12.1杠杆课件2021-2022学年人教版物理八年级下册(共33张PPT)
文档属性
| 名称 | 12.1杠杆课件2021-2022学年人教版物理八年级下册(共33张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 15.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-05-23 00:00:00 | ||
图片预览

文档简介
(共33张PPT)
第十二章 第1节 杠杆
自学指导
1.什么是杠杆?
2.如何进行杠杆作图:
3.杠杆的平衡条件是什么?
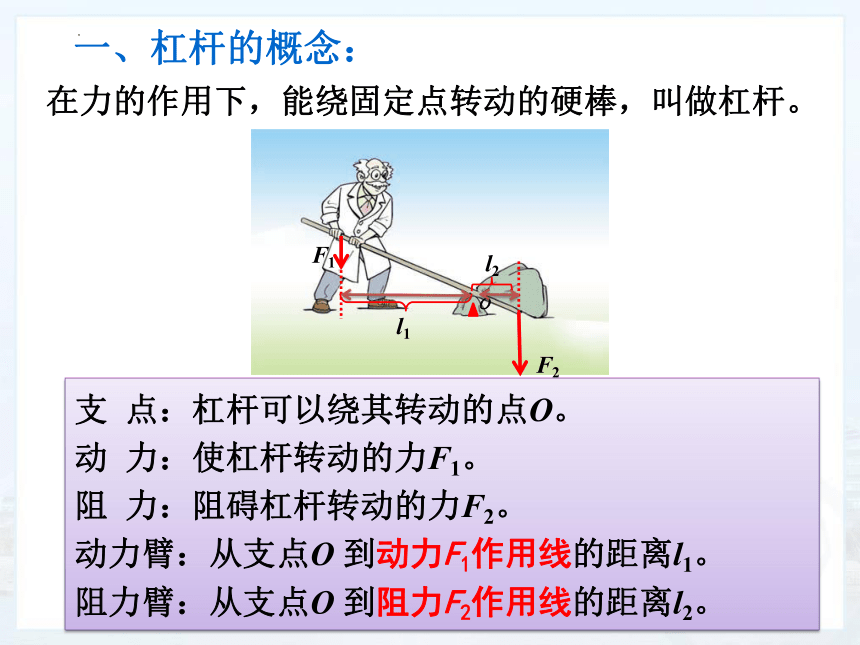
在力的作用下,能绕固定点转动的硬棒,叫做杠杆。
一、杠杆的概念:
支 点:杠杆可以绕其转动的点O。
动 力:使杠杆转动的力F1。
阻 力:阻碍杠杆转动的力F2。
动力臂:从支点O 到动力F1作用线的距离l1。
阻力臂:从支点O 到阻力F2作用线的距离l2。
F1
F2
l1
o
支 点:杠杆可以绕其转动的点O。
动 力:使杠杆转动的力F1。
阻 力:阻碍杠杆转动的力F2。
动力臂:从支点O 到动力F1作用线的距离l1。
阻力臂:从支点O 到阻力F2作用线的距离l2。
l2
1.关于杠杆,下列说法中正确的是 ( )
A.杠杆一定是一根直的硬棒
B.杠杆的支点一定在杠杆上,且在杠杆的中间位置
C.力臂可能在杠杆上也可能不在杠杆上
D.作用在杠杆上的动力一定与阻力方向相反
C
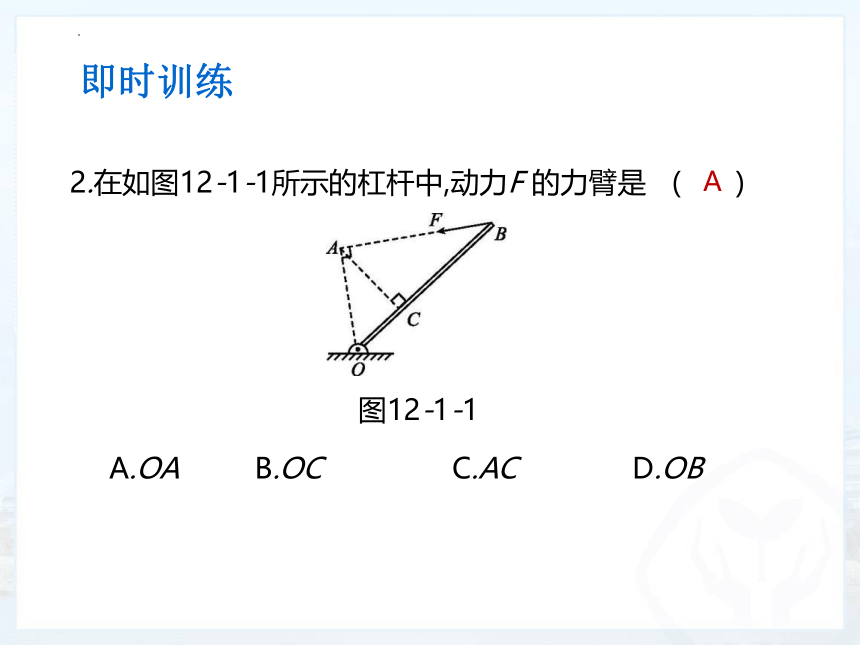
即时训练
2.在如图12-1-1所示的杠杆中,动力F 的力臂是 ( )
A.OA B.OC C.AC D.OB
图12-1-1
A
即时训练
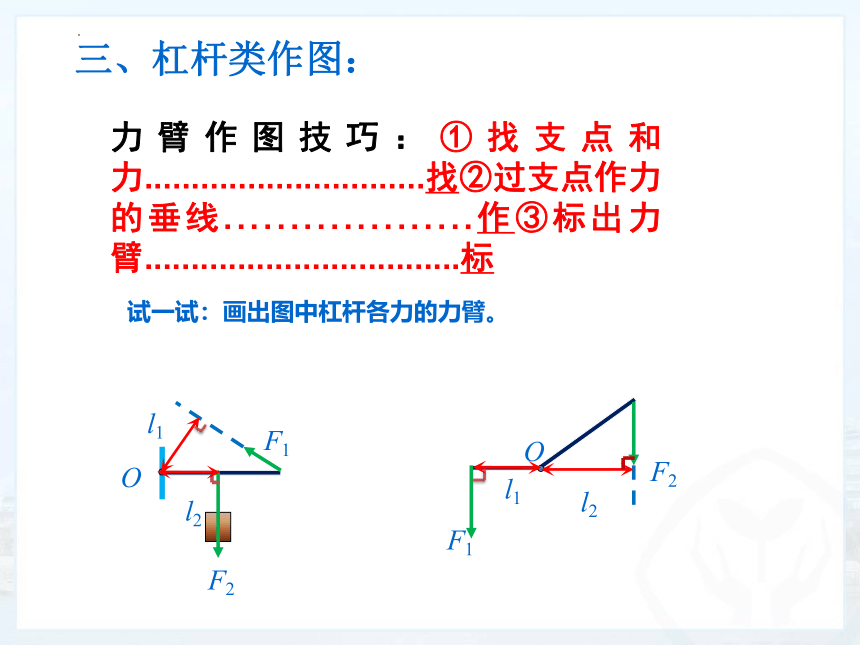
三、杠杆类作图:
力臂作图技巧:①找支点和力..............................找②过支点作力的垂线...................作③标出力臂..................................标
试一试:画出图中杠杆各力的力臂。
F1
l1
l2
F1
F2
l1
O
l2
O
F2
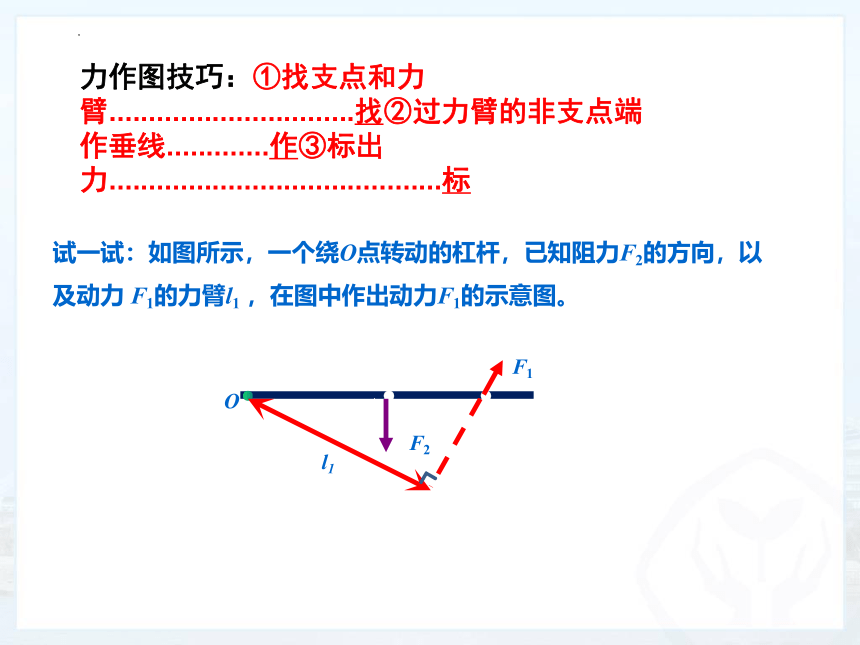
力作图技巧:①找支点和力臂...............................找②过力臂的非支点端作垂线.............作③标出力..........................................标
试一试:如图所示,一个绕O点转动的杠杆,已知阻力F2的方向,以及动力 F1的力臂l1 ,在图中作出动力F1的示意图。
∟
F2
●
O
F1
l1
●
●
∟
∟
注意事项:
①力臂过短做延长线
②力臂为实线双箭头
③力为实线单箭头
④别忘垂足符号
⑤动力和阻力方向绕支点相反
3.请在图12-1-2中画出压力F的力臂l。
图12-1-2
如图所示
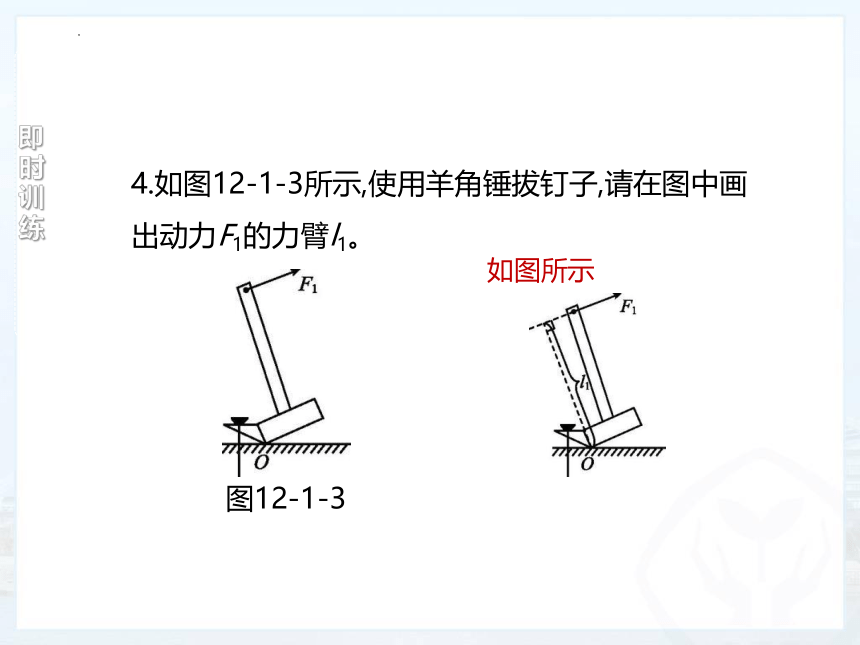
4.如图12-1-3所示,使用羊角锤拔钉子,请在图中画出动力F1的力臂l1。
图12-1-3
如图所示
即时训练
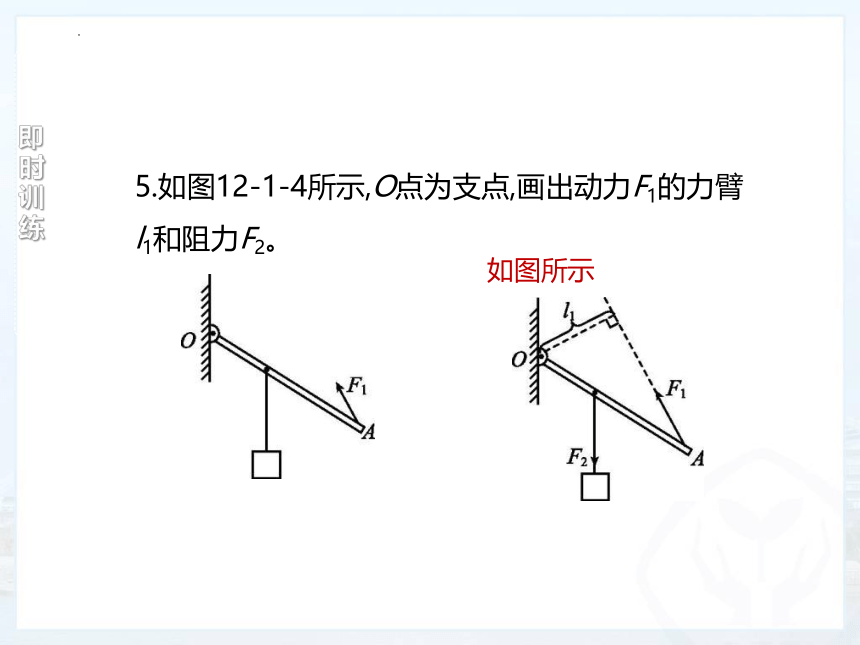
5.如图12-1-4所示,O点为支点,画出动力F1的力臂l1和阻力F2。
如图所示
即时训练
三、杠杆的平衡条件:
三、杠杆的平衡条件:
2.探究杠杆的平衡条件
1.杠杆平衡:杠杆在动力和阻力作用下处于静止匀速绕支点转动状态时,我们就说杠杆平衡。
问题:杠杆怎样才会平衡呢?
(1)挂上钩码前,要让杠杆的重心(中心)作为支点,并调节杠杆两端的平衡螺母使杠杆保持水平并静止,达到平衡状态。这样做的目的是 :
消除杠杆自身重力对实验的影响,便于测量力臂
注意事项:
1.调节方法是杠杆哪端高,就向哪端调节平衡螺母。
2.挂上钩码后不得再调节平衡螺母。
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
(4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
杠杆平衡时,动力×动力臂=阻力×阻力臂。
次数 动力F1/N 阻力F2/N 动力臂l1/m 阻力臂l2/m
1
2
3
4
5
6
注意事项:
(1)挂上钩码后,通过调节钩码的位置让杠杆再次在水平位置平衡,这样做的目的是 便于测量力臂。 (2)改变钩码的个数和位置进行多次实验,目的是避免实验的偶然性,寻找普遍规律。(3)处理数据时,力和力臂相乘而不是相加是因为 力和力臂是不同的物理量,不能相加。
即时训练:全品作业本12.1.1第6题
6.如图12-1-5所示是探究“杠杆平衡条件”的实验装置。
(1)图中杠杆静止,处于 (选填“平衡”或“不平衡”)状态。
(2)实验时调节杠杆在水平位置平衡的
目的是______________________________
____________。
消除杠杆自身重力的影响,便于
知识点 2 探究杠杆的平衡条件
图12-1-5
平衡
测量力臂
即时训练
(3)通过分析下面的实验记录表中1、2两次实验数据可得出杠杆的平衡条件是____________________________
______________ 。(4)将表格空白处填写完整。
次数 动力F1/ N 动力臂l1/cm 阻力F2/ N 阻力臂l2/cm
1 1 2.0 0.5 4.0
2 2 3.0 3 2.0
3 3 2.0 2 _____
3.0
动力×动力臂=阻力×阻力臂
(或F1l1=F2l2)
即时训练
(5)实验中进行多次实验的目的是 (选填“A”或“B”)。
A.取平均值减少误差
B.使实验结论具有普遍性
(6)根据第2次实验数据有同学得出杠杆的平衡条件:动力+动力臂=阻力+阻力臂。他得出此错误结论的原因是 。
B
将不同性质的物理量进行了加法运算,没有实际意义
即时训练
在“研究杠杆平衡条件”的实验中:
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向_____边旋转,使杠杆在水平位置平衡(填“左”或“右”)。
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2格的A处挂了3个钩码,如图21所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是____________________。
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是________。
(4)你得到的结论是____________.
左
右侧第三格挂两个钩码(答案对即可)
多次验证寻找普遍规律
动力×动力臂=阻力×阻力臂
即时训练
4.小阳同学在做“探究杠杆平衡条件”的实验时,他把杠杆挂在支架上,发现左端向下倾斜。
(1)若使杠杆在 位置平衡,需把平衡螺母向
端调节。
(2)如果在杠杆的A处挂三个相同的钩码,则在B处要挂 个同样的钩码,杠杆才能重新位置平衡。
(3)若在C处挂6 N的钩码,用弹簧测力计作用在B点,要使杠杆在水平位置平衡,最小拉力的方向应该 ,此时弹簧测力计的示数为 。
水平
右
2
O
A
C
B
竖直向上
2 N
即时训练
课堂小结
2.杠杆的平衡条件:
1.在力的作用下,能绕固定点转动的硬棒,叫做杠杆
7.皮划艇是我国奥运优势项目之一,如图12-1
-6所示,运动员一只手撑住桨柄的末端,另一只
手用力划桨,此时的船桨可看成一个杠杆。如
图12-1-7所示的船桨模型中最合理的是( )
B
图12-1-7
达标检测
达标检测
达标检测
8.如图12-1-8所示,一把尺子,在中点支起,两边挂上钩码,恰好在水平位置平衡。在下列情况中,尺子仍能在水平位置保持平衡的是 ( )
A.左、右两边钩码组各向内移动一格
B.左、右两边钩码组各减少一个钩码
C.左、右两边钩码组各增加一倍钩码
D.左、右两边钩码组各向外移动一格
C
图12-1-8
达标检测
9.如图12-1-9所示,杠杆AB在力F 和重物G 的阻力作用下,在水平位置处于平衡状态。下列判断中正确的是( )A.G·OB=F·OA
B.G·OB=F·OCC.G·OB=F·OD
D.G·OB=F·DE
B
图12-1-9
达标检测
10.图12-1-10中,杠杆在图示位置静止,请作出杠杆的动力臂l1与阻力臂l2。
图12-1-10
如图所示
达标检测
11.(2021洛阳模拟)为了更好地开展网上直播教学,物理老师自制了“手机支架”来录制在本子上书写的解题过程。如图12-1-11所示,将手机放在水杯上,用铁锁压在手机右端,防止手机掉落。如果把手机看成一个杠杆,O为支点,请画出阻碍手机掉落的力的示意图和该力的力臂。
达标检测
图12-1-11
如图所示
达标检测
12.如图12-1-12所示是利用铁架台、
带有均匀刻度的匀质杠杆、细线、数
量足够且重力均为0.5 N的钩码等器
材探究“杠杆平衡条件”的实验装置。
(1)实验前,将杠杆的中点置于支架上,当
杠杆静止时,发现杠杆左端较低,这时应将平衡螺母向
(选填“左”或“右”)端调节,直到杠杆在水平位置平衡。
右
图12-1-12
达标检测
(2)在A点悬挂3个钩码,要使杠杆在水平位置平衡,应在B点悬挂 个钩码;取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向下拉,当杠杆在水平位置平衡时,弹簧测力计的拉力为 N;若弹簧测力计仍拉住C点,改变拉力的方向,斜向右下方(如图中虚线方向)拉弹簧测力计,使杠杆仍在水平位置平衡,则弹簧测力计的示数将
(选填“大于”“等于”或“小于”)0.5 N。
2
0.5
大于
达标检测
达标检测
13.(2020信阳固始期末)如图12-1-13所示,起瓶器开启瓶盖时,可看成 ( )A.以B为支点,动力方向向下的杠杆
B.以B为支点,动力方向向上的杠杆C.以A为支点,动力方向向下的杠杆
D.以A为支点,动力方向向上的杠杆
D
图12-1-13
达标检测
第十二章 第1节 杠杆
自学指导
1.什么是杠杆?
2.如何进行杠杆作图:
3.杠杆的平衡条件是什么?
在力的作用下,能绕固定点转动的硬棒,叫做杠杆。
一、杠杆的概念:
支 点:杠杆可以绕其转动的点O。
动 力:使杠杆转动的力F1。
阻 力:阻碍杠杆转动的力F2。
动力臂:从支点O 到动力F1作用线的距离l1。
阻力臂:从支点O 到阻力F2作用线的距离l2。
F1
F2
l1
o
支 点:杠杆可以绕其转动的点O。
动 力:使杠杆转动的力F1。
阻 力:阻碍杠杆转动的力F2。
动力臂:从支点O 到动力F1作用线的距离l1。
阻力臂:从支点O 到阻力F2作用线的距离l2。
l2
1.关于杠杆,下列说法中正确的是 ( )
A.杠杆一定是一根直的硬棒
B.杠杆的支点一定在杠杆上,且在杠杆的中间位置
C.力臂可能在杠杆上也可能不在杠杆上
D.作用在杠杆上的动力一定与阻力方向相反
C
即时训练
2.在如图12-1-1所示的杠杆中,动力F 的力臂是 ( )
A.OA B.OC C.AC D.OB
图12-1-1
A
即时训练
三、杠杆类作图:
力臂作图技巧:①找支点和力..............................找②过支点作力的垂线...................作③标出力臂..................................标
试一试:画出图中杠杆各力的力臂。
F1
l1
l2
F1
F2
l1
O
l2
O
F2
力作图技巧:①找支点和力臂...............................找②过力臂的非支点端作垂线.............作③标出力..........................................标
试一试:如图所示,一个绕O点转动的杠杆,已知阻力F2的方向,以及动力 F1的力臂l1 ,在图中作出动力F1的示意图。
∟
F2
●
O
F1
l1
●
●
∟
∟
注意事项:
①力臂过短做延长线
②力臂为实线双箭头
③力为实线单箭头
④别忘垂足符号
⑤动力和阻力方向绕支点相反
3.请在图12-1-2中画出压力F的力臂l。
图12-1-2
如图所示
4.如图12-1-3所示,使用羊角锤拔钉子,请在图中画出动力F1的力臂l1。
图12-1-3
如图所示
即时训练
5.如图12-1-4所示,O点为支点,画出动力F1的力臂l1和阻力F2。
如图所示
即时训练
三、杠杆的平衡条件:
三、杠杆的平衡条件:
2.探究杠杆的平衡条件
1.杠杆平衡:杠杆在动力和阻力作用下处于静止匀速绕支点转动状态时,我们就说杠杆平衡。
问题:杠杆怎样才会平衡呢?
(1)挂上钩码前,要让杠杆的重心(中心)作为支点,并调节杠杆两端的平衡螺母使杠杆保持水平并静止,达到平衡状态。这样做的目的是 :
消除杠杆自身重力对实验的影响,便于测量力臂
注意事项:
1.调节方法是杠杆哪端高,就向哪端调节平衡螺母。
2.挂上钩码后不得再调节平衡螺母。
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
(4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
杠杆平衡时,动力×动力臂=阻力×阻力臂。
次数 动力F1/N 阻力F2/N 动力臂l1/m 阻力臂l2/m
1
2
3
4
5
6
注意事项:
(1)挂上钩码后,通过调节钩码的位置让杠杆再次在水平位置平衡,这样做的目的是 便于测量力臂。 (2)改变钩码的个数和位置进行多次实验,目的是避免实验的偶然性,寻找普遍规律。(3)处理数据时,力和力臂相乘而不是相加是因为 力和力臂是不同的物理量,不能相加。
即时训练:全品作业本12.1.1第6题
6.如图12-1-5所示是探究“杠杆平衡条件”的实验装置。
(1)图中杠杆静止,处于 (选填“平衡”或“不平衡”)状态。
(2)实验时调节杠杆在水平位置平衡的
目的是______________________________
____________。
消除杠杆自身重力的影响,便于
知识点 2 探究杠杆的平衡条件
图12-1-5
平衡
测量力臂
即时训练
(3)通过分析下面的实验记录表中1、2两次实验数据可得出杠杆的平衡条件是____________________________
______________ 。(4)将表格空白处填写完整。
次数 动力F1/ N 动力臂l1/cm 阻力F2/ N 阻力臂l2/cm
1 1 2.0 0.5 4.0
2 2 3.0 3 2.0
3 3 2.0 2 _____
3.0
动力×动力臂=阻力×阻力臂
(或F1l1=F2l2)
即时训练
(5)实验中进行多次实验的目的是 (选填“A”或“B”)。
A.取平均值减少误差
B.使实验结论具有普遍性
(6)根据第2次实验数据有同学得出杠杆的平衡条件:动力+动力臂=阻力+阻力臂。他得出此错误结论的原因是 。
B
将不同性质的物理量进行了加法运算,没有实际意义
即时训练
在“研究杠杆平衡条件”的实验中:
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向_____边旋转,使杠杆在水平位置平衡(填“左”或“右”)。
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2格的A处挂了3个钩码,如图21所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是____________________。
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是________。
(4)你得到的结论是____________.
左
右侧第三格挂两个钩码(答案对即可)
多次验证寻找普遍规律
动力×动力臂=阻力×阻力臂
即时训练
4.小阳同学在做“探究杠杆平衡条件”的实验时,他把杠杆挂在支架上,发现左端向下倾斜。
(1)若使杠杆在 位置平衡,需把平衡螺母向
端调节。
(2)如果在杠杆的A处挂三个相同的钩码,则在B处要挂 个同样的钩码,杠杆才能重新位置平衡。
(3)若在C处挂6 N的钩码,用弹簧测力计作用在B点,要使杠杆在水平位置平衡,最小拉力的方向应该 ,此时弹簧测力计的示数为 。
水平
右
2
O
A
C
B
竖直向上
2 N
即时训练
课堂小结
2.杠杆的平衡条件:
1.在力的作用下,能绕固定点转动的硬棒,叫做杠杆
7.皮划艇是我国奥运优势项目之一,如图12-1
-6所示,运动员一只手撑住桨柄的末端,另一只
手用力划桨,此时的船桨可看成一个杠杆。如
图12-1-7所示的船桨模型中最合理的是( )
B
图12-1-7
达标检测
达标检测
达标检测
8.如图12-1-8所示,一把尺子,在中点支起,两边挂上钩码,恰好在水平位置平衡。在下列情况中,尺子仍能在水平位置保持平衡的是 ( )
A.左、右两边钩码组各向内移动一格
B.左、右两边钩码组各减少一个钩码
C.左、右两边钩码组各增加一倍钩码
D.左、右两边钩码组各向外移动一格
C
图12-1-8
达标检测
9.如图12-1-9所示,杠杆AB在力F 和重物G 的阻力作用下,在水平位置处于平衡状态。下列判断中正确的是( )A.G·OB=F·OA
B.G·OB=F·OCC.G·OB=F·OD
D.G·OB=F·DE
B
图12-1-9
达标检测
10.图12-1-10中,杠杆在图示位置静止,请作出杠杆的动力臂l1与阻力臂l2。
图12-1-10
如图所示
达标检测
11.(2021洛阳模拟)为了更好地开展网上直播教学,物理老师自制了“手机支架”来录制在本子上书写的解题过程。如图12-1-11所示,将手机放在水杯上,用铁锁压在手机右端,防止手机掉落。如果把手机看成一个杠杆,O为支点,请画出阻碍手机掉落的力的示意图和该力的力臂。
达标检测
图12-1-11
如图所示
达标检测
12.如图12-1-12所示是利用铁架台、
带有均匀刻度的匀质杠杆、细线、数
量足够且重力均为0.5 N的钩码等器
材探究“杠杆平衡条件”的实验装置。
(1)实验前,将杠杆的中点置于支架上,当
杠杆静止时,发现杠杆左端较低,这时应将平衡螺母向
(选填“左”或“右”)端调节,直到杠杆在水平位置平衡。
右
图12-1-12
达标检测
(2)在A点悬挂3个钩码,要使杠杆在水平位置平衡,应在B点悬挂 个钩码;取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向下拉,当杠杆在水平位置平衡时,弹簧测力计的拉力为 N;若弹簧测力计仍拉住C点,改变拉力的方向,斜向右下方(如图中虚线方向)拉弹簧测力计,使杠杆仍在水平位置平衡,则弹簧测力计的示数将
(选填“大于”“等于”或“小于”)0.5 N。
2
0.5
大于
达标检测
达标检测
13.(2020信阳固始期末)如图12-1-13所示,起瓶器开启瓶盖时,可看成 ( )A.以B为支点,动力方向向下的杠杆
B.以B为支点,动力方向向上的杠杆C.以A为支点,动力方向向下的杠杆
D.以A为支点,动力方向向上的杠杆
D
图12-1-13
达标检测