第一课《仿真体验使用超声波传感器》(课件)六年级下册信息技术中国工信出版社(15PPT)
文档属性
| 名称 | 第一课《仿真体验使用超声波传感器》(课件)六年级下册信息技术中国工信出版社(15PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 84.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2022-10-01 00:00:00 | ||
图片预览
文档简介
(共15张PPT)
仿真体验使用超声波传感器
学情分析
教学目标
教学重点、难点
板书设计
教学重点、难点
教材分析
认识智能机器人,了解智能机器人的相关概念、分类、应用与发展,尝试设计、制作简易教学机器人。
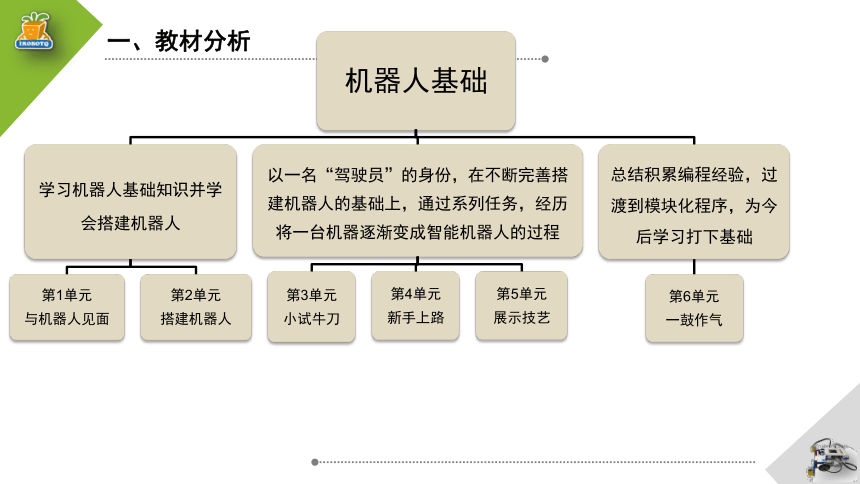
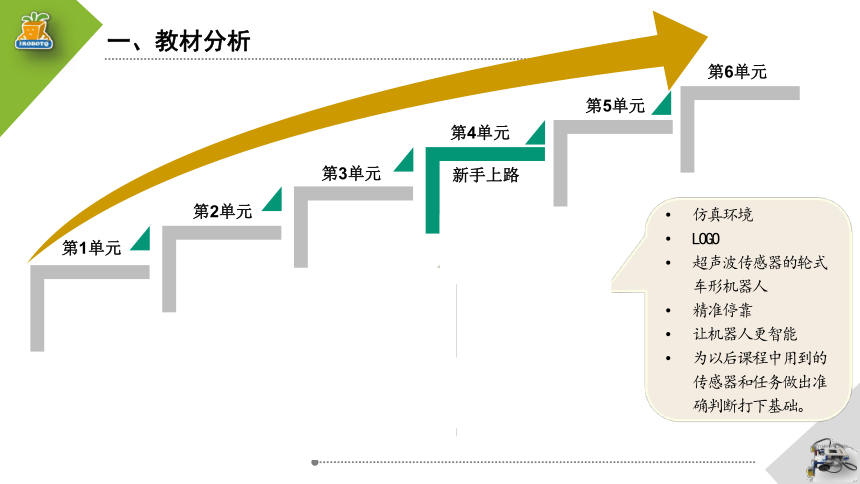
一、教材分析
一、教材分析
第2单元
第1单元
新手上路
第3单元
第4单元
第5单元
第6单元
仿真环境
LOGO
超声波传感器的轮式车形机器人
精准停靠
让机器人更智能
为以后课程中用到的传感器和任务做出准确判断打下基础。
传感器的工作原理
在IRobotQ3D中给机器人添加传感器
仿真体验使用传感器
学习实践
仿真体验使用
超声波传感器
(精准停靠)
仿真体验使用
灰度传感器
(遵守交规)
一、教材分析
二、学情分析
乌鲁木齐八一中学附小六年级学生
接受信息技术能力强
对智能机器人既熟悉又陌生
接触过Scratch可视化编程语言,对程序有一定的概念
对软件学习有迁移能力
可能存在的困难有:
1、用LOGO语言编写程序指挥机器人运行不太顺利
2、对递归调用、条件判断语句的理解及程序的输入上存在困难。
能够依据仿真场景编写程序及仿真调试,完成“精准停靠”任务,让机器人更加智能。
通过对仿真场景的分析和判断,培养学生发现问题、解决问题的能力,并体验编写程序的乐趣,激发学习机器人的兴趣。
根据超声波传感器的功能编写程序,学习在仿真环境中使用超声波传感器。
三、教学目标
相互联系
相互促进
四、教学重点、难点
重点
分析和判断仿真场景,编写程序、仿真调试,完成“精准停靠”任务
难点
运用递归调用、条件判断语句
五、教学过程
创
设
情
境
、
启
发
思
考
1
(1)、课始采用问题引导法,针对课题提问。
(2)、播放“精准停靠”仿真视频,出示其仿真场地示意图,请学生回答问题。
(2)、板书LOGO语言编写程序的一般步骤。
分析任务
确定算法
编写程序
仿真调试
(1)、提出程序的“灵魂”地位;用LOGO语言编写程序,指挥机器人完成任务。
五、教学过程
模仿应用、探索实践
2
五、教学过程
模仿应用、探索实践
2
五、教学过程
模仿应用、探索实践
2
流程图
递归调用
条件判断语句
总结迁移
3
五、教学过程
(1)、思考超声波传感器在生活中有哪些应用?
(2)、你想利用超声波传感器搭建什么机器人、解决生活中的什么问题?
六、板书设计
谢谢!
仿真体验使用超声波传感器
学情分析
教学目标
教学重点、难点
板书设计
教学重点、难点
教材分析
认识智能机器人,了解智能机器人的相关概念、分类、应用与发展,尝试设计、制作简易教学机器人。
一、教材分析
一、教材分析
第2单元
第1单元
新手上路
第3单元
第4单元
第5单元
第6单元
仿真环境
LOGO
超声波传感器的轮式车形机器人
精准停靠
让机器人更智能
为以后课程中用到的传感器和任务做出准确判断打下基础。
传感器的工作原理
在IRobotQ3D中给机器人添加传感器
仿真体验使用传感器
学习实践
仿真体验使用
超声波传感器
(精准停靠)
仿真体验使用
灰度传感器
(遵守交规)
一、教材分析
二、学情分析
乌鲁木齐八一中学附小六年级学生
接受信息技术能力强
对智能机器人既熟悉又陌生
接触过Scratch可视化编程语言,对程序有一定的概念
对软件学习有迁移能力
可能存在的困难有:
1、用LOGO语言编写程序指挥机器人运行不太顺利
2、对递归调用、条件判断语句的理解及程序的输入上存在困难。
能够依据仿真场景编写程序及仿真调试,完成“精准停靠”任务,让机器人更加智能。
通过对仿真场景的分析和判断,培养学生发现问题、解决问题的能力,并体验编写程序的乐趣,激发学习机器人的兴趣。
根据超声波传感器的功能编写程序,学习在仿真环境中使用超声波传感器。
三、教学目标
相互联系
相互促进
四、教学重点、难点
重点
分析和判断仿真场景,编写程序、仿真调试,完成“精准停靠”任务
难点
运用递归调用、条件判断语句
五、教学过程
创
设
情
境
、
启
发
思
考
1
(1)、课始采用问题引导法,针对课题提问。
(2)、播放“精准停靠”仿真视频,出示其仿真场地示意图,请学生回答问题。
(2)、板书LOGO语言编写程序的一般步骤。
分析任务
确定算法
编写程序
仿真调试
(1)、提出程序的“灵魂”地位;用LOGO语言编写程序,指挥机器人完成任务。
五、教学过程
模仿应用、探索实践
2
五、教学过程
模仿应用、探索实践
2
五、教学过程
模仿应用、探索实践
2
流程图
递归调用
条件判断语句
总结迁移
3
五、教学过程
(1)、思考超声波传感器在生活中有哪些应用?
(2)、你想利用超声波传感器搭建什么机器人、解决生活中的什么问题?
六、板书设计
谢谢!
同课章节目录