初中物理人教版八年级下册第十二章 简单机械 第一节 杠杆 课件(共14张PPT)
文档属性
| 名称 | 初中物理人教版八年级下册第十二章 简单机械 第一节 杠杆 课件(共14张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 5.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-06-02 00:00:00 | ||
图片预览


文档简介
(共14张PPT)
第十二章简单机械
biology
我们的周围有各种样的机械:提升重物的起重机,计时的钟表,甚至
小小的瓶起子.…现在,机械更进入了太空。2005年7月30日,美国宇航员
史蒂夫·罗宾逊就在机械臂的辅助下,对“发现号”航天飞机的隔热层进行
了维修。
各种各样的机械展现了人类的智慧。有的机械简单,有的机械复杂。
不管机械多么复杂,都可以从中找到构成它们的基本元素一杆、轮、链
条等。
第十二章简单机械
biology
阿基米德说:“给我一
个立足点和一根足够长
的棍,我就能橇动整个
地球!”
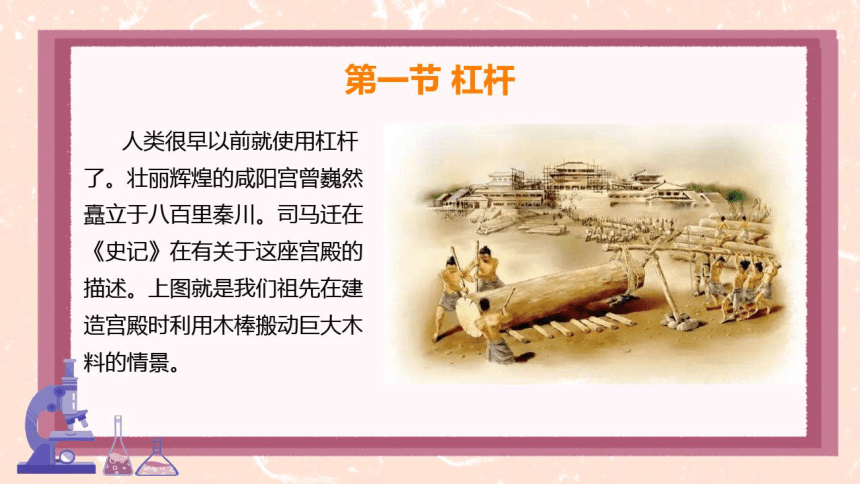
第一节杠杆
人类很早以前就使用杠杆
了。壮丽辉煌的咸阳宫曾巍然
矗立于八百里秦川。司马迁在
《史记》在有关于这座宫殿的
描述。上图就是我们祖先在建
造宫殿时利用木棒搬动巨大木
料的情景。
杠杆的定义
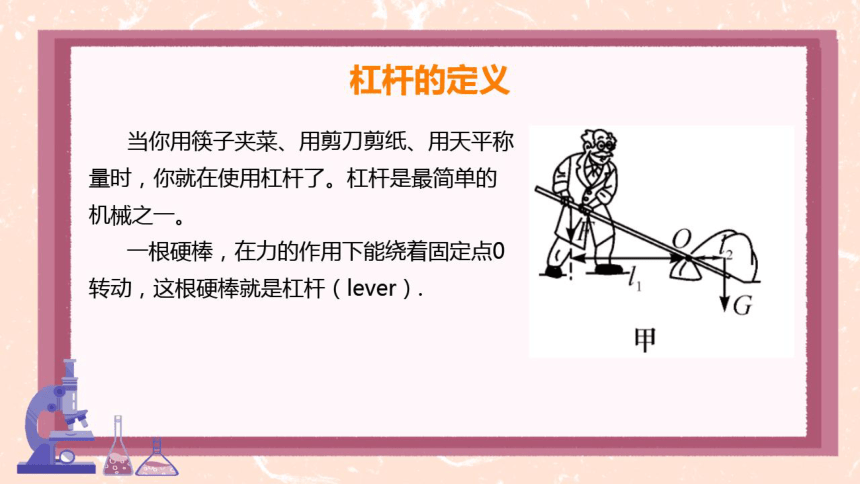
当你用筷子夹菜、用剪刀剪纸、用天平称
量时,你就在使用杠杆了。杠杆是最简单的
机械之一。
一根硬棒,在力的作用下能绕着固定点0
转动,这根硬棒就是杠杆(lever).
杠杆的定义
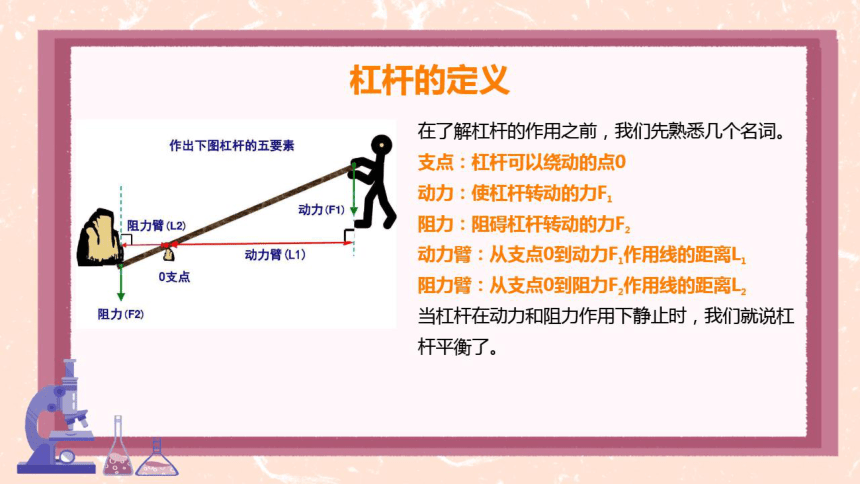
在了解杠杆的作用之前,我们先熟悉几个名词。
作出下图杠杆的五要素
支点:杠杆可以绕动的点0
动力:使杠杆转动的力F,
动力(F1)
阻力臂(L2)
阻力:阻碍杠杆转动的力F2
动力臂(L1)
动力臂:从支点0到动力F,作用线的距离L
0支点
阻力臂:从支点0到阻力F2作用线的距离L
阻力(F2)
当杠杆在动力和阻力作用下静止时,我们就说杠
杆平衡了。
杠杆的平衡条件
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。杠杆在满足什么条件时才
会平衡?
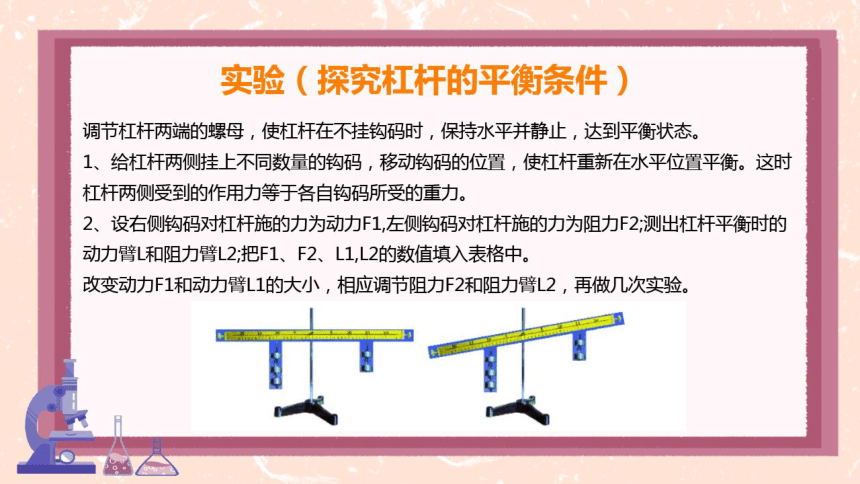
实验(探究杠杆的平衡条件)
调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
1、给杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡。这时
杠杆两侧受到的作用力等于各自钩码所受的重力。
2、设右侧钩码对杠杆施的力为动力F1,左侧钩码对杠杆施的力为阻力F2;测出杠杆平衡时的
动力臂L和阻力臂L2把F1、F2、L1,L2的数值填入表格中。
改变动力F1和动力臂L1的大小,相应调节阻力F2和阻力臂L2,再做几次实验。
实验结论
实验结果表明,杠杆的平衡条件是:
动力×动力臂=阻力×阻力臂
或泻为
F1L1=F2L2
这个平衡条件就是阿基米德发现的杠杆原理。
例题
据《杭州日报》报道,2001年6月22日,在杭州动物园内,一位物理老师利用杠杆原理
仅用小小的弹簧测力计就测出了一头大象的质量。测量时利用了一根长为12的槽钢作为
杠杆。吊钩固定于槽钢的中点O,当槽钢水平静止时,弹簧测力计示数F1为200N。测得L1
为6m,L2为4cm。若不计铁笼的质量,请你估算大象的质量。g取10N/kg。
第十二章简单机械
biology
我们的周围有各种样的机械:提升重物的起重机,计时的钟表,甚至
小小的瓶起子.…现在,机械更进入了太空。2005年7月30日,美国宇航员
史蒂夫·罗宾逊就在机械臂的辅助下,对“发现号”航天飞机的隔热层进行
了维修。
各种各样的机械展现了人类的智慧。有的机械简单,有的机械复杂。
不管机械多么复杂,都可以从中找到构成它们的基本元素一杆、轮、链
条等。
第十二章简单机械
biology
阿基米德说:“给我一
个立足点和一根足够长
的棍,我就能橇动整个
地球!”
第一节杠杆
人类很早以前就使用杠杆
了。壮丽辉煌的咸阳宫曾巍然
矗立于八百里秦川。司马迁在
《史记》在有关于这座宫殿的
描述。上图就是我们祖先在建
造宫殿时利用木棒搬动巨大木
料的情景。
杠杆的定义
当你用筷子夹菜、用剪刀剪纸、用天平称
量时,你就在使用杠杆了。杠杆是最简单的
机械之一。
一根硬棒,在力的作用下能绕着固定点0
转动,这根硬棒就是杠杆(lever).
杠杆的定义
在了解杠杆的作用之前,我们先熟悉几个名词。
作出下图杠杆的五要素
支点:杠杆可以绕动的点0
动力:使杠杆转动的力F,
动力(F1)
阻力臂(L2)
阻力:阻碍杠杆转动的力F2
动力臂(L1)
动力臂:从支点0到动力F,作用线的距离L
0支点
阻力臂:从支点0到阻力F2作用线的距离L
阻力(F2)
当杠杆在动力和阻力作用下静止时,我们就说杠
杆平衡了。
杠杆的平衡条件
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。杠杆在满足什么条件时才
会平衡?
实验(探究杠杆的平衡条件)
调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
1、给杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡。这时
杠杆两侧受到的作用力等于各自钩码所受的重力。
2、设右侧钩码对杠杆施的力为动力F1,左侧钩码对杠杆施的力为阻力F2;测出杠杆平衡时的
动力臂L和阻力臂L2把F1、F2、L1,L2的数值填入表格中。
改变动力F1和动力臂L1的大小,相应调节阻力F2和阻力臂L2,再做几次实验。
实验结论
实验结果表明,杠杆的平衡条件是:
动力×动力臂=阻力×阻力臂
或泻为
F1L1=F2L2
这个平衡条件就是阿基米德发现的杠杆原理。
例题
据《杭州日报》报道,2001年6月22日,在杭州动物园内,一位物理老师利用杠杆原理
仅用小小的弹簧测力计就测出了一头大象的质量。测量时利用了一根长为12的槽钢作为
杠杆。吊钩固定于槽钢的中点O,当槽钢水平静止时,弹簧测力计示数F1为200N。测得L1
为6m,L2为4cm。若不计铁笼的质量,请你估算大象的质量。g取10N/kg。