2021-2022学年最新北师大版物理八年级下册第九章 机械和功专项训练试题(Word版含答案)
文档属性
| 名称 | 2021-2022学年最新北师大版物理八年级下册第九章 机械和功专项训练试题(Word版含答案) |  | |
| 格式 | zip | ||
| 文件大小 | 262.6KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-05-05 22:54:58 | ||
图片预览
文档简介
北师大版物理八年级下册第九章 机械和功专项训练
考试时间:90分钟;命题人:物理教研组
考生注意:
1、本卷分第I卷(选择题)和第Ⅱ卷(非选择题)两部分,满分100分,考试时间90分钟
2、答卷前,考生务必用0.5毫米黑色签字笔将自己的姓名、班级填写在试卷规定位置上
3、答案必须写在试卷各个题目指定区域内相应的位置,如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带,不按以上要求作答的答案无效。
第I卷(选择题 30分)
一、单选题(10小题,每小题3分,共计30分)
1、下列关于功率和机械效率的说法正确的是( )
A.功率越小的机械做功越慢
B.功率越大的机械越省力
C.机械效率越低的机械做功越慢
D.机械效率越高的机械一定越省力
2、如图所示是使用简单机械匀速提升物体的四种方式,其中D图中绳子的悬挂点在杠杆的中心处。不计机械自重和摩擦,如果现在四种方式人提供的拉力大小相等,那么四个物体重力最大的是( )
A. B.
C. D.
3、甲、乙两台机器的功率相等,在相同的时间内通过的路程之比为3:1,则甲、乙两台机器的( )
A.做功之比为1:1,受到的牵引力之比为3:1
B.做功之比为1:1,受到的牵引力之比为1:1
C.做功之比为1:1,受到的牵引力之比为1:3
D.做功之比为1:3,受到的牵引力之比为3:1
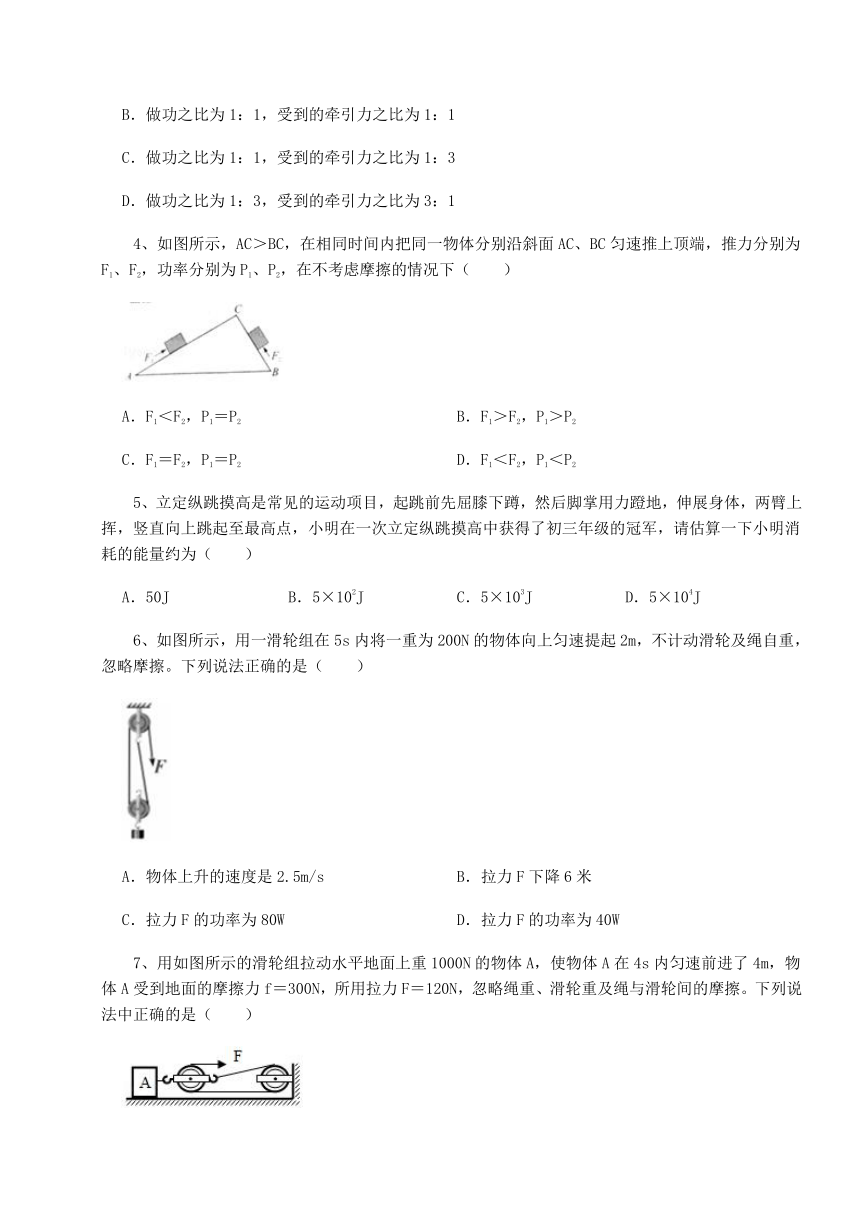
4、如图所示,AC>BC,在相同时间内把同一物体分别沿斜面AC、BC匀速推上顶端,推力分别为F1、F2,功率分别为P1、P2,在不考虑摩擦的情况下( )
A.F1<F2,P1=P2 B.F1>F2,P1>P2
C.F1=F2,P1=P2 D.F1<F2,P1<P2
5、立定纵跳摸高是常见的运动项目,起跳前先屈膝下蹲,然后脚掌用力蹬地,伸展身体,两臂上挥,竖直向上跳起至最高点,小明在一次立定纵跳摸高中获得了初三年级的冠军,请估算一下小明消耗的能量约为( )
A.50J B.5×102J C.5×103J D.5×104J
6、如图所示,用一滑轮组在5s内将一重为200N的物体向上匀速提起2m,不计动滑轮及绳自重,忽略摩擦。下列说法正确的是( )
A.物体上升的速度是2.5m/s B.拉力F下降6米
C.拉力F的功率为80W D.拉力F的功率为40W
7、用如图所示的滑轮组拉动水平地面上重1000N的物体A,使物体A在4s内匀速前进了4m,物体A受到地面的摩擦力f=300N,所用拉力F=120N,忽略绳重、滑轮重及绳与滑轮间的摩擦。下列说法中正确的是( )
A.绳子自由端在4s内移动了8m B.物体A重力做功的功率为1000W
C.物体A克服摩擦力做的功为480J D.滑轮组的机械效率约为83.3%
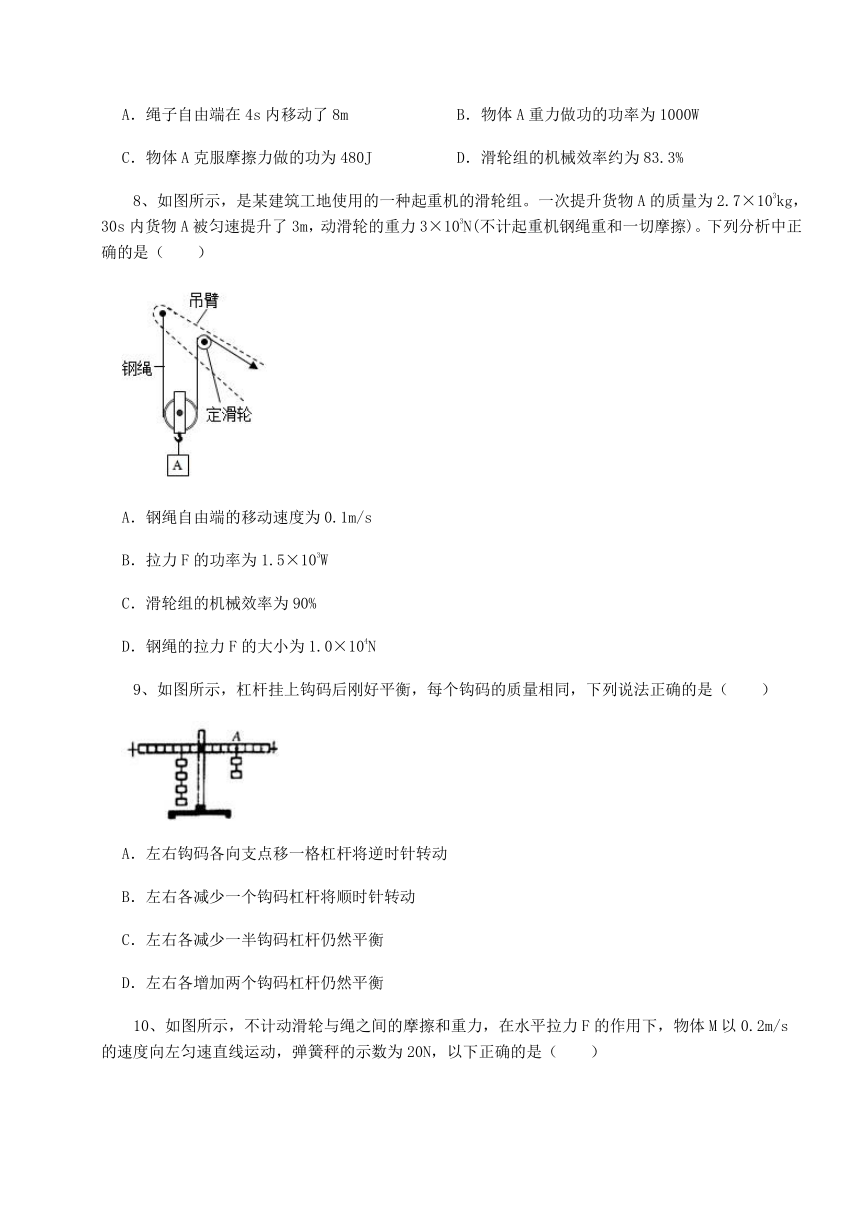
8、如图所示,是某建筑工地使用的一种起重机的滑轮组。一次提升货物A的质量为2.7×103kg,30s内货物A被匀速提升了3m,动滑轮的重力3×103N(不计起重机钢绳重和一切摩擦)。下列分析中正确的是( )
A.钢绳自由端的移动速度为0.1m/s
B.拉力F的功率为1.5×103W
C.滑轮组的机械效率为90%
D.钢绳的拉力F的大小为1.0×104N
9、如图所示,杠杆挂上钩码后刚好平衡,每个钩码的质量相同,下列说法正确的是( )
A.左右钩码各向支点移一格杠杆将逆时针转动
B.左右各减少一个钩码杠杆将顺时针转动
C.左右各减少一半钩码杠杆仍然平衡
D.左右各增加两个钩码杠杆仍然平衡
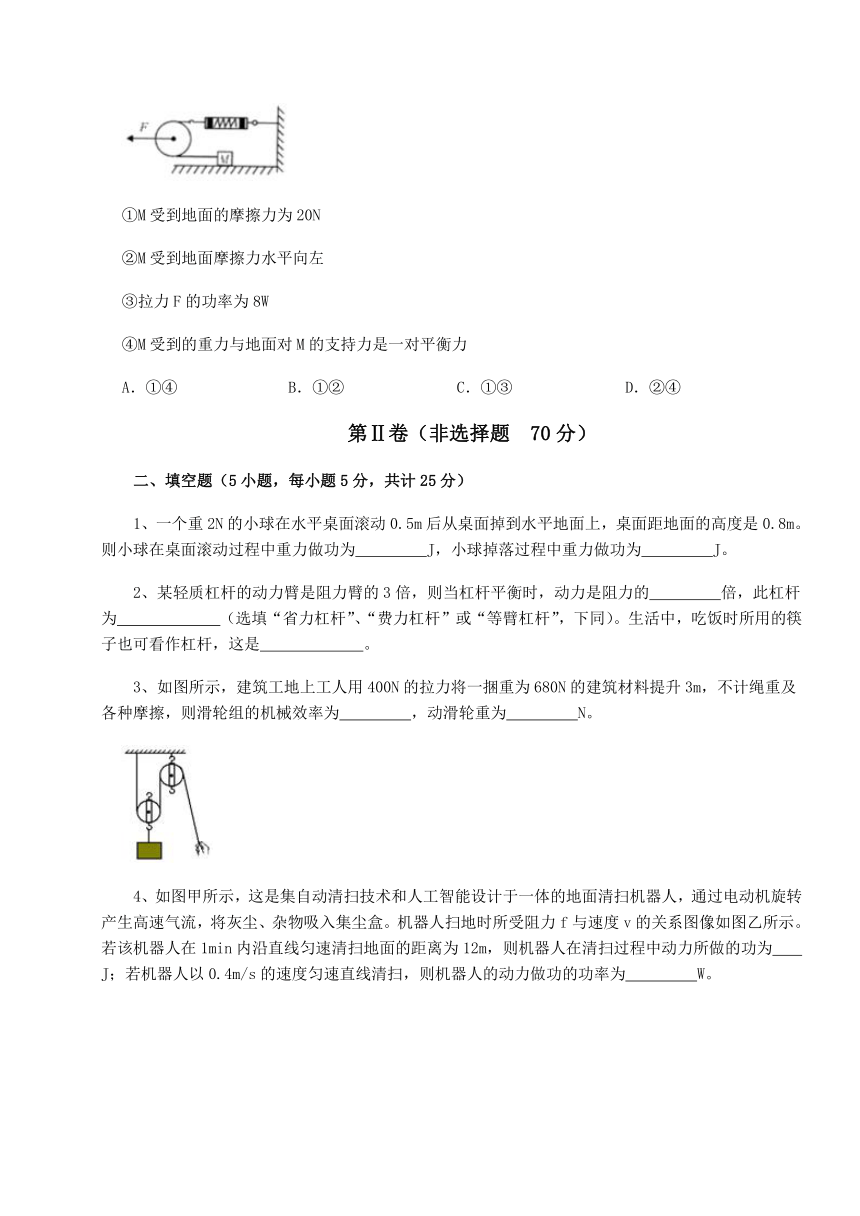
10、如图所示,不计动滑轮与绳之间的摩擦和重力,在水平拉力F的作用下,物体M以0.2m/s的速度向左匀速直线运动,弹簧秤的示数为20N,以下正确的是( )
①M受到地面的摩擦力为20N
②M受到地面摩擦力水平向左
③拉力F的功率为8W
④M受到的重力与地面对M的支持力是一对平衡力
A.①④ B.①② C.①③ D.②④
第Ⅱ卷(非选择题 70分)
二、填空题(5小题,每小题5分,共计25分)
1、一个重2N的小球在水平桌面滚动0.5m后从桌面掉到水平地面上,桌面距地面的高度是0.8m。则小球在桌面滚动过程中重力做功为 J,小球掉落过程中重力做功为 J。
2、某轻质杠杆的动力臂是阻力臂的3倍,则当杠杆平衡时,动力是阻力的 倍,此杠杆为 (选填“省力杠杆”、“费力杠杆”或“等臂杠杆”,下同)。生活中,吃饭时所用的筷子也可看作杠杆,这是 。
3、如图所示,建筑工地上工人用400N的拉力将一捆重为680N的建筑材料提升3m,不计绳重及各种摩擦,则滑轮组的机械效率为 ,动滑轮重为 N。
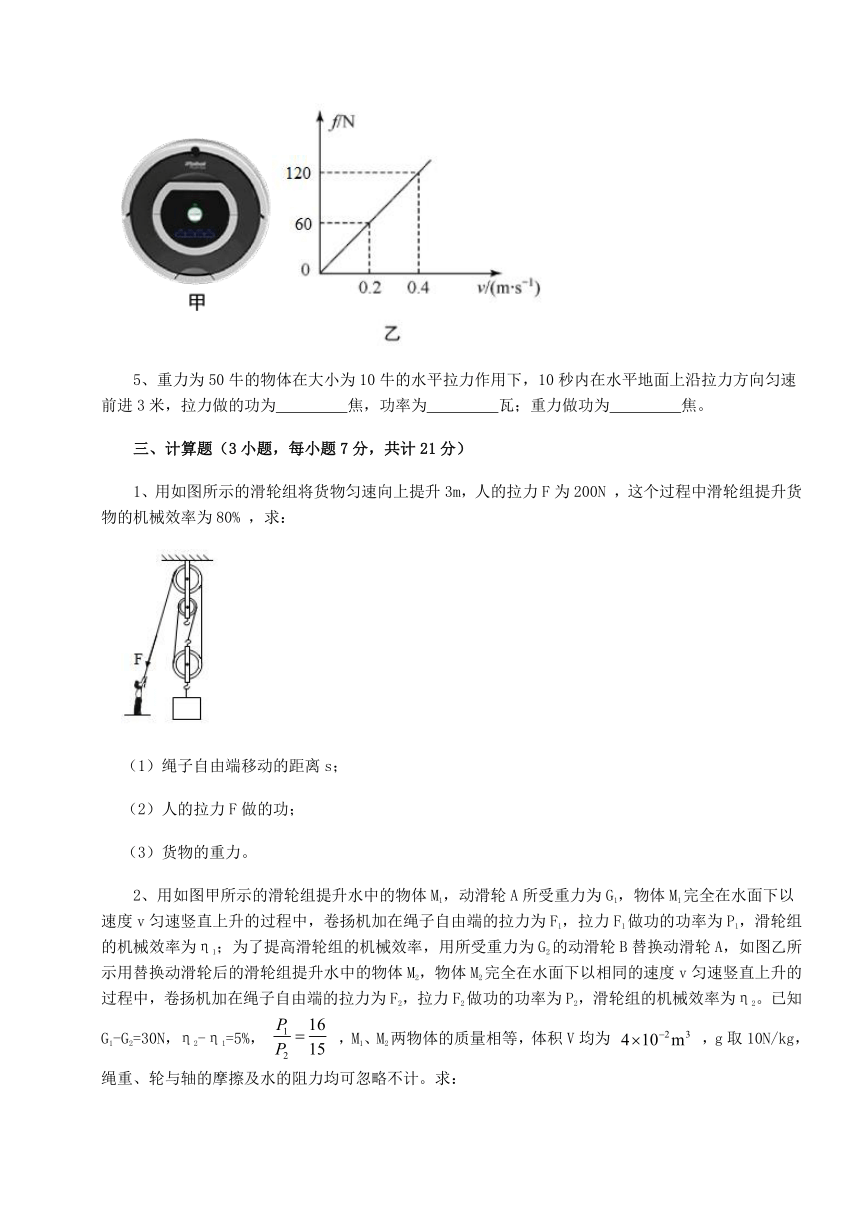
4、如图甲所示,这是集自动清扫技术和人工智能设计于一体的地面清扫机器人,通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒。机器人扫地时所受阻力f与速度v的关系图像如图乙所示。若该机器人在1min内沿直线匀速清扫地面的距离为12m,则机器人在清扫过程中动力所做的功为 J;若机器人以0.4m/s的速度匀速直线清扫,则机器人的动力做功的功率为 W。
5、重力为50牛的物体在大小为10牛的水平拉力作用下,10秒内在水平地面上沿拉力方向匀速前进3米,拉力做的功为 焦,功率为 瓦;重力做功为 焦。
三、计算题(3小题,每小题7分,共计21分)
1、用如图所示的滑轮组将货物匀速向上提升3m,人的拉力F为200N ,这个过程中滑轮组提升货物的机械效率为80% ,求:
(1)绳子自由端移动的距离s;
(2)人的拉力F做的功;
(3)货物的重力。
2、用如图甲所示的滑轮组提升水中的物体M1,动滑轮A所受重力为G1,物体M1完全在水面下以速度v匀速竖直上升的过程中,卷扬机加在绳子自由端的拉力为F1,拉力F1做功的功率为P1,滑轮组的机械效率为η1;为了提高滑轮组的机械效率,用所受重力为G2的动滑轮B替换动滑轮A,如图乙所示用替换动滑轮后的滑轮组提升水中的物体M2,物体M2完全在水面下以相同的速度v匀速竖直上升的过程中,卷扬机加在绳子自由端的拉力为F2,拉力F2做功的功率为P2,滑轮组的机械效率为η2。已知G1-G2=30N,η2-η1=5%, ,M1、M2两物体的质量相等,体积V均为 ,g取10N/kg,绳重、轮与轴的摩擦及水的阻力均可忽略不计。求:
(1)物体M1受到的浮力F浮;
(2)拉力F1与F2之比;
(3)物体M1受到的重力G。
3、2019年3月12日,我国自主研发建造的“天鲲号”绞吸挖泥船正式投产首航,其智能化水平以及挖掘系统、输送系统的高功率配置均为世界之最。绞吸挖泥船在需要疏挖的航道码头,先利用转动的铰刀将岩石机械切割使之松动,搅松水底的岩石与水混合成泥浆,经过真空吸泥管吸入泵体,再经过排泥管输送至排泥区回填造地。做一个形象的描述:“天鲲号”1小时挖的泥沙可以填满一个深为1m的足球场那么大的坑。“天鲲号”长140m、宽27.8m,满载排水量为17000t。(ρ水=1.0×103kg/m3,g取10N/kg)
(1)水面下6m处的船体受到水的压强是多少?
(2)满载时,求“天鲲号”受到水的浮力是多少?
(3)若某段工作时间内,“天鲲号”的泥泵输出功率恒为12000kW,排泥速度为2m/s。则泥泵对排泥管内泥浆的推力为多少?
四、实验探究(2小题,每小题12分,共计24分)
1、 “探究杠杆的平衡条件”实验。
(1)将装置放在水平桌面时,发现杠杆如图甲所示,要使它在水平位置平衡,可将杠杆右端的螺母向 调节(选填“左”或“右”)。
(2)实验时,小明同学在水平平衡的杠杆两侧挂上钩码,杠杆如图乙所示,为使杠杆仍在水平位置恢复平衡,他可将 向右移动适当的距离。
(3)实验时,小花同学根据图丙实验数据,得出杠杆平衡的条件是:动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离。你认为她的结论是否可靠?答: (选填:“可靠”或“不可靠”),理由是: 。
2、以下为“探究杠杆平衡条件”实验:
(1)如图甲,把杠杆放在支架上并置于水平桌面,静止时发现杠杆左低右高,为了使杠杆在水平位置平衡,应将右端的平衡螺母向 调节;
(2)如图乙,在已经调节好的杠杆左边A处挂4个钩码,要使杠杆仍在水平位置平衡,应在杠杆右边离支点4格的B处挂 个相同的钩码;之后在 两点再各增加1个钩码,杠杆将 (选填“不动”“顺时针旋转”或“逆时针旋转”);
(3)如图丙,在杠杆左边离支点4格的C处,用弹簧测力计与水平方向成 角斜向上拉,也可使杠杆在水平位置平衡,则弹簧测力计示数为 N(每个钩码重0.5N)。
-参考答案-
一、单选题
1、【答案】A
【解析】【解答】A.功率是描述物体做功快慢的物理量,功率越小,说明物体做功越慢,A符合题意;
B.机械省力与否与功率大小没有关系,B不符合题意;
C.机械效率低只能说明有用功在总功中占的百分比小,与机械做功快慢无关,C不符合题意;
D.机械效率高只能说明有用功在总功中占的百分比大,与机械是否省力无关,D不符合题意。
故答案为:A。
【分析】功率是描述物体做功快慢的物理量,物体功率越大,做功越快,但不见得做功多;机械效率代表的有用功占总功的比例。
2、【答案】B
【解析】【解答】A.图中为斜面,拉力做功等于克服物体重力做的功,则F1×4m=G×2m
解得拉力
B.图中滑轮组由3段绳子承担物重,则绳端的拉力
C.图中为定滑轮,定滑轮不省力,则F3=G3;
D.由杠杆的平衡条件知道,
又因为现在四种方式人提供的拉力大小相等,即
四个物体重力最大的是G2,B符合题意。
故答案为:B。
【分析】在滑轮组中,与动滑轮接触的绳子的段数越多,那么这个滑轮组就越省力,但是也越费距离。
3、【答案】C
【解析】【解答】解:(1)∵P= ,P1=P2,t1=t2,
∴ = = = ;(2)∵W=Fs, = ,
∴ = = × = = 。
故答案为:C
【分析】根据功率和时间的比例,计算做功比例,利用做功的关系结合路程判断牵引力的大小。
4、【答案】A
【解析】【解答】由于斜面AC倾斜角度小于BC,所以物体沿AC运动时拉力较小,即F1 <F2;拉力在两斜面上做的有用功相同,即都等于克服物体重力所做的功,又因为不计摩擦,使用光滑的斜面没有额外功,所以,拉力做功相同,即W1 =W2,所用时间相同,由P=W/t知道,拉力做功的功率相同,即P1 =P2,
故答案为:A。
【分析】斜面AC倾斜角度小于BC,所以物体沿AC运动时拉力较小,在不考虑摩擦的情况下 ,拉力在两斜面上做的有用功相同,即都等于克服物体重力所做的功,所以,拉力做功相同,即W1 =W2,所用时间相同,由P=W/t知道,拉力做功的功率相同.
5、【答案】B
【解析】【解答】人在跳起时消耗的能量可以用做功的多少计算,中学生的重力约500N,冠军跳起的高度约1m,做功为W=Gh=500N×1m=500J,B符合题意。
故答案为:B.
【分析】根据力和距离的乘积计算功的大小,也是消耗能量的多少。
6、【答案】C
【解析】【解答】A、物体上升的速度:v= = =0.4m/s,A不符合题意;B、由图可知,n=2,绳子自由端移动距离s=2h=2×2m=4m,B不符合题意;CD、不计动滑轮及绳自重,忽略摩擦,绳端的拉力:F= G= ×200N=100N,绳子的速度:v绳=2v物=2×0.4m/s=0.8m/s,拉力F的功率:P= = =Fv绳=100N×0.8m/s=80W,C符合题意,D不符合题意。
故答案为:C。
【分析】利用v= 求得物体上升的速度;
利用s=nh求得绳子自由端移动距离;
不计动滑轮及绳自重,忽略摩擦,利用F= G绳端的拉力;绳子的速度:v绳=nv物,利用P= = =Fv绳求得拉力F的功率.
7、【答案】D
【解析】【解答】解:A、由图可知,有三段绳子拉着动滑轮,F的距离为物体移动距离的3倍,即12m,A不符合题意;
B、物体在水平方向上移动,没有在重力的方向上通过距离,故重力做功的功率为0,B不符合题意;
C、摩擦力做的功为:W=fs=300N×4m=1200J,C不符合题意;
D、克服摩擦力做的功为有用功1200J,拉力做的总功为W总=Fs'=120N×12m=1440J,机械效率为η= = =83.3%,D符合题意。
故答案为:D。
【分析】用滑轮组提升物体,拉力作的功为总功,克服重力做的功为有用功,两者相除即为机械效率。
8、【答案】C
【解析】【解答】A.由图可知,承担物重的绳子段数 ,绳子移动距离
绳子自由端移动速度
A不符合题意;
BD.货物A的重力为
钢绳的拉力F的大小是
拉力F做功
拉力F的功率为 ,BD不符合题意;
C.滑轮组做的有用功是
滑轮组的机械效率为 ,C符合题意。
故答案为:C。
【分析】根据路程和时间的比值计算速度,结合绳子股数计算拉力的速度;根据物体的重力和高度的乘积计算有用功,拉力和移动的距离的乘积计算总功,功和手机端比值计算功率;有用功和总的比值计算机械效率;
9、【答案】C
【解析】【解答】A.当钩码移动后,杠杆左侧乘积为4×1,杠杆右侧的乘积为2×3,右侧重,杠杆顺时针转动,A不符合题意;
B.当杠杆左右减少一个钩码后,杠杆左侧3×2,杠杆右侧1×4,杠杆左侧偏重,会逆时针转动,B不符合题意;
C.当杠杆各减少一半时,杠杆左侧2×2,杠杆右侧1×4,两侧相等,杠杆继续平衡,C符合题意;
D.左右增加钩码时,杠杆左侧6×2,杠杆右侧4×4,杠杆两侧乘积不相等,杠杆不平衡,D不符合题意。
故答案为:C.
【分析】根据杠杆平衡条件,利用动力×动力臂=阻力×阻力臂是否相等,判断杠杆是否平衡。
10、【答案】A
【解析】【解答】①②弹簧秤的示数为20N,即绳子对弹簧秤的拉力为20N,因同一根绳子各处的拉力大小相同,所以绳子对物体M的拉力也为20N;物体M向左匀速直线运动,其受到的拉力和摩擦力是一对平衡力,所以M受到地面的摩擦力f=F拉=20N
方向与物体运动方向相反,即水平向右;故①正确,②错误;
③不计动滑轮与绳之间的摩擦和重力,由图知,拉力作用在动滑轮轴上,与右侧两段绳子的拉力平衡,则拉力的大小为F=2F示=2×20N=40N
由图知,n=2,且拉力F作用在动滑轮轴上,费力但省一半的距离,则拉力端移动的速度是物体移动速度的 ,故拉力端移动的速度v拉力端= v= ×0.2m/s=0.1m/s
拉力的功率为P=Fv拉力端=40N×0.1m/s=4W
故③错误;
④M受到的重力与地面对M的支持力大小相同、方向相反、在同一直线上、作用在同一个物体上,所以二力是一对平衡力,故④正确;
综上可知,只有①④正确。
故答案为:A。
【分析】作用在动滑轮上的拉力是绳端拉力的二倍;重力与地面的支持力大小相同、方向相反、在同一直线上、作用在同一个物体上,所以二力是一对平衡力;根据力和速度的乘积计算功率的大小。
二、填空题
1、【答案】0;1.6
【解析】【解答】①小球在水平桌面滚动过程中,因小球在重力方向上没有移动距离,所以,此过程中重力对小球所做的功为0J;②小球从桌面掉到水平地面上,此过程中小球沿重力方向移动了0.8m的距离,则重力对小球所做的功:W=Gh=2N×0.8m=1.6J。故答案为:0;1.6。
【分析】水平桌面滚动,重力的方向与运动方向垂直,不做功;
再利用W=Gh求得 小球掉落过程中重力做功大小.
2、【答案】;省力杠杆;费力杠杆
【解析】【解答】根据 可知,动力与阻力之比为
故动力是阻力的 。
动力小于阻力,故此杠杆为省力杠杆。
筷子的动力臂小于阻力臂,则动力大于阻力,故为费力杠杆。
【分析】动力臂大于阻力臂的杠杆为省力杠杆,省力杠杆可以省力,但是费距离,动力臂等于阻力臂的杠杆为等臂杠杆,动力臂小于阻力臂的杠杆为费力杠杆,费力杠杆可以省距离,但是费力。
3、【答案】85%;120
【解析】【解答】由图知,n=2,拉力端移动的距离
拉力做的总功
拉力做的有用功
滑轮组的机械效率 不计绳重和摩擦,由 可得,动滑轮重:
【分析】本题考查了使用滑轮组时有用功、总功、机械效率的计算。
4、【答案】720;48
【解析】【解答】机器人匀速清扫时的速度
由图乙知,此时的机器人所受的阻力f=60N
而机器人的动力与阻力是一对平衡力,所以这个过程中,动力所做的功W=Fs=fs=60N×12m=720m
当机器人以0.4m/s的速度匀速清扫时,由图乙知,机器人所受的动力F=f1=120N
则机器人动力做功的功率P=Fv1=120N×0.4m/s=48J
【分析】先利用速度计算公式求得机器人匀速清扫时的速度,再根据机器人扫地时所受阻力与速度的关系图像得出阻力。同理,由根据机器人扫地时所受阻力与速度的关系图像得出阻力,P=Fv可求得机器人的动力功率。
5、【答案】30;3;0
【解析】【解答】拉力做的功为 功率为 重力的方向竖直向下,物体沿水平方向前进,所以重力不做功,即重力做功为0J。
【分析】求解外力做功,利用外力大小乘以位移在力的方向上移动的距离即可,即W=Fs;利用外力做的功除以做功需要的时间即为功率。
三、计算题
1、【答案】(1)解:由图可知有3股绳,绳子自由端移动的距离为s=nh=3×3m=9m
答:绳子自由端移动的距离为9m;
(2)解:人的拉力做的功为W=Fs=200N×9m=1800J
答:人的拉力做的功为1800J;
(3)解:由滑轮组提升货物的机械效率为80%,可得
推导出货物的重力为
答:货物的重力为480N。
【解析】【分析】(1)根据滑轮组的股数计算距离;(2)根据力和距离的乘积计算功的大小;(3)根据滑轮组的机械效率和拉力,可以计算物体的重力。
2、【答案】(1)解:物体M1受到的浮力F浮=ρ水gV排=ρ水gV=1×103kg/m3×10N/kg×4×10-2m3=400N
答:物体M1受到的浮力F浮为400N;
(2)解:由图知,n=2,由功率的公式
可得P1=F1v绳=2F1v
P2=F2v绳=2F2v
则拉力F1与F2之比F1∶F2=P1∶P2=16∶15①
答:拉力F1与F2之比为16∶15;
(3)解:绳重、轮与轴的摩擦及水的阻力均可忽略不计,拉力F1=
可得2F1+F浮=G+G1-----②
拉力F2=
可得2F2+F浮=G+G2-----③
②-③得G1-G2=2(F1-F2)
由题知G1-G2=30N
所以可得F1-F2=15N-----④
由①④解得F1=240N,F2=225N
在水中提升物体时,滑轮组的机械效率
已知η2-η1=5%
解得G=760N。
答:物体M1受到的重力G为760N。
【解析】【分析】(1)阿基米德原理给出了一种求解物体浮力大小的方法,F浮=ρ液gV排,ρ液是液体的密度,V排使物体排开水的体积;
(2)结合拉力的功率和速度求解拉力大小的比值即可;
(3)对于该滑轮组,与动滑轮接触的有两段绳子,所以自由端移动的距离是物体移动的2倍,结合自由端移动的距离求解物体运动的距离;拉力为物重和滑轮重之和的一半,拉力作的功为总功,克服重力做的功为有用功,利用公式W=Fs求解做功,两者相除即为机械效率,利用机械效率列方程求解物体的重力即可。
3、【答案】(1)解:水面下6m处的船体受到水的压强是:p=ρgh=1.0×103kg/m3×10N/kg×6m=6×104Pa
(2)解:由题意知:m排=17000t=1.7×107kg
排开水所受的重力为G排=m排g=1.7×107kg×10N/kg=1.7×108N
“天鲲号”受到水的浮力是F浮=G排=1.7×108N
(3)解:由题意知:P=12000kW=1.2×107W
根据P=W/t=Fs/t=Fv可得,泥泵对排泥管内泥浆的推力为F=P/v=1.2×107W/2m/s=6×106N
【解析】【分析】(1)根据液体密度和深度计算液体压强大小;(2)根据物体排开液体的质量计算重力,再计算浮力大小;(3)根据功率和速度,可以计算拉力大小。
四、实验探究
1、【答案】(1)右
(2)钩码
(3)不可靠;仅凭一次实验得出结论,具有偶然性
【解析】【解答】(1)杠杆右边高,应将杠杆平衡螺母向右端调节,使杠杆在水平位置平衡。
(2)杠杆右边高,说明左边力和力臂乘积大,为使杠杆仍在水平位置恢复平衡,可将钩码右移。
(3)仅凭一次实验得出结论,具有偶然性,所以要多次实验找到普遍规律,因此她的结论不可靠。
【分析】(1)测量前要调节平衡螺母使杠杆平衡。
(2)开始实验后不能调节平衡螺母。
(3) 要多次实验找到普遍规律,避免偶然性。
2、【答案】(1)右
(2)3;顺时针旋转
(3)3
【解析】【解答】(1)静止时左低右高,则杠杆左边重,需要将平衡螺母往右调。
(2)根据杠杆平衡原理
可知A离支点距离为3格,悬挂4个钩码,B离支点的距离为4格,则应该挂3个钩码。两边同时增加钩码时,杠杆不平衡,会顺时针旋转。
(3)根据杠杆平衡原理
A离支点距离为3格,悬挂4个钩码,C离支点的距离为4格,且力的方向与水平方向成 角,则
【分析】(1)调节杠杆平衡,杠杆的哪一端高就把平衡螺母往哪端调,最后使杠杆在水平位置平衡;
(2)结合杠杆的动力、动力臂、阻力、阻力臂大小,求解两侧动力、动力臂的乘积和阻力、阻力臂的乘积,谁的乘积大就往哪边偏;
(3)杠杆处于平衡状态,结合动力、动力臂、阻力、阻力臂,利用杠杆的平衡条件分析求解即可。
考试时间:90分钟;命题人:物理教研组
考生注意:
1、本卷分第I卷(选择题)和第Ⅱ卷(非选择题)两部分,满分100分,考试时间90分钟
2、答卷前,考生务必用0.5毫米黑色签字笔将自己的姓名、班级填写在试卷规定位置上
3、答案必须写在试卷各个题目指定区域内相应的位置,如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带,不按以上要求作答的答案无效。
第I卷(选择题 30分)
一、单选题(10小题,每小题3分,共计30分)
1、下列关于功率和机械效率的说法正确的是( )
A.功率越小的机械做功越慢
B.功率越大的机械越省力
C.机械效率越低的机械做功越慢
D.机械效率越高的机械一定越省力
2、如图所示是使用简单机械匀速提升物体的四种方式,其中D图中绳子的悬挂点在杠杆的中心处。不计机械自重和摩擦,如果现在四种方式人提供的拉力大小相等,那么四个物体重力最大的是( )
A. B.
C. D.
3、甲、乙两台机器的功率相等,在相同的时间内通过的路程之比为3:1,则甲、乙两台机器的( )
A.做功之比为1:1,受到的牵引力之比为3:1
B.做功之比为1:1,受到的牵引力之比为1:1
C.做功之比为1:1,受到的牵引力之比为1:3
D.做功之比为1:3,受到的牵引力之比为3:1
4、如图所示,AC>BC,在相同时间内把同一物体分别沿斜面AC、BC匀速推上顶端,推力分别为F1、F2,功率分别为P1、P2,在不考虑摩擦的情况下( )
A.F1<F2,P1=P2 B.F1>F2,P1>P2
C.F1=F2,P1=P2 D.F1<F2,P1<P2
5、立定纵跳摸高是常见的运动项目,起跳前先屈膝下蹲,然后脚掌用力蹬地,伸展身体,两臂上挥,竖直向上跳起至最高点,小明在一次立定纵跳摸高中获得了初三年级的冠军,请估算一下小明消耗的能量约为( )
A.50J B.5×102J C.5×103J D.5×104J
6、如图所示,用一滑轮组在5s内将一重为200N的物体向上匀速提起2m,不计动滑轮及绳自重,忽略摩擦。下列说法正确的是( )
A.物体上升的速度是2.5m/s B.拉力F下降6米
C.拉力F的功率为80W D.拉力F的功率为40W
7、用如图所示的滑轮组拉动水平地面上重1000N的物体A,使物体A在4s内匀速前进了4m,物体A受到地面的摩擦力f=300N,所用拉力F=120N,忽略绳重、滑轮重及绳与滑轮间的摩擦。下列说法中正确的是( )
A.绳子自由端在4s内移动了8m B.物体A重力做功的功率为1000W
C.物体A克服摩擦力做的功为480J D.滑轮组的机械效率约为83.3%
8、如图所示,是某建筑工地使用的一种起重机的滑轮组。一次提升货物A的质量为2.7×103kg,30s内货物A被匀速提升了3m,动滑轮的重力3×103N(不计起重机钢绳重和一切摩擦)。下列分析中正确的是( )
A.钢绳自由端的移动速度为0.1m/s
B.拉力F的功率为1.5×103W
C.滑轮组的机械效率为90%
D.钢绳的拉力F的大小为1.0×104N
9、如图所示,杠杆挂上钩码后刚好平衡,每个钩码的质量相同,下列说法正确的是( )
A.左右钩码各向支点移一格杠杆将逆时针转动
B.左右各减少一个钩码杠杆将顺时针转动
C.左右各减少一半钩码杠杆仍然平衡
D.左右各增加两个钩码杠杆仍然平衡
10、如图所示,不计动滑轮与绳之间的摩擦和重力,在水平拉力F的作用下,物体M以0.2m/s的速度向左匀速直线运动,弹簧秤的示数为20N,以下正确的是( )
①M受到地面的摩擦力为20N
②M受到地面摩擦力水平向左
③拉力F的功率为8W
④M受到的重力与地面对M的支持力是一对平衡力
A.①④ B.①② C.①③ D.②④
第Ⅱ卷(非选择题 70分)
二、填空题(5小题,每小题5分,共计25分)
1、一个重2N的小球在水平桌面滚动0.5m后从桌面掉到水平地面上,桌面距地面的高度是0.8m。则小球在桌面滚动过程中重力做功为 J,小球掉落过程中重力做功为 J。
2、某轻质杠杆的动力臂是阻力臂的3倍,则当杠杆平衡时,动力是阻力的 倍,此杠杆为 (选填“省力杠杆”、“费力杠杆”或“等臂杠杆”,下同)。生活中,吃饭时所用的筷子也可看作杠杆,这是 。
3、如图所示,建筑工地上工人用400N的拉力将一捆重为680N的建筑材料提升3m,不计绳重及各种摩擦,则滑轮组的机械效率为 ,动滑轮重为 N。
4、如图甲所示,这是集自动清扫技术和人工智能设计于一体的地面清扫机器人,通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒。机器人扫地时所受阻力f与速度v的关系图像如图乙所示。若该机器人在1min内沿直线匀速清扫地面的距离为12m,则机器人在清扫过程中动力所做的功为 J;若机器人以0.4m/s的速度匀速直线清扫,则机器人的动力做功的功率为 W。
5、重力为50牛的物体在大小为10牛的水平拉力作用下,10秒内在水平地面上沿拉力方向匀速前进3米,拉力做的功为 焦,功率为 瓦;重力做功为 焦。
三、计算题(3小题,每小题7分,共计21分)
1、用如图所示的滑轮组将货物匀速向上提升3m,人的拉力F为200N ,这个过程中滑轮组提升货物的机械效率为80% ,求:
(1)绳子自由端移动的距离s;
(2)人的拉力F做的功;
(3)货物的重力。
2、用如图甲所示的滑轮组提升水中的物体M1,动滑轮A所受重力为G1,物体M1完全在水面下以速度v匀速竖直上升的过程中,卷扬机加在绳子自由端的拉力为F1,拉力F1做功的功率为P1,滑轮组的机械效率为η1;为了提高滑轮组的机械效率,用所受重力为G2的动滑轮B替换动滑轮A,如图乙所示用替换动滑轮后的滑轮组提升水中的物体M2,物体M2完全在水面下以相同的速度v匀速竖直上升的过程中,卷扬机加在绳子自由端的拉力为F2,拉力F2做功的功率为P2,滑轮组的机械效率为η2。已知G1-G2=30N,η2-η1=5%, ,M1、M2两物体的质量相等,体积V均为 ,g取10N/kg,绳重、轮与轴的摩擦及水的阻力均可忽略不计。求:
(1)物体M1受到的浮力F浮;
(2)拉力F1与F2之比;
(3)物体M1受到的重力G。
3、2019年3月12日,我国自主研发建造的“天鲲号”绞吸挖泥船正式投产首航,其智能化水平以及挖掘系统、输送系统的高功率配置均为世界之最。绞吸挖泥船在需要疏挖的航道码头,先利用转动的铰刀将岩石机械切割使之松动,搅松水底的岩石与水混合成泥浆,经过真空吸泥管吸入泵体,再经过排泥管输送至排泥区回填造地。做一个形象的描述:“天鲲号”1小时挖的泥沙可以填满一个深为1m的足球场那么大的坑。“天鲲号”长140m、宽27.8m,满载排水量为17000t。(ρ水=1.0×103kg/m3,g取10N/kg)
(1)水面下6m处的船体受到水的压强是多少?
(2)满载时,求“天鲲号”受到水的浮力是多少?
(3)若某段工作时间内,“天鲲号”的泥泵输出功率恒为12000kW,排泥速度为2m/s。则泥泵对排泥管内泥浆的推力为多少?
四、实验探究(2小题,每小题12分,共计24分)
1、 “探究杠杆的平衡条件”实验。
(1)将装置放在水平桌面时,发现杠杆如图甲所示,要使它在水平位置平衡,可将杠杆右端的螺母向 调节(选填“左”或“右”)。
(2)实验时,小明同学在水平平衡的杠杆两侧挂上钩码,杠杆如图乙所示,为使杠杆仍在水平位置恢复平衡,他可将 向右移动适当的距离。
(3)实验时,小花同学根据图丙实验数据,得出杠杆平衡的条件是:动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离。你认为她的结论是否可靠?答: (选填:“可靠”或“不可靠”),理由是: 。
2、以下为“探究杠杆平衡条件”实验:
(1)如图甲,把杠杆放在支架上并置于水平桌面,静止时发现杠杆左低右高,为了使杠杆在水平位置平衡,应将右端的平衡螺母向 调节;
(2)如图乙,在已经调节好的杠杆左边A处挂4个钩码,要使杠杆仍在水平位置平衡,应在杠杆右边离支点4格的B处挂 个相同的钩码;之后在 两点再各增加1个钩码,杠杆将 (选填“不动”“顺时针旋转”或“逆时针旋转”);
(3)如图丙,在杠杆左边离支点4格的C处,用弹簧测力计与水平方向成 角斜向上拉,也可使杠杆在水平位置平衡,则弹簧测力计示数为 N(每个钩码重0.5N)。
-参考答案-
一、单选题
1、【答案】A
【解析】【解答】A.功率是描述物体做功快慢的物理量,功率越小,说明物体做功越慢,A符合题意;
B.机械省力与否与功率大小没有关系,B不符合题意;
C.机械效率低只能说明有用功在总功中占的百分比小,与机械做功快慢无关,C不符合题意;
D.机械效率高只能说明有用功在总功中占的百分比大,与机械是否省力无关,D不符合题意。
故答案为:A。
【分析】功率是描述物体做功快慢的物理量,物体功率越大,做功越快,但不见得做功多;机械效率代表的有用功占总功的比例。
2、【答案】B
【解析】【解答】A.图中为斜面,拉力做功等于克服物体重力做的功,则F1×4m=G×2m
解得拉力
B.图中滑轮组由3段绳子承担物重,则绳端的拉力
C.图中为定滑轮,定滑轮不省力,则F3=G3;
D.由杠杆的平衡条件知道,
又因为现在四种方式人提供的拉力大小相等,即
四个物体重力最大的是G2,B符合题意。
故答案为:B。
【分析】在滑轮组中,与动滑轮接触的绳子的段数越多,那么这个滑轮组就越省力,但是也越费距离。
3、【答案】C
【解析】【解答】解:(1)∵P= ,P1=P2,t1=t2,
∴ = = = ;(2)∵W=Fs, = ,
∴ = = × = = 。
故答案为:C
【分析】根据功率和时间的比例,计算做功比例,利用做功的关系结合路程判断牵引力的大小。
4、【答案】A
【解析】【解答】由于斜面AC倾斜角度小于BC,所以物体沿AC运动时拉力较小,即F1 <F2;拉力在两斜面上做的有用功相同,即都等于克服物体重力所做的功,又因为不计摩擦,使用光滑的斜面没有额外功,所以,拉力做功相同,即W1 =W2,所用时间相同,由P=W/t知道,拉力做功的功率相同,即P1 =P2,
故答案为:A。
【分析】斜面AC倾斜角度小于BC,所以物体沿AC运动时拉力较小,在不考虑摩擦的情况下 ,拉力在两斜面上做的有用功相同,即都等于克服物体重力所做的功,所以,拉力做功相同,即W1 =W2,所用时间相同,由P=W/t知道,拉力做功的功率相同.
5、【答案】B
【解析】【解答】人在跳起时消耗的能量可以用做功的多少计算,中学生的重力约500N,冠军跳起的高度约1m,做功为W=Gh=500N×1m=500J,B符合题意。
故答案为:B.
【分析】根据力和距离的乘积计算功的大小,也是消耗能量的多少。
6、【答案】C
【解析】【解答】A、物体上升的速度:v= = =0.4m/s,A不符合题意;B、由图可知,n=2,绳子自由端移动距离s=2h=2×2m=4m,B不符合题意;CD、不计动滑轮及绳自重,忽略摩擦,绳端的拉力:F= G= ×200N=100N,绳子的速度:v绳=2v物=2×0.4m/s=0.8m/s,拉力F的功率:P= = =Fv绳=100N×0.8m/s=80W,C符合题意,D不符合题意。
故答案为:C。
【分析】利用v= 求得物体上升的速度;
利用s=nh求得绳子自由端移动距离;
不计动滑轮及绳自重,忽略摩擦,利用F= G绳端的拉力;绳子的速度:v绳=nv物,利用P= = =Fv绳求得拉力F的功率.
7、【答案】D
【解析】【解答】解:A、由图可知,有三段绳子拉着动滑轮,F的距离为物体移动距离的3倍,即12m,A不符合题意;
B、物体在水平方向上移动,没有在重力的方向上通过距离,故重力做功的功率为0,B不符合题意;
C、摩擦力做的功为:W=fs=300N×4m=1200J,C不符合题意;
D、克服摩擦力做的功为有用功1200J,拉力做的总功为W总=Fs'=120N×12m=1440J,机械效率为η= = =83.3%,D符合题意。
故答案为:D。
【分析】用滑轮组提升物体,拉力作的功为总功,克服重力做的功为有用功,两者相除即为机械效率。
8、【答案】C
【解析】【解答】A.由图可知,承担物重的绳子段数 ,绳子移动距离
绳子自由端移动速度
A不符合题意;
BD.货物A的重力为
钢绳的拉力F的大小是
拉力F做功
拉力F的功率为 ,BD不符合题意;
C.滑轮组做的有用功是
滑轮组的机械效率为 ,C符合题意。
故答案为:C。
【分析】根据路程和时间的比值计算速度,结合绳子股数计算拉力的速度;根据物体的重力和高度的乘积计算有用功,拉力和移动的距离的乘积计算总功,功和手机端比值计算功率;有用功和总的比值计算机械效率;
9、【答案】C
【解析】【解答】A.当钩码移动后,杠杆左侧乘积为4×1,杠杆右侧的乘积为2×3,右侧重,杠杆顺时针转动,A不符合题意;
B.当杠杆左右减少一个钩码后,杠杆左侧3×2,杠杆右侧1×4,杠杆左侧偏重,会逆时针转动,B不符合题意;
C.当杠杆各减少一半时,杠杆左侧2×2,杠杆右侧1×4,两侧相等,杠杆继续平衡,C符合题意;
D.左右增加钩码时,杠杆左侧6×2,杠杆右侧4×4,杠杆两侧乘积不相等,杠杆不平衡,D不符合题意。
故答案为:C.
【分析】根据杠杆平衡条件,利用动力×动力臂=阻力×阻力臂是否相等,判断杠杆是否平衡。
10、【答案】A
【解析】【解答】①②弹簧秤的示数为20N,即绳子对弹簧秤的拉力为20N,因同一根绳子各处的拉力大小相同,所以绳子对物体M的拉力也为20N;物体M向左匀速直线运动,其受到的拉力和摩擦力是一对平衡力,所以M受到地面的摩擦力f=F拉=20N
方向与物体运动方向相反,即水平向右;故①正确,②错误;
③不计动滑轮与绳之间的摩擦和重力,由图知,拉力作用在动滑轮轴上,与右侧两段绳子的拉力平衡,则拉力的大小为F=2F示=2×20N=40N
由图知,n=2,且拉力F作用在动滑轮轴上,费力但省一半的距离,则拉力端移动的速度是物体移动速度的 ,故拉力端移动的速度v拉力端= v= ×0.2m/s=0.1m/s
拉力的功率为P=Fv拉力端=40N×0.1m/s=4W
故③错误;
④M受到的重力与地面对M的支持力大小相同、方向相反、在同一直线上、作用在同一个物体上,所以二力是一对平衡力,故④正确;
综上可知,只有①④正确。
故答案为:A。
【分析】作用在动滑轮上的拉力是绳端拉力的二倍;重力与地面的支持力大小相同、方向相反、在同一直线上、作用在同一个物体上,所以二力是一对平衡力;根据力和速度的乘积计算功率的大小。
二、填空题
1、【答案】0;1.6
【解析】【解答】①小球在水平桌面滚动过程中,因小球在重力方向上没有移动距离,所以,此过程中重力对小球所做的功为0J;②小球从桌面掉到水平地面上,此过程中小球沿重力方向移动了0.8m的距离,则重力对小球所做的功:W=Gh=2N×0.8m=1.6J。故答案为:0;1.6。
【分析】水平桌面滚动,重力的方向与运动方向垂直,不做功;
再利用W=Gh求得 小球掉落过程中重力做功大小.
2、【答案】;省力杠杆;费力杠杆
【解析】【解答】根据 可知,动力与阻力之比为
故动力是阻力的 。
动力小于阻力,故此杠杆为省力杠杆。
筷子的动力臂小于阻力臂,则动力大于阻力,故为费力杠杆。
【分析】动力臂大于阻力臂的杠杆为省力杠杆,省力杠杆可以省力,但是费距离,动力臂等于阻力臂的杠杆为等臂杠杆,动力臂小于阻力臂的杠杆为费力杠杆,费力杠杆可以省距离,但是费力。
3、【答案】85%;120
【解析】【解答】由图知,n=2,拉力端移动的距离
拉力做的总功
拉力做的有用功
滑轮组的机械效率 不计绳重和摩擦,由 可得,动滑轮重:
【分析】本题考查了使用滑轮组时有用功、总功、机械效率的计算。
4、【答案】720;48
【解析】【解答】机器人匀速清扫时的速度
由图乙知,此时的机器人所受的阻力f=60N
而机器人的动力与阻力是一对平衡力,所以这个过程中,动力所做的功W=Fs=fs=60N×12m=720m
当机器人以0.4m/s的速度匀速清扫时,由图乙知,机器人所受的动力F=f1=120N
则机器人动力做功的功率P=Fv1=120N×0.4m/s=48J
【分析】先利用速度计算公式求得机器人匀速清扫时的速度,再根据机器人扫地时所受阻力与速度的关系图像得出阻力。同理,由根据机器人扫地时所受阻力与速度的关系图像得出阻力,P=Fv可求得机器人的动力功率。
5、【答案】30;3;0
【解析】【解答】拉力做的功为 功率为 重力的方向竖直向下,物体沿水平方向前进,所以重力不做功,即重力做功为0J。
【分析】求解外力做功,利用外力大小乘以位移在力的方向上移动的距离即可,即W=Fs;利用外力做的功除以做功需要的时间即为功率。
三、计算题
1、【答案】(1)解:由图可知有3股绳,绳子自由端移动的距离为s=nh=3×3m=9m
答:绳子自由端移动的距离为9m;
(2)解:人的拉力做的功为W=Fs=200N×9m=1800J
答:人的拉力做的功为1800J;
(3)解:由滑轮组提升货物的机械效率为80%,可得
推导出货物的重力为
答:货物的重力为480N。
【解析】【分析】(1)根据滑轮组的股数计算距离;(2)根据力和距离的乘积计算功的大小;(3)根据滑轮组的机械效率和拉力,可以计算物体的重力。
2、【答案】(1)解:物体M1受到的浮力F浮=ρ水gV排=ρ水gV=1×103kg/m3×10N/kg×4×10-2m3=400N
答:物体M1受到的浮力F浮为400N;
(2)解:由图知,n=2,由功率的公式
可得P1=F1v绳=2F1v
P2=F2v绳=2F2v
则拉力F1与F2之比F1∶F2=P1∶P2=16∶15①
答:拉力F1与F2之比为16∶15;
(3)解:绳重、轮与轴的摩擦及水的阻力均可忽略不计,拉力F1=
可得2F1+F浮=G+G1-----②
拉力F2=
可得2F2+F浮=G+G2-----③
②-③得G1-G2=2(F1-F2)
由题知G1-G2=30N
所以可得F1-F2=15N-----④
由①④解得F1=240N,F2=225N
在水中提升物体时,滑轮组的机械效率
已知η2-η1=5%
解得G=760N。
答:物体M1受到的重力G为760N。
【解析】【分析】(1)阿基米德原理给出了一种求解物体浮力大小的方法,F浮=ρ液gV排,ρ液是液体的密度,V排使物体排开水的体积;
(2)结合拉力的功率和速度求解拉力大小的比值即可;
(3)对于该滑轮组,与动滑轮接触的有两段绳子,所以自由端移动的距离是物体移动的2倍,结合自由端移动的距离求解物体运动的距离;拉力为物重和滑轮重之和的一半,拉力作的功为总功,克服重力做的功为有用功,利用公式W=Fs求解做功,两者相除即为机械效率,利用机械效率列方程求解物体的重力即可。
3、【答案】(1)解:水面下6m处的船体受到水的压强是:p=ρgh=1.0×103kg/m3×10N/kg×6m=6×104Pa
(2)解:由题意知:m排=17000t=1.7×107kg
排开水所受的重力为G排=m排g=1.7×107kg×10N/kg=1.7×108N
“天鲲号”受到水的浮力是F浮=G排=1.7×108N
(3)解:由题意知:P=12000kW=1.2×107W
根据P=W/t=Fs/t=Fv可得,泥泵对排泥管内泥浆的推力为F=P/v=1.2×107W/2m/s=6×106N
【解析】【分析】(1)根据液体密度和深度计算液体压强大小;(2)根据物体排开液体的质量计算重力,再计算浮力大小;(3)根据功率和速度,可以计算拉力大小。
四、实验探究
1、【答案】(1)右
(2)钩码
(3)不可靠;仅凭一次实验得出结论,具有偶然性
【解析】【解答】(1)杠杆右边高,应将杠杆平衡螺母向右端调节,使杠杆在水平位置平衡。
(2)杠杆右边高,说明左边力和力臂乘积大,为使杠杆仍在水平位置恢复平衡,可将钩码右移。
(3)仅凭一次实验得出结论,具有偶然性,所以要多次实验找到普遍规律,因此她的结论不可靠。
【分析】(1)测量前要调节平衡螺母使杠杆平衡。
(2)开始实验后不能调节平衡螺母。
(3) 要多次实验找到普遍规律,避免偶然性。
2、【答案】(1)右
(2)3;顺时针旋转
(3)3
【解析】【解答】(1)静止时左低右高,则杠杆左边重,需要将平衡螺母往右调。
(2)根据杠杆平衡原理
可知A离支点距离为3格,悬挂4个钩码,B离支点的距离为4格,则应该挂3个钩码。两边同时增加钩码时,杠杆不平衡,会顺时针旋转。
(3)根据杠杆平衡原理
A离支点距离为3格,悬挂4个钩码,C离支点的距离为4格,且力的方向与水平方向成 角,则
【分析】(1)调节杠杆平衡,杠杆的哪一端高就把平衡螺母往哪端调,最后使杠杆在水平位置平衡;
(2)结合杠杆的动力、动力臂、阻力、阻力臂大小,求解两侧动力、动力臂的乘积和阻力、阻力臂的乘积,谁的乘积大就往哪边偏;
(3)杠杆处于平衡状态,结合动力、动力臂、阻力、阻力臂,利用杠杆的平衡条件分析求解即可。