小。
20. 费力 见解析
【详解】
(1)[1]已知图中支点为O点,从支点作动力和阻力的作用线的垂线段,该垂线段分别为动力臂l1和阻力臂l2,如图所示:
(2)[2][3]由图可知,起重机在使用时,动力臂要小于阻力臂,动力大于阻力,为费力杠杆。
21. 60 100 50 变小
【详解】
(1)[1]在A点沿图示方向施加动力F,动力F的力臂是OA的一半,为60cm。
[2]由杠杆平衡条件可得F的大小为
(2)[3]使拉杆箱在图示位置静止的最长力臂是OA,最小动力为
(3)[4]把箱内较重物品靠近O点摆放,可减小阻力臂,由杠杆平衡条件可知,使拉杆箱在图示位置静止的最小动力变小。
答案第1页,共2页
答案第1页,共2页
一、单选题
1.如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是( )
A.“标”“本”表示力,“权”“重”表示力臂
B.图中的点为杠杆的支点
C.“权”小于“重”时,端一定上扬
D.增大“重”时,应把“权”向端移
2.如图,杠杆在水平方向平衡,若将测力计缓慢地自位置1移到位置2,并保持杠杆始终水平平衡,则测力计的读数变化是( )
A.不断增大 B.不断减小
C.先增大,然后减小 D.先减小,然后增大
3.如图所示的工具中,使用时属于费力杠杆的是( )
A.开瓶器开瓶盖
B.筷子夹食物
C.定滑轮提升物体
D.天平称物体质量
4.图示的四种工具中,正常使用时属于费力杠杆的是( )
A.园艺剪 B.筷子
C.瓶盖起子 D.核桃夹
5.图所示工具中,属于费力杠杆的是( )
A.镊子 B.瓶起子
C. 天平 D. 钳子
6.小华发现一只虫子在长50cm、质量10g的刻度尺上向右爬行,她将刻度尺右端伸出水平课桌边缘23cm,如图所示,当虫子爬行到距刻度尺右端3cm处时,刻度尺刚好翻转,由此计算出虫子的质量约为(g=10N/kg,刻度尺质量分布均匀,不考虑虫子的长度)( )
A.1g B.3g C.7g D.10g
7.如图,OAB是杠杆,OA与AB垂直,在O的中点挂一个20N的重物,加在B点的动力使OA在水平位置保持静止(杠杆重力及摩擦均不计),则( )
A.该杠杆一定是省力杠杆
B.该杠杆一定是费力杠杆
C.作用点在B点的最小动力等于10N
D.作用点在B点的最小动力小于10N
8.工人用独轮车搬运砖头,车箱和砖头的总重力是2000N,独轮车的有关尺寸如图所示。保持如图的静止状态,下列说法正确的是( )
A.阻力臂是1m
B.独轮车是费力杠杆
C.动力臂是0.7m
D.人手竖直向上的力F的大小是600N
9.下列关于杠杆的一些说法中,正确的是( )
A.杠杆只可以是直的
B.动力臂就是支点到动力作用点的距离
C.杠杆支点一定在杠杆上
D.杠杆的长度等于动力臂与阻力臂之和
10.如图所示,为正在太空中运行的我国天宫空间站,假设该空间站处于完全失重状态,驻留在空间站中的航天员们不能完成的是( )
A.用弹簧测力计测拉力 B.用托盘天平测物体的质量
C.让笔记本悬浮在空中 D.用握力棒锻炼臂力
11.下面把车轮推上台阶的四种方法,推力的作用点相同,推力的方向不同,如图所示,则哪一种推法最省力( )
A. B. C. D.
12.小明在水平地面上推如图所示的一只圆柱形油桶,油桶高40cm,底部直径为30cm,装满油后总重2000N.下列说法中正确的是( )
A.要使底部C稍稍离开地面,他至少应对油桶施加600N的力
B.他用水平力虽没推动油桶,但他用了力,所以他对油桶做了功
C.他用水平力没推动油桶,是因为推力小于摩擦力
D.油桶匀速运动时,地面对油桶的支持力和油桶对地面的压力是平衡力
二、填空题
13.探究杠杆平衡条件的实验中,实验前调节杠杆在水平位置平衡的目的是 ___________,实验中调节杠杆在水平位置平衡的目的是 ___________。
14.学校里面常用的一种移动指示牌,侧面结构示意图如图所示,其中AB为指示牌牌面,CD和BE为支架。指示牌被风吹倒时(风向如图所示)可看做杠杆,则支点是___________点(填图中字母);按图中所示尺寸比例,它属于___________(填“省力”、“费力”或“等臂”)杠杆。
15.如图所示,为一可绕O点转动的杠杆,在A端通过绳作用一竖直向下的拉力F使杠杆平衡,此时AB部分水平,此时F______(是/不是/不一定是)最小的拉力,保持重物静止不动。使绳绕A点从如图位置沿虚线CD顺时针转动时F______ (变大/变小/不变/先变大后变小/先变小后变大),F与其力臂的乘积______ (变大/变小/不变/先变大后变小/先变小后变大)
16.杠杆在我国古代就有了许多巧妙的应用。护城河上安装使用的吊桥就是一个杠杆,由图可知它的支点是 _____点(填“A”、“B”或“C”),请在图中画出动力臂l1。 _____
三、综合题
17.为避免同学们用手按压宿舍楼大门的开门按钮造成交叉传染,小明用轻质木杆自制了“脚踏式杠杆”,借助杠杆按动按钮,如图所示,已知OB=60cm、AB=80cm、OC=15cm,当小明在C点用脚给杠杆施加20N的压力F1时,按钮触发、大门打开,
(1)请在图中作出动力F1的示意图。
(2)该杠杆属于哪种类型?(直接回答)
(3)求此时按钮对杠杆施加的水平阻力F2,有多大?
18.骨骼、肌肉和关节构成了人体的运动系统,踮脚是肌肉牵引骨骼绕关节转动产生的,可以将其看成杠杆模型,如图甲所示,G表示作用在该杠杆上的人的重力,F表示小腿肌肉对该杠杆的拉力.如图乙是小明将脚踮起时单只脚的受力示意图,已知小明的重力为600 N,小腿肌肉对这只脚的拉力竖直向上,小明在1 min内完成了40个双脚同时踮起的动作;脚跟踮起后,每只脚与水平地面的接触面积为。
(1)由图甲可知,踮脚时,可将脚看作一个______(选填“省力”“费力”或“等臂”)杠杆;假设重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,小腿肌肉对每只脚的拉力的大小将______(选填“变大”“不变”或“变小”)。
(2)脚跟踮起后,小明对水平地面的压强是多少______?
(3)脚跟踮起后,小腿肌肉对每只脚的拉力是多少______?
(4)小明在踮脚过程中克服重力做功的功率是多少______?
19.小红用自制杠杆测物体的密度,装置如图所示。O为杠杆的支点,在杠杆上挂有重为50N的重物B,杠杆的左端通过细绳(绳的中间串一个弹簧测力计)跨过定滑轮悬吊着重物A处于静止状态,此时弹簧测力计的示数为30N,杠杆处于水平位置。现向容器C中缓慢注水,使A浸没,测力计示数变为20N。托起水杯,使A接触容器的底部,弹簧测力计的示数逐渐减为10N,同时移动物体B的悬挂点,使杠杆仍在水平位置平衡。若杠杆、弹簧测力计、细线和滑轮的质量以及一切摩擦均忽略不计,ρ水=1.0×103kg/km3,g=10N/kg。
(1)若杠杆长度为1m,在物体A悬空时,物体B的悬点位置与O的距离为______cm;
(2)物体A的密度为______g/cm3;
(3)物体B的悬挂点移动的距离与杆长之比为______;
(4)若考虑弹簧测力计的重力,测出物体A的密度将______(选填“偏大”“偏小”或“不变”),请说明理由______。
20.如图是玩具起重机将货物吊起停留在空中的的情景。O 为支点,F1为动力,F2为阻力。(吊杆的重力忽略不计)
(1)请画出动力 F1的力臂 l1,阻力 F2的力臂 l2___________
(2)起重机为___________(选填“省力”“费力”或“等臂”)杠杆,原因是___________。
21.如图所示为一拉杆旅行箱的示意图。将其视为杠杆,O为支点,B为重心,BC为竖直方向,A为拉杆端点,已知箱重为250N,OA长为120cm,OC长为24cm。
(1)图中在A点沿图示方向施加动力F,箱子静止,则动力F的力臂为______cm,F的大小为______N;
(2)使拉杆箱在图示位置静止的最小动力为______N;
(3)生活中,常把箱内较重物品靠近O点摆放,这样可使拉杆箱在图示位置静止的最小动力______(选填“变大”“变小”或“不变”)。
试卷第1页,共3页
试卷第1页,共3页
参考答案:
1.D
【详解】
A.“标”“本”表示力臂,“权”“重”表示力,故A错误;
B.杠杆绕着O转动,故O为支点,故B错误;
C.“权”小于“重”时,端可能上扬,因为杠杆平衡原理可知,平衡不仅与力有关还与力臂有关,故C错误;
D.增大“重”时,重与OB的乘积变大,在权不变的情况下可以增大标,故应把“权”向端移,故D正确。
故选D。
2.D
【详解】
1、2位置施力的力臂如图所示:
当施加的动力垂直于杠杆时,动力臂最长,因为杠杆始终在水平位置保持平衡,阻力和阻力臂一定,所以此时的动力最小;而在1、2位置施力时,动力臂较小,由杠杆平衡条件可知,此时动力较大;所以,从位置1移动到2的过程中,动力F先减小再增大,故ABC不符合题意,D符合题意。
故选D。
3.B
【详解】
A.起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;
B.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故B符合题意;
C.定滑轮实质是动力臂等于阻力臂的杠杆,是等臂杠杆,故C不符合题意;
D.天平的动力臂等于阻力臂,是等臂杠杆,故D不符合题意。
故选B。
4.B
【详解】
A.园艺剪在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;
B.筷子使用过程中,动力臂小于阻力臂,是费力杠杆,故B符合题意;
C.瓶盖起子使用过程中,动力臂大于阻力臂,是省力杠杆,故C不符合题意;
D.核桃夹使用过程中,动力臂大于阻力臂,是省力杠杆,故D不符合题意。
故选B。
5.A
【详解】
A.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故A符合题意;
B.瓶起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故B不符合题意;
C.天平在使用过程中,动力臂等于阻力臂,是等臂杠杆,故C不符合题意;
D.钳子在使用过程中,动力臂大于阻力臂,是省力杠杆,故D不符合题意。
故选A。
6.A
【详解】
根据题意知道,刻度尺的重心在25cm处,刻度尺刚好翻转时与桌沿的接触点为支点,则刻度尺重力的力臂为
L1 =25cm-23cm=2cm
虫子重力的力臂为
L2 =23cm-3cm=20cm
由杠杆平衡条件F1×L1 =F2×L2 及重力公式G=mg知道
G尺×L1 =G虫×L2
即
10g×2cm=m虫×20cm
解得m虫=1g,故A正确。
故选A。
7.D
【详解】
AB.因无法确定动力臂的大小,所以无法确定它是哪种杠杆,故AB不符合题意;
CD.加在B点的动力F与OB垂直向上时,动力作用线和杠杆垂直,支点与动力作用点之间的连线OB就是最长的动力臂,此时动力最小。因为C点是中点,所以
OB>OA=2OC
如图所示:
根据杠杆的平衡条件
F×OB=G×OC
此时的最小动力
故C不符合题意,D符合题意。
故选D。
8.D
【详解】
A.独轮车支点在车轮的轴上,动力是F,所以动力臂为1m,故A错误;
B.独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆,故B错误;
C.独轮车支点在车轮的轴上,阻力是G,所以动力臂为0.3m,故C错误;
D.由杠杆平衡条件可知,人手向上的力
故D正确。
故选D。
9.C
【详解】
A.杠杆可以是直的,也可以是弯曲的,故A错误;
B.动力臂就是支点到动力作用线的距离,故B错误;
C.杠杆的五要素之一就是支点,且支点一定作用在杠杆上,故C正确;
D.力臂不一定是杠杆的长度,也不一定在杠杆上,所以杠杆的长度不一定等于动力臂与阻力臂之和,故D错误。
故选C。
10.B
【详解】
A.太空中虽然失重,但弹簧的弹力依然存在,所以用弹簧测力计测拉力是能完成的,故A不合题意;
B.天平是等臂杠杆,根据杠杆的平衡条件可测量出物体的质量。而在失重状态下,物体不能产生对托盘的压力,故不能用托盘天平测物体的质量,故B符合题意;
C.太空中物体处于失重状态,因此,可以让笔记本悬浮在空中,故C不合题意;
D.太空中虽然失重,但弹力依然存在,所以用握力棒锻炼臂力是可行的,故D不合题意。
故选B。
11.C
【详解】
车轮与台阶的接触点即为支点,根据可知,车轮的重力即为阻力,重力的作用点在车轮的圆心处,故是一个定值,动力臂越大,则动力越小,由于推力的作用点相同,故连接推力的作用点和支点,将其作为动力臂,是最长的动力臂,做该连线的垂线,即力的作用线,如下图所示:
故C符合题意。
故选C。
12.A
【详解】
分析:(1)根据杠杆平衡原理,确定出使杠杆平衡的动力方向,然后利用几何关系求出力臂,再利用平衡条件求出最小拉力的大小.
(2)根据做功的条件分析;
(3)根据二力平衡分析;
(4)根据平衡力的条件分析.
解答:A、作用在B点的力,要使油桶C点稍离地面,必须以C点为支点,则BC作为动力臂最长,此时动力也最小,最省力,此时动力为F,阻力为G=2000N,动力臂,阻力臂
,由于,则最小拉力
,故A正确.
B、他用水平力没推动油桶,没在力的方向上通过距离,故不做功,故B错误;
C、他用水平力没推动油桶,油桶处于静止状态,推力等于摩擦力,故C错误;
D、地面对油桶的支持力和油桶对地面的压力没有作用在同一个物体上,不是平衡力,故D错误.
故选A.
【点睛】根据杠杆的平衡条件可知,在杠杆中的阻力、阻力臂一定的情况下,要使所使用的动力最小,必须使动力臂最长;而在通常情况下,连接杠杆中支点和动力作用点这两点所得到的线段是最长的.
13. 消除杠杆自重对杠杆平衡的影响,便于测量力臂 便于测量力臂
【详解】
[1]实验前,杠杆在水平位置平衡,使杠杆的重心通过支点,杠杆重力的力臂为零,其目的是消除杠杆自重对杠杆平衡的影响,便于测量力臂。
[2]实验中使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小。
14. C 省力
【详解】
[1]根据图示风向可知,当指示牌被风吹倒时,指示牌绕着C点转动,则支点为C点。如图所示:
[2]把风力看成动力,那阻力是指示牌重力,动力臂为l,阻力臂为CE,因为动力臂大于阻力臂,为省力杠杆。
15. 不是 先变小后变大 不变
【详解】
[1]阻力和阻力臂不变,动力臂越大,动力越小,连接OA,此时OA是最长动力臂,动力与OA垂直时,动力最小,如图所示:
此时AB部分水平,此时F不是最小力。
[2][3]已知阻力(物重)不变,阻力臂不变;由杠杆的平衡条件
F动l动=F阻l阻
知在F阻l阻不变的情况下,F与对应力臂的乘积不变,动力臂越长越省力;因此以OA为动力臂时,动力F最小;由图可知:当绳从图示位置沿顺时针方向旋转时,力F先变小后变大。
16. C
【详解】
[1]如图所示,在拉力的作用下吊桥绕着点C转动,所以它的支点在C点。
[2]动力作用在A点,方向沿绳子斜向上,过支点C做动力F作用线的垂线段,即为动力臂l1,如下图所示:
17.(1) ;(2)费力杠杆;(3)3.75N
(1)脚垂直作用在杠杆上,画出压力大小。
(2)从动力臂和阻力臂关系判断是省力杠杆还是费力杠杆。
(3)作出动力臂和阻力臂,根据杠杆平衡条件求出水平阻力大小。
【详解】
(1)小明脚对木杆的压力F1垂直作用的木杆上,如图所示:
。
(2)木杆是一个杠杆,O为支点,小明的脚施加的力是动力F1,动力臂为OC,按钮对木杆的压力为阻力F2,阻力臂为OD,动力臂OC小于阻力臂OD,所以木杆是费力杠杆。
(3)根据杠杆平衡条件得
F1×OC=F2×OD
按钮对木杆的压力水平向左,所以OD=AB,所以
20N×15×10-2m=F2×80×10-2m
解得:F2=3.75N。
答:(1)F1的示意图如图所示:
。
(2)该杠杆属于费力杠杆。
(3)此时按钮对杠杆施加的水平阻力F2是3.75N。
【点睛】
本题要作出动力臂和阻力臂,并且明确阻力臂和按钮的高度相同,这是解决本题的关键。
18. 省力 不变 200N 24W
【详解】
解:(1)[1][2]踮脚时,脚尖是支点,拉力是动力,脚承担的重力是阻力,此时动力臂大于阻力臂,因此可将脚看作一个省力杠杆;重力作用点的位置不变,且小腿肌肉对每只脚的拉力的方向始终竖直向上,在脚跟离开地面的过程中,重力的方向不变,但力臂在减小,同样拉力方向不变,但力臂在减小,但阻力臂和动力臂的比值始终不变,因此小腿肌肉对每只脚的拉力的大小不变。
(2)[3]小明对水平地面的压力
F压=G总=600N
受力面积
则小明对水平地面的压强
p===1.5×105Pa
(3)[4]图乙中,动力的力臂
阻力的力臂
每只脚承担人体重力的一半,因此
G1=G总=×600N=300N
根据杠杆的平衡条件,则小腿肌肉对单只脚的拉力
(4)[5]双脚踮起一次小腿肌肉对脚的拉力做的功
小明踮脚过程中克服重力做的功等于小腿肌肉对脚的拉力做的功
小明在1 min内完成40个双脚同时踮起动作克服重力所做的功
则小明踮脚过程中克服重力做功的功率
答:(1)可将脚看作一个省力杠杆,拉力的大小不变;
(2)小明对水平地面的压强为1.5×105Pa;
(3)小腿肌肉对每只脚的拉力为200N;
(4)小明在踮脚过程中克服重力做功的功率为24W。
19. 60 3 2∶5 偏小 测力计受重力,使得测力计示数小于物体A所受重力
【详解】
(1)[1]如图所示
根据杠杆的平衡条件得到F1OF=GBOB
30N×1m=50N×OB
OB=0.6m=60cm
(2)[2]由于滑轮为定滑轮,则
GA=F1=30N
当A浸没,测力计示数变为20N时。根据称重法可得
F浮=GA-F=30N-20N=10N
物体A的体积
V=V排==1×10-3m3
物体A的密度
=3×103kg/m3=3g/cm3
(3)[3]弹簧测力计的示数逐渐减为10N,根据杠杆的平衡条件得到
F2OC=GBOB′
10N×1m=50N×OB′
OB′=0.2m
所以,物体B的悬挂点移动的距离与杆长之比为
(0.6m-0.2m)∶1m=2∶5
(5)[4][5]若考虑弹簧测力计的重力,使得测力计示数小于物体A所受重力,A的重力就会偏小,测得A的质量就偏小;物体A的浮力与浸没的液体和排开的体积有关,没有影响浮力的计算,所以A测出的密度偏小。
20. 费力 见解析
【详解】
(1)[1]已知图中支点为O点,从支点作动力和阻力的作用线的垂线段,该垂线段分别为动力臂l1和阻力臂l2,如图所示:
(2)[2][3]由图可知,起重机在使用时,动力臂要小于阻力臂,动力大于阻力,为费力杠杆。
21. 60 100 50 变小
【详解】
(1)[1]在A点沿图示方向施加动力F,动力F的力臂是OA的一半,为60cm。
[2]由杠杆平衡条件可得F的大小为
(2)[3]使拉杆箱在图示位置静止的最长力臂是OA,最小动力为
(3)[4]把箱内较重物品靠近O点摆放,可减小阻力臂,由杠杆平衡条件可知,使拉杆箱在图示位置静止的最小动力变小。
答案第1页,共2页
答案第1页,共2页