第8课机器人快递员课件(9PPT)-六年级下册信息技术浙江摄影版(三起)
文档属性
| 名称 | 第8课机器人快递员课件(9PPT)-六年级下册信息技术浙江摄影版(三起) |

|
|
| 格式 | zip | ||
| 文件大小 | 1.8MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙摄影版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2022-06-27 00:00:00 | ||
图片预览

文档简介
(共9张PPT)
机器人快递员
--智能送餐机器人
教学目标
知识技能目标:掌握乐高机器人两个光电传感器巡线的程序算法,明确光电传感器的安装位置及端口对应,学会循环、开关嵌套的设计方法以及4种情况的电机进行参数设置。尝试在不断调试中找到模块参数与机器人运行的最佳匹配设置。
过程方法目标:通过实际问题情境,凸显新旧知识的功能差异,在解决问题过程中提升学生的知识迁移能力、合作搭建机器人解决问题能力及创新编程设计能力。
情感态度目标:通过问题情境设计,创设主动学习、主动思考、协作交流的学习氛围,在动手实践中收获快乐,在编程设计中体验成功,养成热爱科学、勇于创新的良好品质。
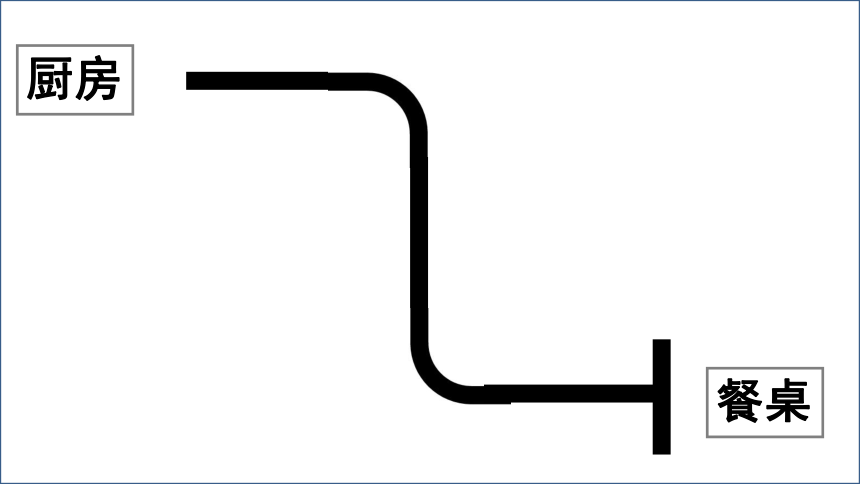
厨房
餐桌
任务一:
利用两个光电传感器,设计走得稳,停得准的巡线机器人。
双
光感巡线编程要点
双光电传感器分别测准光值
左右电机状态匹配
电机运行速度适中
程序端口与搭建端口对应
任务二:
机器人送餐大比拼:
比一比,看哪个组设计的机器人送餐走得更稳、停得更准。
送餐评价表
1. 成功利用双光电传感器,设计出巡线机器人。
2. 机器人服务员行走平稳。
3. 机器人把菜送到餐桌时能够停下来。
4. 机器人支架搭建稳固、程序设计有创新。
谢谢!
机器人快递员
--智能送餐机器人
教学目标
知识技能目标:掌握乐高机器人两个光电传感器巡线的程序算法,明确光电传感器的安装位置及端口对应,学会循环、开关嵌套的设计方法以及4种情况的电机进行参数设置。尝试在不断调试中找到模块参数与机器人运行的最佳匹配设置。
过程方法目标:通过实际问题情境,凸显新旧知识的功能差异,在解决问题过程中提升学生的知识迁移能力、合作搭建机器人解决问题能力及创新编程设计能力。
情感态度目标:通过问题情境设计,创设主动学习、主动思考、协作交流的学习氛围,在动手实践中收获快乐,在编程设计中体验成功,养成热爱科学、勇于创新的良好品质。
厨房
餐桌
任务一:
利用两个光电传感器,设计走得稳,停得准的巡线机器人。
双
光感巡线编程要点
双光电传感器分别测准光值
左右电机状态匹配
电机运行速度适中
程序端口与搭建端口对应
任务二:
机器人送餐大比拼:
比一比,看哪个组设计的机器人送餐走得更稳、停得更准。
送餐评价表
1. 成功利用双光电传感器,设计出巡线机器人。
2. 机器人服务员行走平稳。
3. 机器人把菜送到餐桌时能够停下来。
4. 机器人支架搭建稳固、程序设计有创新。
谢谢!