教科版物理八年级下册课课练:11.1 杠 杆 第1课时 杠杆的基本概念及杠杆的平衡条件(有答案)
文档属性
| 名称 | 教科版物理八年级下册课课练:11.1 杠 杆 第1课时 杠杆的基本概念及杠杆的平衡条件(有答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 303.7KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 教科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-07-27 00:00:00 | ||
图片预览
文档简介
[第十一章 1.杠 杆 第1课时 杠杆的基本概念及杠杆的平衡条件]
一、选择题
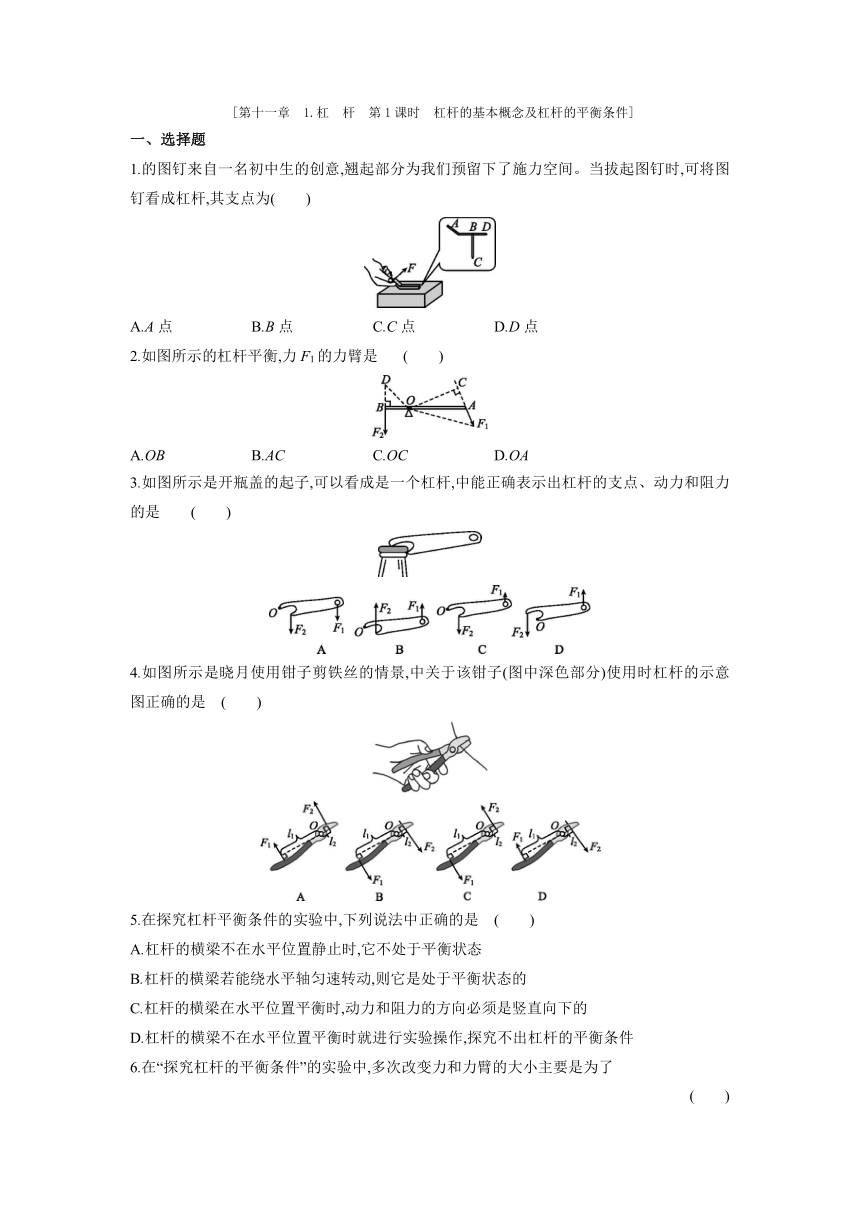
1.的图钉来自一名初中生的创意,翘起部分为我们预留下了施力空间。当拔起图钉时,可将图钉看成杠杆,其支点为( )
A.A点 B.B点 C.C点 D.D点
2.如图所示的杠杆平衡,力F1的力臂是 ( )
A.OB B.AC C.OC D.OA
3.如图所示是开瓶盖的起子,可以看成是一个杠杆,中能正确表示出杠杆的支点、动力和阻力的是 ( )
4.如图所示是晓月使用钳子剪铁丝的情景,中关于该钳子(图中深色部分)使用时杠杆的示意图正确的是 ( )
5.在探究杠杆平衡条件的实验中,下列说法中正确的是 ( )
A.杠杆的横梁不在水平位置静止时,它不处于平衡状态
B.杠杆的横梁若能绕水平轴匀速转动,则它是处于平衡状态的
C.杠杆的横梁在水平位置平衡时,动力和阻力的方向必须是竖直向下的
D.杠杆的横梁不在水平位置平衡时就进行实验操作,探究不出杠杆的平衡条件
6.在“探究杠杆的平衡条件”的实验中,多次改变力和力臂的大小主要是为了
( )
A.使每组数据更准确
B.多次测量取平均值,减小误差
C.减小由于摩擦带来的误差
D.从多组数据中分析归纳出物理规律
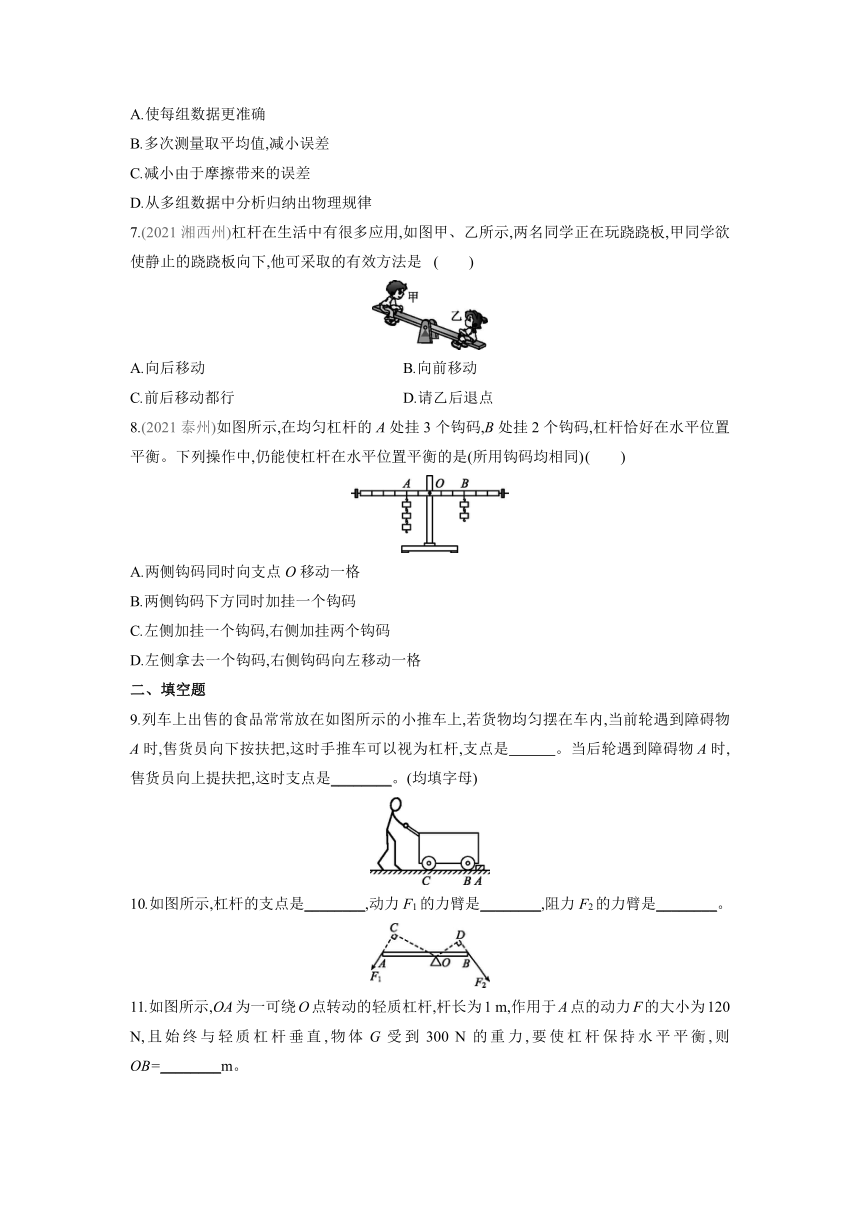
7.(2021湘西州)杠杆在生活中有很多应用,如图甲、乙所示,两名同学正在玩跷跷板,甲同学欲使静止的跷跷板向下,他可采取的有效方法是 ( )
A.向后移动 B.向前移动
C.前后移动都行 D.请乙后退点
8.(2021泰州)如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡。下列操作中,仍能使杠杆在水平位置平衡的是(所用钩码均相同) ( )
A.两侧钩码同时向支点O移动一格
B.两侧钩码下方同时加挂一个钩码
C.左侧加挂一个钩码,右侧加挂两个钩码
D.左侧拿去一个钩码,右侧钩码向左移动一格
二、填空题
9.列车上出售的食品常常放在如图所示的小推车上,若货物均匀摆在车内,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 。当后轮遇到障碍物A时,售货员向上提扶把,这时支点是________。(均填字母)
10.如图所示,杠杆的支点是________,动力F1的力臂是________,阻力F2的力臂是________。
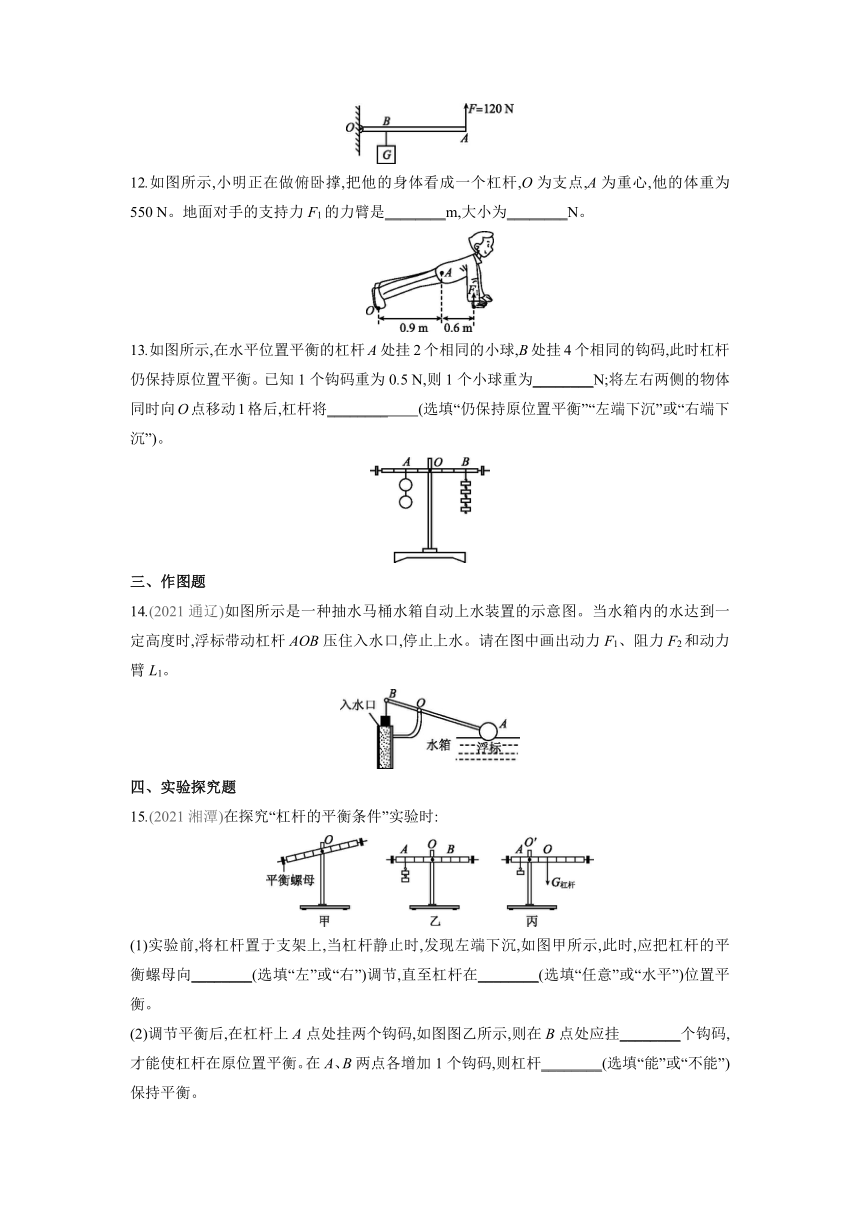
11.如图所示,OA为一可绕O点转动的轻质杠杆,杆长为1 m,作用于A点的动力F的大小为120 N,且始终与轻质杠杆垂直,物体G受到300 N的重力,要使杠杆保持水平平衡,则OB=________m。
12.如图所示,小明正在做俯卧撑,把他的身体看成一个杠杆,O为支点,A为重心,他的体重为550 N。地面对手的支持力F1的力臂是________m,大小为________N。
13.如图所示,在水平位置平衡的杠杆A处挂2个相同的小球,B处挂4个相同的钩码,此时杠杆仍保持原位置平衡。已知1个钩码重为0.5 N,则1个小球重为________N;将左右两侧的物体同时向O点移动1格后,杠杆将________ (选填“仍保持原位置平衡”“左端下沉”或“右端下沉”)。
三、作图题
14.(2021通辽)如图所示是一种抽水马桶水箱自动上水装置的示意图。当水箱内的水达到一定高度时,浮标带动杠杆AOB压住入水口,停止上水。请在图中画出动力F1、阻力F2和动力臂L1。
四、实验探究题
15.(2021湘潭)在探究“杠杆的平衡条件”实验时:
(1)实验前,将杠杆置于支架上,当杠杆静止时,发现左端下沉,如图甲所示,此时,应把杠杆的平衡螺母向________(选填“左”或“右”)调节,直至杠杆在________(选填“任意”或“水平”)位置平衡。
(2)调节平衡后,在杠杆上A点处挂两个钩码,如图图乙所示,则在B点处应挂________个钩码,才能使杠杆在原位置平衡。在A、B两点各增加1个钩码,则杠杆________(选填“能”或“不能”)保持平衡。
(3)为了使实验结论具有________(选填“普遍性”或“偶然性”),应改变钩码个数及悬挂位置,进行多次实验。
(4)实验时,使杠杆的重心位置保持在O点不变,将支点换到O'点,如图图丙所示,发现A点只挂1个钩码,杠杆仍然保持平衡。若每个钩码重为0.5 N,则杠杆重力为________N。由此可知,将杠杆支点位置设在________(选填“O”或“O'”)点进行实验,能避免杠杆自身重力对实验的影响。
答案
第1课时 杠杆的基本概念及杠杆的平衡条件
1.D 这个装置的目的是能把图钉拔出来,该图钉的工作过程是:用力向上撬杠杆的A点,设备绕着D点顺时针转动,使图钉拔出,由此可知D点是支点。
2.C 已知支点为O,从支点到力的作用线的垂线段为力臂,由图可知,OC⊥F1,所以F1的力臂是OC。
3.C 4.A
5.B 杠杆平衡是指杠杆处于静止或匀速转动状态,与杠杆所处的位置无关,故A不正确、B正确;杠杆在水平位置平衡,如图果动力与阻力的方向均竖直向下,则动力臂与阻力臂均在杠杆上,便于实验的测量,但力臂并非一定要在杠杆上,即动力与阻力不一定必须是竖直向下的,故C不正确;探究杠杆平衡条件时,使杠杆在水平位置平衡,可以消除杠杆自重对实验的影响且便于测量力臂,如图果不在水平位置平衡,测量时会很不方便,但可以探究出杠杆的平衡条件,故D不正确。
6.D
7.A 甲同学欲使静止的跷跷板向下,根据杠杆的平衡条件可知,可以增大甲的压力或增大甲的压力的力臂,故他可以向后移动;若乙后退点,则乙的力臂变大,乙的压力与其力臂的乘积变大,跷跷板的右端不会向下,故A正确。
8.D
9.C B 当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可看成杠杆,支点是C点;当后轮遇到障碍物A时,售货员向上提扶把,这时支点是B点。
10.O OC OD
杠杆的支点是O;动力F1的力臂是支点到动力作用线的距离,即OC;阻力F2的力臂是支点到阻力作用线的距离,即OD。
11.0.4
要使杠杆保持水平平衡,则由杠杆平衡条件可得:F×OA=G×OB,即:120 N×1 m=300 N×OB,解得:OB=0.4 m。
12.1.5 330
(1)根据图示可知,支点到重力作用线的垂线段和支点到支持力作用线的垂线段分别为阻力臂和动力臂,即动力臂:L1=0.9 m+0.6 m=1.5 m,阻力臂L2=0.9 m;
(2)根据杠杆平衡的条件可得:FL1=GL2,F×1.5 m=550 N×0.9 m,F=330 N。
13.1.5 右端下沉
(1)设杠杆一个小格的长为L,由图可知B处受力:F2=4G钩码=4×0.5 N=2 N,力臂L2=3L,
A处受拉力:F1=2G球,力臂L1=2L,
由杠杆平衡条件可得:F1L1=F2L2,
即2G球×2L=2 N×3L,
所以,G球=1.5 N。
(2)将左右两侧的物体同时向O点移动1格后,则力臂L1'=L,L2'=2L,所以,
杠杆左边力与力臂的乘积:
F1L1'=2G球L1'=2×1.5 N×L=3 N×L,
杠杆右边力与力臂的乘积:
F2L2'=4G钩码L2'=4×0.5 N×2L=4 N×L,
因F1L1'14.如图图所示
15.(1)右 水平 (2)3 不能
(3)普遍性 (4)0.25 O
(1)当杠杆静止时,发现左端下沉,此时,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡。
(2)设一个钩码重为G,杠杆一格长为L,根据杠杆平衡条件可知:2G×3L=nG×2L,所以n=3,需在B点挂3个钩码。
在A、B两点各增加1个钩码,左侧变为3G×3L=9GL,右侧变为4G×2L=8GL,故杠杆左端下沉,不能保持平衡。
(3)多次改变力和力臂的大小,得到了多组实验数据,得出了杠杆的平衡条件。该实验测多组数据的目的是使得出的结论更具有普遍性。
(4)根据杠杆平衡条件可知:0.5 N×L=G杠杆×2L,解得G杠杆=0.25 N。
将杠杆的中心位置挂在支架上,可消除杠杆自重的影响,则应将杠杆支点位置设在O点进行实验。
一、选择题
1.的图钉来自一名初中生的创意,翘起部分为我们预留下了施力空间。当拔起图钉时,可将图钉看成杠杆,其支点为( )
A.A点 B.B点 C.C点 D.D点
2.如图所示的杠杆平衡,力F1的力臂是 ( )
A.OB B.AC C.OC D.OA
3.如图所示是开瓶盖的起子,可以看成是一个杠杆,中能正确表示出杠杆的支点、动力和阻力的是 ( )
4.如图所示是晓月使用钳子剪铁丝的情景,中关于该钳子(图中深色部分)使用时杠杆的示意图正确的是 ( )
5.在探究杠杆平衡条件的实验中,下列说法中正确的是 ( )
A.杠杆的横梁不在水平位置静止时,它不处于平衡状态
B.杠杆的横梁若能绕水平轴匀速转动,则它是处于平衡状态的
C.杠杆的横梁在水平位置平衡时,动力和阻力的方向必须是竖直向下的
D.杠杆的横梁不在水平位置平衡时就进行实验操作,探究不出杠杆的平衡条件
6.在“探究杠杆的平衡条件”的实验中,多次改变力和力臂的大小主要是为了
( )
A.使每组数据更准确
B.多次测量取平均值,减小误差
C.减小由于摩擦带来的误差
D.从多组数据中分析归纳出物理规律
7.(2021湘西州)杠杆在生活中有很多应用,如图甲、乙所示,两名同学正在玩跷跷板,甲同学欲使静止的跷跷板向下,他可采取的有效方法是 ( )
A.向后移动 B.向前移动
C.前后移动都行 D.请乙后退点
8.(2021泰州)如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡。下列操作中,仍能使杠杆在水平位置平衡的是(所用钩码均相同) ( )
A.两侧钩码同时向支点O移动一格
B.两侧钩码下方同时加挂一个钩码
C.左侧加挂一个钩码,右侧加挂两个钩码
D.左侧拿去一个钩码,右侧钩码向左移动一格
二、填空题
9.列车上出售的食品常常放在如图所示的小推车上,若货物均匀摆在车内,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 。当后轮遇到障碍物A时,售货员向上提扶把,这时支点是________。(均填字母)
10.如图所示,杠杆的支点是________,动力F1的力臂是________,阻力F2的力臂是________。
11.如图所示,OA为一可绕O点转动的轻质杠杆,杆长为1 m,作用于A点的动力F的大小为120 N,且始终与轻质杠杆垂直,物体G受到300 N的重力,要使杠杆保持水平平衡,则OB=________m。
12.如图所示,小明正在做俯卧撑,把他的身体看成一个杠杆,O为支点,A为重心,他的体重为550 N。地面对手的支持力F1的力臂是________m,大小为________N。
13.如图所示,在水平位置平衡的杠杆A处挂2个相同的小球,B处挂4个相同的钩码,此时杠杆仍保持原位置平衡。已知1个钩码重为0.5 N,则1个小球重为________N;将左右两侧的物体同时向O点移动1格后,杠杆将________ (选填“仍保持原位置平衡”“左端下沉”或“右端下沉”)。
三、作图题
14.(2021通辽)如图所示是一种抽水马桶水箱自动上水装置的示意图。当水箱内的水达到一定高度时,浮标带动杠杆AOB压住入水口,停止上水。请在图中画出动力F1、阻力F2和动力臂L1。
四、实验探究题
15.(2021湘潭)在探究“杠杆的平衡条件”实验时:
(1)实验前,将杠杆置于支架上,当杠杆静止时,发现左端下沉,如图甲所示,此时,应把杠杆的平衡螺母向________(选填“左”或“右”)调节,直至杠杆在________(选填“任意”或“水平”)位置平衡。
(2)调节平衡后,在杠杆上A点处挂两个钩码,如图图乙所示,则在B点处应挂________个钩码,才能使杠杆在原位置平衡。在A、B两点各增加1个钩码,则杠杆________(选填“能”或“不能”)保持平衡。
(3)为了使实验结论具有________(选填“普遍性”或“偶然性”),应改变钩码个数及悬挂位置,进行多次实验。
(4)实验时,使杠杆的重心位置保持在O点不变,将支点换到O'点,如图图丙所示,发现A点只挂1个钩码,杠杆仍然保持平衡。若每个钩码重为0.5 N,则杠杆重力为________N。由此可知,将杠杆支点位置设在________(选填“O”或“O'”)点进行实验,能避免杠杆自身重力对实验的影响。
答案
第1课时 杠杆的基本概念及杠杆的平衡条件
1.D 这个装置的目的是能把图钉拔出来,该图钉的工作过程是:用力向上撬杠杆的A点,设备绕着D点顺时针转动,使图钉拔出,由此可知D点是支点。
2.C 已知支点为O,从支点到力的作用线的垂线段为力臂,由图可知,OC⊥F1,所以F1的力臂是OC。
3.C 4.A
5.B 杠杆平衡是指杠杆处于静止或匀速转动状态,与杠杆所处的位置无关,故A不正确、B正确;杠杆在水平位置平衡,如图果动力与阻力的方向均竖直向下,则动力臂与阻力臂均在杠杆上,便于实验的测量,但力臂并非一定要在杠杆上,即动力与阻力不一定必须是竖直向下的,故C不正确;探究杠杆平衡条件时,使杠杆在水平位置平衡,可以消除杠杆自重对实验的影响且便于测量力臂,如图果不在水平位置平衡,测量时会很不方便,但可以探究出杠杆的平衡条件,故D不正确。
6.D
7.A 甲同学欲使静止的跷跷板向下,根据杠杆的平衡条件可知,可以增大甲的压力或增大甲的压力的力臂,故他可以向后移动;若乙后退点,则乙的力臂变大,乙的压力与其力臂的乘积变大,跷跷板的右端不会向下,故A正确。
8.D
9.C B 当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可看成杠杆,支点是C点;当后轮遇到障碍物A时,售货员向上提扶把,这时支点是B点。
10.O OC OD
杠杆的支点是O;动力F1的力臂是支点到动力作用线的距离,即OC;阻力F2的力臂是支点到阻力作用线的距离,即OD。
11.0.4
要使杠杆保持水平平衡,则由杠杆平衡条件可得:F×OA=G×OB,即:120 N×1 m=300 N×OB,解得:OB=0.4 m。
12.1.5 330
(1)根据图示可知,支点到重力作用线的垂线段和支点到支持力作用线的垂线段分别为阻力臂和动力臂,即动力臂:L1=0.9 m+0.6 m=1.5 m,阻力臂L2=0.9 m;
(2)根据杠杆平衡的条件可得:FL1=GL2,F×1.5 m=550 N×0.9 m,F=330 N。
13.1.5 右端下沉
(1)设杠杆一个小格的长为L,由图可知B处受力:F2=4G钩码=4×0.5 N=2 N,力臂L2=3L,
A处受拉力:F1=2G球,力臂L1=2L,
由杠杆平衡条件可得:F1L1=F2L2,
即2G球×2L=2 N×3L,
所以,G球=1.5 N。
(2)将左右两侧的物体同时向O点移动1格后,则力臂L1'=L,L2'=2L,所以,
杠杆左边力与力臂的乘积:
F1L1'=2G球L1'=2×1.5 N×L=3 N×L,
杠杆右边力与力臂的乘积:
F2L2'=4G钩码L2'=4×0.5 N×2L=4 N×L,
因F1L1'
15.(1)右 水平 (2)3 不能
(3)普遍性 (4)0.25 O
(1)当杠杆静止时,发现左端下沉,此时,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡。
(2)设一个钩码重为G,杠杆一格长为L,根据杠杆平衡条件可知:2G×3L=nG×2L,所以n=3,需在B点挂3个钩码。
在A、B两点各增加1个钩码,左侧变为3G×3L=9GL,右侧变为4G×2L=8GL,故杠杆左端下沉,不能保持平衡。
(3)多次改变力和力臂的大小,得到了多组实验数据,得出了杠杆的平衡条件。该实验测多组数据的目的是使得出的结论更具有普遍性。
(4)根据杠杆平衡条件可知:0.5 N×L=G杠杆×2L,解得G杠杆=0.25 N。
将杠杆的中心位置挂在支架上,可消除杠杆自重的影响,则应将杠杆支点位置设在O点进行实验。