5.2.1三角函数的概念课件-2022-2023学年高一上学期数学人教A版(2019)必修第一册(共39张PPT)
文档属性
| 名称 | 5.2.1三角函数的概念课件-2022-2023学年高一上学期数学人教A版(2019)必修第一册(共39张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 8.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教A版(2019) | ||
| 科目 | 数学 | ||
| 更新时间 | 2022-12-14 00:00:00 | ||
图片预览

文档简介
(共39张PPT)
前面我们已经研究了函数的一般概念、幂函数、
指数函数和对数函数,基本按照“背景——概念—
—图象与性质——应用”路径进行探究。
今天我们继续按照研究函数的一般套路来展开探究。
我们知道,函数是描述客观世界运动变化规律的数学模型。
如:直线运动-----一次函数;抛物运动-----二次函数;
指数爆炸-----指数函数;对数增长-----对数函数;
那么圆周运动-----用什么函数模型刻画呢?
提出问题,引导探索
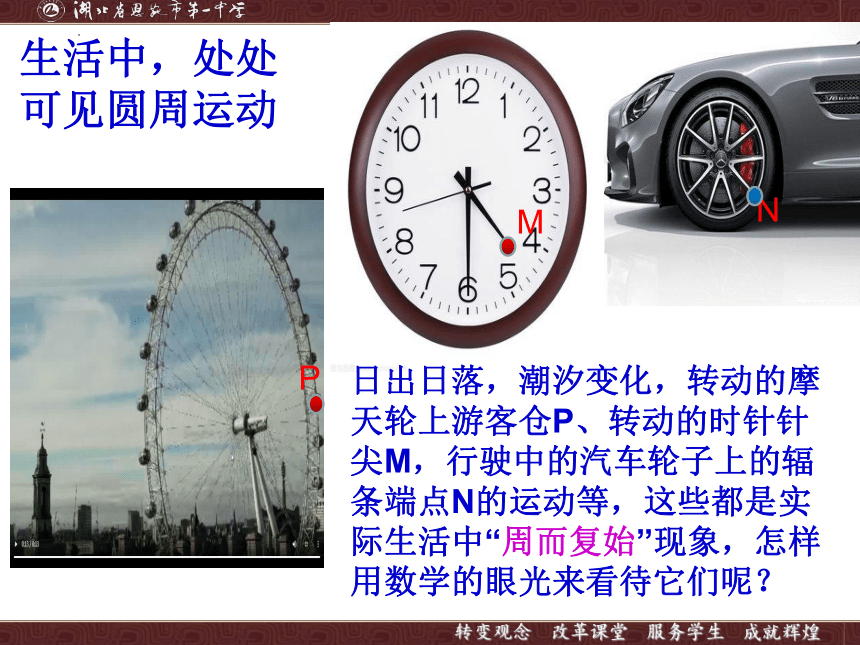
生活中,处处可见圆周运动
日出日落,潮汐变化,转动的摩天轮上游客仓P、转动的时针针尖M,行驶中的汽车轮子上的辐条端点N的运动等,这些都是实际生活中“周而复始’’现象,怎样用数学的眼光来看待它们呢?
P
N
M
P
O
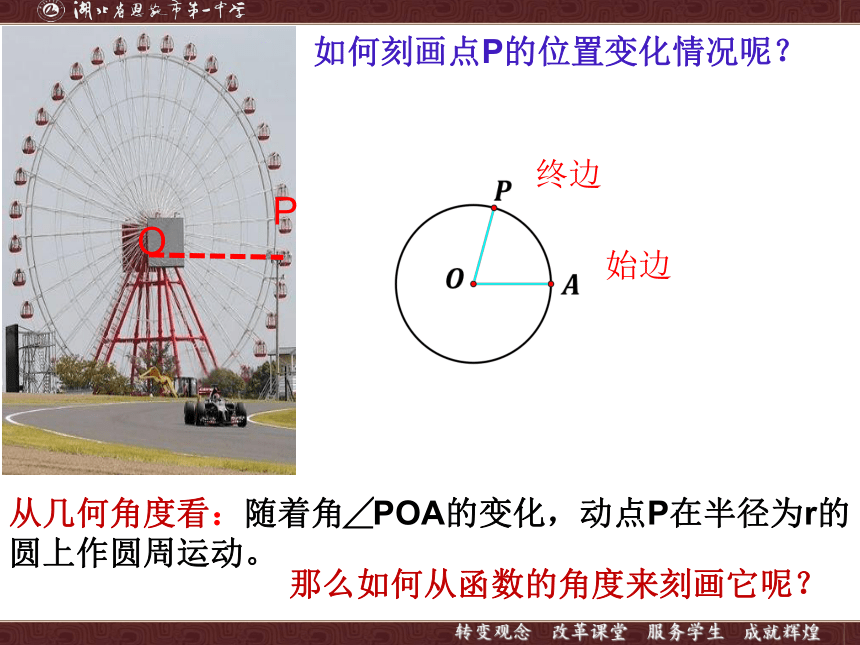
如何刻画点P的位置变化情况呢?
终边
始边
从几何角度看:随着角 POA的变化,动点P在半径为r的圆上作圆周运动。
那么如何从函数的角度来刻画它呢?
三角函数的概念
学习目标
1.借助单位圆理解并掌握任意角的三角函数的定义.
2.掌握利用诱导公式一求给定角的三角函数值并能确定函数值的符号.
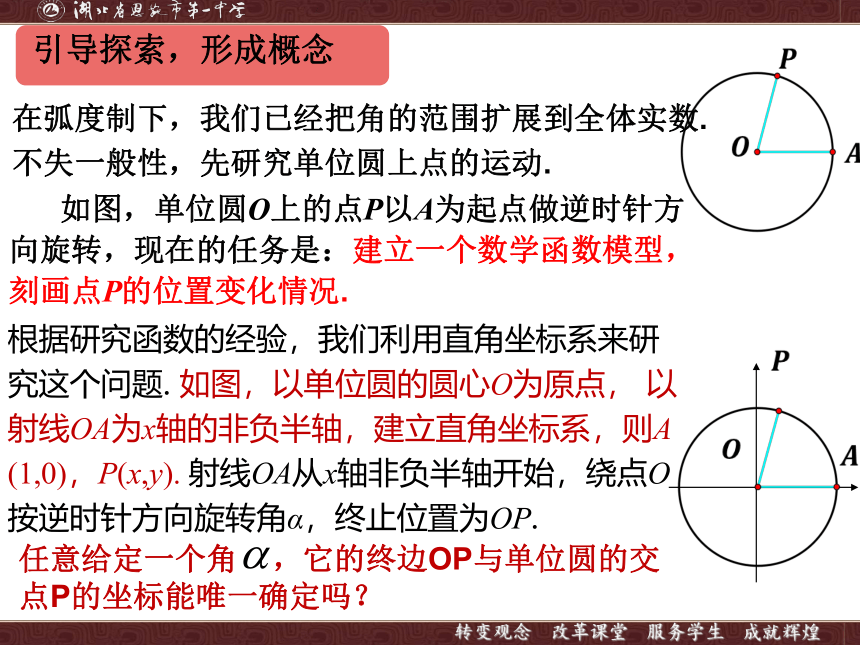
根据研究函数的经验,我们利用直角坐标系来研究这个问题. 如图,以单位圆的圆心O为原点, 以射线OA为x轴的非负半轴,建立直角坐标系,则A(1,0),P(x,y). 射线OA从x轴非负半轴开始,绕点O按逆时针方向旋转角α,终止位置为OP.
如图,单位圆O上的点P以A为起点做逆时针方向旋转,现在的任务是:建立一个数学函数模型,刻画点P的位置变化情况.
引导探索,形成概念
在弧度制下,我们已经把角的范围扩展到全体实数. 不失一般性,先研究单位圆上点的运动.
任意给定一个角 ,它的终边OP与单位圆的交点P的坐标能唯一确定吗?
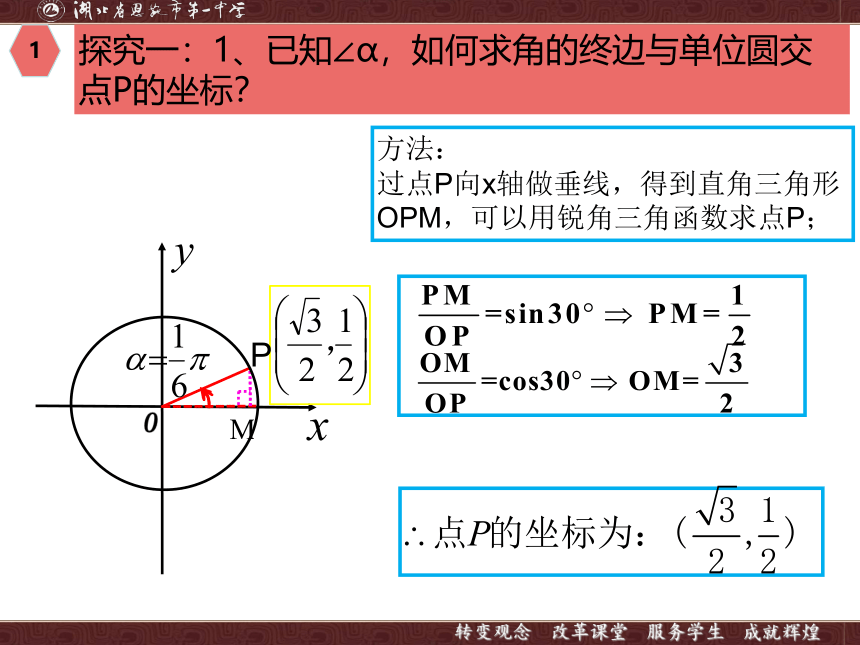
探究一:1、已知∠α,如何求角的终边与单位圆交点P的坐标?
方法:
过点P向x轴做垂线,得到直角三角形
OPM,可以用锐角三角函数求点P;
P
1
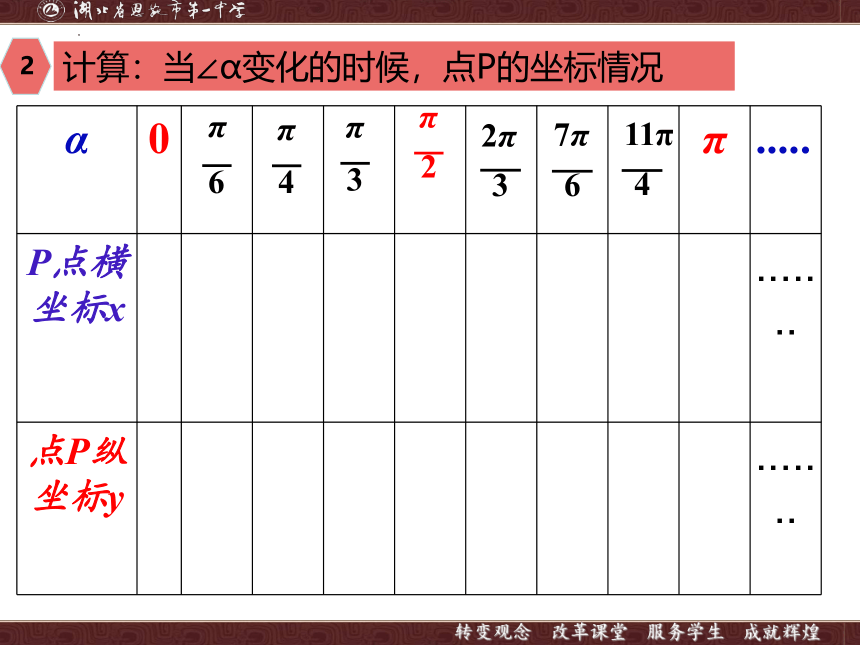
计算:当∠α变化的时候,点P的坐标情况
α 0 π .....
P点横坐标x .......
点P纵坐标y .......
π
6
π
4
π
3
2π
3
7π
6
11π
4
π
2
2
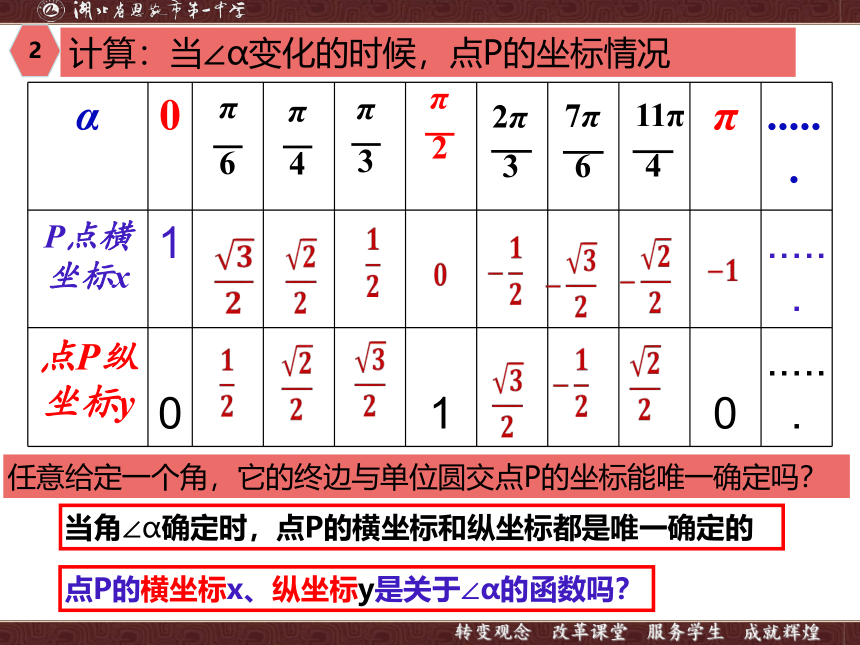
计算:当∠α变化的时候,点P的坐标情况
2
α 0 π ......
P点横坐标x 1 ......
点P纵坐标y 0 1 0 ......
π
6
π
4
π
3
2π
3
7π
6
11π
4
π
2
任意给定一个角,它的终边与单位圆交点P的坐标能唯一确定吗?
当角∠α确定时,点P的横坐标和纵坐标都是唯一确定的
点P的横坐标x、纵坐标y是关于∠α的函数吗?
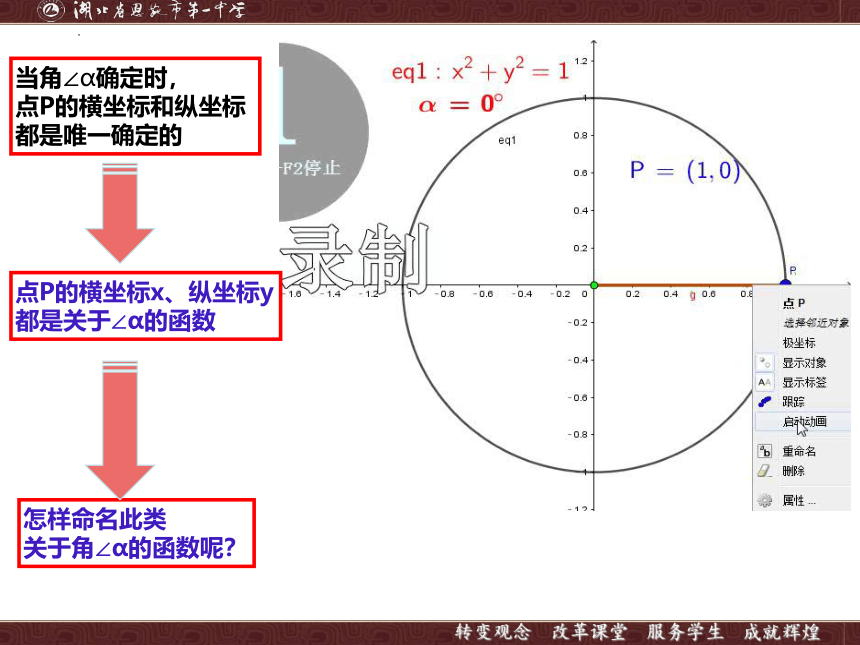
当角∠α确定时,
点P的横坐标和纵坐标
都是唯一确定的
点P的横坐标x、纵坐标y
都是关于∠α的函数
怎样命名此类
关于角∠α的函数呢?
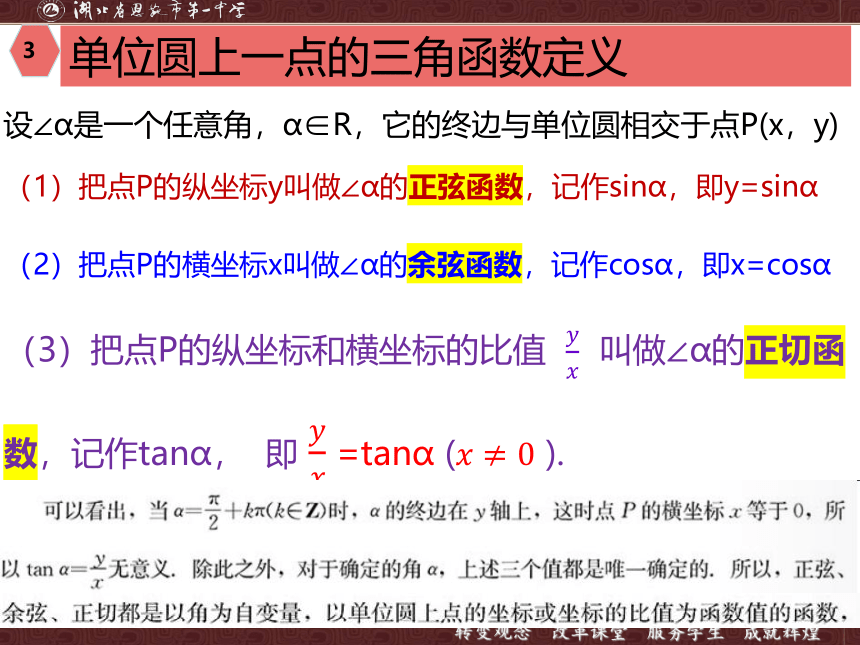
单位圆上一点的三角函数定义
设∠α是一个任意角,α∈R,它的终边与单位圆相交于点P(x,y)
(1)把点P的纵坐标y叫做∠α的正弦函数,记作sinα,即y=sinα
(2)把点P的横坐标x叫做∠α的余弦函数,记作cosα,即x=cosα
(3)把点P的纵坐标和横坐标的比值 叫做∠α的正切函数,记作tanα, 即 =tanα ( ).
我们把正弦函数、余弦函数和正切函数统称为三角函数.
3
注意:无论角a是第几象限角,它的三角函数的定义都是一样。
说明
(1)正弦值就是交点P的纵坐标,余弦值就是交点P的横坐标,正切值就是交点P的纵坐标与横坐标的比值.
(2)正弦、余弦总有意义.当 的终边在 轴上时,点P 的横坐标等于0,
无意义,此时
(3)由于角的集合与实数集之间可以建立一一对应关系,三角函数可以看成是自变量为实数的函数.
x
y
o
的终边
习惯上,我们用 x 表示自变量,y 表示因变量。通常将它们记为:
正弦函数 y=sin x,x∈R;
余弦函数 y=cos x,x∈R;
正切函数 y=tan x,x≠+kπ(k∈Z).
知识回顾:在初中我们是如何定义锐角三角函数的?
O
a
b
M
P
c
探究一、任意角三角函数与锐角三角函数的关系
1、锐角三角函数是研究三角形各种几何量之间的关系而发展起来的,是解三角形的工具;任意角三角函数是研究现实中的周期现象而发展起来的,核心是周期性。它们研究的对象不同,具有的性质也不同。
2、锐角三角函数载体是直角三角形;任意角三角函数研究的载体是单位圆,突出了圆的几何性质,它是三角形的代数化。只有角的范围在(0, )内,二者间有明显联系。
π
2
例1,利用三角函数的定义求 的正弦值、余弦值和正切值
学以致用
归纳:利用单位圆求任意角三角函数值的一般步骤
①把角放在平面直角坐标系中
②画出直角三角形
③求出角的终边与单位圆的交点坐标
④利用定义来确定三角函数的值
例2、如图,∠α是一个任意角,它的终边上任意一点P(不与原点O重合)的坐标为(x,y),点P与原点的距离为r;
求证:
证明
设∠α的终边与单位圆交于点P0(x0,y0),分别过点P,P0作x轴的垂线PM,P0M0,垂足分别为M,M0,则:
由此可知,只要知道∠α终边上任意一点P的坐标,就可以求得∠α的三个三角函数值。
α
终边上任一点三角函数定义:
归纳
解:
由题意可得
P180页题3:已知∠α的终边过点P(-12,5),求∠α的三角函数值.
学以致用
跟踪训练1
√
√
x=-1.
如图,以圆心O为原点, 以射线OA为x轴的非负半轴,建立直角坐标系,则A(r,0),P(x,y). 射线OA从x轴非负半轴开始,绕点O按逆时针方向旋转角α,终止位置为OP.圆O上的点P以A为起点做逆时针方向旋转,可以建立一个三角函数模型,刻画点P的位置变化情况.
探究三 从函数角度如何刻画动点P的位置变化情况
在弧度制下,我们已经把角的范围扩展到全体实数. 不失一般性,研究任意圆上动点P的运动.
即:
2.导图梳理:
归纳、总结
1.任意角的三角函数定义的关键是什么?如何开展研究?体现了哪些思想方法?
α 0 π
sinα
cosα
tanα
π
2
3π
2
π
6
π
4
π
3
2π
3
3π
4
5π
6
牢记常见的三角函数值,解决问题事半功倍!
常见角的三角函数值
无
无
π
2
学习了三角函数定义,接下来研究他们的一些性质。
R
R
角α的正弦函数值的符号取决于它的终边上任意一点的纵坐标的符号;角α的余弦函数值的符号取决于它的终边上任意一点的横坐标的符号;角α的正弦函数值的符号取决于它的终边上任意一点横纵坐标的是否同号。
既然我们是在直角坐标系内给三角函数下了定义,我们知道,点的坐标在每个象限内正负会发生变化,请思考,那么在每个象限内三角函数符号有什么变化?
三角函数值的符号规律
+
+
+
+
+
-
-
-
-
-
-
也可以用定义记忆
一全正,二正弦,三正切,四余弦
证明:必要性:显然。
充分性:因为成立,所以角的终边可能在第三或第四象限,也可能与y轴的负半轴重合;
又因为成立,所以角的终边可能在第一或第三象限;
因此角的终边只能在第三象限,于是角为第三象限角。
例4、确定下列三角函数值的符号:
(1)
(2);
(3);
(4).
负
负
正
0
判断三角函数值符号的两个步骤
(1)定象限:确定角α所在的象限.
(2)定符号:利用三角函数值的符号规律,即“一全正,二正弦,三正切,四余弦”来判断.
反思感悟
例2
A.第一象限角 B.第二象限角
C.第三象限角 D.第四象限角
√
(2)(多选)下列选项中,符号为负的是
A.sin(-100°) B.cos(-220°)
C.tan 10 D.cos π
√
√
√
由三角函数的定义,可以知道:
终边相同的角的同一三角函数的值相等。
其中。
公
式
一
即角的终边每绕原点旋转一周,函数值将重复出现,三角函数有“周而复始”的变化规律。
利用公式一,可将求任意角的三角函数值,转化为求0~ (或0°~360°)范围内的三角函数值.
例5、求下列三角函数值:
(1)
(2);
(3)
(1)
反思感悟
利用诱导公式一进行化简求值的步骤
(1)定形:将已知的任意角写成α+2kπ(或(k∈Z)的形式.
(2)转化:根据诱导公式一,转化为求角α的某个三角函数值.
(3)求值:若角为特殊角,可直接求出该角的三角函数值.
计算下列各式的值:
(1)sin(-1 395°)cos 1 110°+cos(-1 020°)sin 750°;
例3
原式=sin(-4×360°+45°)cos(3×360°+30°)+cos(-3×360°+60°)sin(2×360°+30°)
=sin 45°cos 30°+cos 60°sin 30°
计算下列各式的值:
(1)tan 405°-sin 450°+cos 750°;
跟踪训练3
原式=tan(360°+45°)-sin(360°+90°)+cos(2×360°+30°)
=tan 45°-sin 90°+cos 30°
课堂
小结
1.知识清单:
(1)三角函数的定义及求法.
(2)三角函数值在各象限内的符号.
(3)诱导公式一.
2.方法归纳:由特殊到一般、转化与化归、分类讨论.
3.常见误区:三角函数值的大小只与角的大小有关,与终边上的点无关;正切函数的定义域为
前面我们已经研究了函数的一般概念、幂函数、
指数函数和对数函数,基本按照“背景——概念—
—图象与性质——应用”路径进行探究。
今天我们继续按照研究函数的一般套路来展开探究。
我们知道,函数是描述客观世界运动变化规律的数学模型。
如:直线运动-----一次函数;抛物运动-----二次函数;
指数爆炸-----指数函数;对数增长-----对数函数;
那么圆周运动-----用什么函数模型刻画呢?
提出问题,引导探索
生活中,处处可见圆周运动
日出日落,潮汐变化,转动的摩天轮上游客仓P、转动的时针针尖M,行驶中的汽车轮子上的辐条端点N的运动等,这些都是实际生活中“周而复始’’现象,怎样用数学的眼光来看待它们呢?
P
N
M
P
O
如何刻画点P的位置变化情况呢?
终边
始边
从几何角度看:随着角 POA的变化,动点P在半径为r的圆上作圆周运动。
那么如何从函数的角度来刻画它呢?
三角函数的概念
学习目标
1.借助单位圆理解并掌握任意角的三角函数的定义.
2.掌握利用诱导公式一求给定角的三角函数值并能确定函数值的符号.
根据研究函数的经验,我们利用直角坐标系来研究这个问题. 如图,以单位圆的圆心O为原点, 以射线OA为x轴的非负半轴,建立直角坐标系,则A(1,0),P(x,y). 射线OA从x轴非负半轴开始,绕点O按逆时针方向旋转角α,终止位置为OP.
如图,单位圆O上的点P以A为起点做逆时针方向旋转,现在的任务是:建立一个数学函数模型,刻画点P的位置变化情况.
引导探索,形成概念
在弧度制下,我们已经把角的范围扩展到全体实数. 不失一般性,先研究单位圆上点的运动.
任意给定一个角 ,它的终边OP与单位圆的交点P的坐标能唯一确定吗?
探究一:1、已知∠α,如何求角的终边与单位圆交点P的坐标?
方法:
过点P向x轴做垂线,得到直角三角形
OPM,可以用锐角三角函数求点P;
P
1
计算:当∠α变化的时候,点P的坐标情况
α 0 π .....
P点横坐标x .......
点P纵坐标y .......
π
6
π
4
π
3
2π
3
7π
6
11π
4
π
2
2
计算:当∠α变化的时候,点P的坐标情况
2
α 0 π ......
P点横坐标x 1 ......
点P纵坐标y 0 1 0 ......
π
6
π
4
π
3
2π
3
7π
6
11π
4
π
2
任意给定一个角,它的终边与单位圆交点P的坐标能唯一确定吗?
当角∠α确定时,点P的横坐标和纵坐标都是唯一确定的
点P的横坐标x、纵坐标y是关于∠α的函数吗?
当角∠α确定时,
点P的横坐标和纵坐标
都是唯一确定的
点P的横坐标x、纵坐标y
都是关于∠α的函数
怎样命名此类
关于角∠α的函数呢?
单位圆上一点的三角函数定义
设∠α是一个任意角,α∈R,它的终边与单位圆相交于点P(x,y)
(1)把点P的纵坐标y叫做∠α的正弦函数,记作sinα,即y=sinα
(2)把点P的横坐标x叫做∠α的余弦函数,记作cosα,即x=cosα
(3)把点P的纵坐标和横坐标的比值 叫做∠α的正切函数,记作tanα, 即 =tanα ( ).
我们把正弦函数、余弦函数和正切函数统称为三角函数.
3
注意:无论角a是第几象限角,它的三角函数的定义都是一样。
说明
(1)正弦值就是交点P的纵坐标,余弦值就是交点P的横坐标,正切值就是交点P的纵坐标与横坐标的比值.
(2)正弦、余弦总有意义.当 的终边在 轴上时,点P 的横坐标等于0,
无意义,此时
(3)由于角的集合与实数集之间可以建立一一对应关系,三角函数可以看成是自变量为实数的函数.
x
y
o
的终边
习惯上,我们用 x 表示自变量,y 表示因变量。通常将它们记为:
正弦函数 y=sin x,x∈R;
余弦函数 y=cos x,x∈R;
正切函数 y=tan x,x≠+kπ(k∈Z).
知识回顾:在初中我们是如何定义锐角三角函数的?
O
a
b
M
P
c
探究一、任意角三角函数与锐角三角函数的关系
1、锐角三角函数是研究三角形各种几何量之间的关系而发展起来的,是解三角形的工具;任意角三角函数是研究现实中的周期现象而发展起来的,核心是周期性。它们研究的对象不同,具有的性质也不同。
2、锐角三角函数载体是直角三角形;任意角三角函数研究的载体是单位圆,突出了圆的几何性质,它是三角形的代数化。只有角的范围在(0, )内,二者间有明显联系。
π
2
例1,利用三角函数的定义求 的正弦值、余弦值和正切值
学以致用
归纳:利用单位圆求任意角三角函数值的一般步骤
①把角放在平面直角坐标系中
②画出直角三角形
③求出角的终边与单位圆的交点坐标
④利用定义来确定三角函数的值
例2、如图,∠α是一个任意角,它的终边上任意一点P(不与原点O重合)的坐标为(x,y),点P与原点的距离为r;
求证:
证明
设∠α的终边与单位圆交于点P0(x0,y0),分别过点P,P0作x轴的垂线PM,P0M0,垂足分别为M,M0,则:
由此可知,只要知道∠α终边上任意一点P的坐标,就可以求得∠α的三个三角函数值。
α
终边上任一点三角函数定义:
归纳
解:
由题意可得
P180页题3:已知∠α的终边过点P(-12,5),求∠α的三角函数值.
学以致用
跟踪训练1
√
√
x=-1.
如图,以圆心O为原点, 以射线OA为x轴的非负半轴,建立直角坐标系,则A(r,0),P(x,y). 射线OA从x轴非负半轴开始,绕点O按逆时针方向旋转角α,终止位置为OP.圆O上的点P以A为起点做逆时针方向旋转,可以建立一个三角函数模型,刻画点P的位置变化情况.
探究三 从函数角度如何刻画动点P的位置变化情况
在弧度制下,我们已经把角的范围扩展到全体实数. 不失一般性,研究任意圆上动点P的运动.
即:
2.导图梳理:
归纳、总结
1.任意角的三角函数定义的关键是什么?如何开展研究?体现了哪些思想方法?
α 0 π
sinα
cosα
tanα
π
2
3π
2
π
6
π
4
π
3
2π
3
3π
4
5π
6
牢记常见的三角函数值,解决问题事半功倍!
常见角的三角函数值
无
无
π
2
学习了三角函数定义,接下来研究他们的一些性质。
R
R
角α的正弦函数值的符号取决于它的终边上任意一点的纵坐标的符号;角α的余弦函数值的符号取决于它的终边上任意一点的横坐标的符号;角α的正弦函数值的符号取决于它的终边上任意一点横纵坐标的是否同号。
既然我们是在直角坐标系内给三角函数下了定义,我们知道,点的坐标在每个象限内正负会发生变化,请思考,那么在每个象限内三角函数符号有什么变化?
三角函数值的符号规律
+
+
+
+
+
-
-
-
-
-
-
也可以用定义记忆
一全正,二正弦,三正切,四余弦
证明:必要性:显然。
充分性:因为成立,所以角的终边可能在第三或第四象限,也可能与y轴的负半轴重合;
又因为成立,所以角的终边可能在第一或第三象限;
因此角的终边只能在第三象限,于是角为第三象限角。
例4、确定下列三角函数值的符号:
(1)
(2);
(3);
(4).
负
负
正
0
判断三角函数值符号的两个步骤
(1)定象限:确定角α所在的象限.
(2)定符号:利用三角函数值的符号规律,即“一全正,二正弦,三正切,四余弦”来判断.
反思感悟
例2
A.第一象限角 B.第二象限角
C.第三象限角 D.第四象限角
√
(2)(多选)下列选项中,符号为负的是
A.sin(-100°) B.cos(-220°)
C.tan 10 D.cos π
√
√
√
由三角函数的定义,可以知道:
终边相同的角的同一三角函数的值相等。
其中。
公
式
一
即角的终边每绕原点旋转一周,函数值将重复出现,三角函数有“周而复始”的变化规律。
利用公式一,可将求任意角的三角函数值,转化为求0~ (或0°~360°)范围内的三角函数值.
例5、求下列三角函数值:
(1)
(2);
(3)
(1)
反思感悟
利用诱导公式一进行化简求值的步骤
(1)定形:将已知的任意角写成α+2kπ(或(k∈Z)的形式.
(2)转化:根据诱导公式一,转化为求角α的某个三角函数值.
(3)求值:若角为特殊角,可直接求出该角的三角函数值.
计算下列各式的值:
(1)sin(-1 395°)cos 1 110°+cos(-1 020°)sin 750°;
例3
原式=sin(-4×360°+45°)cos(3×360°+30°)+cos(-3×360°+60°)sin(2×360°+30°)
=sin 45°cos 30°+cos 60°sin 30°
计算下列各式的值:
(1)tan 405°-sin 450°+cos 750°;
跟踪训练3
原式=tan(360°+45°)-sin(360°+90°)+cos(2×360°+30°)
=tan 45°-sin 90°+cos 30°
课堂
小结
1.知识清单:
(1)三角函数的定义及求法.
(2)三角函数值在各象限内的符号.
(3)诱导公式一.
2.方法归纳:由特殊到一般、转化与化归、分类讨论.
3.常见误区:三角函数值的大小只与角的大小有关,与终边上的点无关;正切函数的定义域为
同课章节目录
- 第一章 集合与常用逻辑用语
- 1.1 集合的概念
- 1.2 集合间的基本关系
- 1.3 集合的基本运算
- 1.4 充分条件与必要条件
- 1.5 全称量词与存在量词
- 第二章 一元二次函数、方程和不等式
- 2.1 等式性质与不等式性质
- 2.2 基本不等式
- 2.3 二次函数与一元二次方程、不等式
- 第三章 函数概念与性质
- 3.1 函数的概念及其表示
- 3.2 函数的基本性质
- 3.3 幂函数
- 3.4 函数的应用(一)
- 第四章 指数函数与对数函数
- 4.1 指数
- 4.2 指数函数
- 4.3 对数
- 4.4 对数函数
- 4.5 函数的应用(二)
- 第五章 三角函数
- 5.1 任意角和弧度制
- 5.2 三角函数的概念
- 5.3 诱导公式
- 5.4 三角函数的图象与性质
- 5.5 三角恒等变换
- 5.6 函数 y=Asin( ωx + φ)
- 5.7 三角函数的应用