新川教版(2019)信息技术九年级下册 第1单元 认识未来城市中的机器人 知识点+练习(学生版+解析版)
文档属性
| 名称 | 新川教版(2019)信息技术九年级下册 第1单元 认识未来城市中的机器人 知识点+练习(学生版+解析版) |
|
|
| 格式 | |||
| 文件大小 | 1.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 川教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2022-07-14 00:00:00 | ||
图片预览



文档简介
九年级下册
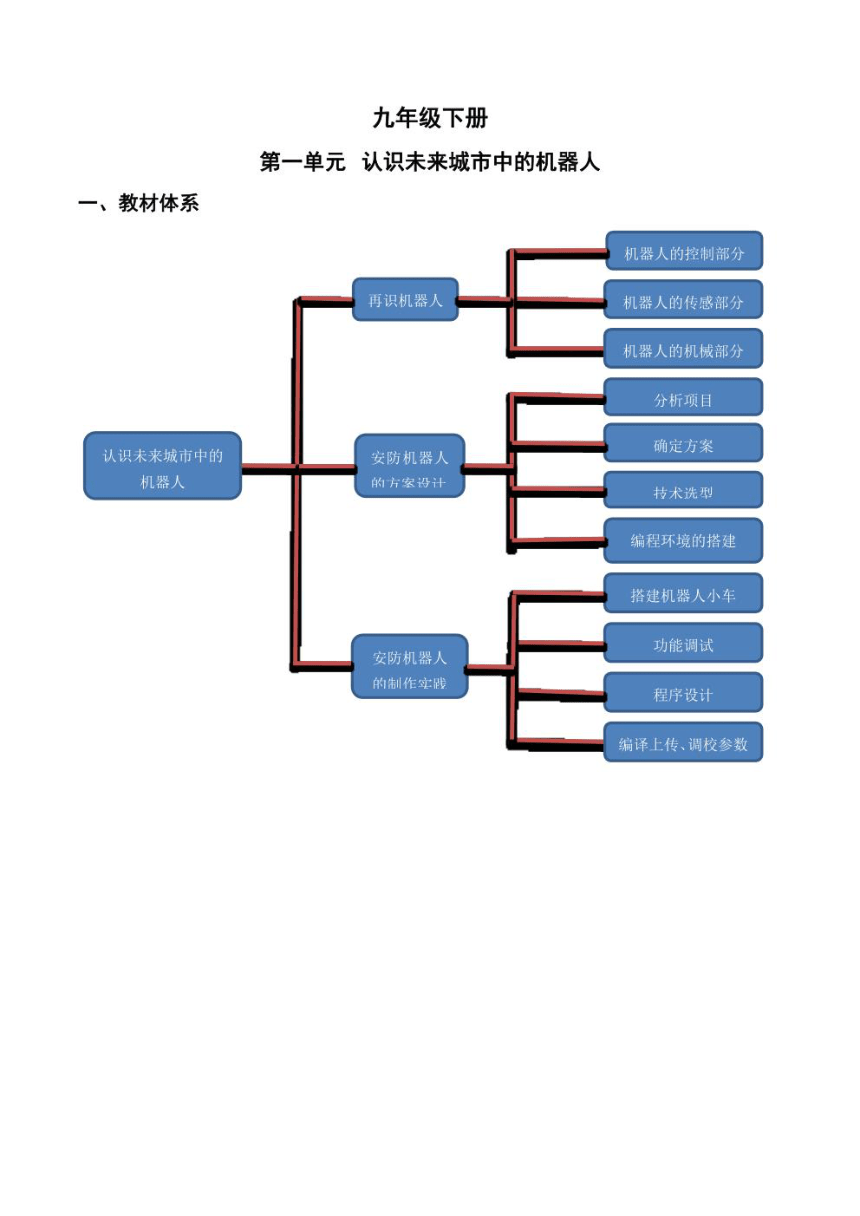
第一单元认识未来城市中的机器人
一、教材体系
机器人的控制部分
再识机器人
机器人的传感部分
机器人的机械部分
分析项目
认识未来城市中的
确定方案
安防机器人
机器人
的方室设计
技术选型
编程环境的搭建
搭建机器人小车
功能调试
安防机器人
的制作实践
程序设计
编译上传、调校参数
二、知识点
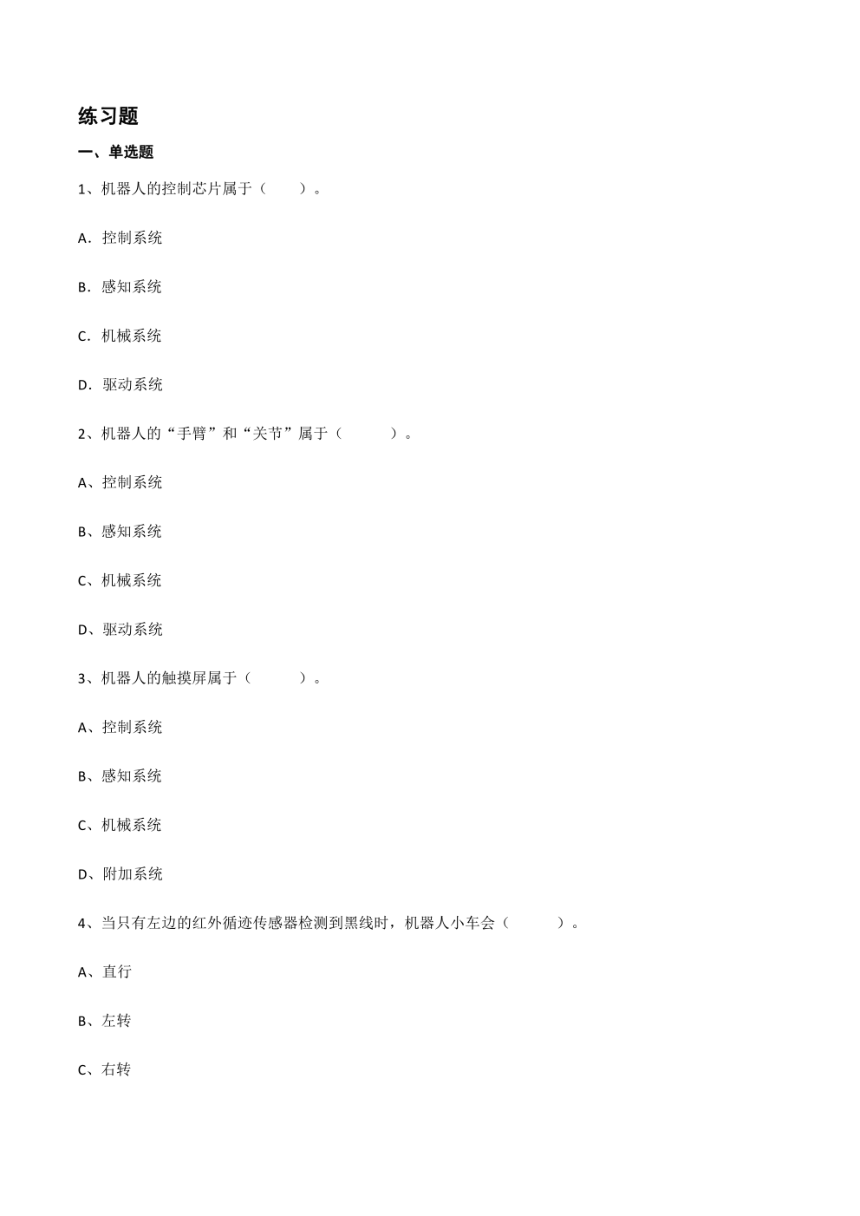
1.了解机器人的基本组成和工作原理。
机器人由控制部分、传感部分和机械部分组成。
控制部分由控制系统和人机交互系统组成。控制系统由控制芯片及外围电路组成。控制器接收到信息,经
过运算转化为指令,驱使机器人完成指定任务和动作;人机交互系统主要通过控制程序来实现。
传感部分由感知系统与“机器人一一环境”交互系统组成,主要为了感知自身状态或获取外部特定信息,为
控制部分提供运算、判断的数据。
机械部分由机械系统与驱动系统组成。机械系统由运动部件的装置构成,如轮子、履带、螺旋桨等:驱动
系统由驱动机械系统里各运动部件工作的装置构成,如电动机、气缸等。
2.了解常见中小学教育机器人的控制开发平台和编程环境。
常见中小学教育机器人控制系统的开发平台:Arduino系列开发板、51单片机开发板、STM32单片机开发板、
Raspberry Pi(树莓派)。
常见编程环境:Arduino IDE、Keil uVersion、Keil MDK、BlueJ。
3.了解安防机器人的工作特点。
(1)定线(即沿着黑线巡逻)
(2)不定向(可以直行、左转、右转)
4.学会设计中小学教育机器人的一般方法。
(1)分析项目
(2)确定方案
(3)技术选型
(4)绵程环境的搭建
5掌握超声波传感器、红外循迹传感器的工作原理。
超声波传感器一般有两个探头,一个是超声波发射端,一个是超声波接收端。其工作原理是利用超声波碰
到障碍物会产生显著的反射,形成反射回波,通过公式s=(340xt)/2计算出小车与障碍物反射面之间的距离,
从而控制小车停车或避开障碍物。
红外循迹传感器有一个发射管和一个接收管组成,发射管发射出的红外光遇到黑色物体时,会被吸收,这
时,接收管就接收不到反射回来的红外光,红外循迹传感器就输出高电平:发射管发射出的红外光遇到白
色物体时,不会被吸收,这时,接收管就能接收到反射回来的红外光,红外循迹传感器就输出低电平,小
车以此对路面黑色轨迹进行检测,从而控制小车运动路线。
6.能设计、搭建机器人小车,掌握机器人系统的接线方法。
(1)确立搭建要求
(2)搭建机器人小车
(3)系统接线
7能根据机器人小车的功能需求,设计流程图。
(1)机器人小车工作流程图
(2)循迹流程图
(3)不同类型路口检测编程流程图
8能根据流程图编写程序,实现机器人小车的各项功能。
(1)设计并声明相关变量
(2)直流电机运行模块函数
(3)遇障碍提示程序
(4)逻辑判断
(5)组合各功能程序模块
第一单元认识未来城市中的机器人
一、教材体系
机器人的控制部分
再识机器人
机器人的传感部分
机器人的机械部分
分析项目
认识未来城市中的
确定方案
安防机器人
机器人
的方室设计
技术选型
编程环境的搭建
搭建机器人小车
功能调试
安防机器人
的制作实践
程序设计
编译上传、调校参数
二、知识点
1.了解机器人的基本组成和工作原理。
机器人由控制部分、传感部分和机械部分组成。
控制部分由控制系统和人机交互系统组成。控制系统由控制芯片及外围电路组成。控制器接收到信息,经
过运算转化为指令,驱使机器人完成指定任务和动作;人机交互系统主要通过控制程序来实现。
传感部分由感知系统与“机器人一一环境”交互系统组成,主要为了感知自身状态或获取外部特定信息,为
控制部分提供运算、判断的数据。
机械部分由机械系统与驱动系统组成。机械系统由运动部件的装置构成,如轮子、履带、螺旋桨等:驱动
系统由驱动机械系统里各运动部件工作的装置构成,如电动机、气缸等。
2.了解常见中小学教育机器人的控制开发平台和编程环境。
常见中小学教育机器人控制系统的开发平台:Arduino系列开发板、51单片机开发板、STM32单片机开发板、
Raspberry Pi(树莓派)。
常见编程环境:Arduino IDE、Keil uVersion、Keil MDK、BlueJ。
3.了解安防机器人的工作特点。
(1)定线(即沿着黑线巡逻)
(2)不定向(可以直行、左转、右转)
4.学会设计中小学教育机器人的一般方法。
(1)分析项目
(2)确定方案
(3)技术选型
(4)绵程环境的搭建
5掌握超声波传感器、红外循迹传感器的工作原理。
超声波传感器一般有两个探头,一个是超声波发射端,一个是超声波接收端。其工作原理是利用超声波碰
到障碍物会产生显著的反射,形成反射回波,通过公式s=(340xt)/2计算出小车与障碍物反射面之间的距离,
从而控制小车停车或避开障碍物。
红外循迹传感器有一个发射管和一个接收管组成,发射管发射出的红外光遇到黑色物体时,会被吸收,这
时,接收管就接收不到反射回来的红外光,红外循迹传感器就输出高电平:发射管发射出的红外光遇到白
色物体时,不会被吸收,这时,接收管就能接收到反射回来的红外光,红外循迹传感器就输出低电平,小
车以此对路面黑色轨迹进行检测,从而控制小车运动路线。
6.能设计、搭建机器人小车,掌握机器人系统的接线方法。
(1)确立搭建要求
(2)搭建机器人小车
(3)系统接线
7能根据机器人小车的功能需求,设计流程图。
(1)机器人小车工作流程图
(2)循迹流程图
(3)不同类型路口检测编程流程图
8能根据流程图编写程序,实现机器人小车的各项功能。
(1)设计并声明相关变量
(2)直流电机运行模块函数
(3)遇障碍提示程序
(4)逻辑判断
(5)组合各功能程序模块
同课章节目录