电力拖动技术课件(37张幻灯片)
图片预览


文档简介
课件37张PPT。电力拖动基础 第一章
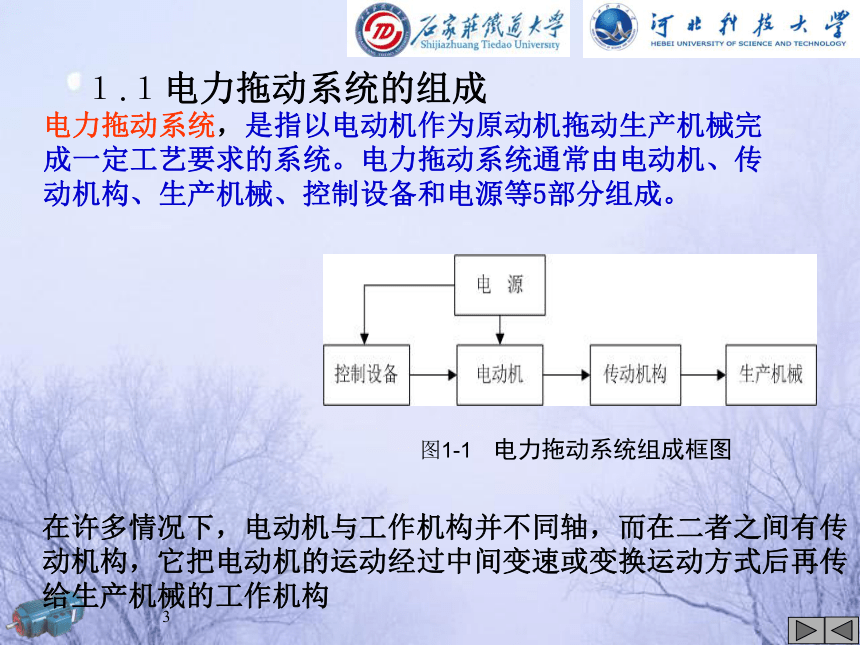
电力拖动系统的动力学基础1 本章主要介绍电力拖动系统的构成、电力拖动系统的运动方程式、生产机械的负载转矩特性以及电力拖动系统稳定运行的条件。1 1.1电力拖动系统的组成电力拖动系统,是指以电动机作为原动机拖动生产机械完成一定工艺要求的系统。电力拖动系统通常由电动机、传动机构、生产机械、控制设备和电源等5部分组成。 图1-1 电力拖动系统组成框图在许多情况下,电动机与工作机构并不同轴,而在二者之间有传动机构,它把电动机的运动经过中间变速或变换运动方式后再传给生产机械的工作机构 11.2 电力拖动系统的运动方程式2.1.1 单轴系统的运动方程式 图1-2 单轴电力拖动系统 图中:1 根据刚体转动定律 ,可写出单轴系统的运动方程式: 式中:J ___转动部分的转动惯量 , (包括电动机的转动惯量和生产机械的转动惯量,单位为kg.m2 )
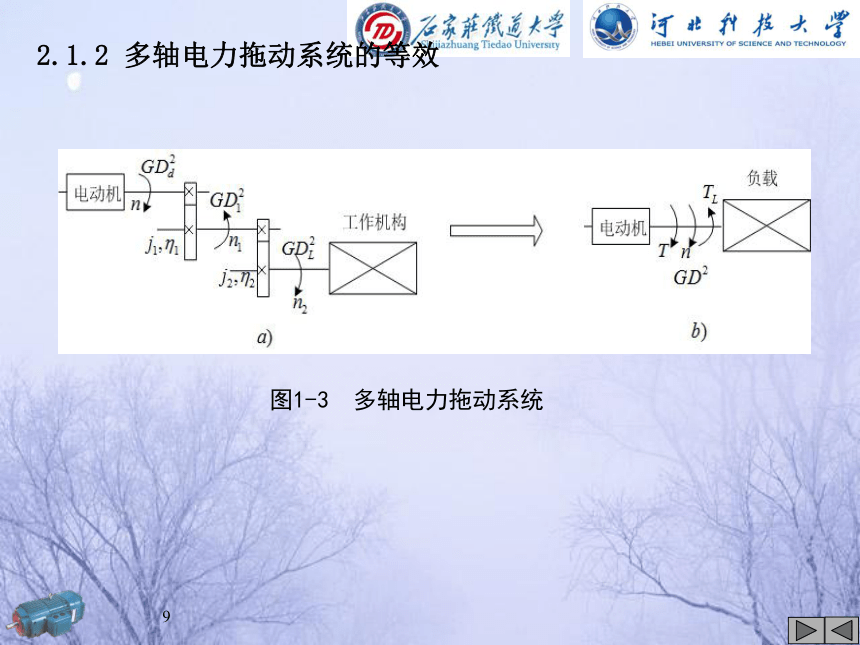
Ω ___为电动机的机械角速度(单位为rad/s)。 1又因为所以, 单轴系统运动方程式的实用形式:注意:(1)GD2是表征转动系统惯性的完整概念,不能简单地理解为两者的乘积。1由运动方程式可知,系统有的三种运行状态 电力拖动系统运动方程式描述了系统的运动状态,而系统的运动状态取决于作用在原动机转轴上的各种转矩。1注意:运动方程式针对的是单轴拖动系统,对于多轴拖动系统,要将多轴系统等效为一单轴系统 。运动方程式中转矩正、负号的规定 首先确定电动机某一电动状态时转速的方向为系统旋转正方向,然后规定:12.1.2 多轴电力拖动系统的等效 图1-3 多轴电力拖动系统 1折算原则:折算前后系统所传送的功率及所储存的动能不变。折算包括:负载转矩的折算和飞轮矩的折算 负载转矩的折算是从系统已知的实际负载转矩计算出折算到电动机轴上的等效负载转矩。 飞轮矩的折算是从已知的各传动轴上的飞轮矩计算出折算到电动轴上的总飞轮矩。 由于这两种折算随生产机械工作机构运动形式的不同而不同,下面分三种情况来进行讨论。1 (1)负载转矩的折算1.工作机构旋转运动时转矩与飞轮矩的折算 (1-5) ,相应的角速度为Ω,则折算到电动机轴上的功率为 PL为(1-6) 1 若忽略传动机构的功率损耗,按照折算前、后功率不变的原则,于是有 (1-8) (1-7) 式中, 在多级传动机构中,它等于各级传动轴转速比的乘积,即 1 实际上,在机械功率的传递过程中,传动机构存在着功率损耗,称为传动损耗。传动损耗可以用传动机构的效率η来描述。 传动损耗到底是由电动机承担还是由生产机械承担,取决于
功率传递的方向。 当电动机工作在电动状态时,功率传递方向是从电动机流向生产机械,传动损耗由电动机承担。此时,按照折算前、后传递功率不变的原则,折算后的负载转矩为:(1-10) 1 当电动机工作在发电制动状态时,功率传递方向是由生产机械流向电动机,此时传动损耗由生产机械承担。按照折算前、后传递功率不变的原则,折算后的负载转矩为:(1-12) 注意,式(1-10) 和式(1-12)中,η为传动机构的总效率。
1 (2)飞轮矩的折算 按照折算前后系统储存动能不变的原则,有: 所以,折算后的等效转动惯量J为:1式中, (1-16) 由式(1-16)可知,各级飞轮矩折算到电动机轴上时,应
除以电动机与该级之间转速比的平方。因此,飞轮矩折算的
一般形式为:12.工作机构平移运动时转矩与飞轮矩的折算图1-4 龙门刨床传动机构示意图 1 (1)负载转矩的折算设切削时图1-4中工作台与工件的平移速度为v(单位为m/s) ,工作机构做平移运动时受到的阻力(切削力)F为(单位为N),则切削功率(单位为W)为 依据折算前、后功率不变的原则,若不考虑传动损耗,则有: 于是,当考虑传动损耗时, 1 (2)飞轮矩的折算 设平移物体折算至电动机轴上的转动惯量为 于是,平移物体折算到电动机轴上的飞轮矩为: ,其重量 ,所产生的动能为 ,则: 13.工作机构做升降运动时转矩与飞轮矩的折算 图1-5 起重机电力拖动示意图1 (1)负载转矩的折算 由于负载转矩的折算与功率传递方向密切相关,因此,提升重物和下放重物时负载转矩的折算值不同,需分别进行分析。 假设重物的重量为G=mg,提升重物和下放重物时的速度均为v,卷筒半径为R,总转速比为j。当考虑传动损耗时, ① 提升重物 提升重物时,作用在卷筒轴上的负载转矩为GR,若不计传动
机构损耗,则折算到电动机轴上的负载转矩TL为:1当考虑传动损耗时, ② 下放重物 下放重物时,作用在卷筒轴上的负载转矩仍为GR,若不计传动
机构损耗,则折算到电动机轴上的负载转矩TL仍为:当对同一重物提升和下放时,可认为传动机构的损耗相等,则 1 (2)飞轮矩的折算 由于升降运动和平移运动都属于直线运动,所以其飞轮矩的
折算方法与平移运动相同。 时,重物的上升速度为 ,电动机转子的转动惯量为 , 卷筒直径 , 卷筒的转动惯量 , 减速机构的转动惯量和钢绳质量可以忽略不计,传动机构的效率 =0.95。试求: 使重物匀速上升时电动机转子轴上的输出转矩;(2)整个系统
折算到电动机轴上的总飞轮矩;(3) 使重物以1m/s2的加速度上升
时电动机转子轴上的输出转矩。 1解:(1) 当重物匀速上升时,电动机转子轴上的输出转矩与折算到电动机轴上的负载转矩相等。按照功率传递方向,于是有(2) 根据题意,卷筒的转速为由于传动机构的总转速比j为1所以折算到电动机转子轴上的总飞轮矩为:(3) 考虑到电动机的转速与提升重物速度之间的关系 于是电动机的加速度与提升重物时的加速度之间的关系为 1 因此,当重物以1m/s2的加速度上升时电动机转子轴上的输出转矩为: 1 1.3 负载的机械特性
n = f (TL)
转速和转矩的参考方向: 1. 恒转矩负载特性
(1) 反抗性恒转矩负载 由摩擦力产生的。
当 n>0, TL>0。
当 n< 0,TL<0。
如机床平移机构、
压延设备等。1(2) 位能性恒转矩负载 由重力作用产生的。
当 n>0, TL>0。
当 n< 0,TL>0。
如起重机的提升机构
和矿井卷扬机等。
2. 恒功率负载特性 TL n = 常数。
如机床的主轴系统等。13. 通风机负载特性 TL∝n2
TL 的方向始终与 n 的方向相反。
如通风机、水泵、油泵等。实际的通风机负载T0TL = T0+k n2 实际的机床平移机构11.4 电力拖动系统稳定运行的条件工作点:在电动机的机械特性与负载
的机械特性的交点上。稳定运行:即:Te-TL = 0运动方程:Te-TL> 0→加速Te-TL< 0→减速n = 常数过渡过程:1a 干扰使 TL ? a 点: n ? → Te ?a'→ a'点。 → a 点。 →n ? →Te ? 干扰过后 Te>TL →Te= TL 1aa" 干扰使 TL ? a 点: n ? → Te ? → a'点。 干扰过后 Te>TL →n ? →T e? →Te = TL → a 点。 干扰使 TL ? →Te ? → a" 点。 →Te = TL干扰过后 Te<TL → n ? → Te ? →Te = TL → a 点。 1b 点: 干扰使 TL ? →n ? →n = 0 →堵转。 →Te ? 干扰过后 Te <TL ,不能运行。 b'1b 点: 干扰使 TL ? n? →Te? → n? → n = 0 →堵转。 干扰过后 Te <TL ,不能运行。(不能回到b点) 干扰使 TL ? →Te ? → b' 点。 → n ?? b'干扰过后 Te<TL →n ? → T ? → a 点(不能回到b点)。 1 稳定运行的充分条件: 稳定运行点 不稳定
运行点 1 电动机的自适应负载能力 电动机的电磁转矩可以随负载的变化而自动
调整这种能力称为自适应负载能力。 自适应负载能力是电动机
区别于其他动力机械的重要
特点。
如:柴油机当负载增加时,
必须由操作者加大油门,
才能带动新的负载。a 点→TL? 新的平衡 →a'点a'Te-TL<0→n? →I2? →Te? I1?→P1? 1练 习 题* 以教师画勾的题为准。1
电力拖动系统的动力学基础1 本章主要介绍电力拖动系统的构成、电力拖动系统的运动方程式、生产机械的负载转矩特性以及电力拖动系统稳定运行的条件。1 1.1电力拖动系统的组成电力拖动系统,是指以电动机作为原动机拖动生产机械完成一定工艺要求的系统。电力拖动系统通常由电动机、传动机构、生产机械、控制设备和电源等5部分组成。 图1-1 电力拖动系统组成框图在许多情况下,电动机与工作机构并不同轴,而在二者之间有传动机构,它把电动机的运动经过中间变速或变换运动方式后再传给生产机械的工作机构 11.2 电力拖动系统的运动方程式2.1.1 单轴系统的运动方程式 图1-2 单轴电力拖动系统 图中:1 根据刚体转动定律 ,可写出单轴系统的运动方程式: 式中:J ___转动部分的转动惯量 , (包括电动机的转动惯量和生产机械的转动惯量,单位为kg.m2 )
Ω ___为电动机的机械角速度(单位为rad/s)。 1又因为所以, 单轴系统运动方程式的实用形式:注意:(1)GD2是表征转动系统惯性的完整概念,不能简单地理解为两者的乘积。1由运动方程式可知,系统有的三种运行状态 电力拖动系统运动方程式描述了系统的运动状态,而系统的运动状态取决于作用在原动机转轴上的各种转矩。1注意:运动方程式针对的是单轴拖动系统,对于多轴拖动系统,要将多轴系统等效为一单轴系统 。运动方程式中转矩正、负号的规定 首先确定电动机某一电动状态时转速的方向为系统旋转正方向,然后规定:12.1.2 多轴电力拖动系统的等效 图1-3 多轴电力拖动系统 1折算原则:折算前后系统所传送的功率及所储存的动能不变。折算包括:负载转矩的折算和飞轮矩的折算 负载转矩的折算是从系统已知的实际负载转矩计算出折算到电动机轴上的等效负载转矩。 飞轮矩的折算是从已知的各传动轴上的飞轮矩计算出折算到电动轴上的总飞轮矩。 由于这两种折算随生产机械工作机构运动形式的不同而不同,下面分三种情况来进行讨论。1 (1)负载转矩的折算1.工作机构旋转运动时转矩与飞轮矩的折算 (1-5) ,相应的角速度为Ω,则折算到电动机轴上的功率为 PL为(1-6) 1 若忽略传动机构的功率损耗,按照折算前、后功率不变的原则,于是有 (1-8) (1-7) 式中, 在多级传动机构中,它等于各级传动轴转速比的乘积,即 1 实际上,在机械功率的传递过程中,传动机构存在着功率损耗,称为传动损耗。传动损耗可以用传动机构的效率η来描述。 传动损耗到底是由电动机承担还是由生产机械承担,取决于
功率传递的方向。 当电动机工作在电动状态时,功率传递方向是从电动机流向生产机械,传动损耗由电动机承担。此时,按照折算前、后传递功率不变的原则,折算后的负载转矩为:(1-10) 1 当电动机工作在发电制动状态时,功率传递方向是由生产机械流向电动机,此时传动损耗由生产机械承担。按照折算前、后传递功率不变的原则,折算后的负载转矩为:(1-12) 注意,式(1-10) 和式(1-12)中,η为传动机构的总效率。
1 (2)飞轮矩的折算 按照折算前后系统储存动能不变的原则,有: 所以,折算后的等效转动惯量J为:1式中, (1-16) 由式(1-16)可知,各级飞轮矩折算到电动机轴上时,应
除以电动机与该级之间转速比的平方。因此,飞轮矩折算的
一般形式为:12.工作机构平移运动时转矩与飞轮矩的折算图1-4 龙门刨床传动机构示意图 1 (1)负载转矩的折算设切削时图1-4中工作台与工件的平移速度为v(单位为m/s) ,工作机构做平移运动时受到的阻力(切削力)F为(单位为N),则切削功率(单位为W)为 依据折算前、后功率不变的原则,若不考虑传动损耗,则有: 于是,当考虑传动损耗时, 1 (2)飞轮矩的折算 设平移物体折算至电动机轴上的转动惯量为 于是,平移物体折算到电动机轴上的飞轮矩为: ,其重量 ,所产生的动能为 ,则: 13.工作机构做升降运动时转矩与飞轮矩的折算 图1-5 起重机电力拖动示意图1 (1)负载转矩的折算 由于负载转矩的折算与功率传递方向密切相关,因此,提升重物和下放重物时负载转矩的折算值不同,需分别进行分析。 假设重物的重量为G=mg,提升重物和下放重物时的速度均为v,卷筒半径为R,总转速比为j。当考虑传动损耗时, ① 提升重物 提升重物时,作用在卷筒轴上的负载转矩为GR,若不计传动
机构损耗,则折算到电动机轴上的负载转矩TL为:1当考虑传动损耗时, ② 下放重物 下放重物时,作用在卷筒轴上的负载转矩仍为GR,若不计传动
机构损耗,则折算到电动机轴上的负载转矩TL仍为:当对同一重物提升和下放时,可认为传动机构的损耗相等,则 1 (2)飞轮矩的折算 由于升降运动和平移运动都属于直线运动,所以其飞轮矩的
折算方法与平移运动相同。 时,重物的上升速度为 ,电动机转子的转动惯量为 , 卷筒直径 , 卷筒的转动惯量 , 减速机构的转动惯量和钢绳质量可以忽略不计,传动机构的效率 =0.95。试求: 使重物匀速上升时电动机转子轴上的输出转矩;(2)整个系统
折算到电动机轴上的总飞轮矩;(3) 使重物以1m/s2的加速度上升
时电动机转子轴上的输出转矩。 1解:(1) 当重物匀速上升时,电动机转子轴上的输出转矩与折算到电动机轴上的负载转矩相等。按照功率传递方向,于是有(2) 根据题意,卷筒的转速为由于传动机构的总转速比j为1所以折算到电动机转子轴上的总飞轮矩为:(3) 考虑到电动机的转速与提升重物速度之间的关系 于是电动机的加速度与提升重物时的加速度之间的关系为 1 因此,当重物以1m/s2的加速度上升时电动机转子轴上的输出转矩为: 1 1.3 负载的机械特性
n = f (TL)
转速和转矩的参考方向: 1. 恒转矩负载特性
(1) 反抗性恒转矩负载 由摩擦力产生的。
当 n>0, TL>0。
当 n< 0,TL<0。
如机床平移机构、
压延设备等。1(2) 位能性恒转矩负载 由重力作用产生的。
当 n>0, TL>0。
当 n< 0,TL>0。
如起重机的提升机构
和矿井卷扬机等。
2. 恒功率负载特性 TL n = 常数。
如机床的主轴系统等。13. 通风机负载特性 TL∝n2
TL 的方向始终与 n 的方向相反。
如通风机、水泵、油泵等。实际的通风机负载T0TL = T0+k n2 实际的机床平移机构11.4 电力拖动系统稳定运行的条件工作点:在电动机的机械特性与负载
的机械特性的交点上。稳定运行:即:Te-TL = 0运动方程:Te-TL> 0→加速Te-TL< 0→减速n = 常数过渡过程:1a 干扰使 TL ? a 点: n ? → Te ?a'→ a'点。 → a 点。 →n ? →Te ? 干扰过后 Te>TL →Te= TL 1aa" 干扰使 TL ? a 点: n ? → Te ? → a'点。 干扰过后 Te>TL →n ? →T e? →Te = TL → a 点。 干扰使 TL ? →Te ? → a" 点。 →Te = TL干扰过后 Te<TL → n ? → Te ? →Te = TL → a 点。 1b 点: 干扰使 TL ? →n ? →n = 0 →堵转。 →Te ? 干扰过后 Te <TL ,不能运行。 b'1b 点: 干扰使 TL ? n? →Te? → n? → n = 0 →堵转。 干扰过后 Te <TL ,不能运行。(不能回到b点) 干扰使 TL ? →Te ? → b' 点。 → n ?? b'干扰过后 Te<TL →n ? → T ? → a 点(不能回到b点)。 1 稳定运行的充分条件: 稳定运行点 不稳定
运行点 1 电动机的自适应负载能力 电动机的电磁转矩可以随负载的变化而自动
调整这种能力称为自适应负载能力。 自适应负载能力是电动机
区别于其他动力机械的重要
特点。
如:柴油机当负载增加时,
必须由操作者加大油门,
才能带动新的负载。a 点→TL? 新的平衡 →a'点a'Te-TL<0→n? →I2? →Te? I1?→P1? 1练 习 题* 以教师画勾的题为准。1
同课章节目录