2021-2022学年度强化训练北师大版物理八年级下册第九章 机械和功专项练习试题(含详解)
文档属性
| 名称 | 2021-2022学年度强化训练北师大版物理八年级下册第九章 机械和功专项练习试题(含详解) |
|
|
| 格式 | zip | ||
| 文件大小 | 230.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-05-11 00:00:00 | ||
图片预览

文档简介
北师大版物理八年级下册第九章 机械和功专项练习
考试时间:90分钟;命题人:物理教研组
考生注意:
1、本卷分第I卷(选择题)和第Ⅱ卷(非选择题)两部分,满分100分,考试时间90分钟
2、答卷前,考生务必用0.5毫米黑色签字笔将自己的姓名、班级填写在试卷规定位置上
3、答案必须写在试卷各个题目指定区域内相应的位置,如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带,不按以上要求作答的答案无效。
第I卷(选择题 30分)
一、单选题(10小题,每小题3分,共计30分)
1、体重相同的甲、乙两同学,同时开始登山,甲同学先到山顶,乙同学后到山顶,则( )
A.甲同学比乙同学做的功多,甲同学比乙同学的功率大
B.甲同学比乙同学做的功少,甲同学比乙同学的功率大
C.甲同学与乙同学做的功相等,甲同学比乙同学的功率大
D.甲同学与乙同学做的功相等,他们的功率也相等
2、关于物理课上的一些情景,下列说法正确的是( )
A.老师用粉笔写板书时,粉笔断了,说明力可以改变物体的运动状态
B.学生用签字笔记笔记时,签字笔是省力杠杆
C.风吹动书翻页,是因为流体流速大的地方压强大
D.用橡皮蹭掉画错的图时,橡皮与纸之间的摩擦是滑动摩擦
3、用一个动滑轮和一个定滑轮组成滑轮组甲和乙,分别匀速提升同一重物时,滑轮组甲和乙的机械效率分别为80%和75%,不计绳重和摩擦,滑轮组甲和乙中的动滑轮重力之比为( )
A.4:3 B.3:4 C.5:4 D.4:5
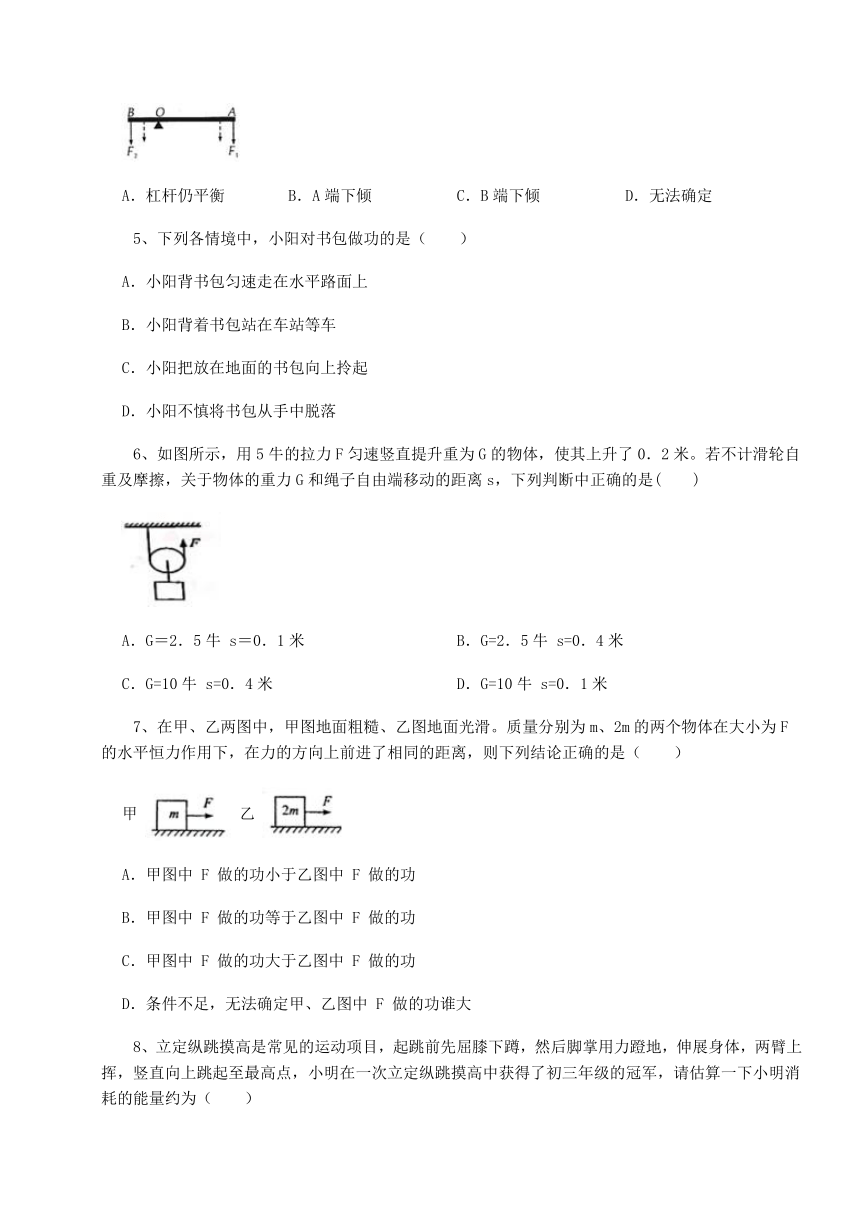
4、如图所示的杠杆平衡,若F1、F2的大小和方向均不变,它们的作用点同时向支点0移动相同的距离,则( )
A.杠杆仍平衡 B.A端下倾 C.B端下倾 D.无法确定
5、下列各情境中,小阳对书包做功的是( )
A.小阳背书包匀速走在水平路面上
B.小阳背着书包站在车站等车
C.小阳把放在地面的书包向上拎起
D.小阳不慎将书包从手中脱落
6、如图所示,用5牛的拉力F匀速竖直提升重为G的物体,使其上升了0.2米。若不计滑轮自重及摩擦,关于物体的重力G和绳子自由端移动的距离s,下列判断中正确的是( )
A.G=2.5牛 s=0.1米 B.G=2.5牛 s=0.4米
C.G=10牛 s=0.4米 D.G=10牛 s=0.1米
7、在甲、乙两图中,甲图地面粗糙、乙图地面光滑。质量分别为m、2m的两个物体在大小为F的水平恒力作用下,在力的方向上前进了相同的距离,则下列结论正确的是( )
甲 乙
A.甲图中 F 做的功小于乙图中 F 做的功
B.甲图中 F 做的功等于乙图中 F 做的功
C.甲图中 F 做的功大于乙图中 F 做的功
D.条件不足,无法确定甲、乙图中 F 做的功谁大
8、立定纵跳摸高是常见的运动项目,起跳前先屈膝下蹲,然后脚掌用力蹬地,伸展身体,两臂上挥,竖直向上跳起至最高点,小明在一次立定纵跳摸高中获得了初三年级的冠军,请估算一下小明消耗的能量约为( )
A.50J B.5×102J C.5×103J D.5×104J
9、如图所示,弹簧测力计和细线的重力及一切摩擦均不计,物重G=5N,则弹簧测力计A和B的示数分别为( )
A.5N,0N B.0N,5N C.5N,5N D.5N,10N
10、用如图所示的滑轮组匀速竖直提升物体,不计一切摩擦和绳重。下列判断正确的是( )
A.该滑轮组绳自由端拉力F的大小一定等于所提物体重力的三分之一
B.用该滑轮组提升不同的物体,物体越重,其机械效率越大
C.用该滑轮组分别提升水面下和水面上的同一物体,其机械效率相等
D.其他条件不变,仅将滑轮组中的动滑轮重力变大,其机械效率变大
第Ⅱ卷(非选择题 70分)
二、填空题(5小题,每小题5分,共计25分)
1、将如图1所示的钥匙插入锁孔转动开锁时,钥匙就相当于一个 (选填斜面或轮轴)。如图2,用滑轮拉着一重为40 N的物体向上做匀速直线运动,该滑轮为 滑轮,如果不计滑轮重及细绳与滑轮间的摩擦,则拉力F为 N。
2、研究表明,使用任何机械都 (选填“能”或“不能”)省功,起重机吊着重物在空中水平移动了50m,此过程起重机对重物 (选填“做了”或“没做”)功。
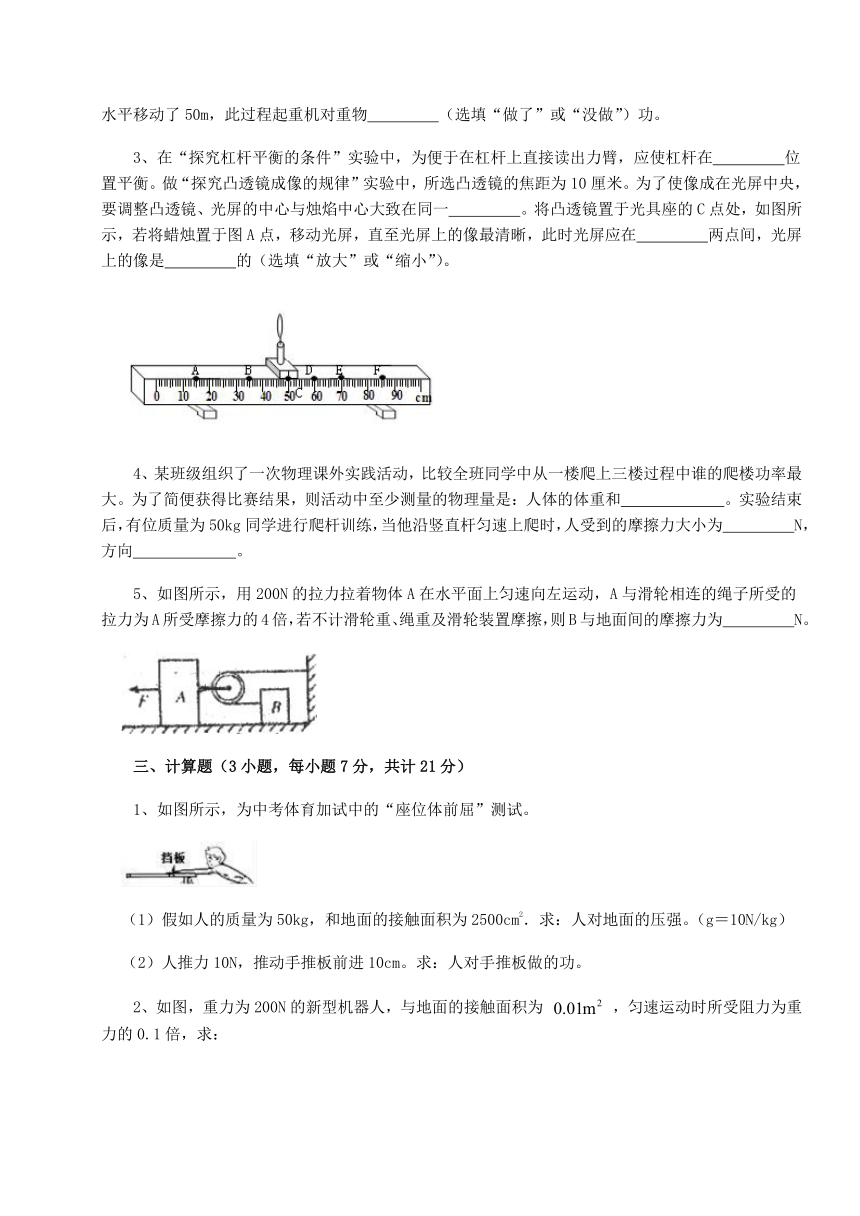
3、在“探究杠杆平衡的条件”实验中,为便于在杠杆上直接读出力臂,应使杠杆在 位置平衡。做“探究凸透镜成像的规律”实验中,所选凸透镜的焦距为10厘米。为了使像成在光屏中央,要调整凸透镜、光屏的中心与烛焰中心大致在同一 。将凸透镜置于光具座的C点处,如图所示,若将蜡烛置于图A点,移动光屏,直至光屏上的像最清晰,此时光屏应在 两点间,光屏上的像是 的(选填“放大”或“缩小”)。
4、某班级组织了一次物理课外实践活动,比较全班同学中从一楼爬上三楼过程中谁的爬楼功率最大。为了简便获得比赛结果,则活动中至少测量的物理量是:人体的体重和 。实验结束后,有位质量为50kg同学进行爬杆训练,当他沿竖直杆匀速上爬时,人受到的摩擦力大小为 N,方向 。
5、如图所示,用200N的拉力拉着物体A在水平面上匀速向左运动,A与滑轮相连的绳子所受的拉力为A所受摩擦力的4倍,若不计滑轮重、绳重及滑轮装置摩擦,则B与地面间的摩擦力为 N。
三、计算题(3小题,每小题7分,共计21分)
1、如图所示,为中考体育加试中的“座位体前屈”测试。
(1)假如人的质量为50kg,和地面的接触面积为2500cm2.求:人对地面的压强。(g=10N/kg)
(2)人推力10N,推动手推板前进10cm。求:人对手推板做的功。
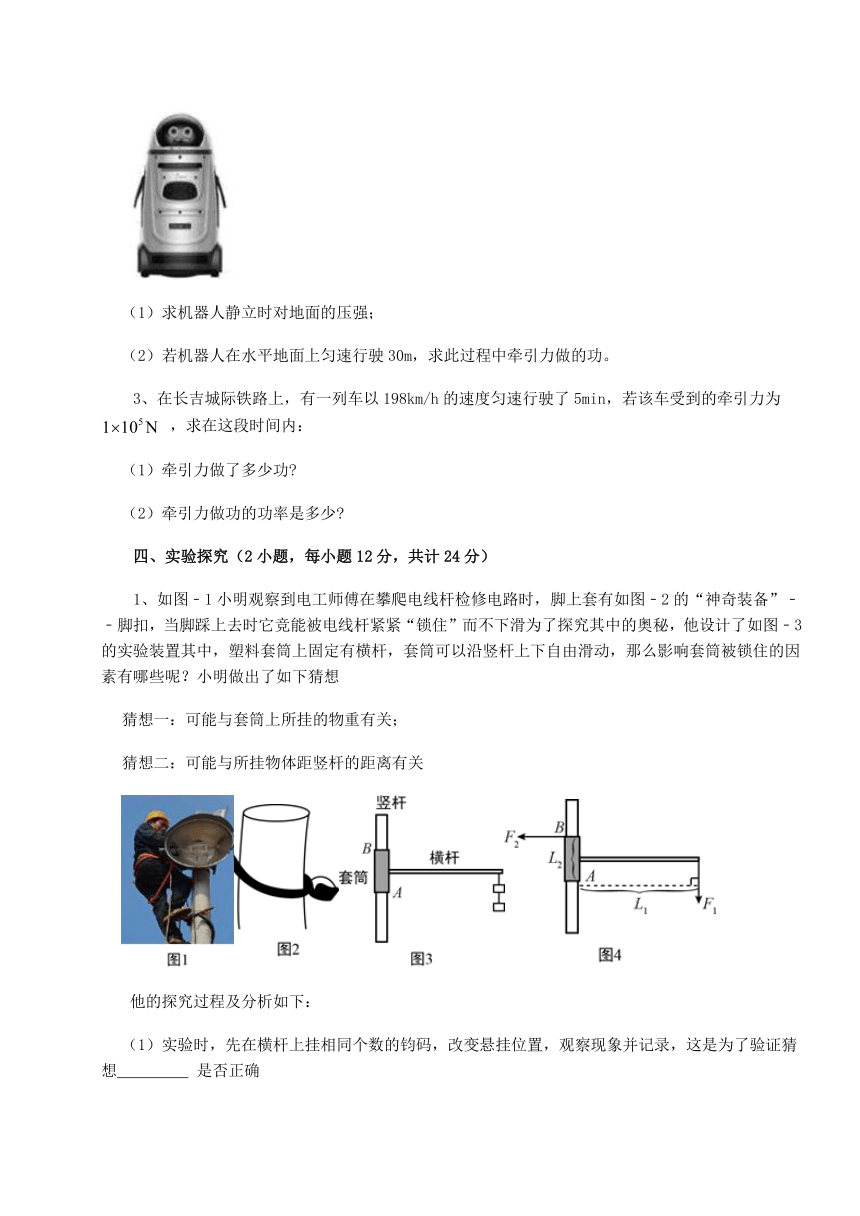
2、如图,重力为200N的新型机器人,与地面的接触面积为 ,匀速运动时所受阻力为重力的0.1倍,求:
(1)求机器人静立时对地面的压强;
(2)若机器人在水平地面上匀速行驶30m,求此过程中牵引力做的功。
3、在长吉城际铁路上,有一列车以198km/h的速度匀速行驶了5min,若该车受到的牵引力为 ,求在这段时间内:
(1)牵引力做了多少功
(2)牵引力做功的功率是多少
四、实验探究(2小题,每小题12分,共计24分)
1、如图﹣1小明观察到电工师傅在攀爬电线杆检修电路时,脚上套有如图﹣2的“神奇装备”﹣﹣脚扣,当脚踩上去时它竞能被电线杆紧紧“锁住”而不下滑为了探究其中的奥秘,他设计了如图﹣3的实验装置其中,塑料套筒上固定有横杆,套筒可以沿竖杆上下自由滑动,那么影响套筒被锁住的因素有哪些呢?小明做出了如下猜想
猜想一:可能与套筒上所挂的物重有关;
猜想二:可能与所挂物体距竖杆的距离有关
他的探究过程及分析如下:
(1)实验时,先在横杆上挂相同个数的钧码,改变悬挂位置,观察现象并记录,这是为了验证猜想 是否正确
(2)改变钩码个数,移动悬挂位置,分别记录三次套筒被锁住时钩码离竖杆的最小距离实验现象及数据如表
实验次数 1 2 3 4 5 6 7
钩码个数 4 4 4 4 3 2 1
钩码距竖杆距离/cm 5 8 13 15 9 6 5
实验现象 快速滑落 慢慢滑落 刚好滑落 紧紧锁住 刚好锁住 刚好锁住 刚好锁住
由前四次实验可知:当横杆上挂相同重物时,重物距竖杆越 ,越容易被锁住,分析第5、6、7次实验数据发现,横杆上所挂的物重越小,被锁住的最小距离越 ,验证了猜想是 正确的
(3)小明结合所学知识对其中的道理进行了如下分析:套筒及横杆相当于一个杠杆,如图﹣4,当套筒被锁住时,A为支点,L1、L2为动力臂和阻力臂,根据 条件,当F1和L2一定时,L1越大,套筒上B点受到竖杆的支持力F2就越大,因为物体间力的作用是相互的,所以套筒对竖杆的压力也越大,从而使竖杆给套筒 的越大,这个力的方向是 最终可阻碍套下滑,从而将它锁住.
(4)你认为影响套筒被锁住的因素还有 (写一条即可)
2、小红探究“杠杆的平衡条件”时,每个钩码质量均为50g.
(1)如图甲所示,此时杠杆静止,它 平衡是状态(填 “是”或“不是”)。为使杠杆在水平位置平衡,应将杠杆两端的平衡螺母向 端调节(选填“A”或“B“)。
(2)使杠杆水平平衡的目的是 ;支点支在 杠杆中央的目的是 。
(3)对于甲图,若在距支点左侧第2格处挂三个钩砝,为 使杠杆水平平衡,则需在距支点右侧第3格处挂 个钩砝;若此时两端再同时减去一个钩砝,则杠杆 水平平衡。(填“能”或“不能”)
(4)如图乙所示,杠杆水平平衡后,在杠杆的C点挂4个钩码,在D点用弹簧测力计竖直向上拉杠杆,使杠杆仍保持水平平衡,则弹簧测力计的示数为 N。若拉力的方向不是竖直的,则测量值将 (填 “偏大”、“偏小“或“不变”)。
-参考答案-
一、单选题
1、【答案】C
【解析】【解答】AB.由于甲乙二同学体重相等,且登山的高度也相等,由W=Gh知道,二人做的功相同,
AB不符合题意;
CD.由于二人做的功相同,而甲所用时间少,由 知道,甲的功率大,C符合题意,D不符合题意。
故答案为:C
【分析】求解外力做功,利用外力大小乘以位移在力的方向上移动的距离即可,即W=Fs;利用外力做的功除以做功需要的时间即为功率。
2、【答案】D
【解析】【解答】A.老师用粉笔写板书时,粉笔断了,说明力可以改变物体的形状,故A错误;
B.学生用签字笔记笔记时,大拇指接触的位置相当于支点,阻力作用在笔尖上,而动力作用在食指上,此时动力臂小于阻力臂,为费力杠杆,故B错误;
C.风吹动书翻页,是因为流体流速大的地方压强小,故C错误;
D.用橡皮蹭掉画错的图时,橡皮与纸之间的摩擦是滑动摩擦,故D正确。
故选D。
【分析】(1)运动状态的改变:静止变运动,运动变静止、运动方向改变和速度大小改变;
(2)比较动力臂和阻力臂的大小,确定杠杆的分类;
(3)根据流体压强和流速的关系判断;
(4)一个物体在另一物体上滑动时产生的摩擦叫滑动摩擦。
3、【答案】B
【解析】【解答】不计绳重及摩擦,滑轮组的机械效率:η= ,用一个动滑轮和一个定滑轮组成滑轮组甲和乙,分别匀速提升同一重物时,滑轮组甲和乙的机械效率分别为80%和75%,则可知物重相同(都为G),设两动滑轮重分别为G甲动、G乙动,则有:η甲= =80%,G甲动= G,η乙= =75%,G乙动= G,所以,甲乙动滑轮重力之比:G甲动:G乙动= G: G=3:4。
故答案为:B
【分析】不计绳重及摩擦,滑轮组的机械效率η= ,据此结合题意进行计算即可
4、【答案】B
【解析】【解答】原来平衡时,由杠杆的平衡条件可得F1 AO=F2 BO,因为AO>BO,所以F1<F2;设向支点O移动相同的距离为L,则A端力与力臂的乘积为:F1(AO﹣L)=F1AO﹣F1L,B端力与力臂的乘积为:F2(BO﹣L)=F2BO﹣F2L,因F1<F2,则F1L<F2L,所以F1(AO﹣L)>F2(BO﹣L),则杠杆的A端向下倾斜;
故答案为:B。
【分析】结合图像,利用杠杆的平衡条件可得F1 AO=F2 BO,据此进一步分析解答.
5、【答案】C
【解析】【解答】A.小阳背着书包匀速走在水平路面上,力的方向是竖直向上的,运动的方向为水平方向,不是在力的方向上通过距离,对书包不做功,A不符合题意;
B.小阳背着书包站在车站等车,有力,但没有通过距离,不做功,B不符合题意;
C.小阳把放在地面的书包向上拎起,书包在小阳的力的方向上通过了距离,做功,C符合题意;
D.小阳不慎将书包从手中脱落,书包在重力的方向上通过了距离,重力做功,但小阳没有施加力,不做功,D不符合题意。
故答案为:C。
【分析】功的两个必要因素:一是作用在物体上的力;二 是物体在力的方向上通过的距离。
6、【答案】C
【解析】【解答】根据图像,是动滑轮的图像,若不计滑轮重力和摩擦力,动滑轮上的拉力是物体重力的一半,则物体重力为G=2×5N=10N,使用动滑轮可以省力,但费距离,则s=2×0.2m=0.4m, C符合题意。
故答案为:C.
【分析】使用动滑轮时,可以省力一半,但费2倍距离。
7、【答案】B
【解析】【解答】由题意可知,两个物体在大小为F的恒力作用下,在力的方向上前进了相同的距离s,根据W=Fs可知,甲图中F做的功等于乙图中F做的功。
故答案为:B。
【分析】根据W=Fs可得解.
8、【答案】B
【解析】【解答】人在跳起时消耗的能量可以用做功的多少计算,中学生的重力约500N,冠军跳起的高度约1m,做功为W=Gh=500N×1m=500J,B符合题意。
故答案为:B.
【分析】根据力和距离的乘积计算功的大小,也是消耗能量的多少。
9、【答案】C
【解析】【解答】解:因为物重G=5N,所以A弹簧测力计受到向右5N的拉力,静止,向左受的拉力也是5N,示数也为5N;
同理,B测力计两端受的力都是5N,示数也为5N。
故答案为:C。
【分析】根据物体处于静止状态,得出物体受平衡力的作用,从而得出测力计的示数,同时涉及到了定滑轮的特点.
10、【答案】B
【解析】【解答】A、由图知,n=3,不计一切摩擦和绳重,拉力F= (G+G轮)> G,所以拉力F的大小大于所提物体重力的三分之一,A不符合题意;
B、不计一切摩擦和绳重,用该滑轮组提升不同的物体,则η= = = = ,可见提升的物体越重,其机械效率越大,B符合题意;
C、用该滑轮组分别提升水面下和水面上的同一物体,由于物体在水中受到浮力,就好比用滑轮组提升的物体重力变小,所以其机械效率不相等,C不符合题意;
D、仅将滑轮组中的动滑轮重力变大,将同一物体提升相同的高度(其他条件相同),有用功相同,由W额=G动h可知额外功增大,则总功增大,有用功与总功的比值减小,机械效率减小,D不符合题意。
故答案为:B。
【分析】不计一切摩擦和绳重,拉力F= (G+G轮);利用η= = = = 可知提升的物体越重,其机械效率越大.
二、填空题
1、【答案】轮轴;动;20
【解析】【解答】钥匙插入锁孔转动开锁时,钥匙绕锁孔的中心转动,相当于一个轮轴,动力施加在轮上。
如图,滑轮随物体一起向上运动,所以是动滑轮。
如果不计滑轮重及细绳与滑轮间的摩擦,则拉力为
【分析】中心转轴移动的为动滑轮,动滑轮可以省力但不能改变力的方向,其中拉力等于物体重力的一半,但是拉力移动的距离为重物移动距离的两倍。
2、【答案】不能;没做
【解析】【解答】任何机械要么省力要么省距离,起重机对重物的拉力是竖直的,物体在竖直方向上没有距离,故没有做功。
故答案为:不能;没做。
【分析】任何机械要么省力要么省距离,都不能省功;利用做功的两要素可以解决这问题。
3、【答案】水平;高度;DE;缩小
【解析】【解答】为了方便在杠杆上直接读出力臂大小,实验时应使杠杆在水平位置平衡。实验前应先调节光具座上烛焰、透镜和光屏三者的中心在同一高度,这样可使像成在光屏的中央。A点与凸透镜的距离为
已知焦距为10cm,此时满足物距大于二倍焦距的条件,此时成倒立缩小的实像,像距在一倍和二倍焦距之间,即凸透镜右侧10~20cm处,故像在DE之间。
【分析】杠杆在水平位置平衡,方便在杠杆上直接读出力臂大小;探究凸透镜成像规律时,调节光具座上烛焰、透镜和光屏三者的中心在同一高度,像能成在光屏的中央;当物体在凸透镜的二倍焦距以外时,像在凸透镜的一倍焦距和二倍焦距,像是缩小的实像。
4、【答案】爬楼时间;500;竖直向上
【解析】【解答】根据功率的计算公式,要比较功率的大小,所做的功及做功的时间,在高度相同时,需要测量出人体的质量及爬楼时间。
沿竖直杆匀速上爬时,在竖直方向上,人受二力平衡,重力与摩擦力是一对平衡力,所以摩擦力的大小为
方向与重力方向相反,即竖直向上。
【分析】测量功率时,需要测量时间和做功多少;根据物体的质量计算重力。
5、【答案】80
【解析】【解答】根据题意知道,用200N拉物体在水平面上匀速向左运动,设 F1为绳子拉物体A的力,F2为绳子拉物体B的力,以A为研究对象,则由平衡条件知F=f+F1
又因为F1 =4f
所以F=f+F1 =f+4f=5f=200N
故f=40N
则F1 =4f=4×40N=160N
因为是同一根绳,所以B受拉力
由于B匀速运动,所以B与地面间的摩擦力等于B受到的拉力为80N。
【分析】动滑轮可以省一半力,根据物体受到的力,计算合力。
三、计算题
1、【答案】(1)解:人对地面的压强:
p= = = = =2000Pa
答:人对地面的压强为2000Pa
(2)解:由题知,人的推力10N,推动手推板前进10cm,
则人对手推板做的功:
W=F推s═10N×10×10﹣2m=1J
答:人对手推板做的功为1J
【解析】【分析】(1)利用p= = = 求得 人对地面的压强 .
(2)利用 W=F推s 求得 人对手推板做的功 .
2、【答案】(1)解:机器人静止时对水平地面的压力
机器人静止时对水平地面的压强
答:机器人静立时对地面的压强2×104Pa;
(2)解:匀速时牵引力
牵引力做功
答:若机器人在水平地面上匀速行驶30m,此过程中牵引力做的功600J。
【解析】【分析】(1)水平面上受到的压力等于物体的重力,利用压力和受力面积的比值计算压强;
(2)根据物体匀速直线运动时物体受到平衡力,结合二力平衡的摩擦力计算拉力;利用拉力和距离的乘积计算做功多少。
3、【答案】(1)解:列车的速度v=198km/h=55m/s
牵引力做的功W=Fs=Fvt= ×55m/s×300s=1.65×109J
答:牵引力做功1.65×109J;
(2)牵引力做功的功率
答:牵引力做功的功率是5.5×106W。
【解析】【分析】求解外力做功,利用外力大小乘以位移在力的方向上移动的距离即可,即W=Fs;利用外力做的功除以做功需要的时间即为功率。
四、实验探究
1、【答案】(1)二
(2)远;小;一
(3)杠杆的平衡;摩擦力;竖直向上
(4)电线杆的粗糙程度
【解析】【解答】(1)实验时,先在横杆上挂相同个数的钧码,改变悬挂位置,观察现象并记录,这是为了验证猜想二是否正确;
(2)由前四次实验可知:钩码数量相同,当横杆上挂相同重物时,重物距竖杆越远,越容易被锁住,分析第5、6、7次实验数据发现,横杆上所挂的物重越小,被锁住的最小距离越小,验证了猜想是一正确的;
(3)小明结合所学知识对其中的道理进行了如下分析:套简及横杆相当于一个杠杆,如图﹣4,当套筒被锁住时,A为支点,L1、L2为动力臂和阻力臂,根据杠杆的平衡条件:F1×L1=F2×L2;故F2= ×F1,可知当F1和L2一定时,L1越大,套筒上B点受到竖杆的支持力F2就越大,因为物体间力的作用是相互的,所以套筒对竖杆的压力也越大,根据影响滑动摩擦力大小的因素,从而使竖杆给套筒的摩擦力越大,因物体有向下运动的趋势,故这个力的方向是竖直向上,最终可阻碍套下滑,从而将它锁住;
(4)根据影响滑动摩擦力大小的因素,影响套筒被锁住的因素还有电线杆的粗糙程度.
【分析】(1)改变物体在杠杆上的位置,可以探究力和距离的关系;(2)力到支点越远,力的作用效果越明显;(3)根据杠杆平衡条件,分析力臂和力间的关系;向上的摩擦力阻碍物体下落;(4)影响摩擦力的因素还有接触面的粗糙程度。
2、【答案】(1)是;B
(2)便于读或测量力臂长;避免杠杆自重对实验的影响
(3)二;不能
(4)0.8;偏大
【解析】【解答】(1)静止状态就是平衡状态,为了使它在水平位置平衡,根据哪边高往哪边调,可以知道右边高,所以往右边调即B端调。
(2)杠杆在水平位置平衡是便于测量力臂,支点在杠杆中央是避免杠杆自重对实验的影响。
(3)根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,左侧3个钩码,两个格,所以右侧三个格,挂两个钩码,若此时减一个钩码,则左侧减去1个钩码×2个格,右侧减去1个钩码×三个格,所以不能水平平衡了。
(4)4个钩码重力是2N,根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,动力臂是5格,阻力臂是2格,所以弹簧测力计拉力是0.8N。若拉力方向改变,则力臂变小,力变大。
【分析】平衡状态包括静止状态,根据哪边高往哪边调,可以使它在水平位置平衡,便于测量力臂,而支点在杠杆中央是避免杠杆自重对实验的影响。根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,比较分析平衡与否,计算力或力臂,分析力的变化情况。
考试时间:90分钟;命题人:物理教研组
考生注意:
1、本卷分第I卷(选择题)和第Ⅱ卷(非选择题)两部分,满分100分,考试时间90分钟
2、答卷前,考生务必用0.5毫米黑色签字笔将自己的姓名、班级填写在试卷规定位置上
3、答案必须写在试卷各个题目指定区域内相应的位置,如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带,不按以上要求作答的答案无效。
第I卷(选择题 30分)
一、单选题(10小题,每小题3分,共计30分)
1、体重相同的甲、乙两同学,同时开始登山,甲同学先到山顶,乙同学后到山顶,则( )
A.甲同学比乙同学做的功多,甲同学比乙同学的功率大
B.甲同学比乙同学做的功少,甲同学比乙同学的功率大
C.甲同学与乙同学做的功相等,甲同学比乙同学的功率大
D.甲同学与乙同学做的功相等,他们的功率也相等
2、关于物理课上的一些情景,下列说法正确的是( )
A.老师用粉笔写板书时,粉笔断了,说明力可以改变物体的运动状态
B.学生用签字笔记笔记时,签字笔是省力杠杆
C.风吹动书翻页,是因为流体流速大的地方压强大
D.用橡皮蹭掉画错的图时,橡皮与纸之间的摩擦是滑动摩擦
3、用一个动滑轮和一个定滑轮组成滑轮组甲和乙,分别匀速提升同一重物时,滑轮组甲和乙的机械效率分别为80%和75%,不计绳重和摩擦,滑轮组甲和乙中的动滑轮重力之比为( )
A.4:3 B.3:4 C.5:4 D.4:5
4、如图所示的杠杆平衡,若F1、F2的大小和方向均不变,它们的作用点同时向支点0移动相同的距离,则( )
A.杠杆仍平衡 B.A端下倾 C.B端下倾 D.无法确定
5、下列各情境中,小阳对书包做功的是( )
A.小阳背书包匀速走在水平路面上
B.小阳背着书包站在车站等车
C.小阳把放在地面的书包向上拎起
D.小阳不慎将书包从手中脱落
6、如图所示,用5牛的拉力F匀速竖直提升重为G的物体,使其上升了0.2米。若不计滑轮自重及摩擦,关于物体的重力G和绳子自由端移动的距离s,下列判断中正确的是( )
A.G=2.5牛 s=0.1米 B.G=2.5牛 s=0.4米
C.G=10牛 s=0.4米 D.G=10牛 s=0.1米
7、在甲、乙两图中,甲图地面粗糙、乙图地面光滑。质量分别为m、2m的两个物体在大小为F的水平恒力作用下,在力的方向上前进了相同的距离,则下列结论正确的是( )
甲 乙
A.甲图中 F 做的功小于乙图中 F 做的功
B.甲图中 F 做的功等于乙图中 F 做的功
C.甲图中 F 做的功大于乙图中 F 做的功
D.条件不足,无法确定甲、乙图中 F 做的功谁大
8、立定纵跳摸高是常见的运动项目,起跳前先屈膝下蹲,然后脚掌用力蹬地,伸展身体,两臂上挥,竖直向上跳起至最高点,小明在一次立定纵跳摸高中获得了初三年级的冠军,请估算一下小明消耗的能量约为( )
A.50J B.5×102J C.5×103J D.5×104J
9、如图所示,弹簧测力计和细线的重力及一切摩擦均不计,物重G=5N,则弹簧测力计A和B的示数分别为( )
A.5N,0N B.0N,5N C.5N,5N D.5N,10N
10、用如图所示的滑轮组匀速竖直提升物体,不计一切摩擦和绳重。下列判断正确的是( )
A.该滑轮组绳自由端拉力F的大小一定等于所提物体重力的三分之一
B.用该滑轮组提升不同的物体,物体越重,其机械效率越大
C.用该滑轮组分别提升水面下和水面上的同一物体,其机械效率相等
D.其他条件不变,仅将滑轮组中的动滑轮重力变大,其机械效率变大
第Ⅱ卷(非选择题 70分)
二、填空题(5小题,每小题5分,共计25分)
1、将如图1所示的钥匙插入锁孔转动开锁时,钥匙就相当于一个 (选填斜面或轮轴)。如图2,用滑轮拉着一重为40 N的物体向上做匀速直线运动,该滑轮为 滑轮,如果不计滑轮重及细绳与滑轮间的摩擦,则拉力F为 N。
2、研究表明,使用任何机械都 (选填“能”或“不能”)省功,起重机吊着重物在空中水平移动了50m,此过程起重机对重物 (选填“做了”或“没做”)功。
3、在“探究杠杆平衡的条件”实验中,为便于在杠杆上直接读出力臂,应使杠杆在 位置平衡。做“探究凸透镜成像的规律”实验中,所选凸透镜的焦距为10厘米。为了使像成在光屏中央,要调整凸透镜、光屏的中心与烛焰中心大致在同一 。将凸透镜置于光具座的C点处,如图所示,若将蜡烛置于图A点,移动光屏,直至光屏上的像最清晰,此时光屏应在 两点间,光屏上的像是 的(选填“放大”或“缩小”)。
4、某班级组织了一次物理课外实践活动,比较全班同学中从一楼爬上三楼过程中谁的爬楼功率最大。为了简便获得比赛结果,则活动中至少测量的物理量是:人体的体重和 。实验结束后,有位质量为50kg同学进行爬杆训练,当他沿竖直杆匀速上爬时,人受到的摩擦力大小为 N,方向 。
5、如图所示,用200N的拉力拉着物体A在水平面上匀速向左运动,A与滑轮相连的绳子所受的拉力为A所受摩擦力的4倍,若不计滑轮重、绳重及滑轮装置摩擦,则B与地面间的摩擦力为 N。
三、计算题(3小题,每小题7分,共计21分)
1、如图所示,为中考体育加试中的“座位体前屈”测试。
(1)假如人的质量为50kg,和地面的接触面积为2500cm2.求:人对地面的压强。(g=10N/kg)
(2)人推力10N,推动手推板前进10cm。求:人对手推板做的功。
2、如图,重力为200N的新型机器人,与地面的接触面积为 ,匀速运动时所受阻力为重力的0.1倍,求:
(1)求机器人静立时对地面的压强;
(2)若机器人在水平地面上匀速行驶30m,求此过程中牵引力做的功。
3、在长吉城际铁路上,有一列车以198km/h的速度匀速行驶了5min,若该车受到的牵引力为 ,求在这段时间内:
(1)牵引力做了多少功
(2)牵引力做功的功率是多少
四、实验探究(2小题,每小题12分,共计24分)
1、如图﹣1小明观察到电工师傅在攀爬电线杆检修电路时,脚上套有如图﹣2的“神奇装备”﹣﹣脚扣,当脚踩上去时它竞能被电线杆紧紧“锁住”而不下滑为了探究其中的奥秘,他设计了如图﹣3的实验装置其中,塑料套筒上固定有横杆,套筒可以沿竖杆上下自由滑动,那么影响套筒被锁住的因素有哪些呢?小明做出了如下猜想
猜想一:可能与套筒上所挂的物重有关;
猜想二:可能与所挂物体距竖杆的距离有关
他的探究过程及分析如下:
(1)实验时,先在横杆上挂相同个数的钧码,改变悬挂位置,观察现象并记录,这是为了验证猜想 是否正确
(2)改变钩码个数,移动悬挂位置,分别记录三次套筒被锁住时钩码离竖杆的最小距离实验现象及数据如表
实验次数 1 2 3 4 5 6 7
钩码个数 4 4 4 4 3 2 1
钩码距竖杆距离/cm 5 8 13 15 9 6 5
实验现象 快速滑落 慢慢滑落 刚好滑落 紧紧锁住 刚好锁住 刚好锁住 刚好锁住
由前四次实验可知:当横杆上挂相同重物时,重物距竖杆越 ,越容易被锁住,分析第5、6、7次实验数据发现,横杆上所挂的物重越小,被锁住的最小距离越 ,验证了猜想是 正确的
(3)小明结合所学知识对其中的道理进行了如下分析:套筒及横杆相当于一个杠杆,如图﹣4,当套筒被锁住时,A为支点,L1、L2为动力臂和阻力臂,根据 条件,当F1和L2一定时,L1越大,套筒上B点受到竖杆的支持力F2就越大,因为物体间力的作用是相互的,所以套筒对竖杆的压力也越大,从而使竖杆给套筒 的越大,这个力的方向是 最终可阻碍套下滑,从而将它锁住.
(4)你认为影响套筒被锁住的因素还有 (写一条即可)
2、小红探究“杠杆的平衡条件”时,每个钩码质量均为50g.
(1)如图甲所示,此时杠杆静止,它 平衡是状态(填 “是”或“不是”)。为使杠杆在水平位置平衡,应将杠杆两端的平衡螺母向 端调节(选填“A”或“B“)。
(2)使杠杆水平平衡的目的是 ;支点支在 杠杆中央的目的是 。
(3)对于甲图,若在距支点左侧第2格处挂三个钩砝,为 使杠杆水平平衡,则需在距支点右侧第3格处挂 个钩砝;若此时两端再同时减去一个钩砝,则杠杆 水平平衡。(填“能”或“不能”)
(4)如图乙所示,杠杆水平平衡后,在杠杆的C点挂4个钩码,在D点用弹簧测力计竖直向上拉杠杆,使杠杆仍保持水平平衡,则弹簧测力计的示数为 N。若拉力的方向不是竖直的,则测量值将 (填 “偏大”、“偏小“或“不变”)。
-参考答案-
一、单选题
1、【答案】C
【解析】【解答】AB.由于甲乙二同学体重相等,且登山的高度也相等,由W=Gh知道,二人做的功相同,
AB不符合题意;
CD.由于二人做的功相同,而甲所用时间少,由 知道,甲的功率大,C符合题意,D不符合题意。
故答案为:C
【分析】求解外力做功,利用外力大小乘以位移在力的方向上移动的距离即可,即W=Fs;利用外力做的功除以做功需要的时间即为功率。
2、【答案】D
【解析】【解答】A.老师用粉笔写板书时,粉笔断了,说明力可以改变物体的形状,故A错误;
B.学生用签字笔记笔记时,大拇指接触的位置相当于支点,阻力作用在笔尖上,而动力作用在食指上,此时动力臂小于阻力臂,为费力杠杆,故B错误;
C.风吹动书翻页,是因为流体流速大的地方压强小,故C错误;
D.用橡皮蹭掉画错的图时,橡皮与纸之间的摩擦是滑动摩擦,故D正确。
故选D。
【分析】(1)运动状态的改变:静止变运动,运动变静止、运动方向改变和速度大小改变;
(2)比较动力臂和阻力臂的大小,确定杠杆的分类;
(3)根据流体压强和流速的关系判断;
(4)一个物体在另一物体上滑动时产生的摩擦叫滑动摩擦。
3、【答案】B
【解析】【解答】不计绳重及摩擦,滑轮组的机械效率:η= ,用一个动滑轮和一个定滑轮组成滑轮组甲和乙,分别匀速提升同一重物时,滑轮组甲和乙的机械效率分别为80%和75%,则可知物重相同(都为G),设两动滑轮重分别为G甲动、G乙动,则有:η甲= =80%,G甲动= G,η乙= =75%,G乙动= G,所以,甲乙动滑轮重力之比:G甲动:G乙动= G: G=3:4。
故答案为:B
【分析】不计绳重及摩擦,滑轮组的机械效率η= ,据此结合题意进行计算即可
4、【答案】B
【解析】【解答】原来平衡时,由杠杆的平衡条件可得F1 AO=F2 BO,因为AO>BO,所以F1<F2;设向支点O移动相同的距离为L,则A端力与力臂的乘积为:F1(AO﹣L)=F1AO﹣F1L,B端力与力臂的乘积为:F2(BO﹣L)=F2BO﹣F2L,因F1<F2,则F1L<F2L,所以F1(AO﹣L)>F2(BO﹣L),则杠杆的A端向下倾斜;
故答案为:B。
【分析】结合图像,利用杠杆的平衡条件可得F1 AO=F2 BO,据此进一步分析解答.
5、【答案】C
【解析】【解答】A.小阳背着书包匀速走在水平路面上,力的方向是竖直向上的,运动的方向为水平方向,不是在力的方向上通过距离,对书包不做功,A不符合题意;
B.小阳背着书包站在车站等车,有力,但没有通过距离,不做功,B不符合题意;
C.小阳把放在地面的书包向上拎起,书包在小阳的力的方向上通过了距离,做功,C符合题意;
D.小阳不慎将书包从手中脱落,书包在重力的方向上通过了距离,重力做功,但小阳没有施加力,不做功,D不符合题意。
故答案为:C。
【分析】功的两个必要因素:一是作用在物体上的力;二 是物体在力的方向上通过的距离。
6、【答案】C
【解析】【解答】根据图像,是动滑轮的图像,若不计滑轮重力和摩擦力,动滑轮上的拉力是物体重力的一半,则物体重力为G=2×5N=10N,使用动滑轮可以省力,但费距离,则s=2×0.2m=0.4m, C符合题意。
故答案为:C.
【分析】使用动滑轮时,可以省力一半,但费2倍距离。
7、【答案】B
【解析】【解答】由题意可知,两个物体在大小为F的恒力作用下,在力的方向上前进了相同的距离s,根据W=Fs可知,甲图中F做的功等于乙图中F做的功。
故答案为:B。
【分析】根据W=Fs可得解.
8、【答案】B
【解析】【解答】人在跳起时消耗的能量可以用做功的多少计算,中学生的重力约500N,冠军跳起的高度约1m,做功为W=Gh=500N×1m=500J,B符合题意。
故答案为:B.
【分析】根据力和距离的乘积计算功的大小,也是消耗能量的多少。
9、【答案】C
【解析】【解答】解:因为物重G=5N,所以A弹簧测力计受到向右5N的拉力,静止,向左受的拉力也是5N,示数也为5N;
同理,B测力计两端受的力都是5N,示数也为5N。
故答案为:C。
【分析】根据物体处于静止状态,得出物体受平衡力的作用,从而得出测力计的示数,同时涉及到了定滑轮的特点.
10、【答案】B
【解析】【解答】A、由图知,n=3,不计一切摩擦和绳重,拉力F= (G+G轮)> G,所以拉力F的大小大于所提物体重力的三分之一,A不符合题意;
B、不计一切摩擦和绳重,用该滑轮组提升不同的物体,则η= = = = ,可见提升的物体越重,其机械效率越大,B符合题意;
C、用该滑轮组分别提升水面下和水面上的同一物体,由于物体在水中受到浮力,就好比用滑轮组提升的物体重力变小,所以其机械效率不相等,C不符合题意;
D、仅将滑轮组中的动滑轮重力变大,将同一物体提升相同的高度(其他条件相同),有用功相同,由W额=G动h可知额外功增大,则总功增大,有用功与总功的比值减小,机械效率减小,D不符合题意。
故答案为:B。
【分析】不计一切摩擦和绳重,拉力F= (G+G轮);利用η= = = = 可知提升的物体越重,其机械效率越大.
二、填空题
1、【答案】轮轴;动;20
【解析】【解答】钥匙插入锁孔转动开锁时,钥匙绕锁孔的中心转动,相当于一个轮轴,动力施加在轮上。
如图,滑轮随物体一起向上运动,所以是动滑轮。
如果不计滑轮重及细绳与滑轮间的摩擦,则拉力为
【分析】中心转轴移动的为动滑轮,动滑轮可以省力但不能改变力的方向,其中拉力等于物体重力的一半,但是拉力移动的距离为重物移动距离的两倍。
2、【答案】不能;没做
【解析】【解答】任何机械要么省力要么省距离,起重机对重物的拉力是竖直的,物体在竖直方向上没有距离,故没有做功。
故答案为:不能;没做。
【分析】任何机械要么省力要么省距离,都不能省功;利用做功的两要素可以解决这问题。
3、【答案】水平;高度;DE;缩小
【解析】【解答】为了方便在杠杆上直接读出力臂大小,实验时应使杠杆在水平位置平衡。实验前应先调节光具座上烛焰、透镜和光屏三者的中心在同一高度,这样可使像成在光屏的中央。A点与凸透镜的距离为
已知焦距为10cm,此时满足物距大于二倍焦距的条件,此时成倒立缩小的实像,像距在一倍和二倍焦距之间,即凸透镜右侧10~20cm处,故像在DE之间。
【分析】杠杆在水平位置平衡,方便在杠杆上直接读出力臂大小;探究凸透镜成像规律时,调节光具座上烛焰、透镜和光屏三者的中心在同一高度,像能成在光屏的中央;当物体在凸透镜的二倍焦距以外时,像在凸透镜的一倍焦距和二倍焦距,像是缩小的实像。
4、【答案】爬楼时间;500;竖直向上
【解析】【解答】根据功率的计算公式,要比较功率的大小,所做的功及做功的时间,在高度相同时,需要测量出人体的质量及爬楼时间。
沿竖直杆匀速上爬时,在竖直方向上,人受二力平衡,重力与摩擦力是一对平衡力,所以摩擦力的大小为
方向与重力方向相反,即竖直向上。
【分析】测量功率时,需要测量时间和做功多少;根据物体的质量计算重力。
5、【答案】80
【解析】【解答】根据题意知道,用200N拉物体在水平面上匀速向左运动,设 F1为绳子拉物体A的力,F2为绳子拉物体B的力,以A为研究对象,则由平衡条件知F=f+F1
又因为F1 =4f
所以F=f+F1 =f+4f=5f=200N
故f=40N
则F1 =4f=4×40N=160N
因为是同一根绳,所以B受拉力
由于B匀速运动,所以B与地面间的摩擦力等于B受到的拉力为80N。
【分析】动滑轮可以省一半力,根据物体受到的力,计算合力。
三、计算题
1、【答案】(1)解:人对地面的压强:
p= = = = =2000Pa
答:人对地面的压强为2000Pa
(2)解:由题知,人的推力10N,推动手推板前进10cm,
则人对手推板做的功:
W=F推s═10N×10×10﹣2m=1J
答:人对手推板做的功为1J
【解析】【分析】(1)利用p= = = 求得 人对地面的压强 .
(2)利用 W=F推s 求得 人对手推板做的功 .
2、【答案】(1)解:机器人静止时对水平地面的压力
机器人静止时对水平地面的压强
答:机器人静立时对地面的压强2×104Pa;
(2)解:匀速时牵引力
牵引力做功
答:若机器人在水平地面上匀速行驶30m,此过程中牵引力做的功600J。
【解析】【分析】(1)水平面上受到的压力等于物体的重力,利用压力和受力面积的比值计算压强;
(2)根据物体匀速直线运动时物体受到平衡力,结合二力平衡的摩擦力计算拉力;利用拉力和距离的乘积计算做功多少。
3、【答案】(1)解:列车的速度v=198km/h=55m/s
牵引力做的功W=Fs=Fvt= ×55m/s×300s=1.65×109J
答:牵引力做功1.65×109J;
(2)牵引力做功的功率
答:牵引力做功的功率是5.5×106W。
【解析】【分析】求解外力做功,利用外力大小乘以位移在力的方向上移动的距离即可,即W=Fs;利用外力做的功除以做功需要的时间即为功率。
四、实验探究
1、【答案】(1)二
(2)远;小;一
(3)杠杆的平衡;摩擦力;竖直向上
(4)电线杆的粗糙程度
【解析】【解答】(1)实验时,先在横杆上挂相同个数的钧码,改变悬挂位置,观察现象并记录,这是为了验证猜想二是否正确;
(2)由前四次实验可知:钩码数量相同,当横杆上挂相同重物时,重物距竖杆越远,越容易被锁住,分析第5、6、7次实验数据发现,横杆上所挂的物重越小,被锁住的最小距离越小,验证了猜想是一正确的;
(3)小明结合所学知识对其中的道理进行了如下分析:套简及横杆相当于一个杠杆,如图﹣4,当套筒被锁住时,A为支点,L1、L2为动力臂和阻力臂,根据杠杆的平衡条件:F1×L1=F2×L2;故F2= ×F1,可知当F1和L2一定时,L1越大,套筒上B点受到竖杆的支持力F2就越大,因为物体间力的作用是相互的,所以套筒对竖杆的压力也越大,根据影响滑动摩擦力大小的因素,从而使竖杆给套筒的摩擦力越大,因物体有向下运动的趋势,故这个力的方向是竖直向上,最终可阻碍套下滑,从而将它锁住;
(4)根据影响滑动摩擦力大小的因素,影响套筒被锁住的因素还有电线杆的粗糙程度.
【分析】(1)改变物体在杠杆上的位置,可以探究力和距离的关系;(2)力到支点越远,力的作用效果越明显;(3)根据杠杆平衡条件,分析力臂和力间的关系;向上的摩擦力阻碍物体下落;(4)影响摩擦力的因素还有接触面的粗糙程度。
2、【答案】(1)是;B
(2)便于读或测量力臂长;避免杠杆自重对实验的影响
(3)二;不能
(4)0.8;偏大
【解析】【解答】(1)静止状态就是平衡状态,为了使它在水平位置平衡,根据哪边高往哪边调,可以知道右边高,所以往右边调即B端调。
(2)杠杆在水平位置平衡是便于测量力臂,支点在杠杆中央是避免杠杆自重对实验的影响。
(3)根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,左侧3个钩码,两个格,所以右侧三个格,挂两个钩码,若此时减一个钩码,则左侧减去1个钩码×2个格,右侧减去1个钩码×三个格,所以不能水平平衡了。
(4)4个钩码重力是2N,根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,动力臂是5格,阻力臂是2格,所以弹簧测力计拉力是0.8N。若拉力方向改变,则力臂变小,力变大。
【分析】平衡状态包括静止状态,根据哪边高往哪边调,可以使它在水平位置平衡,便于测量力臂,而支点在杠杆中央是避免杠杆自重对实验的影响。根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,比较分析平衡与否,计算力或力臂,分析力的变化情况。