10.1《科学探究:杠杆的平衡条件》课件 年沪科版八年级物理全一册(共45张PPT)
文档属性
| 名称 | 10.1《科学探究:杠杆的平衡条件》课件 年沪科版八年级物理全一册(共45张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 13.1MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-08-13 00:00:00 | ||
图片预览




文档简介
(共45张PPT)
第十章 机械与人
第一节 科学探究:杠杆的平衡条件
“给我一个支点,我能翘起整个地球。”--阿基米德
投石机
舂
桔槔
古代的杠杆
扳手
裁纸机
踩踏式垃圾桶
生活中的杠杆
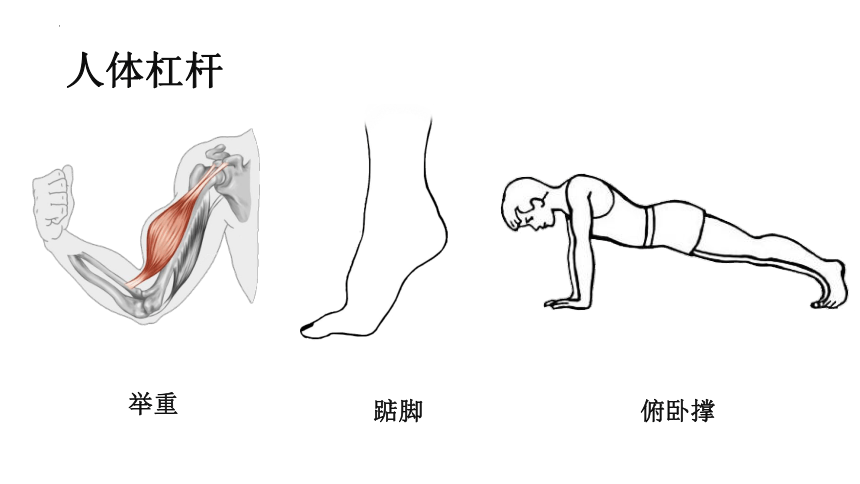
举重
踮脚
俯卧撑
人体杠杆
生活中将杠杆灵活组合的应用
钳子
核桃夹
指甲剪
衣服夹
镊子
筷子
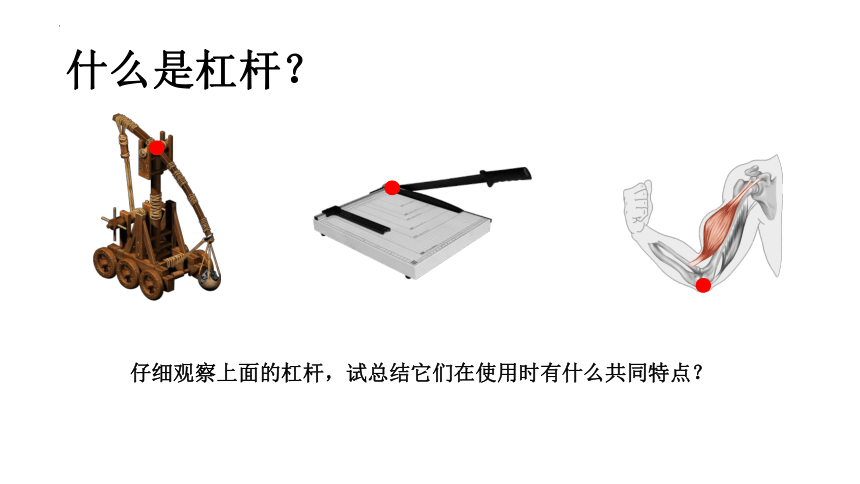
仔细观察上面的杠杆,试总结它们在使用时有什么共同特点?
什么是杠杆?
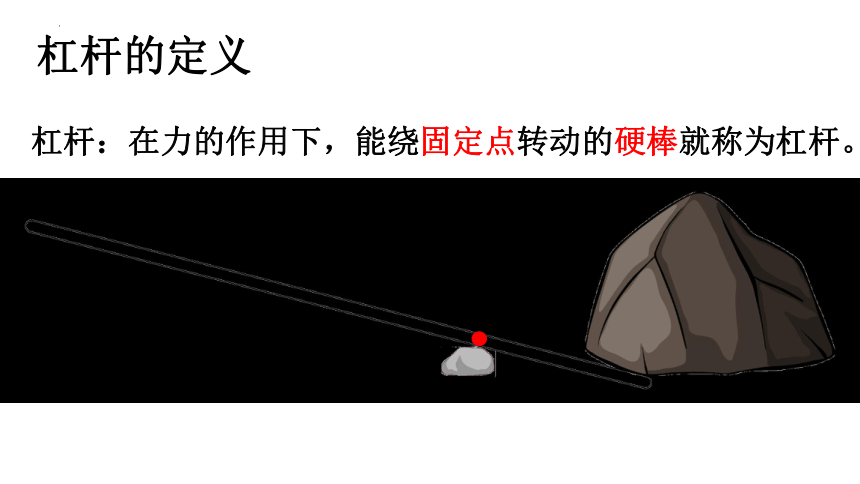
杠杆:在力的作用下,能绕固定点转动的硬棒就称为杠杆。
杠杆的定义
根据实际用途,杠杆的外形可以是多种多样的。
不是,“硬棒”甚至不一定是棒,这里的“硬棒”泛指一切有一定长度的刚体。
“硬棒”必须是直的吗?
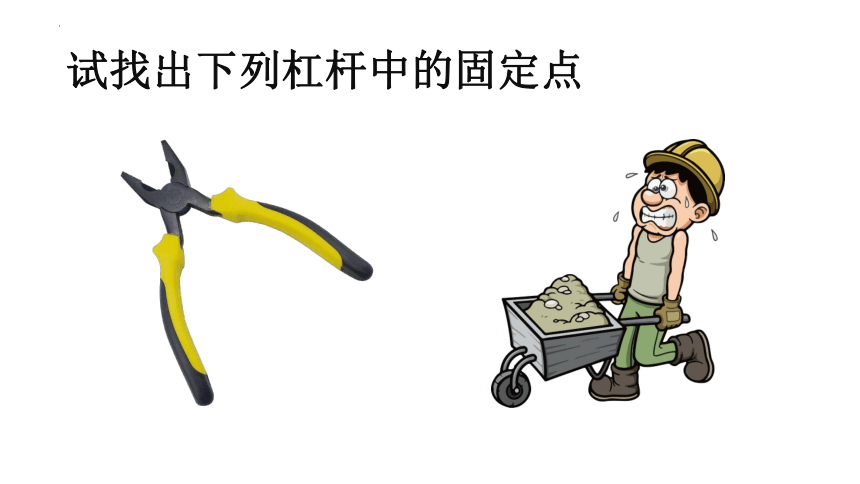
试找出下列杠杆中的固定点
试找出下列杠杆中的固定点
试找出下列杠杆中的固定点
支点:杠杆绕着转动的固定点(O)
动力:使杠杆转动的力(F1)
阻力:阻碍杠杆转动的力(F2)
动力臂:支点到动力作用线的距离(L1)
阻力臂:支点到阻力作用线的距离(L2)
F1
F2
L2
O
L1
注:
① 支点、动力和阻力的力的作用点一定在杠杆上
② 力臂不一定在杠杆上
力的作用线:通过力的作用点,沿力的方向所画的一条直线。
力的作用线
杠杆五要素
画出图中杠杆各力的力臂
F1
l1
l2
F2
O
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上字母l1或l2。(括母)
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
F2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
F2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
F2
F1
l1
l2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
F2
l2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l2
F1
l1
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
O
F1
F2
l2
l1
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
探究杠杆的平衡条件
物体的平衡状态
做匀速直线运动
保持静止
杠杆的平衡状态
保持静止
做匀速转动
称重时应怎样使杆秤保持平衡?
不断调节秤砣位置,使杆平衡
如果增加物品的质量,秤砣应该往哪移?
往右
秤砣往右移动改变了哪一因素?
力臂
猜想一下杠杆平衡的条件是什么呢?
思考:杆秤的平衡条件
提出问题:力和力臂的大小对杠杆平衡有什么影响?
猜想假设:
杠杆的平衡条件
带有刻度的杠杆
平衡螺母
平衡螺母
实验器材
1、实验前如何调节杠杆的平衡?
给杠杆增加
平衡螺母
制定计划与设计实验
调节方法:左偏右调
右偏左调
调节杠杆两端的螺母,使杠杆在水平位置平衡,目的:①便于测量力臂。② 消除杠杆重力对实验的影响。
使杠杆水平平衡,这样力臂就会落在杠杆上,然后在杠杆上均匀标记刻度。
2、实验中如何方便地改变动力和阻力的大小?
用钩码和
弹簧测力计
实验器材:杠杆、钩码、弹簧测力计、铁架台
测量的物理量:力的大小、力臂的长短
1、调节平衡螺母,使杠杆水平平衡。
进行实验与搜集数据
2、杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
3、改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
实验数据:
实验中多次测量的目的是什么?
寻找普遍性规律,避免结论的偶然性。
进行实验与搜集数据
我们的哪个猜想符合实验结果呢?
猜想4符合实验结果:
分析与论证
由实验可以得到杠杆平衡条件(阿基米德杠杆原理):
动力 X 动力臂=阻力 X 阻力臂
分析与论证
F1L1= F2L2
即:杠杆的平衡取决于力和力臂的乘积。
F1
L1
F2
L2
=
归纳结论:杠杆的平衡条件:
公式:F1×L1=F2×L2
或
即:力与力臂成反比。当杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之一。
乙
甲
做一做
1.把杠杆左边改用弹簧测力计竖直拉使其水平平衡(图甲),能否得出以上结论?
2.保持阻力F2及左右两边距离不变,用测力计斜拉杠杆仍使其水平平衡(图乙),你有什么发现?你认为发生这种现象的原因是什么
(F1变大了!)
图甲
图乙
O
L1
O
L1
仔细观察这些杠杆,看看它们各自的动力臂和阻力臂有什么关系?
我们身边有很多形式的杠杆
省力杠杆(费距离杠杆)
通过画力臂可知,用羊角锤拔钉子时,动力臂大于阻力臂,
根据杠杆平衡条件可知,动力比阻力小。
省力杠杆:
动力臂大于阻力臂;动力小于阻力
特点:
省力,但是费距离
我们在使用省力杠杆时,得到了省力的利益,同时付出了移动更远距离的代价。
省力杠杆
费力杠杆(省距离杠杆)
费力杠杆:
动力臂小于阻力臂;动力大于阻力
特点:
费力,但是省距离
使用镊子时,动力臂小于阻力臂,根据杠杆平衡条件可知,动力比阻力大
费力杠杆虽然费力,却省了动力端移动的距离。
费力杠杆
等臂杠杆
等臂杠杆:
动力臂等于阻力臂;动力等于阻力
特点:
不省力,也不省距离
托盘天平
物理天平
等臂杠杆
省力杠杆 费力杠杆 等臂杠杆
概念 动力臂大于阻力臂的杠杆 动力臂小于阻力臂的杠杆 动力臂等于阻力臂的杠杆
特点 省力,但费距离 费力,但省距离 既不省力,也不省距离
实例 羊角锤、撬棒、 铡刀、剪铁的剪子 钓鱼竿、镊子、船桨、起重机的吊臂 天平、定滑轮等
三类杠杆对比
杠杆
平衡状态:
平衡条件:
静止状态、匀速转动
F1 l1=F2 l2
分 类
小结:
应用:
若l1>l2,则F1<F2
若l1=l2,则F1 =F2
若l1<l2,则F1>F2
省力杠杆
等臂杠杆
费力杠杆
判断杠杆的类型,实际就是比较动力臂和阻力臂的大小
杆秤、钳子、剪刀、羊角锤等
本节小结
第十章 机械与人
第一节 科学探究:杠杆的平衡条件
“给我一个支点,我能翘起整个地球。”--阿基米德
投石机
舂
桔槔
古代的杠杆
扳手
裁纸机
踩踏式垃圾桶
生活中的杠杆
举重
踮脚
俯卧撑
人体杠杆
生活中将杠杆灵活组合的应用
钳子
核桃夹
指甲剪
衣服夹
镊子
筷子
仔细观察上面的杠杆,试总结它们在使用时有什么共同特点?
什么是杠杆?
杠杆:在力的作用下,能绕固定点转动的硬棒就称为杠杆。
杠杆的定义
根据实际用途,杠杆的外形可以是多种多样的。
不是,“硬棒”甚至不一定是棒,这里的“硬棒”泛指一切有一定长度的刚体。
“硬棒”必须是直的吗?
试找出下列杠杆中的固定点
试找出下列杠杆中的固定点
试找出下列杠杆中的固定点
支点:杠杆绕着转动的固定点(O)
动力:使杠杆转动的力(F1)
阻力:阻碍杠杆转动的力(F2)
动力臂:支点到动力作用线的距离(L1)
阻力臂:支点到阻力作用线的距离(L2)
F1
F2
L2
O
L1
注:
① 支点、动力和阻力的力的作用点一定在杠杆上
② 力臂不一定在杠杆上
力的作用线:通过力的作用点,沿力的方向所画的一条直线。
力的作用线
杠杆五要素
画出图中杠杆各力的力臂
F1
l1
l2
F2
O
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上字母l1或l2。(括母)
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
F2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
F2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
F2
F1
l1
l2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
F2
l2
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l2
F1
l1
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
O
F1
F2
l2
l1
1、确定支点O;(定支)
2、沿力的方向画力的作用线,;(有时需延长用虚线);(延力)
3、从支点向力的作用线作垂线,
标垂足,垂线用虚线;(作垂)
4、用大括号标明力臂,并在旁边标上 字母l1或l2 (括母)
l1
l2
探究杠杆的平衡条件
物体的平衡状态
做匀速直线运动
保持静止
杠杆的平衡状态
保持静止
做匀速转动
称重时应怎样使杆秤保持平衡?
不断调节秤砣位置,使杆平衡
如果增加物品的质量,秤砣应该往哪移?
往右
秤砣往右移动改变了哪一因素?
力臂
猜想一下杠杆平衡的条件是什么呢?
思考:杆秤的平衡条件
提出问题:力和力臂的大小对杠杆平衡有什么影响?
猜想假设:
杠杆的平衡条件
带有刻度的杠杆
平衡螺母
平衡螺母
实验器材
1、实验前如何调节杠杆的平衡?
给杠杆增加
平衡螺母
制定计划与设计实验
调节方法:左偏右调
右偏左调
调节杠杆两端的螺母,使杠杆在水平位置平衡,目的:①便于测量力臂。② 消除杠杆重力对实验的影响。
使杠杆水平平衡,这样力臂就会落在杠杆上,然后在杠杆上均匀标记刻度。
2、实验中如何方便地改变动力和阻力的大小?
用钩码和
弹簧测力计
实验器材:杠杆、钩码、弹簧测力计、铁架台
测量的物理量:力的大小、力臂的长短
1、调节平衡螺母,使杠杆水平平衡。
进行实验与搜集数据
2、杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
3、改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
实验数据:
实验中多次测量的目的是什么?
寻找普遍性规律,避免结论的偶然性。
进行实验与搜集数据
我们的哪个猜想符合实验结果呢?
猜想4符合实验结果:
分析与论证
由实验可以得到杠杆平衡条件(阿基米德杠杆原理):
动力 X 动力臂=阻力 X 阻力臂
分析与论证
F1L1= F2L2
即:杠杆的平衡取决于力和力臂的乘积。
F1
L1
F2
L2
=
归纳结论:杠杆的平衡条件:
公式:F1×L1=F2×L2
或
即:力与力臂成反比。当杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之一。
乙
甲
做一做
1.把杠杆左边改用弹簧测力计竖直拉使其水平平衡(图甲),能否得出以上结论?
2.保持阻力F2及左右两边距离不变,用测力计斜拉杠杆仍使其水平平衡(图乙),你有什么发现?你认为发生这种现象的原因是什么
(F1变大了!)
图甲
图乙
O
L1
O
L1
仔细观察这些杠杆,看看它们各自的动力臂和阻力臂有什么关系?
我们身边有很多形式的杠杆
省力杠杆(费距离杠杆)
通过画力臂可知,用羊角锤拔钉子时,动力臂大于阻力臂,
根据杠杆平衡条件可知,动力比阻力小。
省力杠杆:
动力臂大于阻力臂;动力小于阻力
特点:
省力,但是费距离
我们在使用省力杠杆时,得到了省力的利益,同时付出了移动更远距离的代价。
省力杠杆
费力杠杆(省距离杠杆)
费力杠杆:
动力臂小于阻力臂;动力大于阻力
特点:
费力,但是省距离
使用镊子时,动力臂小于阻力臂,根据杠杆平衡条件可知,动力比阻力大
费力杠杆虽然费力,却省了动力端移动的距离。
费力杠杆
等臂杠杆
等臂杠杆:
动力臂等于阻力臂;动力等于阻力
特点:
不省力,也不省距离
托盘天平
物理天平
等臂杠杆
省力杠杆 费力杠杆 等臂杠杆
概念 动力臂大于阻力臂的杠杆 动力臂小于阻力臂的杠杆 动力臂等于阻力臂的杠杆
特点 省力,但费距离 费力,但省距离 既不省力,也不省距离
实例 羊角锤、撬棒、 铡刀、剪铁的剪子 钓鱼竿、镊子、船桨、起重机的吊臂 天平、定滑轮等
三类杠杆对比
杠杆
平衡状态:
平衡条件:
静止状态、匀速转动
F1 l1=F2 l2
分 类
小结:
应用:
若l1>l2,则F1<F2
若l1=l2,则F1 =F2
若l1<l2,则F1>F2
省力杠杆
等臂杠杆
费力杠杆
判断杠杆的类型,实际就是比较动力臂和阻力臂的大小
杆秤、钳子、剪刀、羊角锤等
本节小结
同课章节目录
- 第一章 打开物理世界的大门
- 第一节 走进神奇
- 第二节 探索之路
- 第三节 站在巨人的肩膀上
- 第二章 运动的世界
- 第一节 动与静
- 第二节 长度与时间的测量
- 第三节 快与慢
- 第四节 科学探究:速度的变化
- 第三章 声的世界
- 第一节 科学探究:声音的产生与传播
- 第二节 声音的特性
- 第三节 超声与次声
- 第四章 多彩的光
- 第一节 光的反射
- 第二节 平面镜成像
- 第三节 光的折射
- 第四节 光的色散
- 第五节 科学探究:凸透镜成像
- 第六节 神奇的眼睛
- 第五章 质量与密度
- 第一节 质量
- 第二节 学习使用天平和量筒
- 第三节 科学探究:物质的密度
- 第四节 密度知识的应用
- 第六章 熟悉而陌生的力
- 第一节 力
- 第二节 怎样描述力
- 第三节 弹力与弹簧测力计
- 第四节 来自地球的力
- 第五节 科学探究:摩擦力
- 第七章 力与运动
- 第一节 科学探究:牛顿第一定律
- 第二节 力的合成
- 第三节 力的平衡
- 第八章 压强
- 第一节 压力的作用效果
- 第二节 科学探究:液体的压强
- 第三节 空气的“力量”
- 第四节 流体压强与流速的关系
- 第九章 浮力
- 第一节 认识浮力
- 第二节 阿基米德原理
- 第三节 物体的浮与沉
- 第十章 机械与人
- 第一节 科学探究:杠杆的平衡条件
- 第二节 滑轮及其应用
- 第三节 做功了吗
- 第四节 做功的快慢
- 第五节 机械效率
- 第六节 合理利用机械能
- 第十一章 小粒子与大宇宙
- 第一节 走进微观
- 第二节 看不见的运动
- 第三节 探索宇宙