北师大版九年级年级全一册14.5磁场对通电导线的作用力 同步练习(有解析)
文档属性
| 名称 | 北师大版九年级年级全一册14.5磁场对通电导线的作用力 同步练习(有解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 1.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-04-19 00:00:00 | ||
图片预览

文档简介
北师大版九年级年级全一册 14.5 磁场对通电导线的作用力
一、单选题
1.以下物理规律是由丹麦物理学家奥斯特首先发现的是( )
A.运动物体不受力可以保持匀速直线运动状态
B.浸在液体中物体受到的浮力等于它排开液体受到的重力
C.通电导体周围存在着磁场
D.通电导体在磁场中会受到力的作用
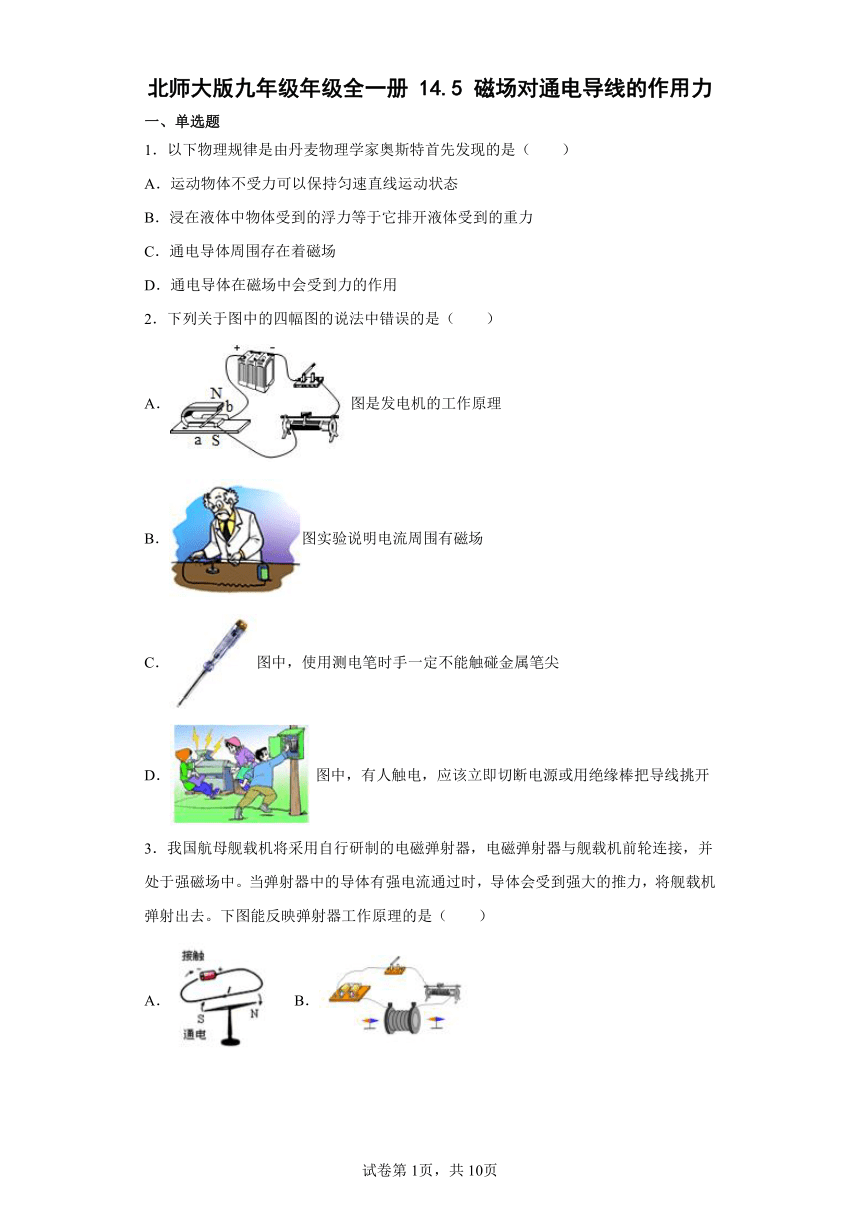
2.下列关于图中的四幅图的说法中错误的是( )
A.图是发电机的工作原理
B.图实验说明电流周围有磁场
C.图中,使用测电笔时手一定不能触碰金属笔尖
D.图中,有人触电,应该立即切断电源或用绝缘棒把导线挑开
3.我国航母舰载机将采用自行研制的电磁弹射器,电磁弹射器与舰载机前轮连接,并处于强磁场中。当弹射器中的导体有强电流通过时,导体会受到强大的推力,将舰载机弹射出去。下图能反映弹射器工作原理的是( )
A. B. C. D.
4.生活中有很多利用物理学原理制成的设备,下列说法中正确的是( )
A.扬声器是利用电磁感应原理制成的
B.电熨斗是利用电流的热效应原理制成的
C.电动机是利用电流的磁效应工作的
D.柴油机和汽油机的差别只是使用的燃油种类不同
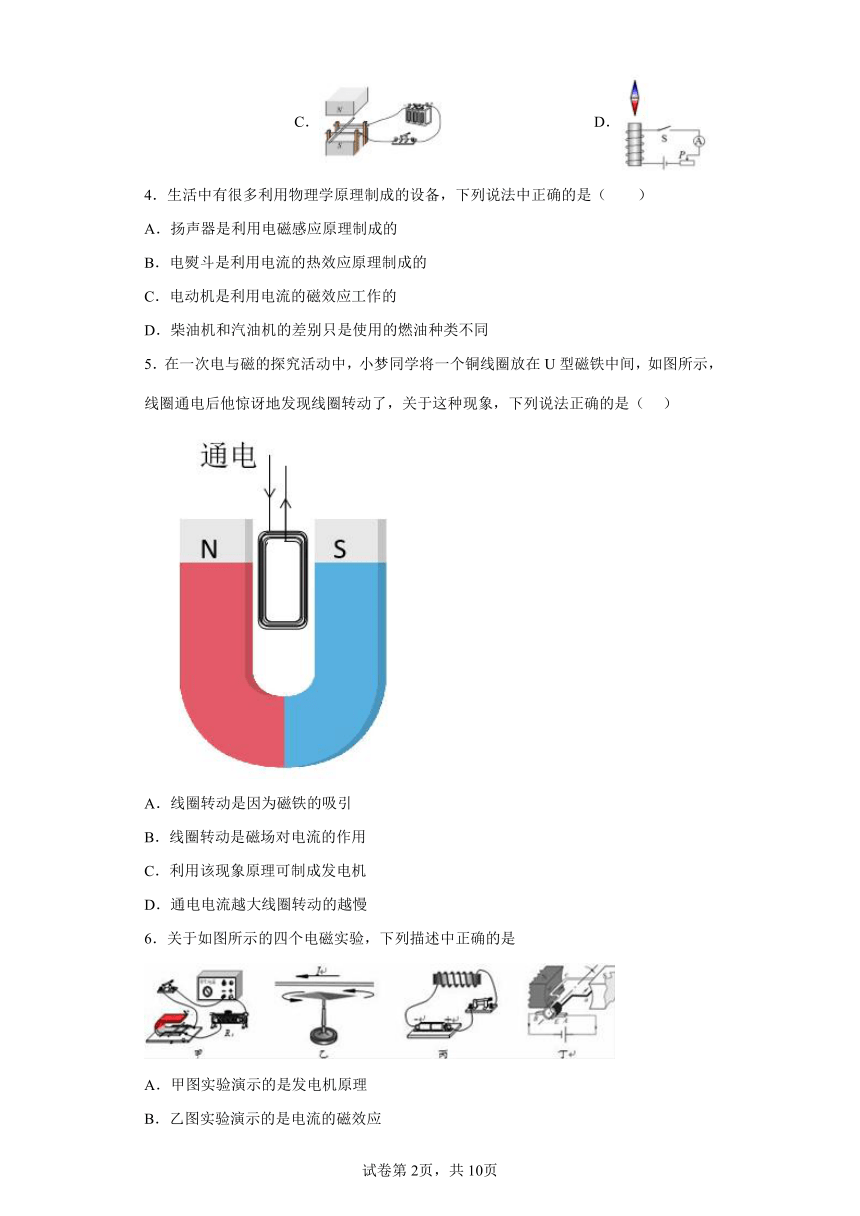
5.在一次电与磁的探究活动中,小梦同学将一个铜线圈放在U型磁铁中间,如图所示,线圈通电后他惊讶地发现线圈转动了,关于这种现象,下列说法正确的是( )
A.线圈转动是因为磁铁的吸引
B.线圈转动是磁场对电流的作用
C.利用该现象原理可制成发电机
D.通电电流越大线圈转动的越慢
6.关于如图所示的四个电磁实验,下列描述中正确的是
A.甲图实验演示的是发电机原理
B.乙图实验演示的是电流的磁效应
C.丙图实验可探究螺线管的磁场周围的磁感线分布情况
D.丁图实验演示的是电磁感应现象,发电机是依据此原理制成的
7.如图所示的实验装置可以用来研究( )
A.影响通电导线受到的磁场力大小的因素
B.影响通电导线受到的磁场力方向的因素
C.导线在磁场中怎样运动才能产生感应电流
D.影响通电导线周围产生的磁场强弱的因素
8.下列说法中正确的是( )
A.磁感线是磁场中真实存在的曲线,其上某一点的切线方向与该点的磁场方向相同
B.通电导体在磁场中的受力方向与电流方向和磁场方向都有关系
C.地球是一个巨大的天然磁体,地磁北极在地理北极附近
D.发现电流周围存在磁场的物理学家是安培
9.如图甲所示,磁铁上下摆放形成稳定磁场,取闭合回路的一部分直导体ab沿东西方向放置于两磁铁中间,当闭合开关,该磁场对导体ab产生向北的作用力。图乙为通电螺线管外部磁场的分布情况。则下列哪种方式可以使得通电螺线管的磁场对导体ab的作用力方向与甲图中ab的受力方向相同( )
A. B.
C. D.
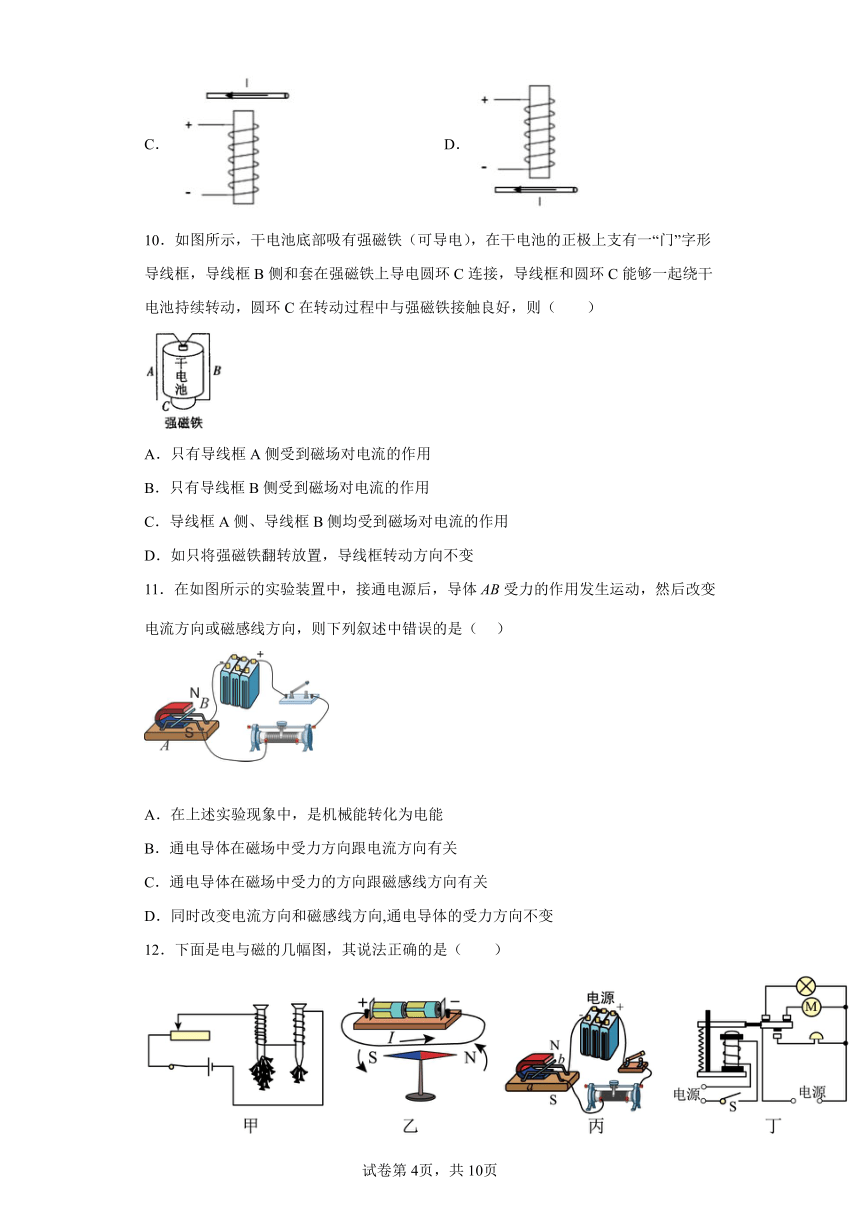
10.如图所示,干电池底部吸有强磁铁(可导电),在干电池的正极上支有一“门”字形导线框,导线框B侧和套在强磁铁上导电圆环C连接,导线框和圆环C能够一起绕干电池持续转动,圆环C在转动过程中与强磁铁接触良好,则( )
A.只有导线框A侧受到磁场对电流的作用
B.只有导线框B侧受到磁场对电流的作用
C.导线框A侧、导线框B侧均受到磁场对电流的作用
D.如只将强磁铁翻转放置,导线框转动方向不变
11.在如图所示的实验装置中,接通电源后,导体AB受力的作用发生运动,然后改变电流方向或磁感线方向,则下列叙述中错误的是( )
A.在上述实验现象中,是机械能转化为电能
B.通电导体在磁场中受力方向跟电流方向有关
C.通电导体在磁场中受力的方向跟磁感线方向有关
D.同时改变电流方向和磁感线方向,通电导体的受力方向不变
12.下面是电与磁的几幅图,其说法正确的是( )
A.图甲,当电流一定时,线圈匝数少的电磁铁,磁性弱
B.图乙说明通电导体周围存在着磁场,将小磁针移走,该磁场消失
C.图丙装置研究的是导体在磁场中能产生感应电流
D.图丁,当开关S闭合时,灯亮,电动机转起来,电铃不响
二、填空题
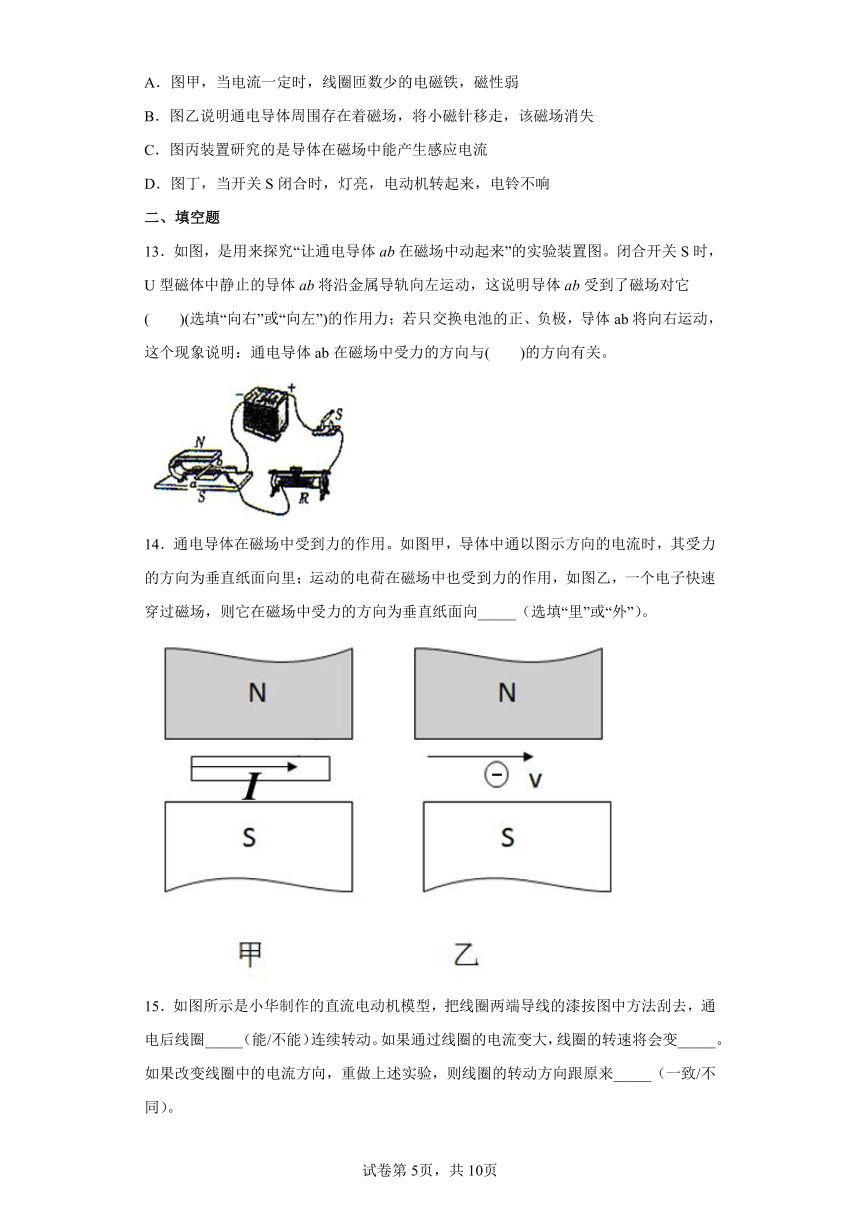
13.如图,是用来探究“让通电导体ab在磁场中动起来”的实验装置图。闭合开关S时,U型磁体中静止的导体ab将沿金属导轨向左运动,这说明导体ab受到了磁场对它( )(选填“向右”或“向左”)的作用力;若只交换电池的正、负极,导体ab将向右运动,这个现象说明:通电导体ab在磁场中受力的方向与( )的方向有关。
14.通电导体在磁场中受到力的作用。如图甲,导体中通以图示方向的电流时,其受力的方向为垂直纸面向里;运动的电荷在磁场中也受到力的作用,如图乙,一个电子快速穿过磁场,则它在磁场中受力的方向为垂直纸面向_____(选填“里”或“外”)。
15.如图所示是小华制作的直流电动机模型,把线圈两端导线的漆按图中方法刮去,通电后线圈_____(能/不能)连续转动。如果通过线圈的电流变大,线圈的转速将会变_____。如果改变线圈中的电流方向,重做上述实验,则线圈的转动方向跟原来_____(一致/不同)。
16.如图所示,AB和CD是两根固定且平行的光滑金属轨道,符号“×”代表垂直金属导轨向下的磁场,现将铜棒EF和GH垂直静止放在导轨上,当拉动铜棒EF向左运动时,铜棒GH会跟着向左运动。若将磁场方向改为与原来相反,仍然向左拉动铜棒EF,则GH的运动方向_______(选填“向左”或“向右”),理由是___________。
三、综合题
17.节能减排,绿色环保,新能源汽车成为未来汽车发展的方向。某款电动汽车(如图)以72 km/h的速度在平直公路上匀速行驶了300 km,耗电60,请解答下列问题:
(1)电动机的工作原理是_________( 选填“电流的磁效应”或“磁场对电流的作用”);
(2)上述行驶过程中,牵引力做的功为1.8× 108 J,则电动汽车电能转化为机械能的效率是多大 ( )
(3)有款与它外形 、重量 均相同的汽油车,在相同路面上以相同的速度行驶 300 km,其效率为25% ,需要消耗多少千克汽油 ( )(q汽油=4.5×107J/kg)
(4)从节能环保的角度,纯电动汽车与传统燃油汽车相比,有什么优点 ( )(写出一条即可)
18.如图甲所示为我国时制的某款智能防疫机器人,它具有自主测温、移动、避障等功能。机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系统会自动语音报警。机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,如图乙所示为控制电机运转的部分电路,U为输入电压,R1为定值电阻,RB为磁敏电阻,其阻值随外加磁场强弱的变化而变化。
(1)机器人为有效避障,在移动过程中会发射、接收超声波(或激光)来侦测障碍物信息。当机器人在行进过程中遇到玻璃等透明障碍物时,它是利用______(选填“超声波”或“激光”)才能更好的感知到障碍物;以移动的机器人为参照物,障碍物是______的(选填“运动”或“静止”)。
(2)下列关于机器人的说法中,正确的是( )
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的红外线,但不属于电磁波家族
C.图乙中电磁铁的上端为S极
D.机器人发现体温38℃的人会语音报警并识别
(3)机器人是利用电动机来驱动的,驱动电机的输入总功率为400W,将电能转化为机械能的效率为60%,它的移动速度范围为0.1~1.0m/s。若机器人以最大速度沿水平路面匀速直线运动,则此过程中机器人受到的阻力为______N。
(4)控制驱动电机运转的磁敏电阻阻值随磁场强弱变化的图像如图丙所示,当它在正常工作区时,即使图乙电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动。则磁敏电阻的正常工作区对应图中______(选填“ab”或“bc”)段;驱动电机的工作原理与______相同(选填“扬声器”或“麦克风”)。
19.如图(1)为最新型的智能穿戴设备谷歌眼镜(Google Project Glass),它的外观类似一个环绕式眼镜,其中一个镜片具有微型显示屏的功能。眼镜可将信息传送至镜片,并且允许穿戴用户通过声音控制,Google眼镜包含了很多高科技,包括蓝牙,Wi﹣Fi,骨传导耳机,照相机,麦克风,触摸盘以及帮助你探测倾斜度的重力感应和陀螺仪
(1)下列关于谷歌眼镜说法正确的是______
A.谷歌眼镜的耳机系统采用骨传导是因为固体能够传声 B.wifi无线信号是通过电磁波来传递信息的
C.谷歌眼镜是通过音调来辨别声音是否由使用者发出 D.麦克风是将电信号转化成声信号的装置
(2)谷歌眼镜内置一块3.6V 容量为600mAh的电池,高负荷使用仅可以坚持6个小时.并且在使用中因为电流的________效应会有明显的发热,给使用者带来不适.试计算谷歌眼镜在高负荷使用中的平均功率为________W;
(3)重力感应装置可以侦测到眼镜佩戴者头部的倾斜程度,如图(4)为一种重力感应装置的部分结构,其中A为高2mm重0.1g的柱形金属重物,固定在长1cm的轻质金属杆中央,杆的两头杆粘连在BC两个压电感应器上。当装置水平放置,若以B为支点,压点感应器C所受压力为________N。若压电感应器上产生的电压与压力成正比,试计算该装置左端向下倾斜45°度(如图(5))时,bc两个压电感应器产生的电压UB________UC 。
20.如图,线圈abcd位于磁场中.
(1)通电后,cd段导线的电流方向是________(填“由c到d”或“由d到c”).
(2)cd段导线受磁场力的方向如图所示,在图中画出ab段导线受磁场力的方向.
( )
21.1901年,挪威人伯克兰造出世界上第一台电磁发射器,首开电磁炮先河.为了认识电磁炮的一些特性,小柯制作了一个电磁炮模型,其原理如下图.螺线管通电后,铁制撞针迅速前移,推动炮弹射出炮管.
(1)小柯要增强电磁炮中螺线管磁场,下列方法可行的是 (选填字母).
A.增加螺线管的线圈匝数
B.改变线圈中的电流方向
C.增大通过螺线管的电流
(2)炮弹的动能影响它的威力.直接测量动能小柯遇到困难,所以,他通过测量同一炮弹的射程(炮弹出射点离落地点间的水平距离)来间接比较.此研究方法与下列 (选填字母)实验所用方法相同.
A.用刻度尺测物体长度 B.用量筒测液体体积 C.用压强计研究液体内部压强
(3)小柯测得的一项实验数据(取多次实验的平均值)如下表.
实验次数 第1次 第2次 第3次 第4次 第5次
撞针质量(克) 0.1 0.2 0.3 0.4 0.5
射 程(米) 0.48 0.54 0.81 0.46 0.41
小柯得出了“当其他条件相同的情况下,撞针质量为0.3克时电磁炮的射程最远”的结论.
小妍觉得这个结论还不可靠,建议再取不同质量的撞针进行实验.你认为选择撞针质量范围在 克之间进行进一步实验比较合理.
试卷第1页,共3页
试卷第1页,共3页
参考答案:
1.C
【详解】
A.运动物体不受力可以保持匀速直线运动状态,这是牛顿第一定律的内容,是牛顿总结出来的,故A不符合题意;
B.浸在液体中物体受到的浮力等于它排开液体受到的重力,这是阿基米德原理,是阿基米德原理得出的,故B不符合题意;
C.丹麦物理学家奥斯特在1820年发现了电流的磁效应,即电流的周围存在磁场,是历史上最早发现电流磁效应的人,故C符合题意;
D.通电导体在磁场中会受到力的作用是电动机的原理,故D不符合题意。
故选C。
2.A
【详解】
A.图中有电源,验证通电导体在磁场中受力的实验,利用此装置原理制造了电动机而不是发电机,故A错误,符合题意;
B.图中验证了通电导体周围存在磁场,这是奥斯特的实验,说明了电流的磁效应,故B正确,不符合题意;
C.用测电笔辨别火线、零线时,手指一定要接触测电笔上端的金属帽,不能触碰金属笔尖,故C正确,不符合题意;
D.发现有人触电时,应赶快切断电源或用干燥木棍将电线挑开,不能用手直接拉,防止也触电,故D正确,不符合题意。
故选A。
3.C
【详解】
A.图中是奥斯特实验,证明了电流周围存在磁场,故A不符合题意;
B.图中的实验,证明了通过线圈周围存在磁场,故B不符合题意;
C.图中开关闭合时,通过导体在磁场中要受到力的作用而运动,与电磁弹射原理相同,故C符合题意;
D.图中开关闭合,电磁铁产生磁性,由于磁极间的相互作用,小磁针发生偏转,故D不符合题意。
故选C。
4.B
【详解】
A.扬声器的原理与电动机相同,是利用磁场对电流的作用工作的,故A错误;
B.电熨斗是利用导体中通过电流时产生热量的原理制成的,故B正确;
C.电动机是利用通电线圈在磁场中受力从而产生转动的原理工作的,故C错误;
D.柴油机和汽油机的差别是使用的燃油种类不同、构造略有不同 、吸入的气体也不同,故D错误。
故选B。
5.B
【详解】
A.铜线圈不导磁,不会被磁铁吸引,故A错误;
B.有电流通过的铜线圈置于磁场中晃动,体现了通电导体在磁场中受到力的作用,故B正确;
C.利用该现象原理可制成电动机,故C错误;
D.通电电流越大,受到的安培力越大,则线圈转动的越快,故D错误。
故选B。
6.B
【详解】
A.甲图的实验研究的是通电导体在磁场中受力而运动,电动机是依据此原理制成的,故A错误;
B.乙实验演示的是电流的磁效应,即奥斯特实验,说明通电导线周围存在着磁场,故B正确;
C.丙图实验可探究螺线管的磁场方向与电流方向的关系等,但不能直接探究其周围的磁感线分布情况,故C错误;
D.丁图中有电源,是电动机的原理,即通电导体在磁场中受到力的作用,故D错误;
故选B。
7.B
【详解】
该实验装置是研究通电导体在磁场中受力而运动,而电流的方向可以改变,所以能探究影响通电导线受到的磁场力方向的因素,故选ACD不符合题意,B符合题意。
故选B 。
8.B
【详解】
A.磁体周围存在着磁场,磁感线是为了形象的来描述磁感线而引入的一种物理模型,不是真实存在的,故A错误;
B.通电导体在磁场中要受到力的作用,其受力方向与电流方向和磁场方向有关,当改变其中一个方向时,导体受力作用方向将改变,若两个方向都改变时,导体的受力方向将不改变,故B正确;
C.在磁体外部,磁感线是从N极发出,回到S极;小磁针静止时,N极指示地理的北极,故据此即可判定地理位置的南北极与地磁的南北极是相反的,故C错误;
D.世界上第一个发现电流周围存在磁场,即电流的磁效应的物理学家是奥斯特,故D错误。
故选B。
9.A
【详解】
由所给电源正负极可知,题干图中电流方向向东,磁场方向是竖直向下的,已知此时导体ab受到磁场力的方向向北;
A.由右手螺旋定则知A图中螺线管上端为N极,下端为S极,通电导体所在位置磁场方向是竖直向上,导体中电流方向向西,根据甲图导体运动方向与磁场方向和电流方向的关系知,导体受到磁场力的方向向北,与甲图中ab的受力方向相同,故A符合题意;
B.由右手螺旋定则知B图中螺线管上端为N极,下端为S极,通电导体所在位置磁场方向是竖直向上,导体中电流方向向东,根据甲图导体运动方向与磁场方向和电流方向的关系知导体受到磁场力的方向向南,与甲图中ab的受力方向相反,故B不符合题意;
CD.由右手螺旋定则知CD 图中螺线管上端为S极,下端为N极,通电导体所在位置磁场方向是竖直向下,导体中电流方向向西,根据甲图导体运动方向与磁场方向和电流方向的关系知导体受到磁场力的方向向南,与甲图中ab的受力方向相反,故CD不符合题意。
故选A。
10.B
【详解】
干电池底部吸有强磁铁,周围存在磁场,导线框B侧和套在强磁铁上导电圆环C连接,则线框B侧有电流通过(即线框B侧是通电导体),所以线框B侧受到磁场对电流的作用力而运动;而线框A侧没有通电,所以A侧没有受到磁场的作用力;故B正确,ACD错误。
故选B。
11.A
【详解】
A.在上述实验现象中,通电导体在磁场中运动,是电能转化为机械能,故A错误,符合题意;
BC.只改变电流方向或者只改变磁感线方向,通电导体在磁场中运动的方向都会发生改变,说明通电导体在磁场中受力方向跟电流方向和磁感线方向有关,故BC正确,不符合题意;
D.电流方向和磁感线方向两个影响因素同时改变时,受力运动方向不变,故D正确,不符合题意
故选A
12.A
【详解】
A.由甲图可知,线圈匝数越多,吸引大头针数目越多,说明电磁铁磁性越强,即在电流一定时,匝数越少磁性越弱,故A正确;
B.奥斯特实验说明通电导线周围存在磁场,该磁场是通电导线产生的,与有无小磁针无关,故B错误;
C.图丙装置研究的是通电导线在磁场中受力运动,故C错误;
D.图丁中,当开关S闭合时,电磁铁获得磁性吸引衔铁向下运动,此时电铃响,灯和电动机不工作,故D错误。
故选A。
13. 向左 电流
【详解】
[1] 导体ab原来静止,受到磁场力后向左运动,说明磁场力的方向向左;
[2] 电流方向改变,受到的磁场力方向改变,说明通电导体ab在磁场中受力的方向与电流的方向有关。
14.外
【详解】
通电导体在磁场中受到力的作用,力的方向跟导体中的电流方向和磁场方向有关,当电流方向或磁场方向与原来相反时,力的方向也与原来相反;当电流方向和磁场方向同时改变时,力的方向不变。图乙可知,电子向右运动,所以电流的方向就是向左的,乙图中电流方向与甲图中电流方向相反,磁场方向不变,所以电子的受力情况与甲图中导体受力方向相反,垂直纸面向外。
15. 能 大 不同
【详解】
[1]如图所示,将线圈两端引线的漆皮一端全部刮掉,另一端只刮半周,这样当线圈转至平衡位置时,由于惯性继续转动,而不是受相反方向的力,当回到初始位置时,再次受力转动,从而使线圈继续转动下去。故图中线圈可以连续转动。
[2]如果通过线圈的电流变大,线圈受力变大,线圈的转动速度将变大。
[3]如果改变线圈中的电流方向,线圈受力方向改变,线圈的转动方向将改变。
16. 向左 同时改变电流方向和磁场方向,导体受力方向不变
【详解】
当只改变磁场方向或电流方向时,导体受力方向改变;当同时改变磁场方向和电流方向时,导体受力方向不变。
[1][2]若将磁场方向改为与原来相反,仍然向左拉动铜棒EF,则产生的感应电流方向和原来相反。铜棒GH所处的磁场方向改变,GH内的电流方向也改变,则GH的受力方向不变,运动方向还是向左。
17. 磁场对电流的作用 83.3% 16 kg 见解析
【详解】
(1)[1]电动机是根据磁场对通电导体有力的作用的原理工作的,实质是磁场对电流的作用。
(2)[2]行驶了300 km耗电60kW·h,即消耗的电能为
电动汽车的效率
(3)[3]汽油车和电动汽车重力相同,在相同的路面上以相同的速度与速行驶,受到的阻力相同;而受到的牵引力和阻力是一对平衡力,大小相等;故行驶相同的路程,牵引力做的有用功相等。
汽油完全燃烧完放的热量
需要消耗汽油的质量
(4)[4]纯电动汽车与传统燃油汽车相比噪声小;大气污染小;节约化石能源能量;利用效率高等。
18. 超声波 运动 D 240 bc 扬声器
【详解】
(1)[1]激光可以在透明介质中传播,而超声波是以波的形式传播,遇到障碍物时会反射从而被机器人接收,所以,机器人在行进过程中遇到玻璃等透明障碍物时,利用超声波才能较好感知到障碍物。
[2]机器人与障碍物之间的位置不断变化,以机器人为参照物,障碍物是运动的。
(2)[3]A.菲涅尔透镜能会聚红外线,是凸透镜,故A错误;
B.红外线属于电磁波,故B错误;
C.电流由下端流入电磁铁,由安培定则可知,电磁铁上端为N极,故C错误;
D.人体正常体温约37℃,体温38℃属于超温状态,机器人会报警,故D正确。
故选D。
(3)[4]机械功率为
P1=400W×60%=240W
机器人所受牵引力
因做匀速直线运动,由二力平衡,机器人受到的阻力为240N。
(4)[5]因为R1与RB串联,由串联分压原理可知,为维持U1两端电压稳定,磁敏电阻RB两端电压UB也应该随输入电压U的变化而发生变化,则RB阻值的变化量较大,由图可知应选择bc段。
[6]驱动电机原理是通电导体在磁场中受到力的作用,与扬声器相同,麦克风原理是电磁感应,故选扬声器。
19. AB 热 0.36 5×10﹣4 >
【详解】
(1)[1]A.固体可以传声,因此谷歌眼镜的耳机系统采用骨传导是因为固体能够传声,故A正确;
B.wifi无线信号是通过电磁波来传递信息的,故B正确;
C.因为不同声音的音色不同,因此谷歌眼镜是通过音色来辨别声音是否由使用者发出,故C错误;
D.麦克风是将声信号转化成电信号的装置,扬声器是将电信号转化成声信号的装置,故D错误。
故选AB。
(2)[2]谷歌眼镜在使用中,由于电流的热效应会有明显的发热现象。
[3]已知Q=600mAh=0.6Ah,则谷歌眼镜在高负荷使用中平均功率:
P=
(3)[4][5]由F1L1=F2L2可得,
FC×BC=GA×BC
即压点感应器C所受压力:
F压力=FC=mAg=
×0.1×10-3kg×10N/kg=5×10-4N;
分别以B、C为支点,求出对应压力FC、FB;以B为支点,如图所示:
其中AO=1mm,BO=10mm,由几何知识可得OE=1mm,BE=5mm-1mm=4mm
所以重力的力臂为
BD=BE cos45°=4mm×mm,
根据杠杆平衡条件G×BD=FC×BC可得,
FC′=G ①
以C为支点,杠杆受重力G、B点垂直杠杆向上的支持力,如图所示:
由几何知识可得
CE=10mm-4mm=6mm
所以重力的力臂为
CF=CE cos45°=6mm×3mm;
根据杠杆平衡条件G×CF=FB×BC可得,
FB=G ②
由题意可得
故UB>UC。
20. 由c到d
【详解】
试题分析:(1)把正电荷定向移动的方向规定为电流的方向,电流从电源的正极出发经过开关从a到b到c到d回到负极;
(2)通电导体在磁场中受到力的方向与电流的方向和磁场的方向有关,磁场的方向不变,电流通过ab段和cd段时的方向刚好相反,所以受到磁场力的方向也刚好相反,如图所示,
考点:电流磁场的方向与电流的方向、磁场的方向有关
21.(1)A C (2)C (3)0.2—0.4
【详解】
试题分析:(1)通电螺线管磁场的强弱与电流的大小、线圈的多少和铁芯的有无有关.
(2)把测量动能的大小,转化成测量同一炮弹的射程,这是利用了转换思想,把不易测量的物理量转换成易测量的物理量.这与利用压强计测量液体的压强方法类似,把液体内部压强的大小转化成U型管中液面的高度差不同,形象易于比较.
(3)根据表格中信息知道撞针在0.2—0.4之间时,电磁炮的射程最远.
【考点定位】电与磁 物理实验方法
答案第1页,共2页
答案第1页,共2页
一、单选题
1.以下物理规律是由丹麦物理学家奥斯特首先发现的是( )
A.运动物体不受力可以保持匀速直线运动状态
B.浸在液体中物体受到的浮力等于它排开液体受到的重力
C.通电导体周围存在着磁场
D.通电导体在磁场中会受到力的作用
2.下列关于图中的四幅图的说法中错误的是( )
A.图是发电机的工作原理
B.图实验说明电流周围有磁场
C.图中,使用测电笔时手一定不能触碰金属笔尖
D.图中,有人触电,应该立即切断电源或用绝缘棒把导线挑开
3.我国航母舰载机将采用自行研制的电磁弹射器,电磁弹射器与舰载机前轮连接,并处于强磁场中。当弹射器中的导体有强电流通过时,导体会受到强大的推力,将舰载机弹射出去。下图能反映弹射器工作原理的是( )
A. B. C. D.
4.生活中有很多利用物理学原理制成的设备,下列说法中正确的是( )
A.扬声器是利用电磁感应原理制成的
B.电熨斗是利用电流的热效应原理制成的
C.电动机是利用电流的磁效应工作的
D.柴油机和汽油机的差别只是使用的燃油种类不同
5.在一次电与磁的探究活动中,小梦同学将一个铜线圈放在U型磁铁中间,如图所示,线圈通电后他惊讶地发现线圈转动了,关于这种现象,下列说法正确的是( )
A.线圈转动是因为磁铁的吸引
B.线圈转动是磁场对电流的作用
C.利用该现象原理可制成发电机
D.通电电流越大线圈转动的越慢
6.关于如图所示的四个电磁实验,下列描述中正确的是
A.甲图实验演示的是发电机原理
B.乙图实验演示的是电流的磁效应
C.丙图实验可探究螺线管的磁场周围的磁感线分布情况
D.丁图实验演示的是电磁感应现象,发电机是依据此原理制成的
7.如图所示的实验装置可以用来研究( )
A.影响通电导线受到的磁场力大小的因素
B.影响通电导线受到的磁场力方向的因素
C.导线在磁场中怎样运动才能产生感应电流
D.影响通电导线周围产生的磁场强弱的因素
8.下列说法中正确的是( )
A.磁感线是磁场中真实存在的曲线,其上某一点的切线方向与该点的磁场方向相同
B.通电导体在磁场中的受力方向与电流方向和磁场方向都有关系
C.地球是一个巨大的天然磁体,地磁北极在地理北极附近
D.发现电流周围存在磁场的物理学家是安培
9.如图甲所示,磁铁上下摆放形成稳定磁场,取闭合回路的一部分直导体ab沿东西方向放置于两磁铁中间,当闭合开关,该磁场对导体ab产生向北的作用力。图乙为通电螺线管外部磁场的分布情况。则下列哪种方式可以使得通电螺线管的磁场对导体ab的作用力方向与甲图中ab的受力方向相同( )
A. B.
C. D.
10.如图所示,干电池底部吸有强磁铁(可导电),在干电池的正极上支有一“门”字形导线框,导线框B侧和套在强磁铁上导电圆环C连接,导线框和圆环C能够一起绕干电池持续转动,圆环C在转动过程中与强磁铁接触良好,则( )
A.只有导线框A侧受到磁场对电流的作用
B.只有导线框B侧受到磁场对电流的作用
C.导线框A侧、导线框B侧均受到磁场对电流的作用
D.如只将强磁铁翻转放置,导线框转动方向不变
11.在如图所示的实验装置中,接通电源后,导体AB受力的作用发生运动,然后改变电流方向或磁感线方向,则下列叙述中错误的是( )
A.在上述实验现象中,是机械能转化为电能
B.通电导体在磁场中受力方向跟电流方向有关
C.通电导体在磁场中受力的方向跟磁感线方向有关
D.同时改变电流方向和磁感线方向,通电导体的受力方向不变
12.下面是电与磁的几幅图,其说法正确的是( )
A.图甲,当电流一定时,线圈匝数少的电磁铁,磁性弱
B.图乙说明通电导体周围存在着磁场,将小磁针移走,该磁场消失
C.图丙装置研究的是导体在磁场中能产生感应电流
D.图丁,当开关S闭合时,灯亮,电动机转起来,电铃不响
二、填空题
13.如图,是用来探究“让通电导体ab在磁场中动起来”的实验装置图。闭合开关S时,U型磁体中静止的导体ab将沿金属导轨向左运动,这说明导体ab受到了磁场对它( )(选填“向右”或“向左”)的作用力;若只交换电池的正、负极,导体ab将向右运动,这个现象说明:通电导体ab在磁场中受力的方向与( )的方向有关。
14.通电导体在磁场中受到力的作用。如图甲,导体中通以图示方向的电流时,其受力的方向为垂直纸面向里;运动的电荷在磁场中也受到力的作用,如图乙,一个电子快速穿过磁场,则它在磁场中受力的方向为垂直纸面向_____(选填“里”或“外”)。
15.如图所示是小华制作的直流电动机模型,把线圈两端导线的漆按图中方法刮去,通电后线圈_____(能/不能)连续转动。如果通过线圈的电流变大,线圈的转速将会变_____。如果改变线圈中的电流方向,重做上述实验,则线圈的转动方向跟原来_____(一致/不同)。
16.如图所示,AB和CD是两根固定且平行的光滑金属轨道,符号“×”代表垂直金属导轨向下的磁场,现将铜棒EF和GH垂直静止放在导轨上,当拉动铜棒EF向左运动时,铜棒GH会跟着向左运动。若将磁场方向改为与原来相反,仍然向左拉动铜棒EF,则GH的运动方向_______(选填“向左”或“向右”),理由是___________。
三、综合题
17.节能减排,绿色环保,新能源汽车成为未来汽车发展的方向。某款电动汽车(如图)以72 km/h的速度在平直公路上匀速行驶了300 km,耗电60,请解答下列问题:
(1)电动机的工作原理是_________( 选填“电流的磁效应”或“磁场对电流的作用”);
(2)上述行驶过程中,牵引力做的功为1.8× 108 J,则电动汽车电能转化为机械能的效率是多大 ( )
(3)有款与它外形 、重量 均相同的汽油车,在相同路面上以相同的速度行驶 300 km,其效率为25% ,需要消耗多少千克汽油 ( )(q汽油=4.5×107J/kg)
(4)从节能环保的角度,纯电动汽车与传统燃油汽车相比,有什么优点 ( )(写出一条即可)
18.如图甲所示为我国时制的某款智能防疫机器人,它具有自主测温、移动、避障等功能。机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上通过处理系统转变为热图像,实现对人群的体温检测。当发现超温人员,系统会自动语音报警。机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,如图乙所示为控制电机运转的部分电路,U为输入电压,R1为定值电阻,RB为磁敏电阻,其阻值随外加磁场强弱的变化而变化。
(1)机器人为有效避障,在移动过程中会发射、接收超声波(或激光)来侦测障碍物信息。当机器人在行进过程中遇到玻璃等透明障碍物时,它是利用______(选填“超声波”或“激光”)才能更好的感知到障碍物;以移动的机器人为参照物,障碍物是______的(选填“运动”或“静止”)。
(2)下列关于机器人的说法中,正确的是( )
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的红外线,但不属于电磁波家族
C.图乙中电磁铁的上端为S极
D.机器人发现体温38℃的人会语音报警并识别
(3)机器人是利用电动机来驱动的,驱动电机的输入总功率为400W,将电能转化为机械能的效率为60%,它的移动速度范围为0.1~1.0m/s。若机器人以最大速度沿水平路面匀速直线运动,则此过程中机器人受到的阻力为______N。
(4)控制驱动电机运转的磁敏电阻阻值随磁场强弱变化的图像如图丙所示,当它在正常工作区时,即使图乙电路中输入电压U发生改变,R1两端电压U1都能维持在某一定值附近微小变化,从而使控制电路中的电机稳定转动。则磁敏电阻的正常工作区对应图中______(选填“ab”或“bc”)段;驱动电机的工作原理与______相同(选填“扬声器”或“麦克风”)。
19.如图(1)为最新型的智能穿戴设备谷歌眼镜(Google Project Glass),它的外观类似一个环绕式眼镜,其中一个镜片具有微型显示屏的功能。眼镜可将信息传送至镜片,并且允许穿戴用户通过声音控制,Google眼镜包含了很多高科技,包括蓝牙,Wi﹣Fi,骨传导耳机,照相机,麦克风,触摸盘以及帮助你探测倾斜度的重力感应和陀螺仪
(1)下列关于谷歌眼镜说法正确的是______
A.谷歌眼镜的耳机系统采用骨传导是因为固体能够传声 B.wifi无线信号是通过电磁波来传递信息的
C.谷歌眼镜是通过音调来辨别声音是否由使用者发出 D.麦克风是将电信号转化成声信号的装置
(2)谷歌眼镜内置一块3.6V 容量为600mAh的电池,高负荷使用仅可以坚持6个小时.并且在使用中因为电流的________效应会有明显的发热,给使用者带来不适.试计算谷歌眼镜在高负荷使用中的平均功率为________W;
(3)重力感应装置可以侦测到眼镜佩戴者头部的倾斜程度,如图(4)为一种重力感应装置的部分结构,其中A为高2mm重0.1g的柱形金属重物,固定在长1cm的轻质金属杆中央,杆的两头杆粘连在BC两个压电感应器上。当装置水平放置,若以B为支点,压点感应器C所受压力为________N。若压电感应器上产生的电压与压力成正比,试计算该装置左端向下倾斜45°度(如图(5))时,bc两个压电感应器产生的电压UB________UC 。
20.如图,线圈abcd位于磁场中.
(1)通电后,cd段导线的电流方向是________(填“由c到d”或“由d到c”).
(2)cd段导线受磁场力的方向如图所示,在图中画出ab段导线受磁场力的方向.
( )
21.1901年,挪威人伯克兰造出世界上第一台电磁发射器,首开电磁炮先河.为了认识电磁炮的一些特性,小柯制作了一个电磁炮模型,其原理如下图.螺线管通电后,铁制撞针迅速前移,推动炮弹射出炮管.
(1)小柯要增强电磁炮中螺线管磁场,下列方法可行的是 (选填字母).
A.增加螺线管的线圈匝数
B.改变线圈中的电流方向
C.增大通过螺线管的电流
(2)炮弹的动能影响它的威力.直接测量动能小柯遇到困难,所以,他通过测量同一炮弹的射程(炮弹出射点离落地点间的水平距离)来间接比较.此研究方法与下列 (选填字母)实验所用方法相同.
A.用刻度尺测物体长度 B.用量筒测液体体积 C.用压强计研究液体内部压强
(3)小柯测得的一项实验数据(取多次实验的平均值)如下表.
实验次数 第1次 第2次 第3次 第4次 第5次
撞针质量(克) 0.1 0.2 0.3 0.4 0.5
射 程(米) 0.48 0.54 0.81 0.46 0.41
小柯得出了“当其他条件相同的情况下,撞针质量为0.3克时电磁炮的射程最远”的结论.
小妍觉得这个结论还不可靠,建议再取不同质量的撞针进行实验.你认为选择撞针质量范围在 克之间进行进一步实验比较合理.
试卷第1页,共3页
试卷第1页,共3页
参考答案:
1.C
【详解】
A.运动物体不受力可以保持匀速直线运动状态,这是牛顿第一定律的内容,是牛顿总结出来的,故A不符合题意;
B.浸在液体中物体受到的浮力等于它排开液体受到的重力,这是阿基米德原理,是阿基米德原理得出的,故B不符合题意;
C.丹麦物理学家奥斯特在1820年发现了电流的磁效应,即电流的周围存在磁场,是历史上最早发现电流磁效应的人,故C符合题意;
D.通电导体在磁场中会受到力的作用是电动机的原理,故D不符合题意。
故选C。
2.A
【详解】
A.图中有电源,验证通电导体在磁场中受力的实验,利用此装置原理制造了电动机而不是发电机,故A错误,符合题意;
B.图中验证了通电导体周围存在磁场,这是奥斯特的实验,说明了电流的磁效应,故B正确,不符合题意;
C.用测电笔辨别火线、零线时,手指一定要接触测电笔上端的金属帽,不能触碰金属笔尖,故C正确,不符合题意;
D.发现有人触电时,应赶快切断电源或用干燥木棍将电线挑开,不能用手直接拉,防止也触电,故D正确,不符合题意。
故选A。
3.C
【详解】
A.图中是奥斯特实验,证明了电流周围存在磁场,故A不符合题意;
B.图中的实验,证明了通过线圈周围存在磁场,故B不符合题意;
C.图中开关闭合时,通过导体在磁场中要受到力的作用而运动,与电磁弹射原理相同,故C符合题意;
D.图中开关闭合,电磁铁产生磁性,由于磁极间的相互作用,小磁针发生偏转,故D不符合题意。
故选C。
4.B
【详解】
A.扬声器的原理与电动机相同,是利用磁场对电流的作用工作的,故A错误;
B.电熨斗是利用导体中通过电流时产生热量的原理制成的,故B正确;
C.电动机是利用通电线圈在磁场中受力从而产生转动的原理工作的,故C错误;
D.柴油机和汽油机的差别是使用的燃油种类不同、构造略有不同 、吸入的气体也不同,故D错误。
故选B。
5.B
【详解】
A.铜线圈不导磁,不会被磁铁吸引,故A错误;
B.有电流通过的铜线圈置于磁场中晃动,体现了通电导体在磁场中受到力的作用,故B正确;
C.利用该现象原理可制成电动机,故C错误;
D.通电电流越大,受到的安培力越大,则线圈转动的越快,故D错误。
故选B。
6.B
【详解】
A.甲图的实验研究的是通电导体在磁场中受力而运动,电动机是依据此原理制成的,故A错误;
B.乙实验演示的是电流的磁效应,即奥斯特实验,说明通电导线周围存在着磁场,故B正确;
C.丙图实验可探究螺线管的磁场方向与电流方向的关系等,但不能直接探究其周围的磁感线分布情况,故C错误;
D.丁图中有电源,是电动机的原理,即通电导体在磁场中受到力的作用,故D错误;
故选B。
7.B
【详解】
该实验装置是研究通电导体在磁场中受力而运动,而电流的方向可以改变,所以能探究影响通电导线受到的磁场力方向的因素,故选ACD不符合题意,B符合题意。
故选B 。
8.B
【详解】
A.磁体周围存在着磁场,磁感线是为了形象的来描述磁感线而引入的一种物理模型,不是真实存在的,故A错误;
B.通电导体在磁场中要受到力的作用,其受力方向与电流方向和磁场方向有关,当改变其中一个方向时,导体受力作用方向将改变,若两个方向都改变时,导体的受力方向将不改变,故B正确;
C.在磁体外部,磁感线是从N极发出,回到S极;小磁针静止时,N极指示地理的北极,故据此即可判定地理位置的南北极与地磁的南北极是相反的,故C错误;
D.世界上第一个发现电流周围存在磁场,即电流的磁效应的物理学家是奥斯特,故D错误。
故选B。
9.A
【详解】
由所给电源正负极可知,题干图中电流方向向东,磁场方向是竖直向下的,已知此时导体ab受到磁场力的方向向北;
A.由右手螺旋定则知A图中螺线管上端为N极,下端为S极,通电导体所在位置磁场方向是竖直向上,导体中电流方向向西,根据甲图导体运动方向与磁场方向和电流方向的关系知,导体受到磁场力的方向向北,与甲图中ab的受力方向相同,故A符合题意;
B.由右手螺旋定则知B图中螺线管上端为N极,下端为S极,通电导体所在位置磁场方向是竖直向上,导体中电流方向向东,根据甲图导体运动方向与磁场方向和电流方向的关系知导体受到磁场力的方向向南,与甲图中ab的受力方向相反,故B不符合题意;
CD.由右手螺旋定则知CD 图中螺线管上端为S极,下端为N极,通电导体所在位置磁场方向是竖直向下,导体中电流方向向西,根据甲图导体运动方向与磁场方向和电流方向的关系知导体受到磁场力的方向向南,与甲图中ab的受力方向相反,故CD不符合题意。
故选A。
10.B
【详解】
干电池底部吸有强磁铁,周围存在磁场,导线框B侧和套在强磁铁上导电圆环C连接,则线框B侧有电流通过(即线框B侧是通电导体),所以线框B侧受到磁场对电流的作用力而运动;而线框A侧没有通电,所以A侧没有受到磁场的作用力;故B正确,ACD错误。
故选B。
11.A
【详解】
A.在上述实验现象中,通电导体在磁场中运动,是电能转化为机械能,故A错误,符合题意;
BC.只改变电流方向或者只改变磁感线方向,通电导体在磁场中运动的方向都会发生改变,说明通电导体在磁场中受力方向跟电流方向和磁感线方向有关,故BC正确,不符合题意;
D.电流方向和磁感线方向两个影响因素同时改变时,受力运动方向不变,故D正确,不符合题意
故选A
12.A
【详解】
A.由甲图可知,线圈匝数越多,吸引大头针数目越多,说明电磁铁磁性越强,即在电流一定时,匝数越少磁性越弱,故A正确;
B.奥斯特实验说明通电导线周围存在磁场,该磁场是通电导线产生的,与有无小磁针无关,故B错误;
C.图丙装置研究的是通电导线在磁场中受力运动,故C错误;
D.图丁中,当开关S闭合时,电磁铁获得磁性吸引衔铁向下运动,此时电铃响,灯和电动机不工作,故D错误。
故选A。
13. 向左 电流
【详解】
[1] 导体ab原来静止,受到磁场力后向左运动,说明磁场力的方向向左;
[2] 电流方向改变,受到的磁场力方向改变,说明通电导体ab在磁场中受力的方向与电流的方向有关。
14.外
【详解】
通电导体在磁场中受到力的作用,力的方向跟导体中的电流方向和磁场方向有关,当电流方向或磁场方向与原来相反时,力的方向也与原来相反;当电流方向和磁场方向同时改变时,力的方向不变。图乙可知,电子向右运动,所以电流的方向就是向左的,乙图中电流方向与甲图中电流方向相反,磁场方向不变,所以电子的受力情况与甲图中导体受力方向相反,垂直纸面向外。
15. 能 大 不同
【详解】
[1]如图所示,将线圈两端引线的漆皮一端全部刮掉,另一端只刮半周,这样当线圈转至平衡位置时,由于惯性继续转动,而不是受相反方向的力,当回到初始位置时,再次受力转动,从而使线圈继续转动下去。故图中线圈可以连续转动。
[2]如果通过线圈的电流变大,线圈受力变大,线圈的转动速度将变大。
[3]如果改变线圈中的电流方向,线圈受力方向改变,线圈的转动方向将改变。
16. 向左 同时改变电流方向和磁场方向,导体受力方向不变
【详解】
当只改变磁场方向或电流方向时,导体受力方向改变;当同时改变磁场方向和电流方向时,导体受力方向不变。
[1][2]若将磁场方向改为与原来相反,仍然向左拉动铜棒EF,则产生的感应电流方向和原来相反。铜棒GH所处的磁场方向改变,GH内的电流方向也改变,则GH的受力方向不变,运动方向还是向左。
17. 磁场对电流的作用 83.3% 16 kg 见解析
【详解】
(1)[1]电动机是根据磁场对通电导体有力的作用的原理工作的,实质是磁场对电流的作用。
(2)[2]行驶了300 km耗电60kW·h,即消耗的电能为
电动汽车的效率
(3)[3]汽油车和电动汽车重力相同,在相同的路面上以相同的速度与速行驶,受到的阻力相同;而受到的牵引力和阻力是一对平衡力,大小相等;故行驶相同的路程,牵引力做的有用功相等。
汽油完全燃烧完放的热量
需要消耗汽油的质量
(4)[4]纯电动汽车与传统燃油汽车相比噪声小;大气污染小;节约化石能源能量;利用效率高等。
18. 超声波 运动 D 240 bc 扬声器
【详解】
(1)[1]激光可以在透明介质中传播,而超声波是以波的形式传播,遇到障碍物时会反射从而被机器人接收,所以,机器人在行进过程中遇到玻璃等透明障碍物时,利用超声波才能较好感知到障碍物。
[2]机器人与障碍物之间的位置不断变化,以机器人为参照物,障碍物是运动的。
(2)[3]A.菲涅尔透镜能会聚红外线,是凸透镜,故A错误;
B.红外线属于电磁波,故B错误;
C.电流由下端流入电磁铁,由安培定则可知,电磁铁上端为N极,故C错误;
D.人体正常体温约37℃,体温38℃属于超温状态,机器人会报警,故D正确。
故选D。
(3)[4]机械功率为
P1=400W×60%=240W
机器人所受牵引力
因做匀速直线运动,由二力平衡,机器人受到的阻力为240N。
(4)[5]因为R1与RB串联,由串联分压原理可知,为维持U1两端电压稳定,磁敏电阻RB两端电压UB也应该随输入电压U的变化而发生变化,则RB阻值的变化量较大,由图可知应选择bc段。
[6]驱动电机原理是通电导体在磁场中受到力的作用,与扬声器相同,麦克风原理是电磁感应,故选扬声器。
19. AB 热 0.36 5×10﹣4 >
【详解】
(1)[1]A.固体可以传声,因此谷歌眼镜的耳机系统采用骨传导是因为固体能够传声,故A正确;
B.wifi无线信号是通过电磁波来传递信息的,故B正确;
C.因为不同声音的音色不同,因此谷歌眼镜是通过音色来辨别声音是否由使用者发出,故C错误;
D.麦克风是将声信号转化成电信号的装置,扬声器是将电信号转化成声信号的装置,故D错误。
故选AB。
(2)[2]谷歌眼镜在使用中,由于电流的热效应会有明显的发热现象。
[3]已知Q=600mAh=0.6Ah,则谷歌眼镜在高负荷使用中平均功率:
P=
(3)[4][5]由F1L1=F2L2可得,
FC×BC=GA×BC
即压点感应器C所受压力:
F压力=FC=mAg=
×0.1×10-3kg×10N/kg=5×10-4N;
分别以B、C为支点,求出对应压力FC、FB;以B为支点,如图所示:
其中AO=1mm,BO=10mm,由几何知识可得OE=1mm,BE=5mm-1mm=4mm
所以重力的力臂为
BD=BE cos45°=4mm×mm,
根据杠杆平衡条件G×BD=FC×BC可得,
FC′=G ①
以C为支点,杠杆受重力G、B点垂直杠杆向上的支持力,如图所示:
由几何知识可得
CE=10mm-4mm=6mm
所以重力的力臂为
CF=CE cos45°=6mm×3mm;
根据杠杆平衡条件G×CF=FB×BC可得,
FB=G ②
由题意可得
故UB>UC。
20. 由c到d
【详解】
试题分析:(1)把正电荷定向移动的方向规定为电流的方向,电流从电源的正极出发经过开关从a到b到c到d回到负极;
(2)通电导体在磁场中受到力的方向与电流的方向和磁场的方向有关,磁场的方向不变,电流通过ab段和cd段时的方向刚好相反,所以受到磁场力的方向也刚好相反,如图所示,
考点:电流磁场的方向与电流的方向、磁场的方向有关
21.(1)A C (2)C (3)0.2—0.4
【详解】
试题分析:(1)通电螺线管磁场的强弱与电流的大小、线圈的多少和铁芯的有无有关.
(2)把测量动能的大小,转化成测量同一炮弹的射程,这是利用了转换思想,把不易测量的物理量转换成易测量的物理量.这与利用压强计测量液体的压强方法类似,把液体内部压强的大小转化成U型管中液面的高度差不同,形象易于比较.
(3)根据表格中信息知道撞针在0.2—0.4之间时,电磁炮的射程最远.
【考点定位】电与磁 物理实验方法
答案第1页,共2页
答案第1页,共2页
同课章节目录
- 第十章 机械能、内能及其转化
- 一 机械能
- 二 内能
- 三 探究——物质的比热容
- 四 热机
- 五 火箭
- 六 燃料的利用和环境保护
- 第十一章 简单电路
- 一 认识电路
- 二 学生实验:组装电路
- 三 电荷
- 四 电流
- 五 电压
- 六 探究——不同物质的导电性能
- 七 探究——影响电阻大小的因素
- 八 变阻器
- 第十二章 欧姆定律
- 一 学生实验:探究——电流与电压、电阻的关系
- 二 根据欧姆定律测量导体的电阻
- 三 串、并联电路中的电阻关系
- 四 欧姆定律的应用
- 第十三章 电功和电功率
- 一 电功和电能
- 二 电功率
- 三 学生实验:探究----小灯泡的电功率
- 四 电流的热效应
- 五 家庭电路
- 六 安全用电
- 第十四章 电磁现象
- 一 简单磁现象
- 二 磁场
- 三 电流的磁场
- 四 电磁铁及其应用
- 五 磁场对通电导线的作用力
- 六 直流电动机
- 七、学生实验:探究——产生感应电流的条件
- 第十五章 怎样传递信息——通信技术简介
- 一 电磁波
- 二 广播和电视
- 三 现代通信技术及发展前景
- 第十六章 粒子和宇宙
- 一 探索微观世界的历程
- 二 浩瀚的宇宙
- 三 能源:危机与希望