粤沪版物理八年级下册同步提优训练:6.5 探究杠杆的平衡条件 第1课时 杠杆及其平衡条件(含答案)
文档属性
| 名称 | 粤沪版物理八年级下册同步提优训练:6.5 探究杠杆的平衡条件 第1课时 杠杆及其平衡条件(含答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 339.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪粤版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-08-06 00:00:00 | ||
图片预览

文档简介
6.5 探究杠杆的平衡条件
第1课时 杠杆及其平衡条件
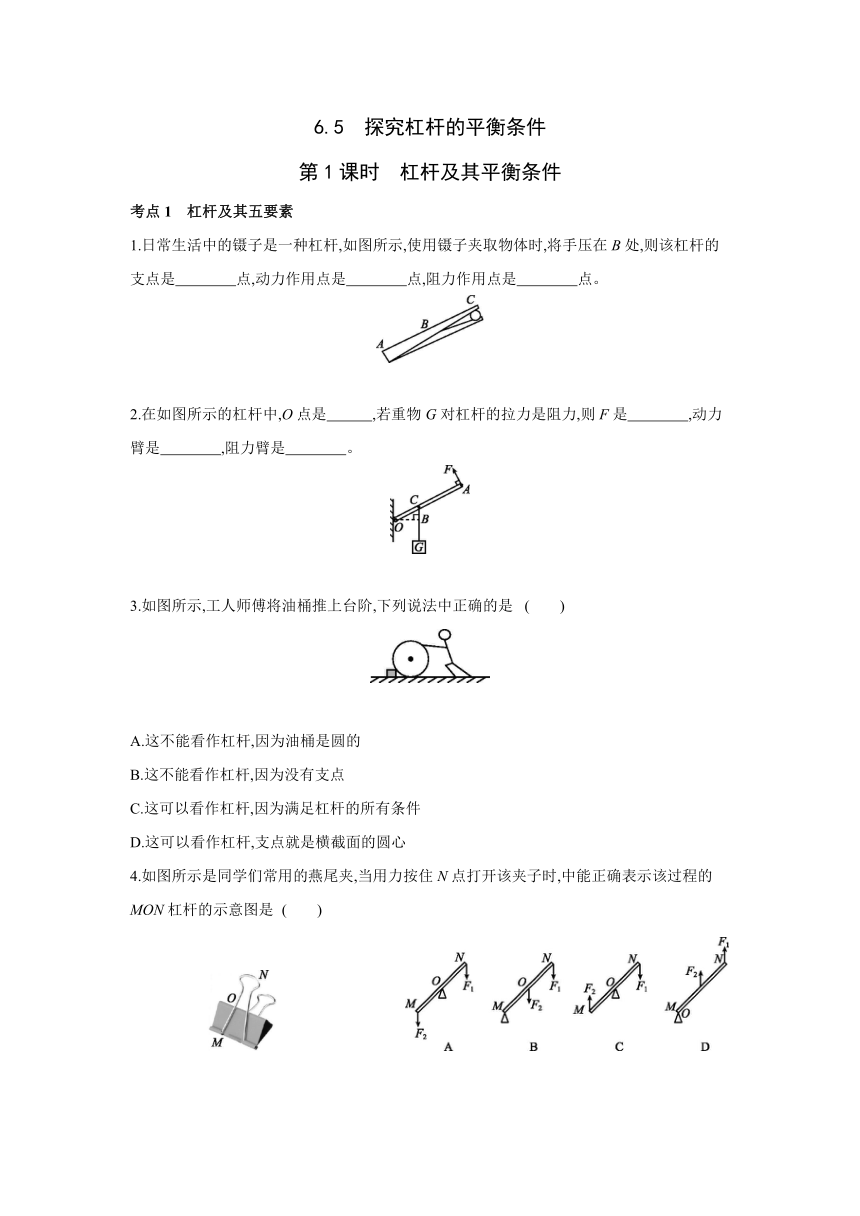
考点1 杠杆及其五要素
1.日常生活中的镊子是一种杠杆,如图所示,使用镊子夹取物体时,将手压在B处,则该杠杆的支点是 点,动力作用点是 点,阻力作用点是 点。
2.在如图所示的杠杆中,O点是 ,若重物G对杠杆的拉力是阻力,则F是 ,动力臂是 ,阻力臂是 。
3.如图所示,工人师傅将油桶推上台阶,下列说法中正确的是 ( )
A.这不能看作杠杆,因为油桶是圆的
B.这不能看作杠杆,因为没有支点
C.这可以看作杠杆,因为满足杠杆的所有条件
D.这可以看作杠杆,支点就是横截面的圆心
4.如图所示是同学们常用的燕尾夹,当用力按住N点打开该夹子时,中能正确表示该过程的MON杠杆的示意图是 ( )
(1)杠杆能绕某一固定点转动,且是硬棒;(2)动力和阻力使杠杆绕支点转动的方向相反;(3)杠杆不一定是直的,可以是各种形状。
考点2 力臂及其画法
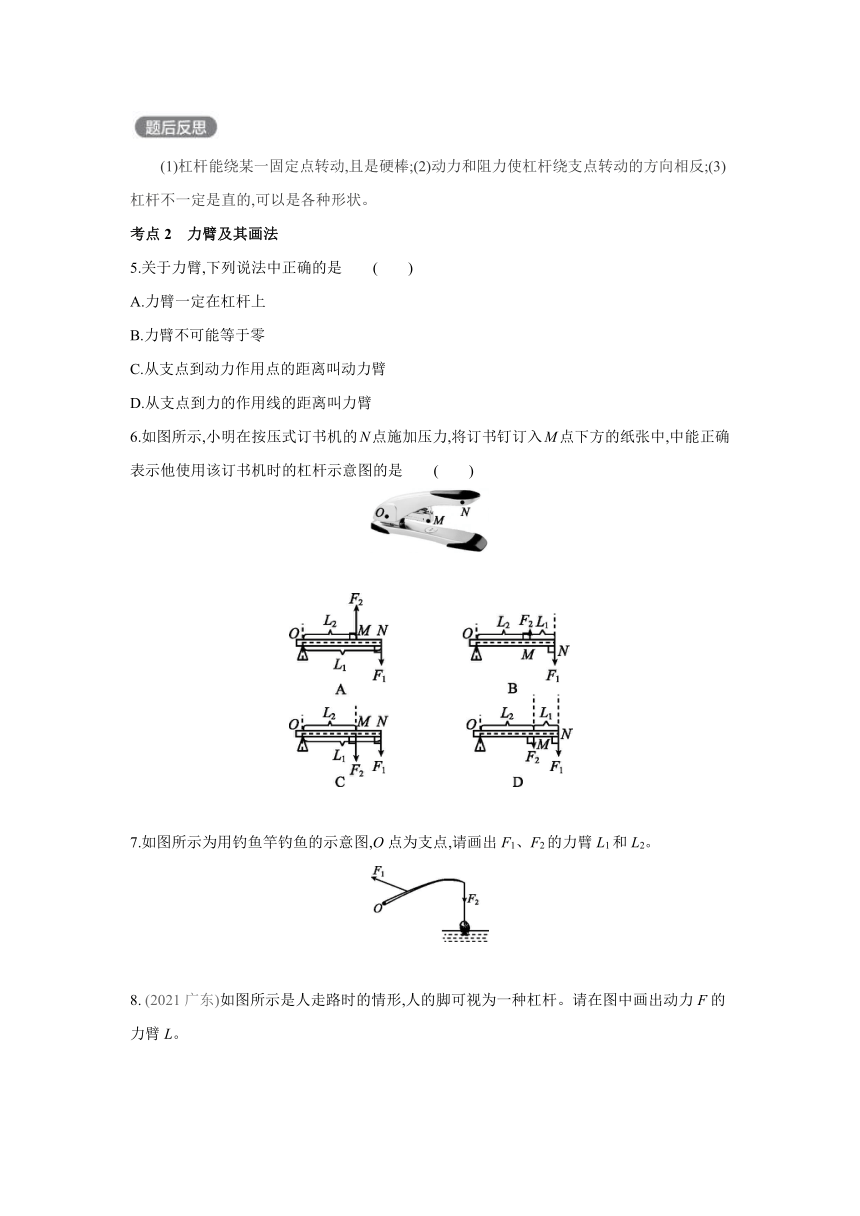
5.关于力臂,下列说法中正确的是 ( )
A.力臂一定在杠杆上
B.力臂不可能等于零
C.从支点到动力作用点的距离叫动力臂
D.从支点到力的作用线的距离叫力臂
6.如图所示,小明在按压式订书机的N点施加压力,将订书钉订入M点下方的纸张中,中能正确表示他使用该订书机时的杠杆示意图的是 ( )
7.如图所示为用钓鱼竿钓鱼的示意图,O点为支点,请画出F1、F2的力臂L1和L2。
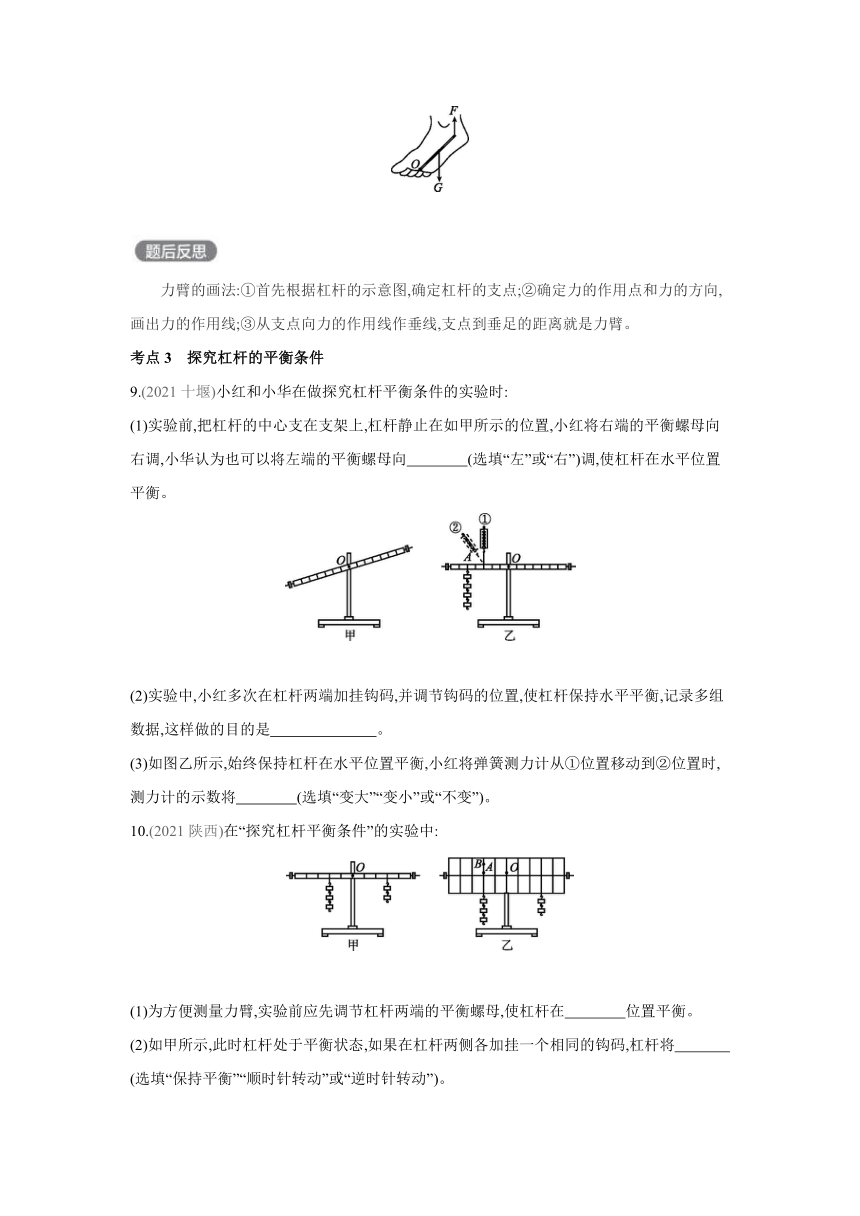
8. (2021广东)如图所示是人走路时的情形,人的脚可视为一种杠杆。请在图中画出动力F的力臂L。
力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点;②确定力的作用点和力的方向,画出力的作用线;③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
考点3 探究杠杆的平衡条件
9.(2021十堰)小红和小华在做探究杠杆平衡条件的实验时:
(1)实验前,把杠杆的中心支在支架上,杠杆静止在如甲所示的位置,小红将右端的平衡螺母向右调,小华认为也可以将左端的平衡螺母向 (选填“左”或“右”)调,使杠杆在水平位置平衡。
(2)实验中,小红多次在杠杆两端加挂钩码,并调节钩码的位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 。
(3)如图乙所示,始终保持杠杆在水平位置平衡,小红将弹簧测力计从①位置移动到②位置时,测力计的示数将 (选填“变大”“变小”或“不变”)。
10.(2021陕西)在“探究杠杆平衡条件”的实验中:
(1)为方便测量力臂,实验前应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡。
(2)如甲所示,此时杠杆处于平衡状态,如果在杠杆两侧各加挂一个相同的钩码,杠杆将 (选填“保持平衡”“顺时针转动”或“逆时针转动”)。
(3)如图乙所示是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到A点正上方的B点,力臂是线段 (选填“OA”“OB”或“AB”),此时杠杆 (选填“仍能”或“不能”)保持平衡。
11.小明同学做探究杠杆平衡条件的实验。
(1)小明通过实验,得出了如下表所示的数据,根据数据得出杠杆的平衡条件:动力+动力臂=阻力+阻力臂,你认为他的实验过程存在什么问题
请写出两点: ;
。
动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
4 5 5 4
(2)实验中,小明用如图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒他不要采用这种方式,主要是因为 。(填字母)
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)小明马上进行了改正,他不改变支点右侧所挂的两个钩码及其位置,保持左侧第 格的钩码不动,将支点左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
探究杠杆平衡条件的注意事项:
(1)实验前调节杠杆在水平位置平衡,目的是消除杠杆自重对实验的影响。
(2)实验过程中通过增减钩码或移动钩码位置,使杠杆在水平位置平衡,目的是便于直接读出力臂的大小。
考点4 杠杆平衡条件的计算
12.(2021齐齐哈尔)杠杆是我们生活中一种常见的简单机械,如图所示,轻质杠杆OA可绕O点转动(不计摩擦),在A点悬挂一个重为20 N的物体,在B点施加一个竖直向上的拉力F,使杠杆在水平位置平衡,且OB∶AB=2∶1,则拉力F= N。
13.如图所示,轻杆AB悬于O点,BO=3AO,其左端挂一质量为6 kg的物体,右端施加
一个与水平方向成30°夹角的力F,此时轻杆水平平衡。请画出力F的力臂,并算出其大小为
N。(g取10 N/kg)
14.如图所示,在做俯卧撑时,人体可看成一个杠杆,A点为重心,O点为支点,支撑点是B点,当手臂与地面垂直时,动力臂是 m;若人的质量是60 kg,则地面对双手的支持力为
N。(g取10 N/kg)
15.如甲所示为前臂平伸用手掌托住铅球时的情形。我们可将图甲简化成如图乙所示的杠杆,不计杠杆自重。若铅球质量m=3 kg,OA=0.03 m,OB=0.30 m,求此时肱二头肌对前臂产生的拉力F1的大小。(g取10 N/kg)
(1)确定杠杆支点的位置;(2)分清杠杆受到的动力和阻力,明确其大小和方向,并作出力的示意图;(3)确定每个力的力臂;(4)根据杠杆平衡条件列出关系式并分析求解。
16.小明想测量一把质地均匀的木尺的质量,器材有待测木尺、支座、带细线的质量为m的钩码。请你将下列实验步骤补充完整。
(1)如甲所示,将木尺平放在支座上,左右移动木尺,使木尺在水平位置平衡,记下使木尺平衡的这个支点O,这个支点就是木尺的 。
(2)如图乙所示, ,记录钩码悬挂点到支座的距离L1和支点O到支座的距离L2。
(3)根据 ,可以计算出木尺的质量m木尺= 。
答案
6.5 探究杠杆的平衡条件
第1课时 杠杆及其平衡条件
1.A B C
2.支点 动力 OA OB 3.C
4.A 由图可知,当用力按住N点打开该夹子时,其会绕着中间的固定点O转动,即O为支点,所按压的N点为动力F1的作用点,F1的方向向下;而杠杆MON受到向下的阻力F2,M点就是阻力F2的作用点,故A正确。
5.D
6.A
7.如图所示
8.如图所示
9.(1)右 (2)寻找普遍规律 (3)变大
10.(1)水平 (2)顺时针转动 (3)OA 仍能
11.(1)实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论 单位不同的两个物理量不能相加
(2)D
(3)2
(1)小明同学的结论:动力+动力臂=阻力+阻力臂,将单位不同的两个物理量相加,没有意义,且实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论。
(2)实验中,用如图所示的方式悬挂钩码,杠杆平衡是杠杆左侧多个力共同作用的结果,采用这种方式是不妥当的,这主要是因为杠杆上力和力臂数目过多。
(3)不改变支点右侧所挂的两个钩码及其位置,将左侧另外两个钩码改挂到第三个钩码的下方,即左侧的力等于三个钩码的重力,根据杠杆的平衡条件可知,应保持左侧第2格的钩码不动。
12.30 杠杆水平平衡时,A点受到的阻力为FA=G物=20 N,动力F的力臂为OB,阻力FA的力臂为OA,因为OB=2AB,所以OA=OB+AB=3AB,即OB∶OA=2∶3,由杠杆的平衡条件可得,拉力F===30 N。
13.如图所示 40
反向延长力F的作用线,过支点O作力F作用线的垂线段即为F的力臂L1,因为右端施加的力F与水平方向成30°的夹角,由几何知识可知,L1=BO,已知BO=3AO,物体的质量m为6 kg,则物体的重力:G=mg=6 kg×10 N/kg=60 N,由杠杆的平衡条件得,G×L2=F×L1,即G×AO=F×BO,代入数据可得,60 N×AO=F××3AO,解得F=40 N。
14.1.5 360
O点为支点,地面对手臂的支持力为动力,当手臂与地面垂直时,动力臂是OB段的
距离,重力是阻力,阻力臂是OD段的距离,所以动力臂:OB=OD+DB=0.9 m+0.6 m=1.5 m;
人所受的重力为G=mg=60 kg×10 N/kg=600 N,根据杠杆的平衡条件可得,F×OB=G×OD,
即F×1.5 m=600 N×0.9 m,解得F=360 N。
15.由图可知,支点是O点,
肱二头肌对前臂产生的拉力F1为动力,
铅球的重力为阻力F2,
阻力:F2=G=mg=3 kg×10 N/kg=30 N,
由题知,L1=OA=0.03 m,L2=OB=0.30 m,
根据杠杆的平衡条件F1L1=F2L2可得,
F1×0.03 m=30 N×0.30 m,
解得F1=300 N。
16.(1)重心
(2)将质量为m的钩码挂在木尺左侧某一位置,移动木尺,直到木尺在支座上重新保持水平平衡
(3)杠杆平衡条件:动力×动力臂=阻力×阻力臂
第1课时 杠杆及其平衡条件
考点1 杠杆及其五要素
1.日常生活中的镊子是一种杠杆,如图所示,使用镊子夹取物体时,将手压在B处,则该杠杆的支点是 点,动力作用点是 点,阻力作用点是 点。
2.在如图所示的杠杆中,O点是 ,若重物G对杠杆的拉力是阻力,则F是 ,动力臂是 ,阻力臂是 。
3.如图所示,工人师傅将油桶推上台阶,下列说法中正确的是 ( )
A.这不能看作杠杆,因为油桶是圆的
B.这不能看作杠杆,因为没有支点
C.这可以看作杠杆,因为满足杠杆的所有条件
D.这可以看作杠杆,支点就是横截面的圆心
4.如图所示是同学们常用的燕尾夹,当用力按住N点打开该夹子时,中能正确表示该过程的MON杠杆的示意图是 ( )
(1)杠杆能绕某一固定点转动,且是硬棒;(2)动力和阻力使杠杆绕支点转动的方向相反;(3)杠杆不一定是直的,可以是各种形状。
考点2 力臂及其画法
5.关于力臂,下列说法中正确的是 ( )
A.力臂一定在杠杆上
B.力臂不可能等于零
C.从支点到动力作用点的距离叫动力臂
D.从支点到力的作用线的距离叫力臂
6.如图所示,小明在按压式订书机的N点施加压力,将订书钉订入M点下方的纸张中,中能正确表示他使用该订书机时的杠杆示意图的是 ( )
7.如图所示为用钓鱼竿钓鱼的示意图,O点为支点,请画出F1、F2的力臂L1和L2。
8. (2021广东)如图所示是人走路时的情形,人的脚可视为一种杠杆。请在图中画出动力F的力臂L。
力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点;②确定力的作用点和力的方向,画出力的作用线;③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
考点3 探究杠杆的平衡条件
9.(2021十堰)小红和小华在做探究杠杆平衡条件的实验时:
(1)实验前,把杠杆的中心支在支架上,杠杆静止在如甲所示的位置,小红将右端的平衡螺母向右调,小华认为也可以将左端的平衡螺母向 (选填“左”或“右”)调,使杠杆在水平位置平衡。
(2)实验中,小红多次在杠杆两端加挂钩码,并调节钩码的位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 。
(3)如图乙所示,始终保持杠杆在水平位置平衡,小红将弹簧测力计从①位置移动到②位置时,测力计的示数将 (选填“变大”“变小”或“不变”)。
10.(2021陕西)在“探究杠杆平衡条件”的实验中:
(1)为方便测量力臂,实验前应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡。
(2)如甲所示,此时杠杆处于平衡状态,如果在杠杆两侧各加挂一个相同的钩码,杠杆将 (选填“保持平衡”“顺时针转动”或“逆时针转动”)。
(3)如图乙所示是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到A点正上方的B点,力臂是线段 (选填“OA”“OB”或“AB”),此时杠杆 (选填“仍能”或“不能”)保持平衡。
11.小明同学做探究杠杆平衡条件的实验。
(1)小明通过实验,得出了如下表所示的数据,根据数据得出杠杆的平衡条件:动力+动力臂=阻力+阻力臂,你认为他的实验过程存在什么问题
请写出两点: ;
。
动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
4 5 5 4
(2)实验中,小明用如图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒他不要采用这种方式,主要是因为 。(填字母)
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)小明马上进行了改正,他不改变支点右侧所挂的两个钩码及其位置,保持左侧第 格的钩码不动,将支点左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
探究杠杆平衡条件的注意事项:
(1)实验前调节杠杆在水平位置平衡,目的是消除杠杆自重对实验的影响。
(2)实验过程中通过增减钩码或移动钩码位置,使杠杆在水平位置平衡,目的是便于直接读出力臂的大小。
考点4 杠杆平衡条件的计算
12.(2021齐齐哈尔)杠杆是我们生活中一种常见的简单机械,如图所示,轻质杠杆OA可绕O点转动(不计摩擦),在A点悬挂一个重为20 N的物体,在B点施加一个竖直向上的拉力F,使杠杆在水平位置平衡,且OB∶AB=2∶1,则拉力F= N。
13.如图所示,轻杆AB悬于O点,BO=3AO,其左端挂一质量为6 kg的物体,右端施加
一个与水平方向成30°夹角的力F,此时轻杆水平平衡。请画出力F的力臂,并算出其大小为
N。(g取10 N/kg)
14.如图所示,在做俯卧撑时,人体可看成一个杠杆,A点为重心,O点为支点,支撑点是B点,当手臂与地面垂直时,动力臂是 m;若人的质量是60 kg,则地面对双手的支持力为
N。(g取10 N/kg)
15.如甲所示为前臂平伸用手掌托住铅球时的情形。我们可将图甲简化成如图乙所示的杠杆,不计杠杆自重。若铅球质量m=3 kg,OA=0.03 m,OB=0.30 m,求此时肱二头肌对前臂产生的拉力F1的大小。(g取10 N/kg)
(1)确定杠杆支点的位置;(2)分清杠杆受到的动力和阻力,明确其大小和方向,并作出力的示意图;(3)确定每个力的力臂;(4)根据杠杆平衡条件列出关系式并分析求解。
16.小明想测量一把质地均匀的木尺的质量,器材有待测木尺、支座、带细线的质量为m的钩码。请你将下列实验步骤补充完整。
(1)如甲所示,将木尺平放在支座上,左右移动木尺,使木尺在水平位置平衡,记下使木尺平衡的这个支点O,这个支点就是木尺的 。
(2)如图乙所示, ,记录钩码悬挂点到支座的距离L1和支点O到支座的距离L2。
(3)根据 ,可以计算出木尺的质量m木尺= 。
答案
6.5 探究杠杆的平衡条件
第1课时 杠杆及其平衡条件
1.A B C
2.支点 动力 OA OB 3.C
4.A 由图可知,当用力按住N点打开该夹子时,其会绕着中间的固定点O转动,即O为支点,所按压的N点为动力F1的作用点,F1的方向向下;而杠杆MON受到向下的阻力F2,M点就是阻力F2的作用点,故A正确。
5.D
6.A
7.如图所示
8.如图所示
9.(1)右 (2)寻找普遍规律 (3)变大
10.(1)水平 (2)顺时针转动 (3)OA 仍能
11.(1)实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论 单位不同的两个物理量不能相加
(2)D
(3)2
(1)小明同学的结论:动力+动力臂=阻力+阻力臂,将单位不同的两个物理量相加,没有意义,且实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论。
(2)实验中,用如图所示的方式悬挂钩码,杠杆平衡是杠杆左侧多个力共同作用的结果,采用这种方式是不妥当的,这主要是因为杠杆上力和力臂数目过多。
(3)不改变支点右侧所挂的两个钩码及其位置,将左侧另外两个钩码改挂到第三个钩码的下方,即左侧的力等于三个钩码的重力,根据杠杆的平衡条件可知,应保持左侧第2格的钩码不动。
12.30 杠杆水平平衡时,A点受到的阻力为FA=G物=20 N,动力F的力臂为OB,阻力FA的力臂为OA,因为OB=2AB,所以OA=OB+AB=3AB,即OB∶OA=2∶3,由杠杆的平衡条件可得,拉力F===30 N。
13.如图所示 40
反向延长力F的作用线,过支点O作力F作用线的垂线段即为F的力臂L1,因为右端施加的力F与水平方向成30°的夹角,由几何知识可知,L1=BO,已知BO=3AO,物体的质量m为6 kg,则物体的重力:G=mg=6 kg×10 N/kg=60 N,由杠杆的平衡条件得,G×L2=F×L1,即G×AO=F×BO,代入数据可得,60 N×AO=F××3AO,解得F=40 N。
14.1.5 360
O点为支点,地面对手臂的支持力为动力,当手臂与地面垂直时,动力臂是OB段的
距离,重力是阻力,阻力臂是OD段的距离,所以动力臂:OB=OD+DB=0.9 m+0.6 m=1.5 m;
人所受的重力为G=mg=60 kg×10 N/kg=600 N,根据杠杆的平衡条件可得,F×OB=G×OD,
即F×1.5 m=600 N×0.9 m,解得F=360 N。
15.由图可知,支点是O点,
肱二头肌对前臂产生的拉力F1为动力,
铅球的重力为阻力F2,
阻力:F2=G=mg=3 kg×10 N/kg=30 N,
由题知,L1=OA=0.03 m,L2=OB=0.30 m,
根据杠杆的平衡条件F1L1=F2L2可得,
F1×0.03 m=30 N×0.30 m,
解得F1=300 N。
16.(1)重心
(2)将质量为m的钩码挂在木尺左侧某一位置,移动木尺,直到木尺在支座上重新保持水平平衡
(3)杠杆平衡条件:动力×动力臂=阻力×阻力臂