人教版八年级物理下册12.1杠杆 实验探究题专练 含答案
文档属性
| 名称 | 人教版八年级物理下册12.1杠杆 实验探究题专练 含答案 |
|
|
| 格式 | zip | ||
| 文件大小 | 421.5KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-12-25 00:00:00 | ||
图片预览
文档简介
人教版八年级物理下册12.1杠杆 实验探究题专练 含答案
杠杆的平衡条件实验是重点实验,考试次数比较多,大型考试常常出现,知识点较多,涵盖面广,本次挑选17题作为一个训练,对巩固基础有很好的作用。
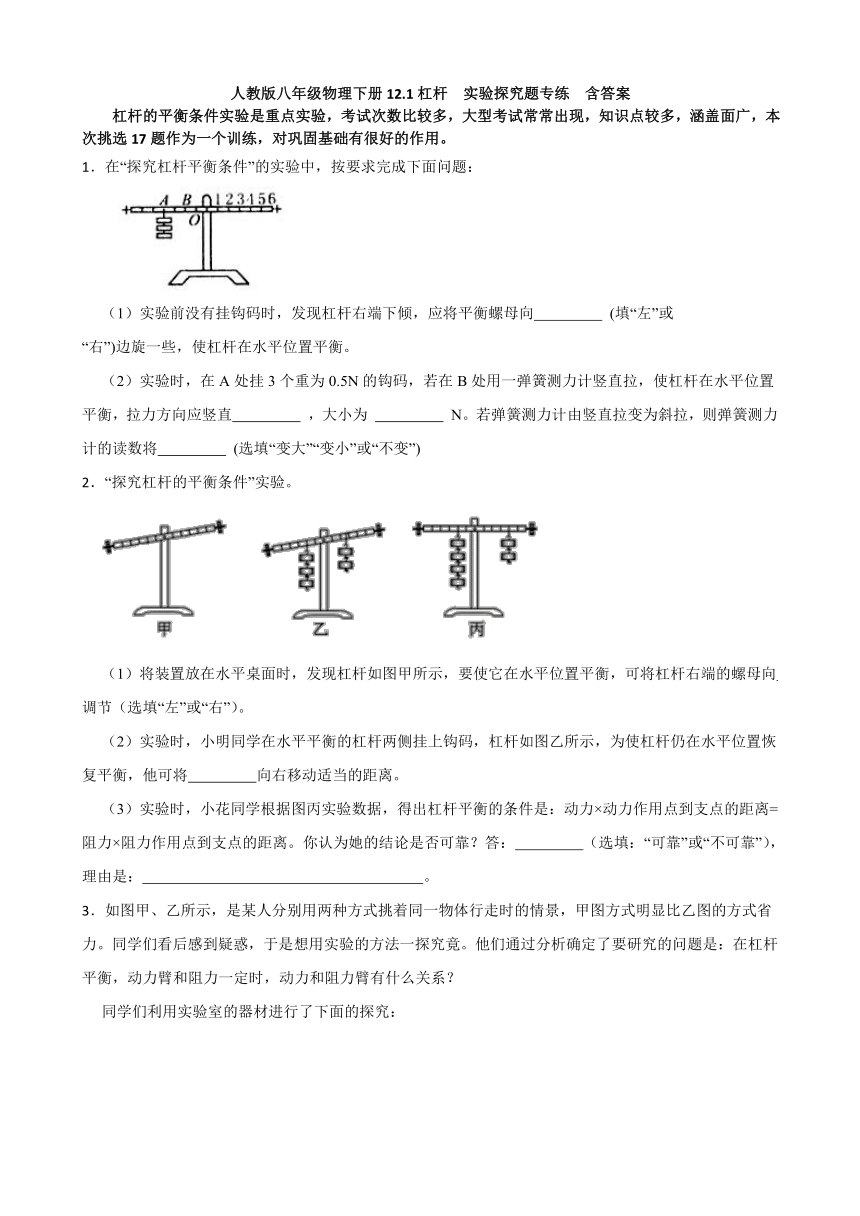
1.在“探究杠杆平衡条件”的实验中,按要求完成下面问题:
(1)实验前没有挂钩码时,发现杠杆右端下倾,应将平衡螺母向 (填“左”或
“右”)边旋一些,使杠杆在水平位置平衡。
(2)实验时,在A处挂3个重为0.5N的钩码,若在B处用一弹簧测力计竖直拉,使杠杆在水平位置平衡,拉力方向应竖直 ,大小为 N。若弹簧测力计由竖直拉变为斜拉,则弹簧测力计的读数将 (选填“变大”“变小”或“不变”)
2.“探究杠杆的平衡条件”实验。
(1)将装置放在水平桌面时,发现杠杆如图甲所示,要使它在水平位置平衡,可将杠杆右端的螺母向 调节(选填“左”或“右”)。
(2)实验时,小明同学在水平平衡的杠杆两侧挂上钩码,杠杆如图乙所示,为使杠杆仍在水平位置恢复平衡,他可将 向右移动适当的距离。
(3)实验时,小花同学根据图丙实验数据,得出杠杆平衡的条件是:动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离。你认为她的结论是否可靠?答: (选填:“可靠”或“不可靠”),理由是: 。
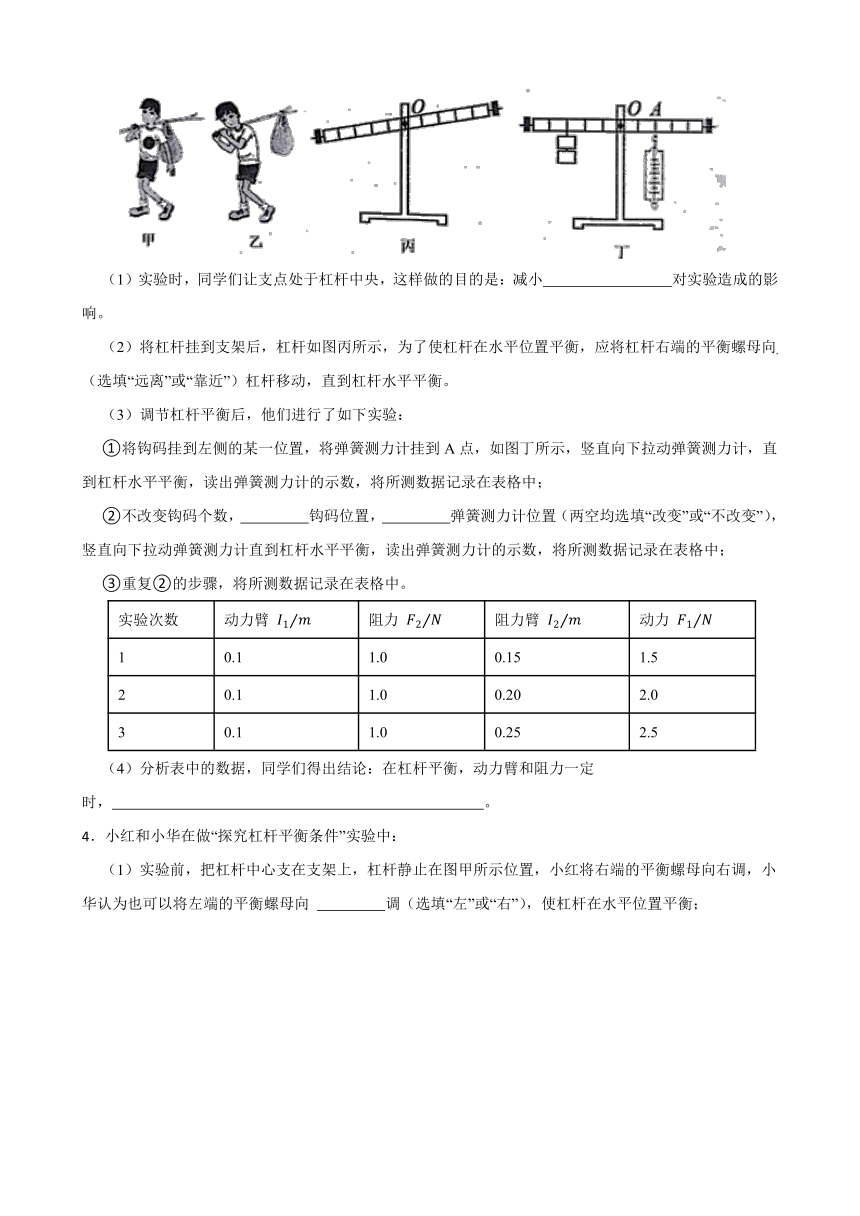
3.如图甲、乙所示,是某人分别用两种方式挑着同一物体行走时的情景,甲图方式明显比乙图的方式省力。同学们看后感到疑惑,于是想用实验的方法一探究竟。他们通过分析确定了要研究的问题是:在杠杆平衡,动力臂和阻力一定时,动力和阻力臂有什么关系?
同学们利用实验室的器材进行了下面的探究:
(1)实验时,同学们让支点处于杠杆中央,这样做的目的是:减小 对实验造成的影响。
(2)将杠杆挂到支架后,杠杆如图丙所示,为了使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向 (选填“远离”或“靠近”)杠杆移动,直到杠杆水平平衡。
(3)调节杠杆平衡后,他们进行了如下实验:
①将钩码挂到左侧的某一位置,将弹簧测力计挂到A点,如图丁所示,竖直向下拉动弹簧测力计,直到杠杆水平平衡,读出弹簧测力计的示数,将所测数据记录在表格中;
②不改变钩码个数, 钩码位置, 弹簧测力计位置(两空均选填“改变”或“不改变”),竖直向下拉动弹簧测力计直到杠杆水平平衡,读出弹簧测力计的示数,将所测数据记录在表格中;
③重复②的步骤,将所测数据记录在表格中。
实验次数 动力臂 阻力 阻力臂 动力
1 0.1 1.0 0.15 1.5
2 0.1 1.0 0.20 2.0
3 0.1 1.0 0.25 2.5
(4)分析表中的数据,同学们得出结论:在杠杆平衡,动力臂和阻力一定时, 。
4.小红和小华在做“探究杠杆平衡条件”实验中:
(1)实验前,把杠杆中心支在支架上,杠杆静止在图甲所示位置,小红将右端的平衡螺母向右调,小华认为也可以将左端的平衡螺母向 调(选填“左”或“右”),使杠杆在水平位置平衡;
(2)实验中,他多次在杠杆两端加挂钩码,并调节钩码位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 ;
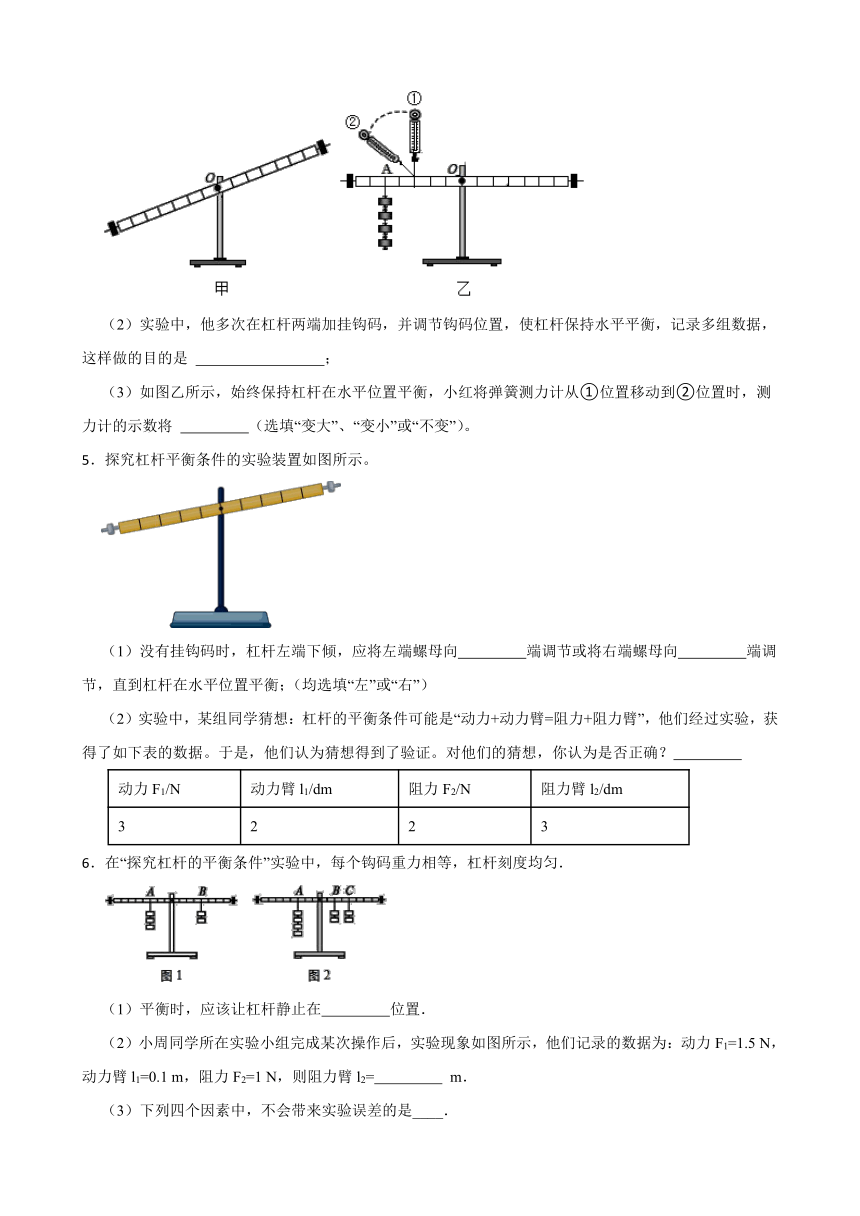
(3)如图乙所示,始终保持杠杆在水平位置平衡,小红将弹簧测力计从①位置移动到②位置时,测力计的示数将
(选填“变大”、“变小”或“不变”)。
5.探究杠杆平衡条件的实验装置如图所示。
(1)没有挂钩码时,杠杆左端下倾,应将左端螺母向 端调节或将右端螺母向 端调节,直到杠杆在水平位置平衡;(均选填“左”或“右”)
(2)实验中,某组同学猜想:杠杆的平衡条件可能是“动力+动力臂=阻力+阻力臂”,他们经过实验,获得了如下表的数据。于是,他们认为猜想得到了验证。对他们的猜想,你认为是否正确?
动力F1/N 动力臂l1/dm 阻力F2/N 阻力臂l2/dm
3 2 2 3
6.在“探究杠杆的平衡条件”实验中,每个钩码重力相等,杠杆刻度均匀.
(1)平衡时,应该让杠杆静止在 位置.
(2)小周同学所在实验小组完成某次操作后,实验现象如图所示,他们记录的数据为:动力F1=1.5 N,动力臂l1=0.1 m,阻力F2=1 N,则阻力臂l2= m.
(3)下列四个因素中,不会带来实验误差的是____.
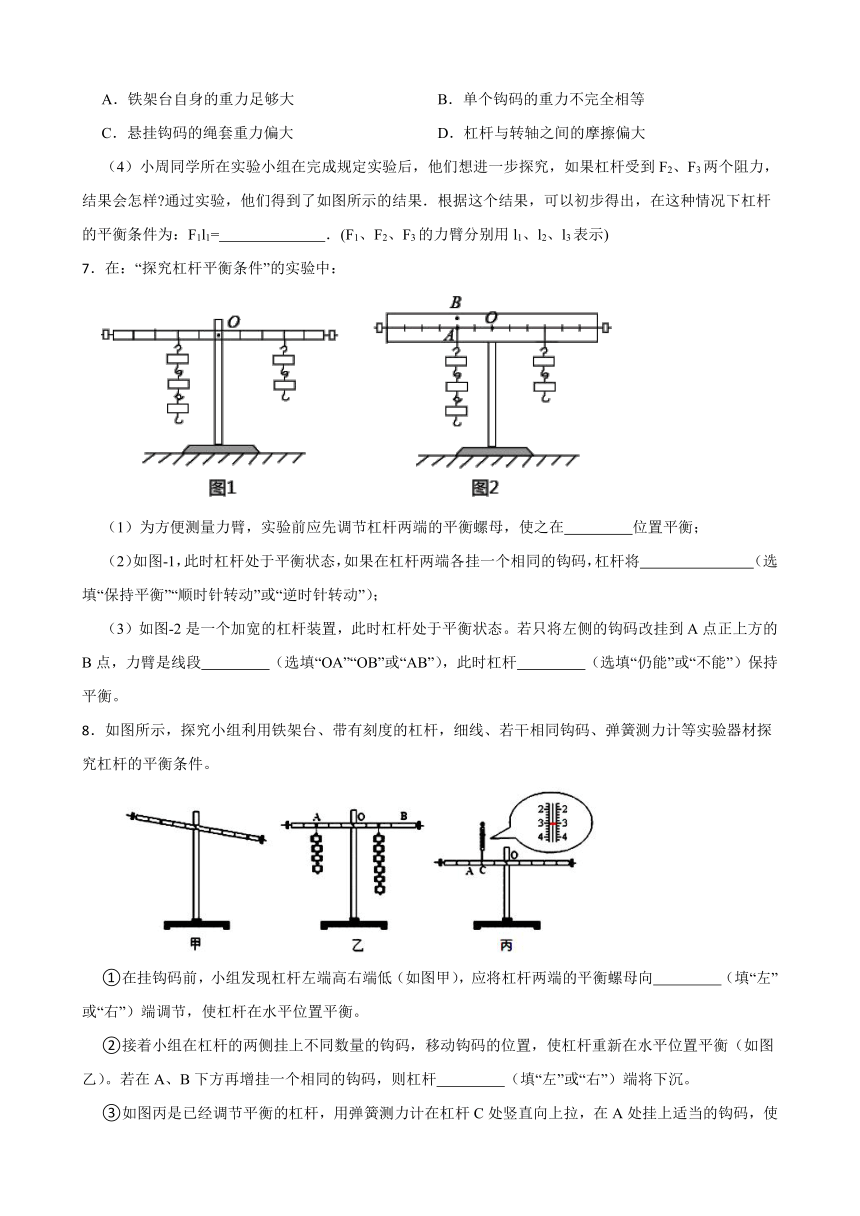
A.铁架台自身的重力足够大 B.单个钩码的重力不完全相等
C.悬挂钩码的绳套重力偏大 D.杠杆与转轴之间的摩擦偏大
(4)小周同学所在实验小组在完成规定实验后,他们想进一步探究,如果杠杆受到F2、F3两个阻力,结果会怎样 通过实验,他们得到了如图所示的结果.根据这个结果,可以初步得出,在这种情况下杠杆的平衡条件为:F1l1= .(F1、F2、F3的力臂分别用l1、l2、l3表示)
7.在:“探究杠杆平衡条件”的实验中:
(1)为方便测量力臂,实验前应先调节杠杆两端的平衡螺母,使之在 位置平衡;
(2)如图-1,此时杠杆处于平衡状态,如果在杠杆两端各挂一个相同的钩码,杠杆将 (选填“保持平衡”“顺时针转动”或“逆时针转动”);
(3)如图-2是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到A点正上方的B点,力臂是线段 (选填“OA”“OB”或“AB”),此时杠杆 (选填“仍能”或“不能”)保持平衡。
8.如图所示,探究小组利用铁架台、带有刻度的杠杆,细线、若干相同钩码、弹簧测力计等实验器材探究杠杆的平衡条件。
①在挂钩码前,小组发现杠杆左端高右端低(如图甲),应将杠杆两端的平衡螺母向 (填“左”或“右”)端调节,使杠杆在水平位置平衡。
②接着小组在杠杆的两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡(如图乙)。若在A、B下方再增挂一个相同的钩码,则杠杆 (填“左”或“右”)端将下沉。
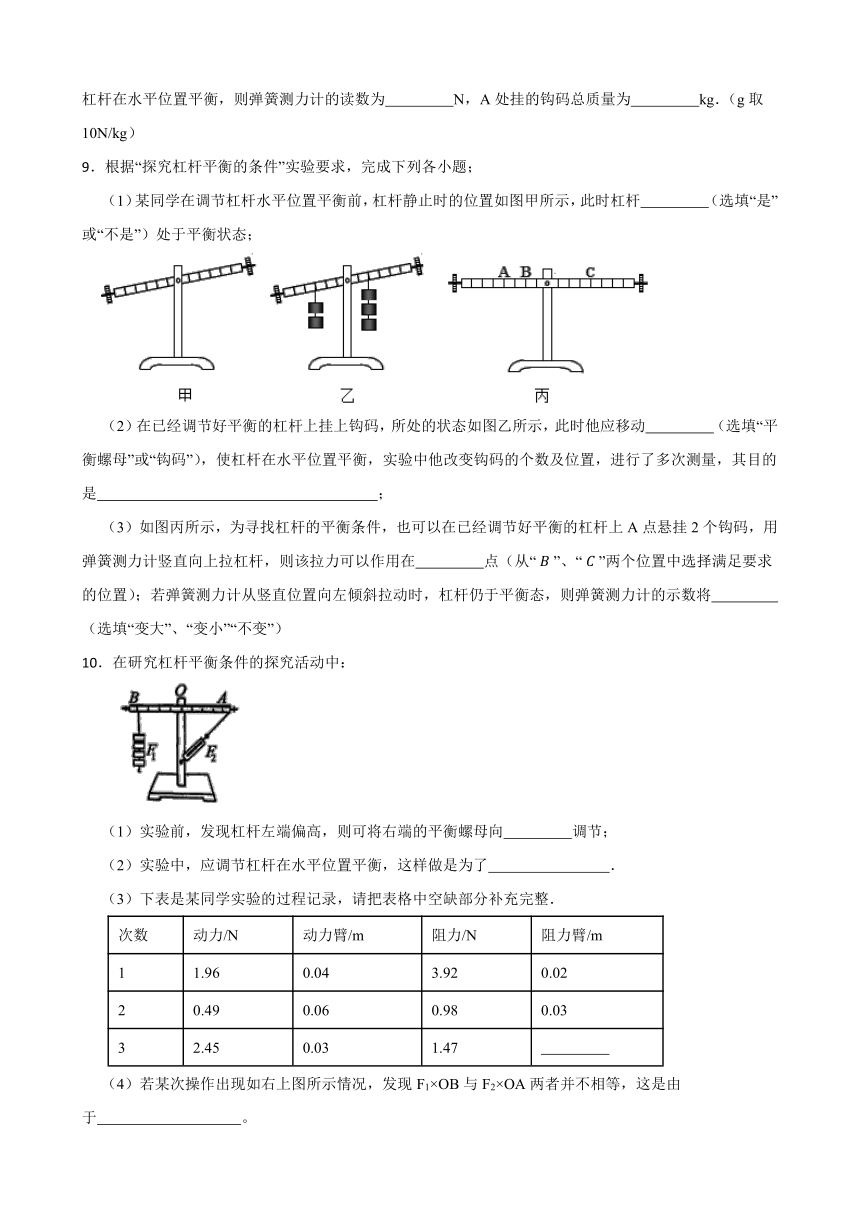
③如图丙是已经调节平衡的杠杆,用弹簧测力计在杠杆C处竖直向上拉,在A处挂上适当的钩码,使杠杆在水平位置平衡,则弹簧测力计的读数为 N,A处挂的钩码总质量为 kg.(g取10N/kg)
9.根据“探究杠杆平衡的条件”实验要求,完成下列各小题;
(1)某同学在调节杠杆水平位置平衡前,杠杆静止时的位置如图甲所示,此时杠杆 (选填“是”或“不是”)处于平衡状态;
(2)在已经调节好平衡的杠杆上挂上钩码,所处的状态如图乙所示,此时他应移动 (选填“平衡螺母”或“钩码”),使杠杆在水平位置平衡,实验中他改变钩码的个数及位置,进行了多次测量,其目的是 ;
(3)如图丙所示,为寻找杠杆的平衡条件,也可以在已经调节好平衡的杠杆上A点悬挂2个钩码,用弹簧测力计竖直向上拉杠杆,则该拉力可以作用在 点(从“ ”、“ ”两个位置中选择满足要求的位置);若弹簧测力计从竖直位置向左倾斜拉动时,杠杆仍于平衡态,则弹簧测力计的示数将 (选填“变大”、“变小”“不变”)
10.在研究杠杆平衡条件的探究活动中:
(1)实验前,发现杠杆左端偏高,则可将右端的平衡螺母向 调节;
(2)实验中,应调节杠杆在水平位置平衡,这样做是为了 .
(3)下表是某同学实验的过程记录,请把表格中空缺部分补充完整.
次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1 1.96 0.04 3.92 0.02
2 0.49 0.06 0.98 0.03
3 2.45 0.03 1.47
(4)若某次操作出现如右上图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于 。
(5)某次实验中,用如图乙所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是以下哪种原因________(选填字母)。
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(6)如图丙所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力——位移传感器”竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图丁所示。由图可知金属杆重 N。
11.小明用杠杆、一盒钩码和弹簧测力计等器材,做“探究杠杆平衡条件”的实验。
(1)实验开始时,杠杆的位置如图甲所示。为使杠杆在水平位置平衡,应将右端的平衡螺母向 (选填“左”或“右”)移动;
(2)小明调节杠杆水平平衡后,在杠杆左侧挂2个钩码,如图乙所示。要使杠杆水平平衡,应在A处挂 个钩码;
(3)当小明改用弹簧测力计在B位置竖直向上提杠杆,使其水平平衡,发现弹簧测力计的示数等于乙图A点所挂钩码的重力。若此时他将测力计偏离竖直方向向上提,仍使杠杆在水平位置静止,如图丙所示,则弹簧测力计的示数一定会 (选填“变大”“不变”或“变小”)。
12.如图所示,小明在家里用筷子、细线、几块相同的橡皮擦和钢卷尺等物品“探究杠杆的平衡条件”。
(1)小明将细线系在筷子的中部位置,筷子静止后如图1所示,此时筷子处于 (选填“平衡”或“非平衡”)状态;接下来他应该将细线向 (选填“左”或“右”)移动适当距离,让筷子在水平位置平衡,这样做除了可以消除筷子所受的重力对实验的影响外,还具有便于 的优点。
(2)调节筷子在水平位置平衡,小明把数量不等的橡皮擦分别挂在筷子两侧,然后用钢卷尺测出橡皮擦悬挂点距支点的距离,如图2所示,实验数据记录在如表中。在第三次实验中n2= 时筷子才能在水平位置平衡;在第二次实验中,将两侧的橡皮擦向远离支点的方向移动1cm,则筷子将
(选填“左侧下沉”、“右侧下沉”或“仍然水平平衡”)。
实验 左侧橡皮擦个数n1/个 左侧橡皮擦悬挂点距支点距离s1/cm 右侧橡皮擦个数n2/个 右侧橡皮擦悬挂点距支点距离s2/cm
1 3 3.0 1 9.0
2 3 5.0 2 7.5
3 4 3.5
7.0
(3)小明利用橡皮擦和筷子制作了一把“杆秤”,如图3所示,他想增加“杆秤”的量程,应将悬挂“杆秤”的细线向 (选填“左”或“右”)移动一定的距离;小明将作为“秤砣”的橡皮擦取下擦了一些字以后,再用此“秤砣”称量物品的质量,则测量结果 (选填“大于”“小于”或“等于”)物品的真实质量。
13.在探究“杠杆的平衡条件”实验中,某小组做了如图所示实验。
(1)实验开始时,杠杆的位置如图甲所示。此时应将杠杆右端的平衡螺母向 (选填“左”或“右”)移动,使杠杆在水平位置平衡。
(2)要使图乙中杠杆平衡,应在a处挂 个钩码(每个钩码的质量相同)才能使杠杆在水平位置平衡。在此实验的基础上,在杠杆两端钩码处再各增加一个钩码,杠杆 (选填“能”或“不能”)再次平衡。
(3)当弹簧测力计由图丙中的竖直拉变成倾斜拉时,要使杠杆仍然在水平位置平衡,弹簧测力计的示数将 (选填“变大”“不变”或“变小”),其原因是 。
(4)有同学测出一组数据后就得出了“动力×动力臂=阻力×阻力臂”的结论,乙同学认为他的做法不合理,理由是 。
14.如图所示,这是“探究杠杆的平衡条件”的装置,每个钩码重为0.5N(钩码个数若干)。
(1)将该装置置于水平桌面上,静止时处于如图甲所示的状态。应将平衡螺母向 (选填“左”或“右”)移,使杠杆在水平位置平衡。
(2)图乙中杠杆恰好水平平衡,若在A、B两点下方各再挂一个相同的钩码,杠杆将 (选填“左端下沉”、“右端下沉”或“保持水平平衡”)。
(3)图丙中杠杆每个小格长度均为5cm,在C点竖直悬挂4个钩码,在D点用如图丙所示拉力F拉杠杆。要使杠杆在水平位置平衡,此时拉力F应为 N。
15.小明在“探究杠杆平衡条件”的实验中。
(1)实验前,将杠杆中点置于支架上,杠杆处于如图甲所示的静止状态,他应把杠杆左端的平衡螺母向 (选填“左”或“右”)侧调节,使杠杆在水平位置平衡。
(2)如图乙所示杠杆在水平位置平衡,若将A、B两点下方挂的钩码同时朝远离支点O方向移动一小格,则杠杆 。(选填“仍保持平衡”“左端下沉”或“右端下沉”)
(3)取下A点下方所挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,才能使杠杆在水平位置平衡,此时弹簧测力计的示数为F1,如果将弹簧测力计沿如图丙所示方向拉杠杆,使杠杆仍处于水平位置平衡,此时弹簧测力计的示数为F2,则F2 F1。(选填“>”“=”或“<”)
16.小明在探究“杠杆平衡条件”的实验中:
(1)小明实验前发现杠杆右端低,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节(选填“左”或“右”);
(2)如图甲所示,在杠杆左边A处挂3个相同的钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样的钩码 个;
(3)如图乙所示,用弹簧测力计竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”),其原因是 ;
(4)做实验时,当杠杆由图乙的位置变成图丙的位置时,弹簧测力计的数将 (选填“变大”、“变小”或“不变”)。设杠杆质地均匀,支点恰好在杠杆的中心,并且不计支点处的摩擦;
(5)探究了杠杆的平衡条件后,小明对天平上游码的质量进行了计算,他用刻度尺测出L1和L2(如图丁所示),则游码的质量为 g(利用测出的物理量表达)。
17.小高在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,此时杠杆 (选填
“平衡”、“不平衡”),为使杠杆水平平衡,他应将左端的平衡螺母向 (左/右)调节。
(2)图乙中,他用弹簧测力计在B处竖直向上拉杠杆到水平位置平衡,将杠杆调至水平平衡的目的是便于 ;此时测力计的示数为 N。如他将测力计沿图中虚线方向拉,仍使杠杆在水平位置平衡,测力计的示数将 (变大/不变/变小);
(3)此实验多次改变钩码的数量和悬挂位置以及弹簧测力计的位置,收集杠杆平衡时多组动力、动力臂、阻力和阻力臂的数据,其目的是 。
(4)完成上述实验后,小高利用杠杆平衡条件来测量杠杆自身的质量:
①如图丙将杠杆的C点挂在支架上,在C点的右侧挂质量为m的钩码,左右移动钩码的位置,使杠杆在水平位置平衡;
②用刻度尺测出此时钩码悬挂位置D点到C点的距离l1和 点到C点的距离l2;
③根据杠杆平衡条件,可以计算出杠杆的质量m杠杆= (用题目中所给物理量符号表示)。
答案
1.(1)左 (2)向上;3;变大
2.(1)右 (2)钩码 (3)不可靠;仅凭一次实验得出结论,具有偶然性
3.(1)杠杆自身重力 (2)远离 (3)改变;不改变
(4)动力与阻力臂成正比(或阻力臂越大,动力越大)
4.(1)右 (2)寻找普遍规律 (3)变大
5.(1)右;右 (2)不正确
6.(1)水平 (2)0.15 (3)A (4)F3l3+F2l2
7.(1)水平 (2)顺时针转动 (3)OA;仍能
8.左;左;3;0.2
9.(1)是 (2)钩码;使实验结论更具普遍性,避免偶然性 (3)B;变大
10.(1)左端 (2)避免杠杆重力对杠杆平衡产生的影响和便于测量力臂 (3)0.05 (4)OA不是F2的力臂 (5)D (6)10N
11.(1)右 (2)1 (3)变大
12.(1)平衡;左;测量力臂 (2)2;左侧下沉 (3)左;大于
13.(1)右 (2)1;不能 (3)变大;拉力的力臂变小了
(4)一组实验数据太少,具有偶然性,不便找出普遍规律
14.(1)左 (2)右端下沉 (3)2
15.(1)右 (2)左端下沉 (3)>
16.(1)左 (2)4 (3)变大;拉力的力臂变小了 (4)不变 (5)
17.(1)平衡;右 (2)测量力臂;1.5;变大 (3)寻找普遍规律 (4)O;
杠杆的平衡条件实验是重点实验,考试次数比较多,大型考试常常出现,知识点较多,涵盖面广,本次挑选17题作为一个训练,对巩固基础有很好的作用。
1.在“探究杠杆平衡条件”的实验中,按要求完成下面问题:
(1)实验前没有挂钩码时,发现杠杆右端下倾,应将平衡螺母向 (填“左”或
“右”)边旋一些,使杠杆在水平位置平衡。
(2)实验时,在A处挂3个重为0.5N的钩码,若在B处用一弹簧测力计竖直拉,使杠杆在水平位置平衡,拉力方向应竖直 ,大小为 N。若弹簧测力计由竖直拉变为斜拉,则弹簧测力计的读数将 (选填“变大”“变小”或“不变”)
2.“探究杠杆的平衡条件”实验。
(1)将装置放在水平桌面时,发现杠杆如图甲所示,要使它在水平位置平衡,可将杠杆右端的螺母向 调节(选填“左”或“右”)。
(2)实验时,小明同学在水平平衡的杠杆两侧挂上钩码,杠杆如图乙所示,为使杠杆仍在水平位置恢复平衡,他可将 向右移动适当的距离。
(3)实验时,小花同学根据图丙实验数据,得出杠杆平衡的条件是:动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离。你认为她的结论是否可靠?答: (选填:“可靠”或“不可靠”),理由是: 。
3.如图甲、乙所示,是某人分别用两种方式挑着同一物体行走时的情景,甲图方式明显比乙图的方式省力。同学们看后感到疑惑,于是想用实验的方法一探究竟。他们通过分析确定了要研究的问题是:在杠杆平衡,动力臂和阻力一定时,动力和阻力臂有什么关系?
同学们利用实验室的器材进行了下面的探究:
(1)实验时,同学们让支点处于杠杆中央,这样做的目的是:减小 对实验造成的影响。
(2)将杠杆挂到支架后,杠杆如图丙所示,为了使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向 (选填“远离”或“靠近”)杠杆移动,直到杠杆水平平衡。
(3)调节杠杆平衡后,他们进行了如下实验:
①将钩码挂到左侧的某一位置,将弹簧测力计挂到A点,如图丁所示,竖直向下拉动弹簧测力计,直到杠杆水平平衡,读出弹簧测力计的示数,将所测数据记录在表格中;
②不改变钩码个数, 钩码位置, 弹簧测力计位置(两空均选填“改变”或“不改变”),竖直向下拉动弹簧测力计直到杠杆水平平衡,读出弹簧测力计的示数,将所测数据记录在表格中;
③重复②的步骤,将所测数据记录在表格中。
实验次数 动力臂 阻力 阻力臂 动力
1 0.1 1.0 0.15 1.5
2 0.1 1.0 0.20 2.0
3 0.1 1.0 0.25 2.5
(4)分析表中的数据,同学们得出结论:在杠杆平衡,动力臂和阻力一定时, 。
4.小红和小华在做“探究杠杆平衡条件”实验中:
(1)实验前,把杠杆中心支在支架上,杠杆静止在图甲所示位置,小红将右端的平衡螺母向右调,小华认为也可以将左端的平衡螺母向 调(选填“左”或“右”),使杠杆在水平位置平衡;
(2)实验中,他多次在杠杆两端加挂钩码,并调节钩码位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 ;
(3)如图乙所示,始终保持杠杆在水平位置平衡,小红将弹簧测力计从①位置移动到②位置时,测力计的示数将
(选填“变大”、“变小”或“不变”)。
5.探究杠杆平衡条件的实验装置如图所示。
(1)没有挂钩码时,杠杆左端下倾,应将左端螺母向 端调节或将右端螺母向 端调节,直到杠杆在水平位置平衡;(均选填“左”或“右”)
(2)实验中,某组同学猜想:杠杆的平衡条件可能是“动力+动力臂=阻力+阻力臂”,他们经过实验,获得了如下表的数据。于是,他们认为猜想得到了验证。对他们的猜想,你认为是否正确?
动力F1/N 动力臂l1/dm 阻力F2/N 阻力臂l2/dm
3 2 2 3
6.在“探究杠杆的平衡条件”实验中,每个钩码重力相等,杠杆刻度均匀.
(1)平衡时,应该让杠杆静止在 位置.
(2)小周同学所在实验小组完成某次操作后,实验现象如图所示,他们记录的数据为:动力F1=1.5 N,动力臂l1=0.1 m,阻力F2=1 N,则阻力臂l2= m.
(3)下列四个因素中,不会带来实验误差的是____.
A.铁架台自身的重力足够大 B.单个钩码的重力不完全相等
C.悬挂钩码的绳套重力偏大 D.杠杆与转轴之间的摩擦偏大
(4)小周同学所在实验小组在完成规定实验后,他们想进一步探究,如果杠杆受到F2、F3两个阻力,结果会怎样 通过实验,他们得到了如图所示的结果.根据这个结果,可以初步得出,在这种情况下杠杆的平衡条件为:F1l1= .(F1、F2、F3的力臂分别用l1、l2、l3表示)
7.在:“探究杠杆平衡条件”的实验中:
(1)为方便测量力臂,实验前应先调节杠杆两端的平衡螺母,使之在 位置平衡;
(2)如图-1,此时杠杆处于平衡状态,如果在杠杆两端各挂一个相同的钩码,杠杆将 (选填“保持平衡”“顺时针转动”或“逆时针转动”);
(3)如图-2是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到A点正上方的B点,力臂是线段 (选填“OA”“OB”或“AB”),此时杠杆 (选填“仍能”或“不能”)保持平衡。
8.如图所示,探究小组利用铁架台、带有刻度的杠杆,细线、若干相同钩码、弹簧测力计等实验器材探究杠杆的平衡条件。
①在挂钩码前,小组发现杠杆左端高右端低(如图甲),应将杠杆两端的平衡螺母向 (填“左”或“右”)端调节,使杠杆在水平位置平衡。
②接着小组在杠杆的两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡(如图乙)。若在A、B下方再增挂一个相同的钩码,则杠杆 (填“左”或“右”)端将下沉。
③如图丙是已经调节平衡的杠杆,用弹簧测力计在杠杆C处竖直向上拉,在A处挂上适当的钩码,使杠杆在水平位置平衡,则弹簧测力计的读数为 N,A处挂的钩码总质量为 kg.(g取10N/kg)
9.根据“探究杠杆平衡的条件”实验要求,完成下列各小题;
(1)某同学在调节杠杆水平位置平衡前,杠杆静止时的位置如图甲所示,此时杠杆 (选填“是”或“不是”)处于平衡状态;
(2)在已经调节好平衡的杠杆上挂上钩码,所处的状态如图乙所示,此时他应移动 (选填“平衡螺母”或“钩码”),使杠杆在水平位置平衡,实验中他改变钩码的个数及位置,进行了多次测量,其目的是 ;
(3)如图丙所示,为寻找杠杆的平衡条件,也可以在已经调节好平衡的杠杆上A点悬挂2个钩码,用弹簧测力计竖直向上拉杠杆,则该拉力可以作用在 点(从“ ”、“ ”两个位置中选择满足要求的位置);若弹簧测力计从竖直位置向左倾斜拉动时,杠杆仍于平衡态,则弹簧测力计的示数将 (选填“变大”、“变小”“不变”)
10.在研究杠杆平衡条件的探究活动中:
(1)实验前,发现杠杆左端偏高,则可将右端的平衡螺母向 调节;
(2)实验中,应调节杠杆在水平位置平衡,这样做是为了 .
(3)下表是某同学实验的过程记录,请把表格中空缺部分补充完整.
次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1 1.96 0.04 3.92 0.02
2 0.49 0.06 0.98 0.03
3 2.45 0.03 1.47
(4)若某次操作出现如右上图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于 。
(5)某次实验中,用如图乙所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是以下哪种原因________(选填字母)。
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(6)如图丙所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力——位移传感器”竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图丁所示。由图可知金属杆重 N。
11.小明用杠杆、一盒钩码和弹簧测力计等器材,做“探究杠杆平衡条件”的实验。
(1)实验开始时,杠杆的位置如图甲所示。为使杠杆在水平位置平衡,应将右端的平衡螺母向 (选填“左”或“右”)移动;
(2)小明调节杠杆水平平衡后,在杠杆左侧挂2个钩码,如图乙所示。要使杠杆水平平衡,应在A处挂 个钩码;
(3)当小明改用弹簧测力计在B位置竖直向上提杠杆,使其水平平衡,发现弹簧测力计的示数等于乙图A点所挂钩码的重力。若此时他将测力计偏离竖直方向向上提,仍使杠杆在水平位置静止,如图丙所示,则弹簧测力计的示数一定会 (选填“变大”“不变”或“变小”)。
12.如图所示,小明在家里用筷子、细线、几块相同的橡皮擦和钢卷尺等物品“探究杠杆的平衡条件”。
(1)小明将细线系在筷子的中部位置,筷子静止后如图1所示,此时筷子处于 (选填“平衡”或“非平衡”)状态;接下来他应该将细线向 (选填“左”或“右”)移动适当距离,让筷子在水平位置平衡,这样做除了可以消除筷子所受的重力对实验的影响外,还具有便于 的优点。
(2)调节筷子在水平位置平衡,小明把数量不等的橡皮擦分别挂在筷子两侧,然后用钢卷尺测出橡皮擦悬挂点距支点的距离,如图2所示,实验数据记录在如表中。在第三次实验中n2= 时筷子才能在水平位置平衡;在第二次实验中,将两侧的橡皮擦向远离支点的方向移动1cm,则筷子将
(选填“左侧下沉”、“右侧下沉”或“仍然水平平衡”)。
实验 左侧橡皮擦个数n1/个 左侧橡皮擦悬挂点距支点距离s1/cm 右侧橡皮擦个数n2/个 右侧橡皮擦悬挂点距支点距离s2/cm
1 3 3.0 1 9.0
2 3 5.0 2 7.5
3 4 3.5
7.0
(3)小明利用橡皮擦和筷子制作了一把“杆秤”,如图3所示,他想增加“杆秤”的量程,应将悬挂“杆秤”的细线向 (选填“左”或“右”)移动一定的距离;小明将作为“秤砣”的橡皮擦取下擦了一些字以后,再用此“秤砣”称量物品的质量,则测量结果 (选填“大于”“小于”或“等于”)物品的真实质量。
13.在探究“杠杆的平衡条件”实验中,某小组做了如图所示实验。
(1)实验开始时,杠杆的位置如图甲所示。此时应将杠杆右端的平衡螺母向 (选填“左”或“右”)移动,使杠杆在水平位置平衡。
(2)要使图乙中杠杆平衡,应在a处挂 个钩码(每个钩码的质量相同)才能使杠杆在水平位置平衡。在此实验的基础上,在杠杆两端钩码处再各增加一个钩码,杠杆 (选填“能”或“不能”)再次平衡。
(3)当弹簧测力计由图丙中的竖直拉变成倾斜拉时,要使杠杆仍然在水平位置平衡,弹簧测力计的示数将 (选填“变大”“不变”或“变小”),其原因是 。
(4)有同学测出一组数据后就得出了“动力×动力臂=阻力×阻力臂”的结论,乙同学认为他的做法不合理,理由是 。
14.如图所示,这是“探究杠杆的平衡条件”的装置,每个钩码重为0.5N(钩码个数若干)。
(1)将该装置置于水平桌面上,静止时处于如图甲所示的状态。应将平衡螺母向 (选填“左”或“右”)移,使杠杆在水平位置平衡。
(2)图乙中杠杆恰好水平平衡,若在A、B两点下方各再挂一个相同的钩码,杠杆将 (选填“左端下沉”、“右端下沉”或“保持水平平衡”)。
(3)图丙中杠杆每个小格长度均为5cm,在C点竖直悬挂4个钩码,在D点用如图丙所示拉力F拉杠杆。要使杠杆在水平位置平衡,此时拉力F应为 N。
15.小明在“探究杠杆平衡条件”的实验中。
(1)实验前,将杠杆中点置于支架上,杠杆处于如图甲所示的静止状态,他应把杠杆左端的平衡螺母向 (选填“左”或“右”)侧调节,使杠杆在水平位置平衡。
(2)如图乙所示杠杆在水平位置平衡,若将A、B两点下方挂的钩码同时朝远离支点O方向移动一小格,则杠杆 。(选填“仍保持平衡”“左端下沉”或“右端下沉”)
(3)取下A点下方所挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,才能使杠杆在水平位置平衡,此时弹簧测力计的示数为F1,如果将弹簧测力计沿如图丙所示方向拉杠杆,使杠杆仍处于水平位置平衡,此时弹簧测力计的示数为F2,则F2 F1。(选填“>”“=”或“<”)
16.小明在探究“杠杆平衡条件”的实验中:
(1)小明实验前发现杠杆右端低,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节(选填“左”或“右”);
(2)如图甲所示,在杠杆左边A处挂3个相同的钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样的钩码 个;
(3)如图乙所示,用弹簧测力计竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”),其原因是 ;
(4)做实验时,当杠杆由图乙的位置变成图丙的位置时,弹簧测力计的数将 (选填“变大”、“变小”或“不变”)。设杠杆质地均匀,支点恰好在杠杆的中心,并且不计支点处的摩擦;
(5)探究了杠杆的平衡条件后,小明对天平上游码的质量进行了计算,他用刻度尺测出L1和L2(如图丁所示),则游码的质量为 g(利用测出的物理量表达)。
17.小高在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,此时杠杆 (选填
“平衡”、“不平衡”),为使杠杆水平平衡,他应将左端的平衡螺母向 (左/右)调节。
(2)图乙中,他用弹簧测力计在B处竖直向上拉杠杆到水平位置平衡,将杠杆调至水平平衡的目的是便于 ;此时测力计的示数为 N。如他将测力计沿图中虚线方向拉,仍使杠杆在水平位置平衡,测力计的示数将 (变大/不变/变小);
(3)此实验多次改变钩码的数量和悬挂位置以及弹簧测力计的位置,收集杠杆平衡时多组动力、动力臂、阻力和阻力臂的数据,其目的是 。
(4)完成上述实验后,小高利用杠杆平衡条件来测量杠杆自身的质量:
①如图丙将杠杆的C点挂在支架上,在C点的右侧挂质量为m的钩码,左右移动钩码的位置,使杠杆在水平位置平衡;
②用刻度尺测出此时钩码悬挂位置D点到C点的距离l1和 点到C点的距离l2;
③根据杠杆平衡条件,可以计算出杠杆的质量m杠杆= (用题目中所给物理量符号表示)。
答案
1.(1)左 (2)向上;3;变大
2.(1)右 (2)钩码 (3)不可靠;仅凭一次实验得出结论,具有偶然性
3.(1)杠杆自身重力 (2)远离 (3)改变;不改变
(4)动力与阻力臂成正比(或阻力臂越大,动力越大)
4.(1)右 (2)寻找普遍规律 (3)变大
5.(1)右;右 (2)不正确
6.(1)水平 (2)0.15 (3)A (4)F3l3+F2l2
7.(1)水平 (2)顺时针转动 (3)OA;仍能
8.左;左;3;0.2
9.(1)是 (2)钩码;使实验结论更具普遍性,避免偶然性 (3)B;变大
10.(1)左端 (2)避免杠杆重力对杠杆平衡产生的影响和便于测量力臂 (3)0.05 (4)OA不是F2的力臂 (5)D (6)10N
11.(1)右 (2)1 (3)变大
12.(1)平衡;左;测量力臂 (2)2;左侧下沉 (3)左;大于
13.(1)右 (2)1;不能 (3)变大;拉力的力臂变小了
(4)一组实验数据太少,具有偶然性,不便找出普遍规律
14.(1)左 (2)右端下沉 (3)2
15.(1)右 (2)左端下沉 (3)>
16.(1)左 (2)4 (3)变大;拉力的力臂变小了 (4)不变 (5)
17.(1)平衡;右 (2)测量力臂;1.5;变大 (3)寻找普遍规律 (4)O;