9.1、杠杆 课件(共36张PPT)
图片预览



文档简介
(共36张PPT)
第九章 机械和功
§9.1 杠杆
情境导入
仔细观察下列几幅图,找出它们在使用中的共同特征.
1、定义:
它们有一个共同的特征:在力的作用下能绕着固定点O转动的硬棒就是杠杆.
一、认识杠杆
生活中的杠杆
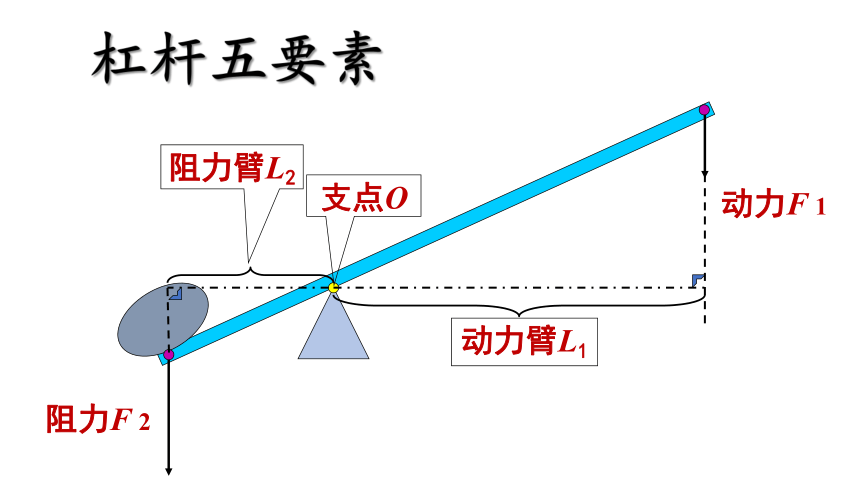
支点O
动力F 1
阻力F 2
动力臂L1
阻力臂L2
杠
杆
五
要
素
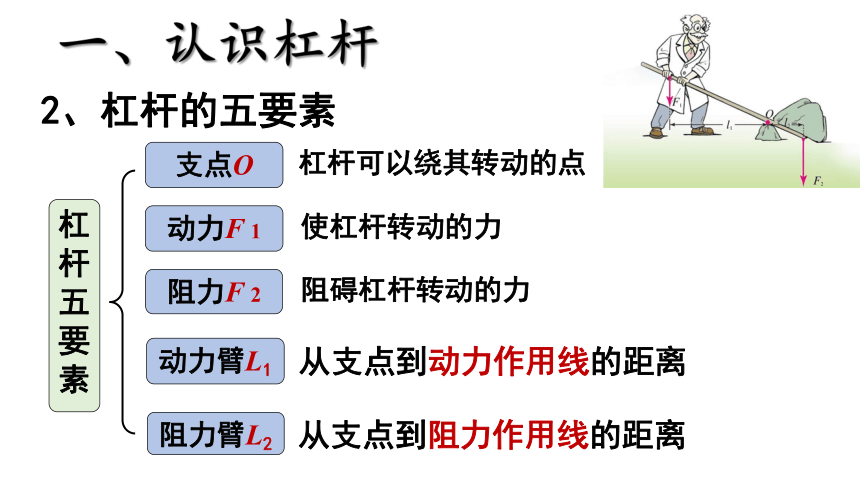
一、认识杠杆
2、杠杆的五要素
杠杆可以绕其转动的点
使杠杆转动的力
阻碍杠杆转动的力
从支点到动力作用线的距离
从支点到阻力作用线的距离
杠杆五要素
支点O
动力臂L1
阻力臂L2
动力F 1
阻力F 2
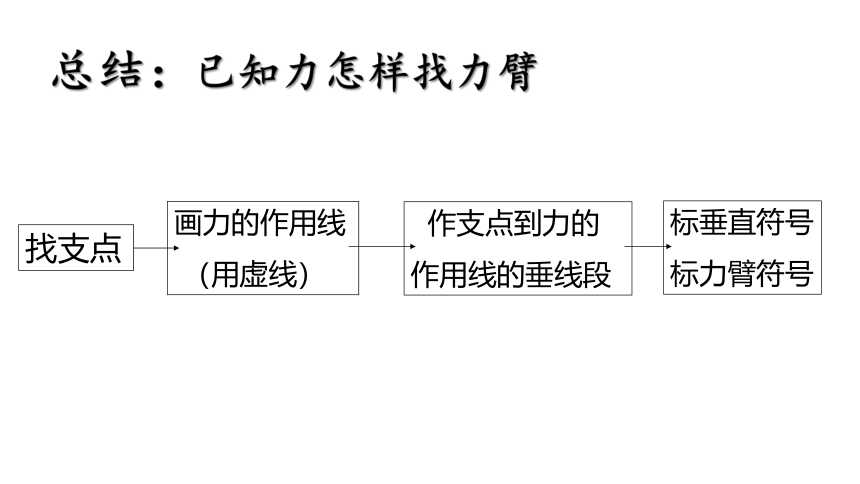
总结:已知力怎样找力臂
找支点
画力的作用线
(用虚线)
作支点到力的
作用线的垂线段
标垂直符号
标力臂符号
命题点
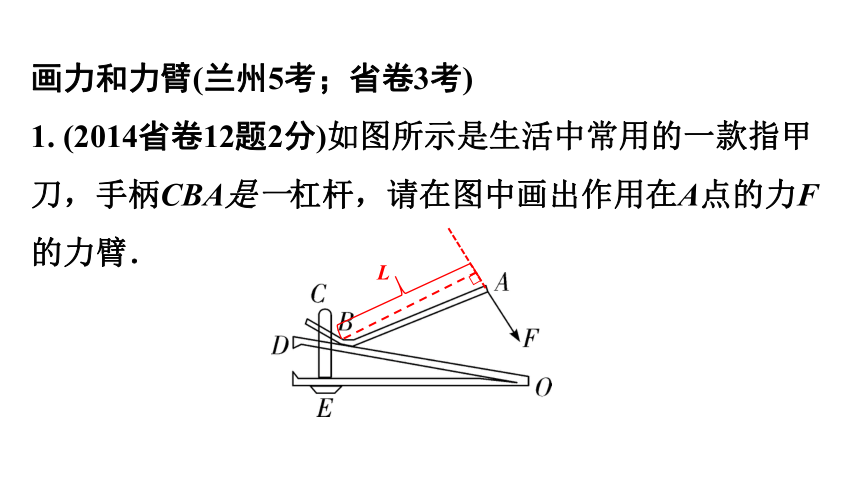
画力和力臂(兰州5考;省卷3考)
1. (2014省卷12题2分)如图所示是生活中常用的一款指甲刀,手柄CBA是一杠杆,请在图中画出作用在A点的力F的力臂.
L
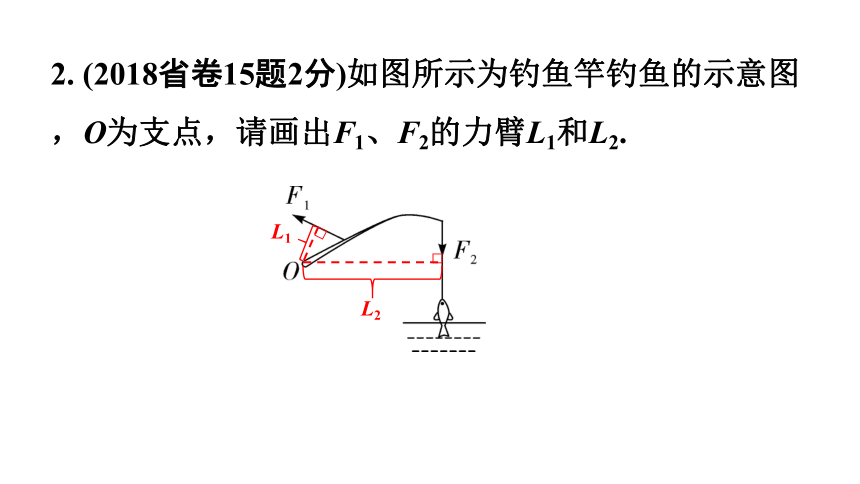
2. (2018省卷15题2分)如图所示为钓鱼竿钓鱼的示意图,O为支点,请画出F1、F2的力臂L1和L2.
L2
L1
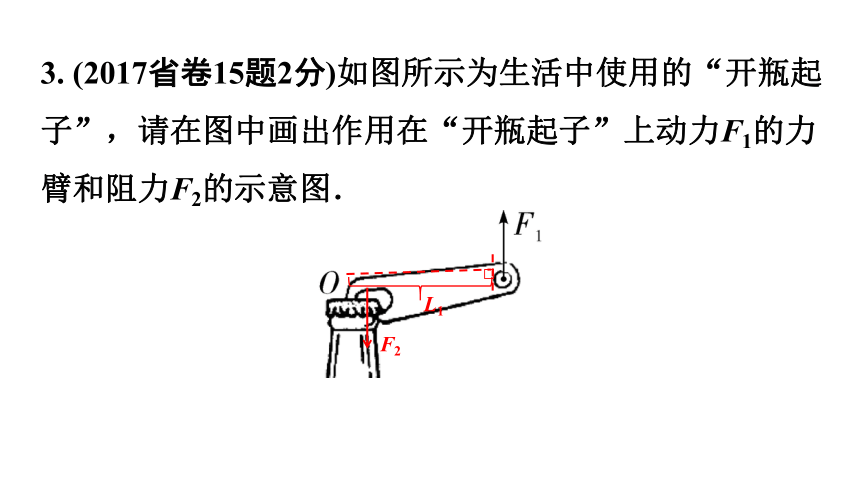
3. (2017省卷15题2分)如图所示为生活中使用的“开瓶起子”,请在图中画出作用在“开瓶起子”上动力F1的力臂和阻力F2的示意图.
L1
F2
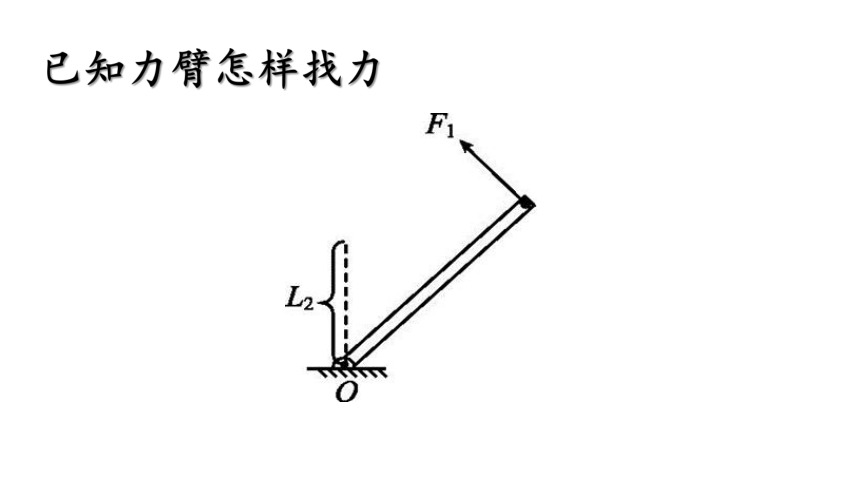
已知力臂怎样找力
总结:已知力臂怎样找力
步骤一:作力的作用线——过力臂的非支点端作力臂的垂线(用虚线表示)
步骤二:确定力的作用点——力的作用线与杠杆的交点
步骤三:确定力的方向——根据动力和阻力使杠杆转动方向相反的特点,确定力的方向
步骤四:作力的示意图——从力的作用点出发沿着力的方向作出力的示意图
跟踪练习
1、如图所示,用起子开启瓶盖时,可看作 ( )
A.以B为支点,动力方向向下的杠杆
B.以B为支点,动力方向向上的杠杆
C.以A为支点,动力方向向下的杠杆
D.以A为支点,动力方向向上的杠杆
跟踪练习
2、如图所示,有一杠杆OA可绕O点转动,在其中点挂一重物,现在A端施加动力FA。
(1)若动力沿F1方向,则动力臂是 阻力臂是
(2)若动力沿F2方向,则动力臂是
跟踪练习
2、如图所示,有一杠杆OA可绕O点转动,在其中点挂一重物,现在A端施加动力FA。
(3)若动力沿F3方向,则动力臂是
(4)若动力沿F4方向,则动力臂是
跟踪练习
3、关于力臂,下列说法错误的是 ( )
A.力臂可以不在杠杆上
B.力的作用线通过支点时,力臂为0
C.从支点到阻力作用点的距离叫阻力臂
D.杠杆在支点处受到的力的力臂一定为0
杠杆在动力和阻力的作用下静止或者匀速转动时,我们称为杠杆平衡。
二、杠杆的平衡条件
1、杠杆平衡的定义:
实验探究
实验前,调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态.为什么要这样做?
二、杠杆的平衡条件
消除杠杆自重对实验的影响
⒈给杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡.这时杠杆两侧受到的作用力等于各自钩码所受的重力.
二、杠杆的平衡条件
便于测量相应的力臂
对于不能确定究竟哪个是动力、哪个是阻力的情况,我们可以根据需要假定,但力与力臂必须对应,不可混淆.
⒉设右侧钩码对杠杆施的力为动力F1,左侧钩码对杠杆施的力为阻力F2;测出杠杆平衡时的动力臂L1和阻力臂L2;把F1、F2、L1、L2的数值填入表格中
二、杠杆的平衡条件
⒊改变动力F1和动力臂L1的大小,相应调节阻力F2和阻力臂L2,再做几次实验.
⒋分析表中的数据,找出它们之间的关系.
二、杠杆的平衡条件
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1 1 0.2 2 0.1
2 2 0.15 1.5 0.2
3 2.5 0.2 2 0.25
…
二、杠杆的平衡条件
比较F1×L1与F2×L2的大小,分析得出结论.
杠杆的平衡条件是:
动力×动力臂=阻力×阻力臂
F1L1=F2L2
在探究杠杆平衡条件实验中应注意的问题
实验前调节杠杆水平平衡
依据:右低左调、左低右调。即:若杠杆右边低,则把平衡螺母向左调节;若杠杆左边低,则把平衡螺母向右调节
实验中杠杆平衡调节
便于从杠杆上直接读出力臂
调节杠杆水平平衡的目的
注意:实验中不可以再调节平衡螺母,调节钩码位置
依据:右低左调、左低右调。
多次实验
目的:避免实验结论的偶然性,使得出的结论更具有普遍性,
三、杠杆的分类
在使用杠杆时,杠杆的动力臂和阻力臂的长度存在着相等或者不等的关系,动力与阻力将存在什么样的关系呢?
根据杠杆的平衡条件进行分析.
杠杆的类型
省力
杠杆
费力
杠杆
等臂
杠杆
动力臂L1 >阻力臂L2
动力F1<阻力F2
动力臂L1 <阻力臂L2
动力F1 >阻力F2
动力臂L1 =阻力臂L2
动力F1 =阻力F2
(能改变力的方向)
杠杆的分类
1
省力杠杆
省力杠杆有哪些特点?
杠杆的分类
【1】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
钢丝钳等
2
费力杠杆
杠杆的分类
【2】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
筷子
为什么要使用费力杠杆呢?
镊子
3
等臂杠杆
天平、定滑轮
杠杆的分类
【3】
【特点】
动力臂等于阻力臂
动力等于阻力
【实例】
有没有既省力又省距离的杠杆?
不省力也不省距离,但可以改变力的方向
指甲刀上涉及的杠杆
如图所示的四种工具中,正常使用时属于费力杠杆的是 ( )
杠杆平衡条件的应用
【最小动力的确定】
【方法】
1、确定支点O和动力作用点(距支点最远处)
3、过动力作用点,作最大动力臂的垂线
2、连线支点和动力作用点,找出最大动力臂
4、根据“顺逆原则”确定动力方向
变式题:如图所示是羊角锤的示意图,请画出用羊角锤撬铁钉时最小动力F1的示意图.
跟踪练习
F1
四、杠杆的变形—轮轴
F1R=F2r
轮轴的应用
如图所示,轻
质杠杆OA可绕
O点转动;OA
=0.3 m,OB
=0.2 m,A点
处挂一个质量为2 kg的物体G,B点处加
一个竖直向上的力F,杠杆在水平位置
平衡,则物体G的重力大小为__N,
力F的大小为__N.(g取10 N/kg)
20
30
跟踪练习
第九章 机械和功
§9.1 杠杆
情境导入
仔细观察下列几幅图,找出它们在使用中的共同特征.
1、定义:
它们有一个共同的特征:在力的作用下能绕着固定点O转动的硬棒就是杠杆.
一、认识杠杆
生活中的杠杆
支点O
动力F 1
阻力F 2
动力臂L1
阻力臂L2
杠
杆
五
要
素
一、认识杠杆
2、杠杆的五要素
杠杆可以绕其转动的点
使杠杆转动的力
阻碍杠杆转动的力
从支点到动力作用线的距离
从支点到阻力作用线的距离
杠杆五要素
支点O
动力臂L1
阻力臂L2
动力F 1
阻力F 2
总结:已知力怎样找力臂
找支点
画力的作用线
(用虚线)
作支点到力的
作用线的垂线段
标垂直符号
标力臂符号
命题点
画力和力臂(兰州5考;省卷3考)
1. (2014省卷12题2分)如图所示是生活中常用的一款指甲刀,手柄CBA是一杠杆,请在图中画出作用在A点的力F的力臂.
L
2. (2018省卷15题2分)如图所示为钓鱼竿钓鱼的示意图,O为支点,请画出F1、F2的力臂L1和L2.
L2
L1
3. (2017省卷15题2分)如图所示为生活中使用的“开瓶起子”,请在图中画出作用在“开瓶起子”上动力F1的力臂和阻力F2的示意图.
L1
F2
已知力臂怎样找力
总结:已知力臂怎样找力
步骤一:作力的作用线——过力臂的非支点端作力臂的垂线(用虚线表示)
步骤二:确定力的作用点——力的作用线与杠杆的交点
步骤三:确定力的方向——根据动力和阻力使杠杆转动方向相反的特点,确定力的方向
步骤四:作力的示意图——从力的作用点出发沿着力的方向作出力的示意图
跟踪练习
1、如图所示,用起子开启瓶盖时,可看作 ( )
A.以B为支点,动力方向向下的杠杆
B.以B为支点,动力方向向上的杠杆
C.以A为支点,动力方向向下的杠杆
D.以A为支点,动力方向向上的杠杆
跟踪练习
2、如图所示,有一杠杆OA可绕O点转动,在其中点挂一重物,现在A端施加动力FA。
(1)若动力沿F1方向,则动力臂是 阻力臂是
(2)若动力沿F2方向,则动力臂是
跟踪练习
2、如图所示,有一杠杆OA可绕O点转动,在其中点挂一重物,现在A端施加动力FA。
(3)若动力沿F3方向,则动力臂是
(4)若动力沿F4方向,则动力臂是
跟踪练习
3、关于力臂,下列说法错误的是 ( )
A.力臂可以不在杠杆上
B.力的作用线通过支点时,力臂为0
C.从支点到阻力作用点的距离叫阻力臂
D.杠杆在支点处受到的力的力臂一定为0
杠杆在动力和阻力的作用下静止或者匀速转动时,我们称为杠杆平衡。
二、杠杆的平衡条件
1、杠杆平衡的定义:
实验探究
实验前,调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态.为什么要这样做?
二、杠杆的平衡条件
消除杠杆自重对实验的影响
⒈给杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡.这时杠杆两侧受到的作用力等于各自钩码所受的重力.
二、杠杆的平衡条件
便于测量相应的力臂
对于不能确定究竟哪个是动力、哪个是阻力的情况,我们可以根据需要假定,但力与力臂必须对应,不可混淆.
⒉设右侧钩码对杠杆施的力为动力F1,左侧钩码对杠杆施的力为阻力F2;测出杠杆平衡时的动力臂L1和阻力臂L2;把F1、F2、L1、L2的数值填入表格中
二、杠杆的平衡条件
⒊改变动力F1和动力臂L1的大小,相应调节阻力F2和阻力臂L2,再做几次实验.
⒋分析表中的数据,找出它们之间的关系.
二、杠杆的平衡条件
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1 1 0.2 2 0.1
2 2 0.15 1.5 0.2
3 2.5 0.2 2 0.25
…
二、杠杆的平衡条件
比较F1×L1与F2×L2的大小,分析得出结论.
杠杆的平衡条件是:
动力×动力臂=阻力×阻力臂
F1L1=F2L2
在探究杠杆平衡条件实验中应注意的问题
实验前调节杠杆水平平衡
依据:右低左调、左低右调。即:若杠杆右边低,则把平衡螺母向左调节;若杠杆左边低,则把平衡螺母向右调节
实验中杠杆平衡调节
便于从杠杆上直接读出力臂
调节杠杆水平平衡的目的
注意:实验中不可以再调节平衡螺母,调节钩码位置
依据:右低左调、左低右调。
多次实验
目的:避免实验结论的偶然性,使得出的结论更具有普遍性,
三、杠杆的分类
在使用杠杆时,杠杆的动力臂和阻力臂的长度存在着相等或者不等的关系,动力与阻力将存在什么样的关系呢?
根据杠杆的平衡条件进行分析.
杠杆的类型
省力
杠杆
费力
杠杆
等臂
杠杆
动力臂L1 >阻力臂L2
动力F1<阻力F2
动力臂L1 <阻力臂L2
动力F1 >阻力F2
动力臂L1 =阻力臂L2
动力F1 =阻力F2
(能改变力的方向)
杠杆的分类
1
省力杠杆
省力杠杆有哪些特点?
杠杆的分类
【1】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
钢丝钳等
2
费力杠杆
杠杆的分类
【2】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
筷子
为什么要使用费力杠杆呢?
镊子
3
等臂杠杆
天平、定滑轮
杠杆的分类
【3】
【特点】
动力臂等于阻力臂
动力等于阻力
【实例】
有没有既省力又省距离的杠杆?
不省力也不省距离,但可以改变力的方向
指甲刀上涉及的杠杆
如图所示的四种工具中,正常使用时属于费力杠杆的是 ( )
杠杆平衡条件的应用
【最小动力的确定】
【方法】
1、确定支点O和动力作用点(距支点最远处)
3、过动力作用点,作最大动力臂的垂线
2、连线支点和动力作用点,找出最大动力臂
4、根据“顺逆原则”确定动力方向
变式题:如图所示是羊角锤的示意图,请画出用羊角锤撬铁钉时最小动力F1的示意图.
跟踪练习
F1
四、杠杆的变形—轮轴
F1R=F2r
轮轴的应用
如图所示,轻
质杠杆OA可绕
O点转动;OA
=0.3 m,OB
=0.2 m,A点
处挂一个质量为2 kg的物体G,B点处加
一个竖直向上的力F,杠杆在水平位置
平衡,则物体G的重力大小为__N,
力F的大小为__N.(g取10 N/kg)
20
30
跟踪练习