新川教版(2019)信息技术九年级下册 第2单元 探索未来城市中的机器人 知识点+练习(学生版+解析版)
文档属性
| 名称 | 新川教版(2019)信息技术九年级下册 第2单元 探索未来城市中的机器人 知识点+练习(学生版+解析版) |
|
|
| 格式 | |||
| 文件大小 | 1.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 川教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2022-07-14 00:00:00 | ||
图片预览
文档简介
九年级下册
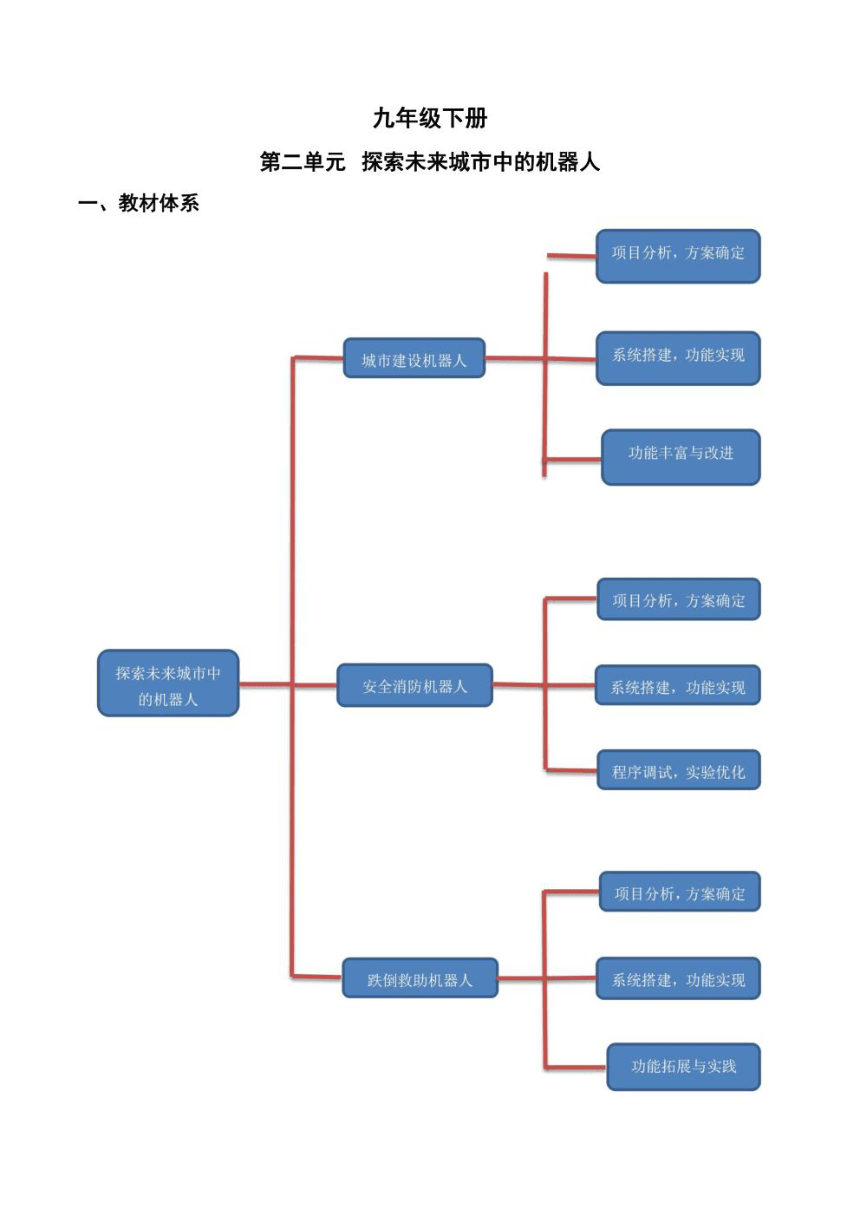
第二单元探索未来城市中的机器人
一、教材体系
项目分析,方案确定
城市建设机器人
系统搭建,功能实现
功能丰富与改进
项目分析,方案确定
探索未来城市中
安全消防机器人
系统搭建,功能实现
的机器人
程序调试,实验优化
项目分析,方案确定
跌倒救助机器人
系统搭建,功能实现
功能拓展与实践
二、知识点
1.了解机械臂的控制原理,能够构建一个简单的机械臂模型。
将机械臂一侧的物体夹持住以后,把它移动到机械臂的另一侧,完成搬运功能。机械臂根据结构形式的不
同分为:多关节机械臂、直角坐标系机械臂、极坐标机械臂、柱坐标机械臂等。
2理解舵机的工作原理,能使用多个舵机协调地完成一组动作。
舵机作为机械臂的驱动机构,是一种位置(角度)伺服的驱动器,用于需要角度不断变化并保持相应位置
(角度)的控制系统。三自由度机械臂主要由机械爪、前摆臂、后摆臂和底部转盘构成,由四个舵机控制。
夹持舵机控制机械爪的开合:左侧舵机控制前摆臂的摆动,主要影响机械爪的前后移动:右侧舵机控制后
摆臂的摆动,主要影响机械爪的上下移动:底盘舵机控制底部转盘的转动,影响机械爪水平方向的转动。
3,掌握信号输入器件控制机械臂的方法。(电位器的输入值可以作为舵机转动角度的依据,机械臂其余部件
的控制方法与之类似。因为电位器输入的数值范围为0~1023,而舵机转动的角度范围为0°~180°,所以,
用电位器控制舵机转动时,需要使用mp()映射函数,将读取的电位器的值映射为舵机转动的角度范围。除
电位器之外,还可以使用双轴按键摇杆、手柄、红外遥控器等器件来控制机械臂。)
4.理解火焰传感器的工作原理并掌握其使用方法。(火焰传感器是利用火焰发出特定波长的红外线(波长
760~1100m)来检测光源的传感器。它把火焰的亮度转化为高低变化的电平信号输入到控制器里,控制器
根据信号的变化做出相应的程序处理。)
5.学会一种避障算法,实现避障功能。(机器人小车直行过程中如果没有检测到障碍物,就保持直行:如果
检测到障碍物,就后退,然后左转。编写程序控制机器人小车避开障碍物。)
6.能设计、搭建一个消防机器人模型,并编写程序实现功能。(先搭建消防机器人的结构,将控制器与运动
装置、检测装置、灭火装置正确连接:分步骤检测各装置正常运行后编写程序,实现灭火功能;并在实际
环境中不断运行实验和优化参数。)
7.掌握运动传感器、蜂鸣器等器件的使用方法。(运动传感器是一种常用的检测器件,在多个行业中都有应
用。常用的运动传感器主要包括三轴加速度传感器、陀螺仪、地磁传感器等。MPU6050模块集成了三轴MEMS
陀螺仪和三轴MEMS加速度计,能够方便地测量三轴加速度和三轴偏转角。蜂鸣器是一种结构化的电子讯
响器,广泛用于计算机、打印机、复印机、告警器、电子玩具、汽车电子设备、电话、定时器等电子产品
中作发声器件。)
8.能设计、搭建一个跌倒救助机器人模型,并编写程序实现功能。(跌倒救助机器人分为两个部分:一个部
分是含有跌倒检测和求救功能的穿戴端,使用MPU6056模块检测跌倒事件的发生,使用蜂鸣器发出求救声,
通过蓝牙传输远程求救信号:另一部分为远程救援端的救援机器人,在接到求救信号后启动救护告警,并
启动救护动作实施救援。)
练习题
一、单选题
1、舵机的转角范围为(
A、0°~45°
B、0°90
C、0°~180
D、0°360°
2、左侧舵机控制(
)。
A、机械爪的开合
B、前摆臂的摆动
C、后摆臂的摆动
D、底部转盘的转动
二、多选题
1、机械臂的种类包括(
)o
A、多关节机械臂
B、直角坐标系机械臂
第二单元探索未来城市中的机器人
一、教材体系
项目分析,方案确定
城市建设机器人
系统搭建,功能实现
功能丰富与改进
项目分析,方案确定
探索未来城市中
安全消防机器人
系统搭建,功能实现
的机器人
程序调试,实验优化
项目分析,方案确定
跌倒救助机器人
系统搭建,功能实现
功能拓展与实践
二、知识点
1.了解机械臂的控制原理,能够构建一个简单的机械臂模型。
将机械臂一侧的物体夹持住以后,把它移动到机械臂的另一侧,完成搬运功能。机械臂根据结构形式的不
同分为:多关节机械臂、直角坐标系机械臂、极坐标机械臂、柱坐标机械臂等。
2理解舵机的工作原理,能使用多个舵机协调地完成一组动作。
舵机作为机械臂的驱动机构,是一种位置(角度)伺服的驱动器,用于需要角度不断变化并保持相应位置
(角度)的控制系统。三自由度机械臂主要由机械爪、前摆臂、后摆臂和底部转盘构成,由四个舵机控制。
夹持舵机控制机械爪的开合:左侧舵机控制前摆臂的摆动,主要影响机械爪的前后移动:右侧舵机控制后
摆臂的摆动,主要影响机械爪的上下移动:底盘舵机控制底部转盘的转动,影响机械爪水平方向的转动。
3,掌握信号输入器件控制机械臂的方法。(电位器的输入值可以作为舵机转动角度的依据,机械臂其余部件
的控制方法与之类似。因为电位器输入的数值范围为0~1023,而舵机转动的角度范围为0°~180°,所以,
用电位器控制舵机转动时,需要使用mp()映射函数,将读取的电位器的值映射为舵机转动的角度范围。除
电位器之外,还可以使用双轴按键摇杆、手柄、红外遥控器等器件来控制机械臂。)
4.理解火焰传感器的工作原理并掌握其使用方法。(火焰传感器是利用火焰发出特定波长的红外线(波长
760~1100m)来检测光源的传感器。它把火焰的亮度转化为高低变化的电平信号输入到控制器里,控制器
根据信号的变化做出相应的程序处理。)
5.学会一种避障算法,实现避障功能。(机器人小车直行过程中如果没有检测到障碍物,就保持直行:如果
检测到障碍物,就后退,然后左转。编写程序控制机器人小车避开障碍物。)
6.能设计、搭建一个消防机器人模型,并编写程序实现功能。(先搭建消防机器人的结构,将控制器与运动
装置、检测装置、灭火装置正确连接:分步骤检测各装置正常运行后编写程序,实现灭火功能;并在实际
环境中不断运行实验和优化参数。)
7.掌握运动传感器、蜂鸣器等器件的使用方法。(运动传感器是一种常用的检测器件,在多个行业中都有应
用。常用的运动传感器主要包括三轴加速度传感器、陀螺仪、地磁传感器等。MPU6050模块集成了三轴MEMS
陀螺仪和三轴MEMS加速度计,能够方便地测量三轴加速度和三轴偏转角。蜂鸣器是一种结构化的电子讯
响器,广泛用于计算机、打印机、复印机、告警器、电子玩具、汽车电子设备、电话、定时器等电子产品
中作发声器件。)
8.能设计、搭建一个跌倒救助机器人模型,并编写程序实现功能。(跌倒救助机器人分为两个部分:一个部
分是含有跌倒检测和求救功能的穿戴端,使用MPU6056模块检测跌倒事件的发生,使用蜂鸣器发出求救声,
通过蓝牙传输远程求救信号:另一部分为远程救援端的救援机器人,在接到求救信号后启动救护告警,并
启动救护动作实施救援。)
练习题
一、单选题
1、舵机的转角范围为(
A、0°~45°
B、0°90
C、0°~180
D、0°360°
2、左侧舵机控制(
)。
A、机械爪的开合
B、前摆臂的摆动
C、后摆臂的摆动
D、底部转盘的转动
二、多选题
1、机械臂的种类包括(
)o
A、多关节机械臂
B、直角坐标系机械臂
同课章节目录