第25课制作安全小门阀课件(21PPT)-四年级全一册信息技术华中师大出版社
文档属性
| 名称 | 第25课制作安全小门阀课件(21PPT)-四年级全一册信息技术华中师大出版社 |
|
|
| 格式 | pptx | ||
| 文件大小 | 1.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2022-06-13 00:00:00 | ||
图片预览
文档简介
(共21张PPT)
第25课 制作安全小门阀
1.掌握机器人积木各部件的整体搭建。
2.会将积木部件进行旋转和组装。
3.会控制马达的运行时间和偏转角度。
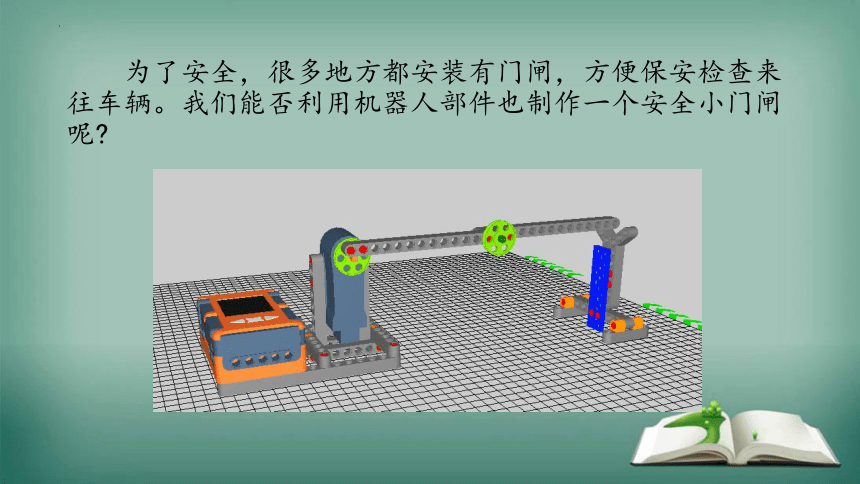
为了安全,很多地方都安装有门闸,方便保安检查来往车辆。我们能否利用机器人部件也制作一个安全小门闸呢
让我们一步一步来完成这个小门闸的整体搭建吧。
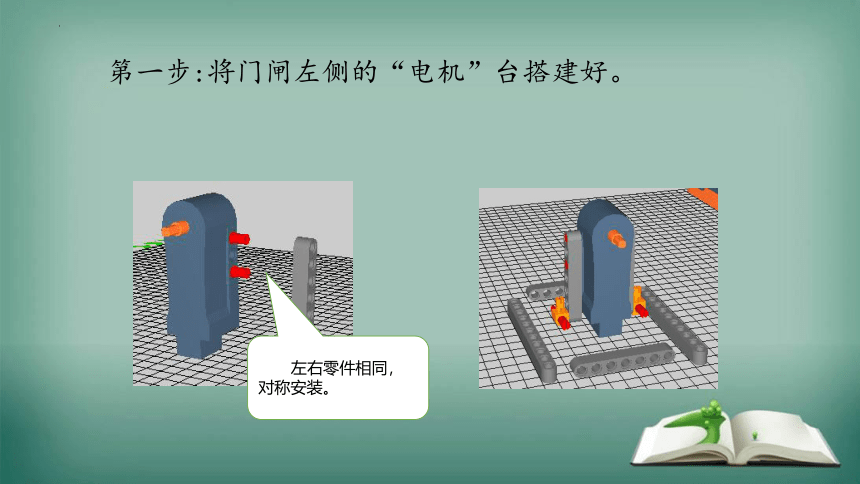
左右零件相同,对称安装。
第一步:将门闸左侧的“电机”台搭建好。
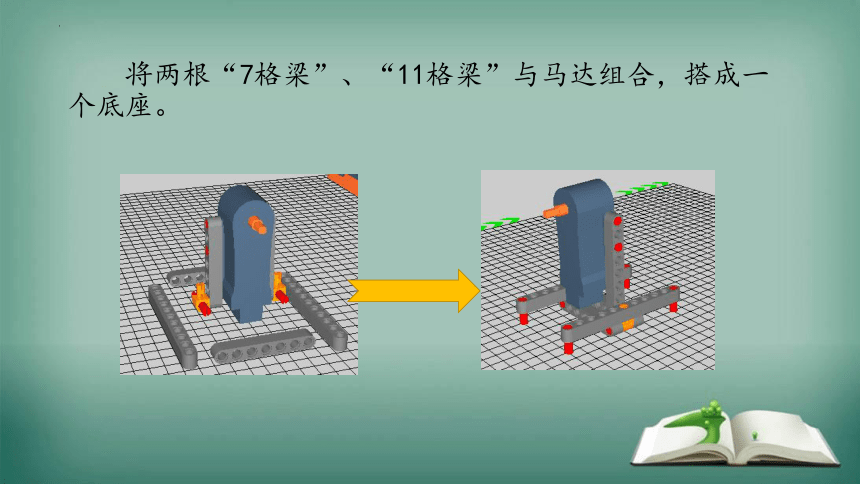
将两根“7格梁”、“11格梁”与马达组合,搭成一个底座。
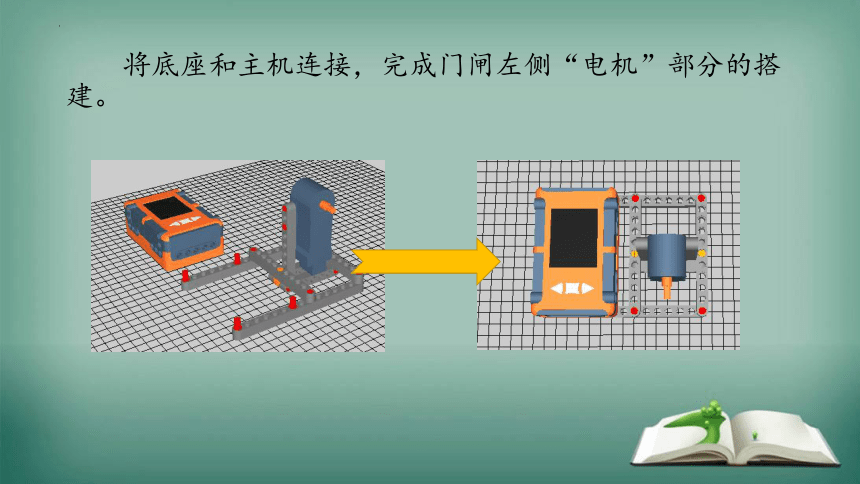
将底座和主机连接,完成门闸左侧“电机”部分的搭建。
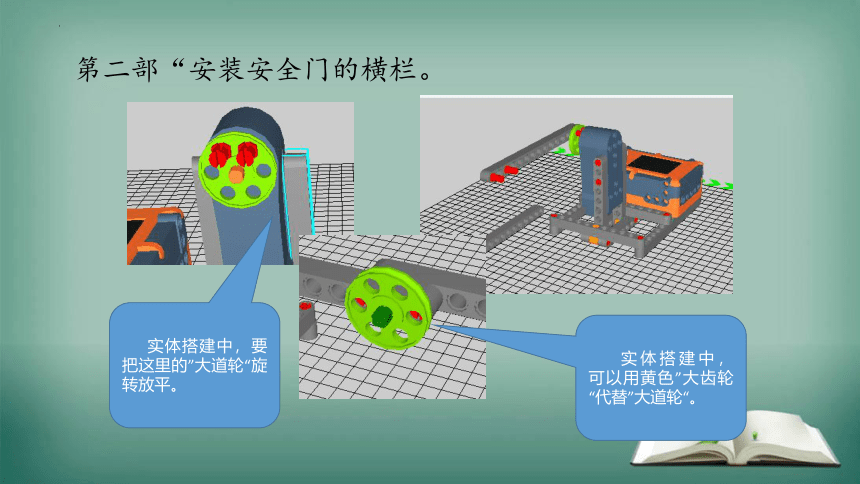
第二部“安装安全门的横栏。
实体搭建中,要把这里的”大道轮“旋转放平。
实体搭建中,可以用黄色”大齿轮“代替”大道轮“。
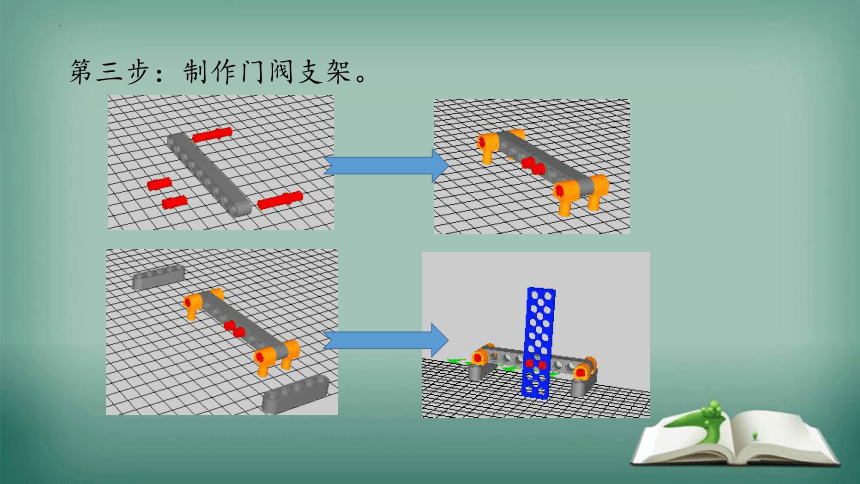
第三步:制作门阀支架。
用两根“7*2角度梁”制作好支架顶端部分。
现在需要将门闸支架和主机连接起来,那么,在虚拟机器人场景中如何整体改变积木方向呢
用鼠标框选住门闸支架整体,然后按右方向键或工具栏“沿着z轴旋转90°”
我们完成了小门闸的搭建工作,现在该研究如何启动它了!
首先,需要在机器人仿真系统里,将马达的端口号参数设置好
设置马达1端口号为
运行机器人快车,进入编程环境,添加一个马达图标。
想一想,马达的速度值设置成多少好呢?
接下来再设置马达运转的时间,这个可以根据实际情况进行调整。
当护栏抬起来之后,需要有一个停顿时间,所以,这就需要让马达停止运行几秒钟。让马达停止运行,可以把它的速度设置为0。
小博士信息港
最后完成门闸护栏抬起的程序。
那么,想让门闸护栏放下,又该怎么做呢?
哈哈!我真聪明啊。其实,只要把前面抬起护栏的程序重复一次,让马达反方向运行就可以让门闸护栏放下了,而且这里我们不需要重复添加程序图标,仅将它们复制之后再进行修改就可以了。最后,将编译代码导人机器人仿真系统里吧。
1.动手搭建一个你想象中的安全门闸。
2.在实体机器人快车中,完成小门闸的编程代码。
第25课 制作安全小门阀
1.掌握机器人积木各部件的整体搭建。
2.会将积木部件进行旋转和组装。
3.会控制马达的运行时间和偏转角度。
为了安全,很多地方都安装有门闸,方便保安检查来往车辆。我们能否利用机器人部件也制作一个安全小门闸呢
让我们一步一步来完成这个小门闸的整体搭建吧。
左右零件相同,对称安装。
第一步:将门闸左侧的“电机”台搭建好。
将两根“7格梁”、“11格梁”与马达组合,搭成一个底座。
将底座和主机连接,完成门闸左侧“电机”部分的搭建。
第二部“安装安全门的横栏。
实体搭建中,要把这里的”大道轮“旋转放平。
实体搭建中,可以用黄色”大齿轮“代替”大道轮“。
第三步:制作门阀支架。
用两根“7*2角度梁”制作好支架顶端部分。
现在需要将门闸支架和主机连接起来,那么,在虚拟机器人场景中如何整体改变积木方向呢
用鼠标框选住门闸支架整体,然后按右方向键或工具栏“沿着z轴旋转90°”
我们完成了小门闸的搭建工作,现在该研究如何启动它了!
首先,需要在机器人仿真系统里,将马达的端口号参数设置好
设置马达1端口号为
运行机器人快车,进入编程环境,添加一个马达图标。
想一想,马达的速度值设置成多少好呢?
接下来再设置马达运转的时间,这个可以根据实际情况进行调整。
当护栏抬起来之后,需要有一个停顿时间,所以,这就需要让马达停止运行几秒钟。让马达停止运行,可以把它的速度设置为0。
小博士信息港
最后完成门闸护栏抬起的程序。
那么,想让门闸护栏放下,又该怎么做呢?
哈哈!我真聪明啊。其实,只要把前面抬起护栏的程序重复一次,让马达反方向运行就可以让门闸护栏放下了,而且这里我们不需要重复添加程序图标,仅将它们复制之后再进行修改就可以了。最后,将编译代码导人机器人仿真系统里吧。
1.动手搭建一个你想象中的安全门闸。
2.在实体机器人快车中,完成小门闸的编程代码。
同课章节目录