人教版八年级物理下册第12章《简单机械》单元测试(word版含答案)
文档属性
| 名称 | 人教版八年级物理下册第12章《简单机械》单元测试(word版含答案) |
|
|
| 格式 | zip | ||
| 文件大小 | 292.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-06-17 00:00:00 | ||
图片预览
文档简介
人教版八年级物理下册第12章《简单机械》单元测试(word版含答案)
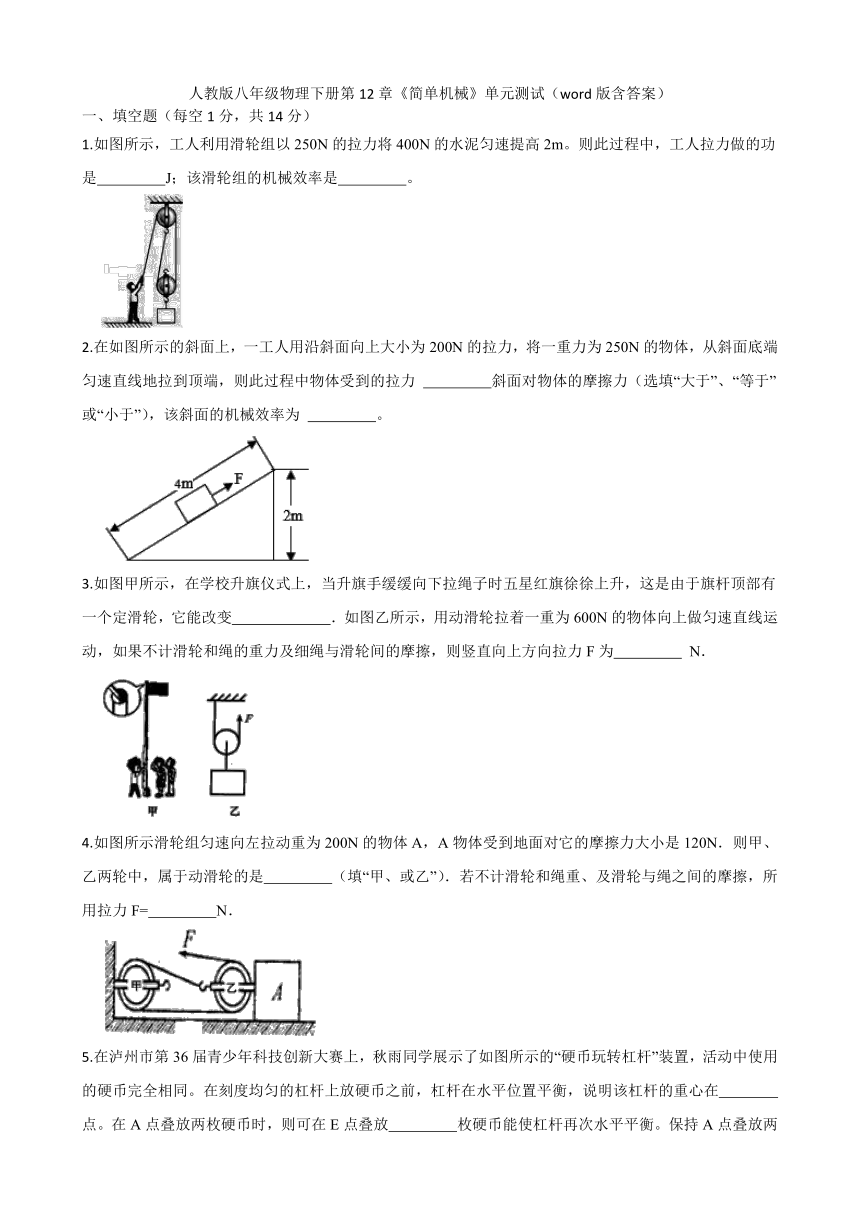
一、填空题(每空1分,共14分)
1.如图所示,工人利用滑轮组以250N的拉力将400N的水泥匀速提高2m。则此过程中,工人拉力做的功是 J;该滑轮组的机械效率是 。
2.在如图所示的斜面上,一工人用沿斜面向上大小为200N的拉力,将一重力为250N的物体,从斜面底端匀速直线地拉到顶端,则此过程中物体受到的拉力 斜面对物体的摩擦力(选填“大于”、“等于”或“小于”),该斜面的机械效率为 。
3.如图甲所示,在学校升旗仪式上,当升旗手缓缓向下拉绳子时五星红旗徐徐上升,这是由于旗杆顶部有一个定滑轮,它能改变 .如图乙所示,用动滑轮拉着一重为600N的物体向上做匀速直线运动,如果不计滑轮和绳的重力及细绳与滑轮间的摩擦,则竖直向上方向拉力F为 N.
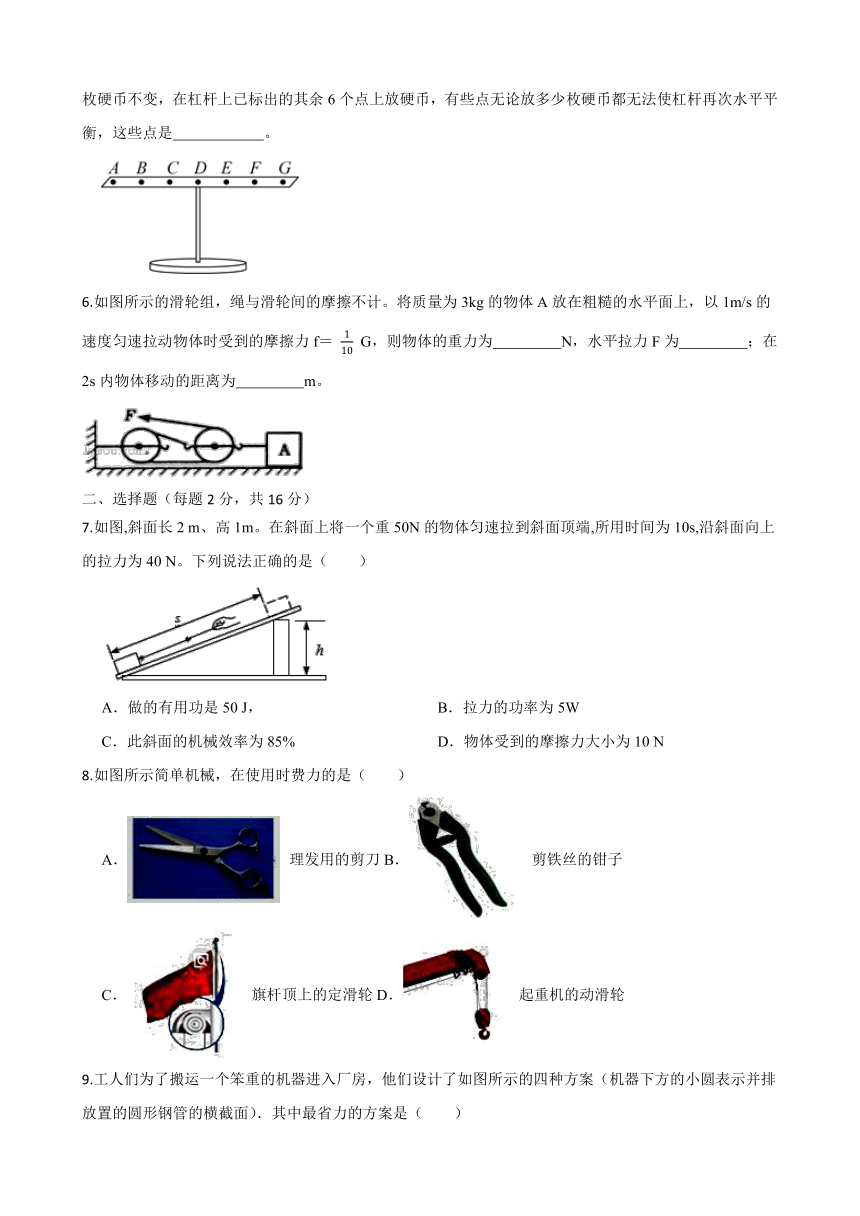
4.如图所示滑轮组匀速向左拉动重为200N的物体A,A物体受到地面对它的摩擦力大小是120N.则甲、乙两轮中,属于动滑轮的是 (填“甲、或乙”).若不计滑轮和绳重、及滑轮与绳之间的摩擦,所用拉力F= N.
5.在泸州市第36届青少年科技创新大赛上,秋雨同学展示了如图所示的“硬币玩转杠杆”装置,活动中使用的硬币完全相同。在刻度均匀的杠杆上放硬币之前,杠杆在水平位置平衡,说明该杠杆的重心在 点。在A点叠放两枚硬币时,则可在E点叠放 枚硬币能使杠杆再次水平平衡。保持A点叠放两枚硬币不变,在杠杆上已标出的其余6个点上放硬币,有些点无论放多少枚硬币都无法使杠杆再次水平平衡,这些点是 。
6.如图所示的滑轮组,绳与滑轮间的摩擦不计。将质量为3kg的物体A放在粗糙的水平面上,以1m/s的速度匀速拉动物体时受到的摩擦力f= G,则物体的重力为 N,水平拉力F为 ;在2s内物体移动的距离为 m。
二、选择题(每题2分,共16分)
7.如图,斜面长2 m、高1m。在斜面上将一个重50N的物体匀速拉到斜面顶端,所用时间为10s,沿斜面向上的拉力为40 N。下列说法正确的是( )
A.做的有用功是50 J, B.拉力的功率为5W
C.此斜面的机械效率为85% D.物体受到的摩擦力大小为10 N
8.如图所示简单机械,在使用时费力的是( )
A. 理发用的剪刀B. 剪铁丝的钳子
C. 旗杆顶上的定滑轮D. 起重机的动滑轮
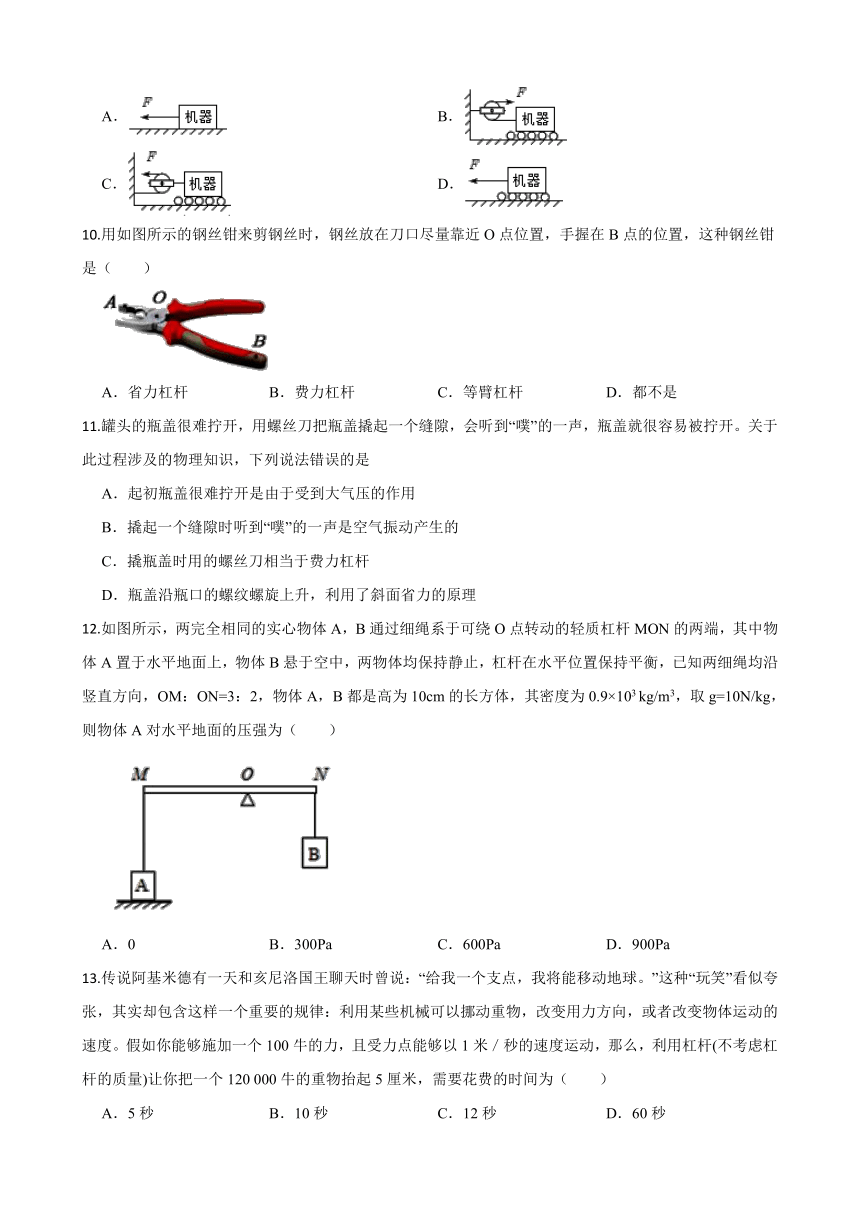
9.工人们为了搬运一个笨重的机器进入厂房,他们设计了如图所示的四种方案(机器下方的小圆表示并排放置的圆形钢管的横截面).其中最省力的方案是( )
A. B.
C. D.
10.用如图所示的钢丝钳来剪钢丝时,钢丝放在刀口尽量靠近O点位置,手握在B点的位置,这种钢丝钳是( )
A.省力杠杆 B.费力杠杆 C.等臂杠杆 D.都不是
11.罐头的瓶盖很难拧开,用螺丝刀把瓶盖撬起一个缝隙,会听到“噗”的一声,瓶盖就很容易被拧开。关于此过程涉及的物理知识,下列说法错误的是
A.起初瓶盖很难拧开是由于受到大气压的作用
B.撬起一个缝隙时听到“噗”的一声是空气振动产生的
C.撬瓶盖时用的螺丝刀相当于费力杠杆
D.瓶盖沿瓶口的螺纹螺旋上升,利用了斜面省力的原理
12.如图所示,两完全相同的实心物体A,B通过细绳系于可绕O点转动的轻质杠杆MON的两端,其中物体A置于水平地面上,物体B悬于空中,两物体均保持静止,杠杆在水平位置保持平衡,已知两细绳均沿竖直方向,OM:ON=3:2,物体A,B都是高为10cm的长方体,其密度为0.9×103 kg/m3,取g=10N/kg,则物体A对水平地面的压强为( )
A.0 B.300Pa C.600Pa D.900Pa
13.传说阿基米德有一天和亥尼洛国王聊天时曾说:“给我一个支点,我将能移动地球。”这种“玩笑”看似夸张,其实却包含这样一个重要的规律:利用某些机械可以挪动重物,改变用力方向,或者改变物体运动的速度。假如你能够施加一个100牛的力,且受力点能够以1米/秒的速度运动,那么,利用杠杆(不考虑杠杆的质量)让你把一个120 000牛的重物抬起5厘米,需要花费的时间为( )
A.5秒 B.10秒 C.12秒 D.60秒
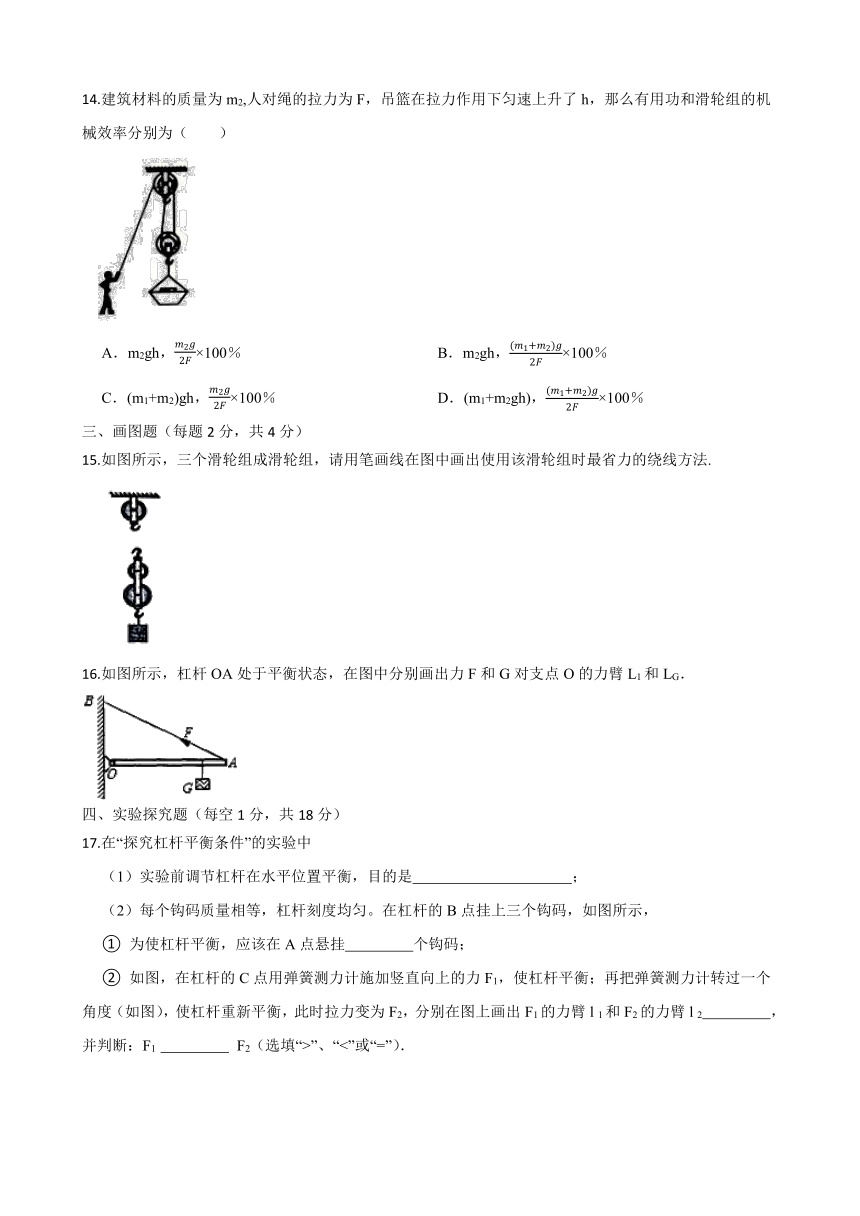
14.建筑材料的质量为m2,人对绳的拉力为F,吊篮在拉力作用下匀速上升了h,那么有用功和滑轮组的机械效率分别为( )
A.m2gh,×100% B.m2gh,×100%
C.(m1+m2)gh,×100% D.(m1+m2gh),×100%
三、画图题(每题2分,共4分)
15.如图所示,三个滑轮组成滑轮组,请用笔画线在图中画出使用该滑轮组时最省力的绕线方法.
16.如图所示,杠杆OA处于平衡状态,在图中分别画出力F和G对支点O的力臂L1和LG.
四、实验探究题(每空1分,共18分)
17.在“探究杠杆平衡条件”的实验中
(1)实验前调节杠杆在水平位置平衡,目的是 ;
(2)每个钩码质量相等,杠杆刻度均匀。在杠杆的B点挂上三个钩码,如图所示,
① 为使杠杆平衡,应该在A点悬挂 个钩码;
② 如图,在杠杆的C点用弹簧测力计施加竖直向上的力F1,使杠杆平衡;再把弹簧测力计转过一个角度(如图),使杠杆重新平衡,此时拉力变为F2,分别在图上画出F1的力臂l 1和F2的力臂l 2 ,并判断:F1 F2(选填“>”、“<”或“=”).
18.在“探究影响滑轮组机械效率的因素”实验中,某实验小组用如图所示的同一滑轮组提升不同钩码的方法,分别做了甲、乙、丙3组实验,实验数据记录如下:
(1)实验操作中应 拉动弹簧测力计;
(2)进行第2次测量时,滑轮组的机械效率约为 ;
(3)进行第3次测量时,弹簧测力计示数为 N,读数时弹簧测力计 选填“应该”或“不应该” 处于静止状态.
(4)分析三次实验数据,得出结论是:滑轮组的机械效率与 有关.
19.如图所示是洋洋和聪聪利用刻度均匀的轻质杠杆探究“杠杆平衡条件”的实验装置。
(1)实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡;
(2)杠杆平衡后,若洋洋在杠杆的左右两侧分别挂上钩码,如图乙所示,则杠杆的 (选填“左”或“右”)端将会下沉,要使杠杆重新在水平位置平衡,在不改变左右两侧钩码个数的前提下,只需将 即可;
(3)洋洋和聪聪又分别设计了两种实验方案,洋洋的方案如图丙所示,聪聪的方案如图丁所示。你认为的实验方案更好 ,请说明你的理由 ; 图中弹簧测力计示数更大一些;
(4)实验中洋洋发现:如果在杠杆的O点用弹簧测力计施加一个向上的力,这个力在探究实验时 (选填“会”或“不会”)影响到杠杆的平衡,请说明理由 。
五、计算题(每题9分,共18分)
20.如图所示,在斜面上用弹簧测力计将一个重4.5N的物体由斜面底端匀速拉到顶端,物体在斜面上匀速运动时受的摩擦力为0.675N,斜面长1.2m,高0.3m。求:
(1)拉力所做的总功为多少?
(2)沿斜面向上的拉力为多少
(3)斜面的机械效率为多少?
21.如图所示是一个压强测试的简化模型。杠杆AB长4m,质量不计,支点为O。A、B两端均悬空,A端挂着一个横截面积为40cm2的物体M,B端连接一个质量分布均匀的实心圆柱体N,N的质量为6kg,横截面积为25cm2。求:
(1)若单独将实心圆柱体N静止放在水平地面上时,它对地面的压强pN为多少?
(2)当传感器C还未放置于物体M的下面时,杠杆在水平位置处于静止状态(如图甲所示),BO=3AO,则物体M受到的重力GM为多少?
(3)如图乙所示,在M下面安装一个压强传感器C(感知M与C之间的压强),C的横截面积为100cm2,将支点O沿水平方向移动一定距离ΔL时,压强传感器的示数为1×104Pa,且杠杆在水平位置处于静止状态,求支点O移动的距离ΔL。
答案
1.1000;80%
2.大于;62.5%
3.力的方向;600
4.乙;40
5.D;6;B、C、D
6.30;1N;2
7.A8.A9.C10.A11.C12.B13.D14.A
15.解:如图所示:
16.如图所示
17.(1)便于测量力臂长度
(2)4;;<
18.(1)竖直匀速 (2) (3);不应该 (4)物重 或钩码重
19.(1)右 (2)左;右侧俩钩码整体向右移动1格
(3)聪聪;力臂在杠杆上方便测力臂;丙 (4)不会;力臂为零不影响杠杆平衡
20.(1)解:因为f=0.675N,s=1.2m,所以克服摩擦做的额外功为:W额=fs=0.675N×1.2m=0.81J;有用功:W有用=Gh=4.5N 0.3m=1.35J, 拉力所做的总功: W总= W有用 W额=1.35J, 0.81J=2.16J
(2)解:因为W总=Fs,所以拉力为:F= =1.8N
(3)解:斜面的机械效率为:η= ×100%= ×100%=62.5%
21.(1)解:由题意可知,实心圆柱体N的质量为mN=6kg,则其重力为GN=mNg=6kg×10N/kg=60N
由受力分析可知,N对地面的压力F压等于N的重力GN,即F压=GN=60N
则由可得,它对地面的压强为
答:它对地面的压强pN为2.4×104N;
(2)解:当杠杆在水平位置处于静止状态时,由杠杆的平衡条件可得GM×OA=GN×OB
解得物体M受到的重力为
答:物体M受到的重力GM为180N;
(3)解:由题意可知,此时M对传感器的压强为pM=1×104Pa,则由F=pS可得,M对传感器的压力为FM=pMSM=1×104Pa×4×10-3m2=40N
由力的作用的相互性可知,传感器对M的支持力为F支=FM=40N
对M受力分析可得,M受到竖直向下的重力GM,竖直向上的传感器的支持力F支和绳子的拉力F拉,M处于受力平衡状态,则由力的平衡可知,绳子对M的拉力为F拉=GM-F支=180N-40N=140N
设此时支点为O′,此时杠杆处于平衡状态,则由杠杆的平衡条件可得F拉×O′A=GN×O′B
解得此时O′A与O′B之间的关系为①
又由题意可知O′A+O′B=4m②
联立①②解得,O′A=1.2m又由题意可得AO+BO=4m③
BO=3AO④
联立③④解得,AO=1m,故可得支点O移动的距离为ΔL=O′A-AO=1.2m-1m=0.2m
答:支点O移动的距离ΔL为0.2m。
一、填空题(每空1分,共14分)
1.如图所示,工人利用滑轮组以250N的拉力将400N的水泥匀速提高2m。则此过程中,工人拉力做的功是 J;该滑轮组的机械效率是 。
2.在如图所示的斜面上,一工人用沿斜面向上大小为200N的拉力,将一重力为250N的物体,从斜面底端匀速直线地拉到顶端,则此过程中物体受到的拉力 斜面对物体的摩擦力(选填“大于”、“等于”或“小于”),该斜面的机械效率为 。
3.如图甲所示,在学校升旗仪式上,当升旗手缓缓向下拉绳子时五星红旗徐徐上升,这是由于旗杆顶部有一个定滑轮,它能改变 .如图乙所示,用动滑轮拉着一重为600N的物体向上做匀速直线运动,如果不计滑轮和绳的重力及细绳与滑轮间的摩擦,则竖直向上方向拉力F为 N.
4.如图所示滑轮组匀速向左拉动重为200N的物体A,A物体受到地面对它的摩擦力大小是120N.则甲、乙两轮中,属于动滑轮的是 (填“甲、或乙”).若不计滑轮和绳重、及滑轮与绳之间的摩擦,所用拉力F= N.
5.在泸州市第36届青少年科技创新大赛上,秋雨同学展示了如图所示的“硬币玩转杠杆”装置,活动中使用的硬币完全相同。在刻度均匀的杠杆上放硬币之前,杠杆在水平位置平衡,说明该杠杆的重心在 点。在A点叠放两枚硬币时,则可在E点叠放 枚硬币能使杠杆再次水平平衡。保持A点叠放两枚硬币不变,在杠杆上已标出的其余6个点上放硬币,有些点无论放多少枚硬币都无法使杠杆再次水平平衡,这些点是 。
6.如图所示的滑轮组,绳与滑轮间的摩擦不计。将质量为3kg的物体A放在粗糙的水平面上,以1m/s的速度匀速拉动物体时受到的摩擦力f= G,则物体的重力为 N,水平拉力F为 ;在2s内物体移动的距离为 m。
二、选择题(每题2分,共16分)
7.如图,斜面长2 m、高1m。在斜面上将一个重50N的物体匀速拉到斜面顶端,所用时间为10s,沿斜面向上的拉力为40 N。下列说法正确的是( )
A.做的有用功是50 J, B.拉力的功率为5W
C.此斜面的机械效率为85% D.物体受到的摩擦力大小为10 N
8.如图所示简单机械,在使用时费力的是( )
A. 理发用的剪刀B. 剪铁丝的钳子
C. 旗杆顶上的定滑轮D. 起重机的动滑轮
9.工人们为了搬运一个笨重的机器进入厂房,他们设计了如图所示的四种方案(机器下方的小圆表示并排放置的圆形钢管的横截面).其中最省力的方案是( )
A. B.
C. D.
10.用如图所示的钢丝钳来剪钢丝时,钢丝放在刀口尽量靠近O点位置,手握在B点的位置,这种钢丝钳是( )
A.省力杠杆 B.费力杠杆 C.等臂杠杆 D.都不是
11.罐头的瓶盖很难拧开,用螺丝刀把瓶盖撬起一个缝隙,会听到“噗”的一声,瓶盖就很容易被拧开。关于此过程涉及的物理知识,下列说法错误的是
A.起初瓶盖很难拧开是由于受到大气压的作用
B.撬起一个缝隙时听到“噗”的一声是空气振动产生的
C.撬瓶盖时用的螺丝刀相当于费力杠杆
D.瓶盖沿瓶口的螺纹螺旋上升,利用了斜面省力的原理
12.如图所示,两完全相同的实心物体A,B通过细绳系于可绕O点转动的轻质杠杆MON的两端,其中物体A置于水平地面上,物体B悬于空中,两物体均保持静止,杠杆在水平位置保持平衡,已知两细绳均沿竖直方向,OM:ON=3:2,物体A,B都是高为10cm的长方体,其密度为0.9×103 kg/m3,取g=10N/kg,则物体A对水平地面的压强为( )
A.0 B.300Pa C.600Pa D.900Pa
13.传说阿基米德有一天和亥尼洛国王聊天时曾说:“给我一个支点,我将能移动地球。”这种“玩笑”看似夸张,其实却包含这样一个重要的规律:利用某些机械可以挪动重物,改变用力方向,或者改变物体运动的速度。假如你能够施加一个100牛的力,且受力点能够以1米/秒的速度运动,那么,利用杠杆(不考虑杠杆的质量)让你把一个120 000牛的重物抬起5厘米,需要花费的时间为( )
A.5秒 B.10秒 C.12秒 D.60秒
14.建筑材料的质量为m2,人对绳的拉力为F,吊篮在拉力作用下匀速上升了h,那么有用功和滑轮组的机械效率分别为( )
A.m2gh,×100% B.m2gh,×100%
C.(m1+m2)gh,×100% D.(m1+m2gh),×100%
三、画图题(每题2分,共4分)
15.如图所示,三个滑轮组成滑轮组,请用笔画线在图中画出使用该滑轮组时最省力的绕线方法.
16.如图所示,杠杆OA处于平衡状态,在图中分别画出力F和G对支点O的力臂L1和LG.
四、实验探究题(每空1分,共18分)
17.在“探究杠杆平衡条件”的实验中
(1)实验前调节杠杆在水平位置平衡,目的是 ;
(2)每个钩码质量相等,杠杆刻度均匀。在杠杆的B点挂上三个钩码,如图所示,
① 为使杠杆平衡,应该在A点悬挂 个钩码;
② 如图,在杠杆的C点用弹簧测力计施加竖直向上的力F1,使杠杆平衡;再把弹簧测力计转过一个角度(如图),使杠杆重新平衡,此时拉力变为F2,分别在图上画出F1的力臂l 1和F2的力臂l 2 ,并判断:F1 F2(选填“>”、“<”或“=”).
18.在“探究影响滑轮组机械效率的因素”实验中,某实验小组用如图所示的同一滑轮组提升不同钩码的方法,分别做了甲、乙、丙3组实验,实验数据记录如下:
(1)实验操作中应 拉动弹簧测力计;
(2)进行第2次测量时,滑轮组的机械效率约为 ;
(3)进行第3次测量时,弹簧测力计示数为 N,读数时弹簧测力计 选填“应该”或“不应该” 处于静止状态.
(4)分析三次实验数据,得出结论是:滑轮组的机械效率与 有关.
19.如图所示是洋洋和聪聪利用刻度均匀的轻质杠杆探究“杠杆平衡条件”的实验装置。
(1)实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡;
(2)杠杆平衡后,若洋洋在杠杆的左右两侧分别挂上钩码,如图乙所示,则杠杆的 (选填“左”或“右”)端将会下沉,要使杠杆重新在水平位置平衡,在不改变左右两侧钩码个数的前提下,只需将 即可;
(3)洋洋和聪聪又分别设计了两种实验方案,洋洋的方案如图丙所示,聪聪的方案如图丁所示。你认为的实验方案更好 ,请说明你的理由 ; 图中弹簧测力计示数更大一些;
(4)实验中洋洋发现:如果在杠杆的O点用弹簧测力计施加一个向上的力,这个力在探究实验时 (选填“会”或“不会”)影响到杠杆的平衡,请说明理由 。
五、计算题(每题9分,共18分)
20.如图所示,在斜面上用弹簧测力计将一个重4.5N的物体由斜面底端匀速拉到顶端,物体在斜面上匀速运动时受的摩擦力为0.675N,斜面长1.2m,高0.3m。求:
(1)拉力所做的总功为多少?
(2)沿斜面向上的拉力为多少
(3)斜面的机械效率为多少?
21.如图所示是一个压强测试的简化模型。杠杆AB长4m,质量不计,支点为O。A、B两端均悬空,A端挂着一个横截面积为40cm2的物体M,B端连接一个质量分布均匀的实心圆柱体N,N的质量为6kg,横截面积为25cm2。求:
(1)若单独将实心圆柱体N静止放在水平地面上时,它对地面的压强pN为多少?
(2)当传感器C还未放置于物体M的下面时,杠杆在水平位置处于静止状态(如图甲所示),BO=3AO,则物体M受到的重力GM为多少?
(3)如图乙所示,在M下面安装一个压强传感器C(感知M与C之间的压强),C的横截面积为100cm2,将支点O沿水平方向移动一定距离ΔL时,压强传感器的示数为1×104Pa,且杠杆在水平位置处于静止状态,求支点O移动的距离ΔL。
答案
1.1000;80%
2.大于;62.5%
3.力的方向;600
4.乙;40
5.D;6;B、C、D
6.30;1N;2
7.A8.A9.C10.A11.C12.B13.D14.A
15.解:如图所示:
16.如图所示
17.(1)便于测量力臂长度
(2)4;;<
18.(1)竖直匀速 (2) (3);不应该 (4)物重 或钩码重
19.(1)右 (2)左;右侧俩钩码整体向右移动1格
(3)聪聪;力臂在杠杆上方便测力臂;丙 (4)不会;力臂为零不影响杠杆平衡
20.(1)解:因为f=0.675N,s=1.2m,所以克服摩擦做的额外功为:W额=fs=0.675N×1.2m=0.81J;有用功:W有用=Gh=4.5N 0.3m=1.35J, 拉力所做的总功: W总= W有用 W额=1.35J, 0.81J=2.16J
(2)解:因为W总=Fs,所以拉力为:F= =1.8N
(3)解:斜面的机械效率为:η= ×100%= ×100%=62.5%
21.(1)解:由题意可知,实心圆柱体N的质量为mN=6kg,则其重力为GN=mNg=6kg×10N/kg=60N
由受力分析可知,N对地面的压力F压等于N的重力GN,即F压=GN=60N
则由可得,它对地面的压强为
答:它对地面的压强pN为2.4×104N;
(2)解:当杠杆在水平位置处于静止状态时,由杠杆的平衡条件可得GM×OA=GN×OB
解得物体M受到的重力为
答:物体M受到的重力GM为180N;
(3)解:由题意可知,此时M对传感器的压强为pM=1×104Pa,则由F=pS可得,M对传感器的压力为FM=pMSM=1×104Pa×4×10-3m2=40N
由力的作用的相互性可知,传感器对M的支持力为F支=FM=40N
对M受力分析可得,M受到竖直向下的重力GM,竖直向上的传感器的支持力F支和绳子的拉力F拉,M处于受力平衡状态,则由力的平衡可知,绳子对M的拉力为F拉=GM-F支=180N-40N=140N
设此时支点为O′,此时杠杆处于平衡状态,则由杠杆的平衡条件可得F拉×O′A=GN×O′B
解得此时O′A与O′B之间的关系为①
又由题意可知O′A+O′B=4m②
联立①②解得,O′A=1.2m又由题意可得AO+BO=4m③
BO=3AO④
联立③④解得,AO=1m,故可得支点O移动的距离为ΔL=O′A-AO=1.2m-1m=0.2m
答:支点O移动的距离ΔL为0.2m。