人教版八年级物理下册12.1杠杆 实验探究题专练 含答案
文档属性
| 名称 | 人教版八年级物理下册12.1杠杆 实验探究题专练 含答案 |
|
|
| 格式 | zip | ||
| 文件大小 | 332.3KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2022-12-25 00:00:00 | ||
图片预览
文档简介
人教版八年级物理下册12.1杠杆 实验探究题专练 含答案
杠杆的平衡条件实验在一些大型考试中时时出现,分值也比较高,本套试卷选了16道题,对基础知识巩固有很好的作用,有助于对知识点的掌握。
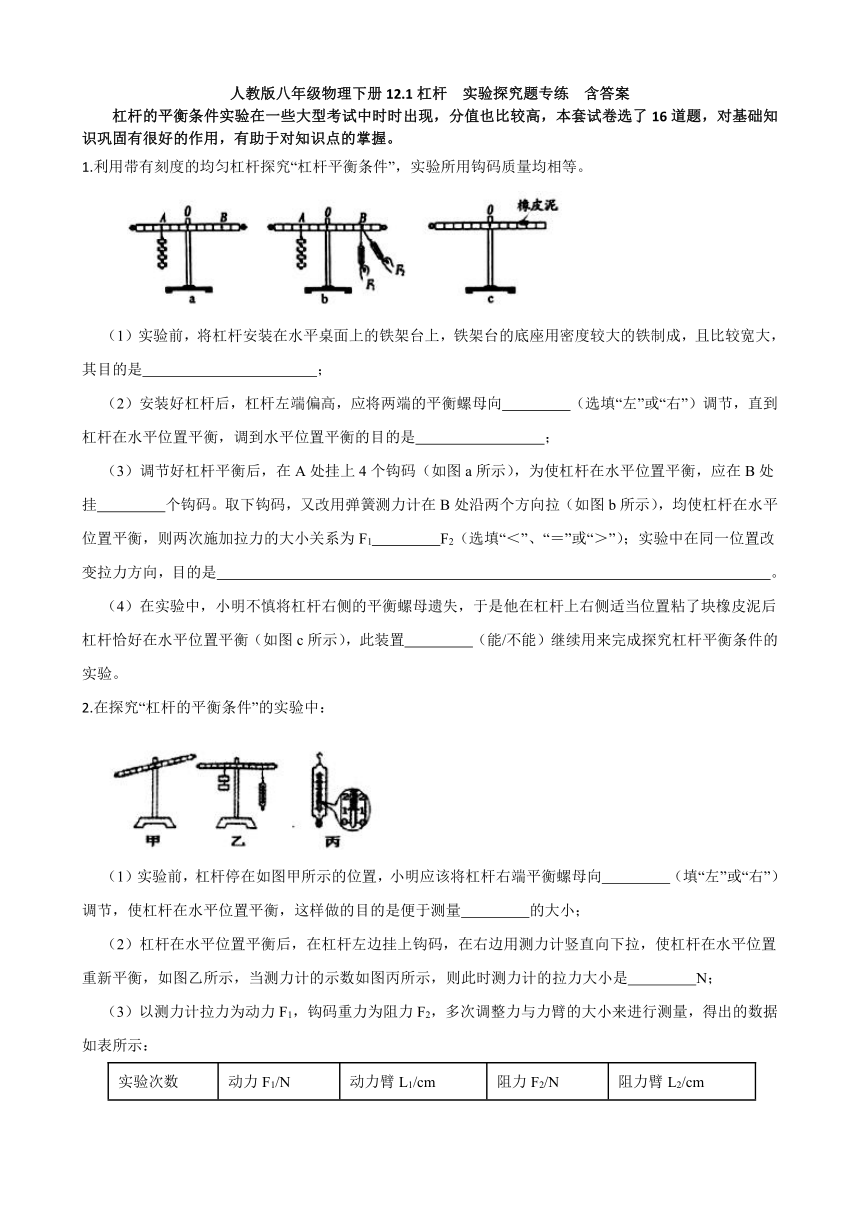
1.利用带有刻度的均匀杠杆探究“杠杆平衡条件”,实验所用钩码质量均相等。
(1)实验前,将杠杆安装在水平桌面上的铁架台上,铁架台的底座用密度较大的铁制成,且比较宽大,其目的是 ;
(2)安装好杠杆后,杠杆左端偏高,应将两端的平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡,调到水平位置平衡的目的是 ;
(3)调节好杠杆平衡后,在A处挂上4个钩码(如图a所示),为使杠杆在水平位置平衡,应在B处挂 个钩码。取下钩码,又改用弹簧测力计在B处沿两个方向拉(如图b所示),均使杠杆在水平位置平衡,则两次施加拉力的大小关系为F1 F2(选填“<”、“=”或“>”);实验中在同一位置改变拉力方向,目的是 。
(4)在实验中,小明不慎将杠杆右侧的平衡螺母遗失,于是他在杠杆上右侧适当位置粘了块橡皮泥后杠杆恰好在水平位置平衡(如图c所示),此装置 (能/不能)继续用来完成探究杠杆平衡条件的实验。
2.在探究“杠杆的平衡条件”的实验中:
(1)实验前,杠杆停在如图甲所示的位置,小明应该将杠杆右端平衡螺母向 (填“左”或“右”)调节,使杠杆在水平位置平衡,这样做的目的是便于测量 的大小;
(2)杠杆在水平位置平衡后,在杠杆左边挂上钩码,在右边用测力计竖直向下拉,使杠杆在水平位置重新平衡,如图乙所示,当测力计的示数如图丙所示,则此时测力计的拉力大小是 N;
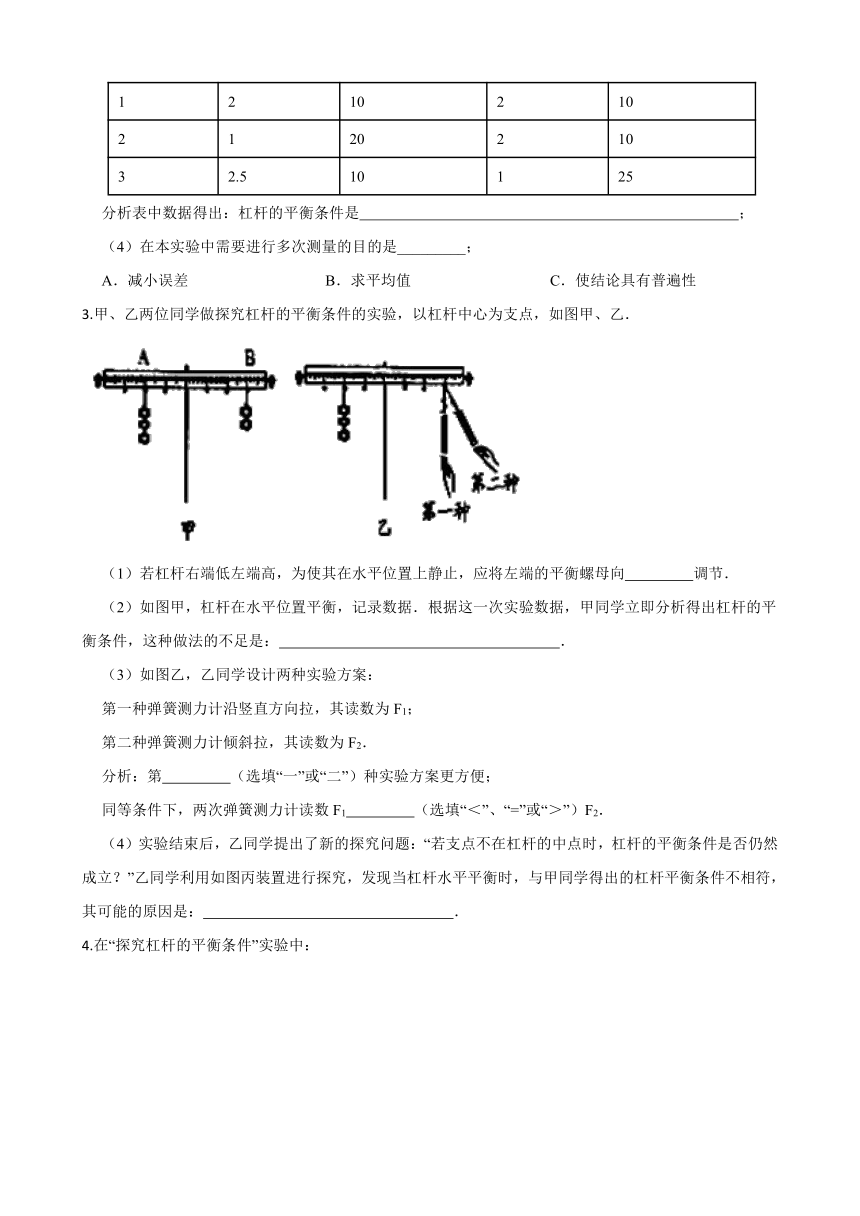
(3)以测力计拉力为动力F1,钩码重力为阻力F2,多次调整力与力臂的大小来进行测量,得出的数据如表所示:
实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 2 10 2 10
2 1 20 2 10
3 2.5 10 1 25
分析表中数据得出:杠杆的平衡条件是 ;
(4)在本实验中需要进行多次测量的目的是_________;
A.减小误差 B.求平均值 C.使结论具有普遍性
3.甲、乙两位同学做探究杠杆的平衡条件的实验,以杠杆中心为支点,如图甲、乙.
(1)若杠杆右端低左端高,为使其在水平位置上静止,应将左端的平衡螺母向 调节.
(2)如图甲,杠杆在水平位置平衡,记录数据.根据这一次实验数据,甲同学立即分析得出杠杆的平衡条件,这种做法的不足是: .
(3)如图乙,乙同学设计两种实验方案:
第一种弹簧测力计沿竖直方向拉,其读数为F1;
第二种弹簧测力计倾斜拉,其读数为F2.
分析:第 (选填“一”或“二”)种实验方案更方便;
同等条件下,两次弹簧测力计读数F1 (选填“<”、“=”或“>”)F2.
(4)实验结束后,乙同学提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”乙同学利用如图丙装置进行探究,发现当杠杆水平平衡时,与甲同学得出的杠杆平衡条件不相符,其可能的原因是: .
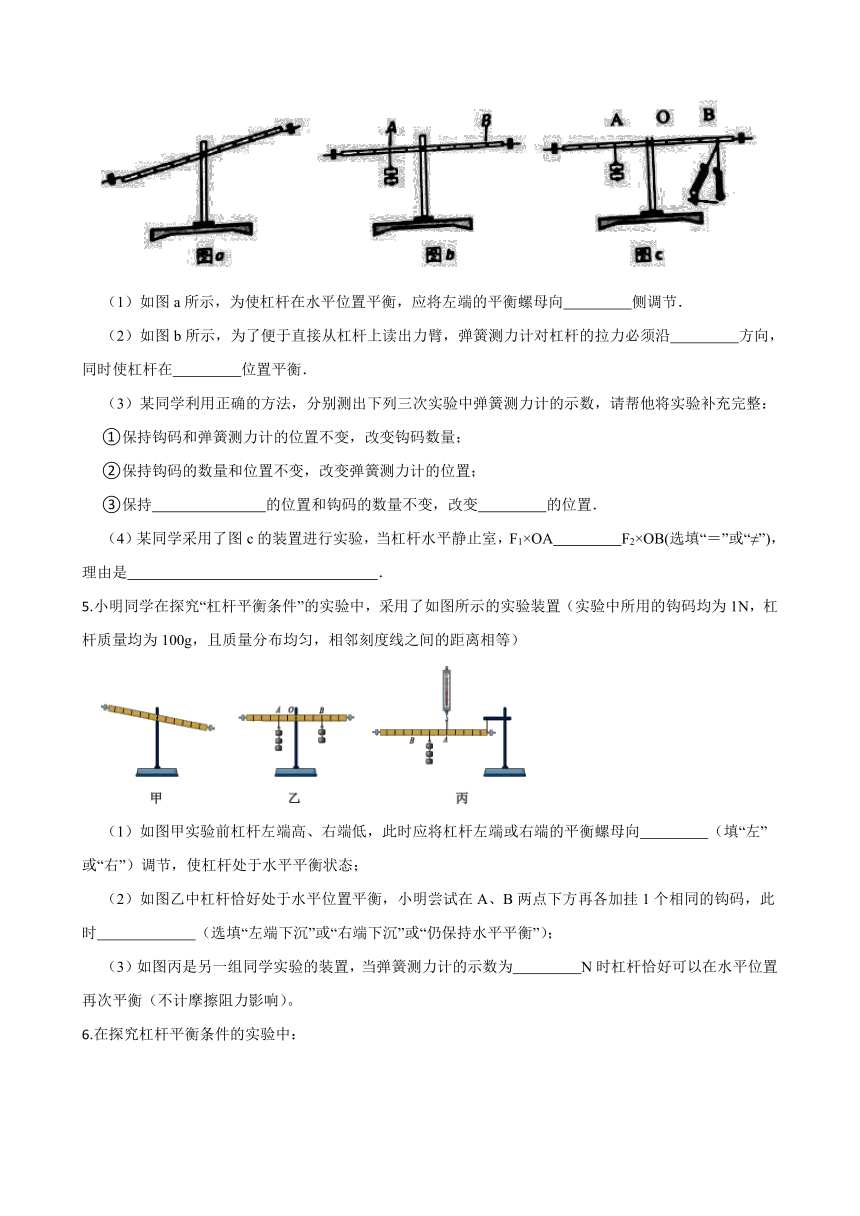
4.在“探究杠杆的平衡条件”实验中:
(1)如图a所示,为使杠杆在水平位置平衡,应将左端的平衡螺母向 侧调节.
(2)如图b所示,为了便于直接从杠杆上读出力臂,弹簧测力计对杠杆的拉力必须沿 方向,同时使杠杆在 位置平衡.
(3)某同学利用正确的方法,分别测出下列三次实验中弹簧测力计的示数,请帮他将实验补充完整:
①保持钩码和弹簧测力计的位置不变,改变钩码数量;
②保持钩码的数量和位置不变,改变弹簧测力计的位置;
③保持 的位置和钩码的数量不变,改变 的位置.
(4)某同学采用了图c的装置进行实验,当杠杆水平静止室,F1×OA F2×OB(选填“=”或“≠”),理由是 .
5.小明同学在探究“杠杆平衡条件”的实验中,采用了如图所示的实验装置(实验中所用的钩码均为1N,杠杆质量均为100g,且质量分布均匀,相邻刻度线之间的距离相等)
(1)如图甲实验前杠杆左端高、右端低,此时应将杠杆左端或右端的平衡螺母向 (填“左”或“右”)调节,使杠杆处于水平平衡状态;
(2)如图乙中杠杆恰好处于水平位置平衡,小明尝试在A、B两点下方再各加挂1个相同的钩码,此时 (选填“左端下沉”或“右端下沉”或“仍保持水平平衡”);
(3)如图丙是另一组同学实验的装置,当弹簧测力计的示数为 N时杠杆恰好可以在水平位置再次平衡(不计摩擦阻力影响)。
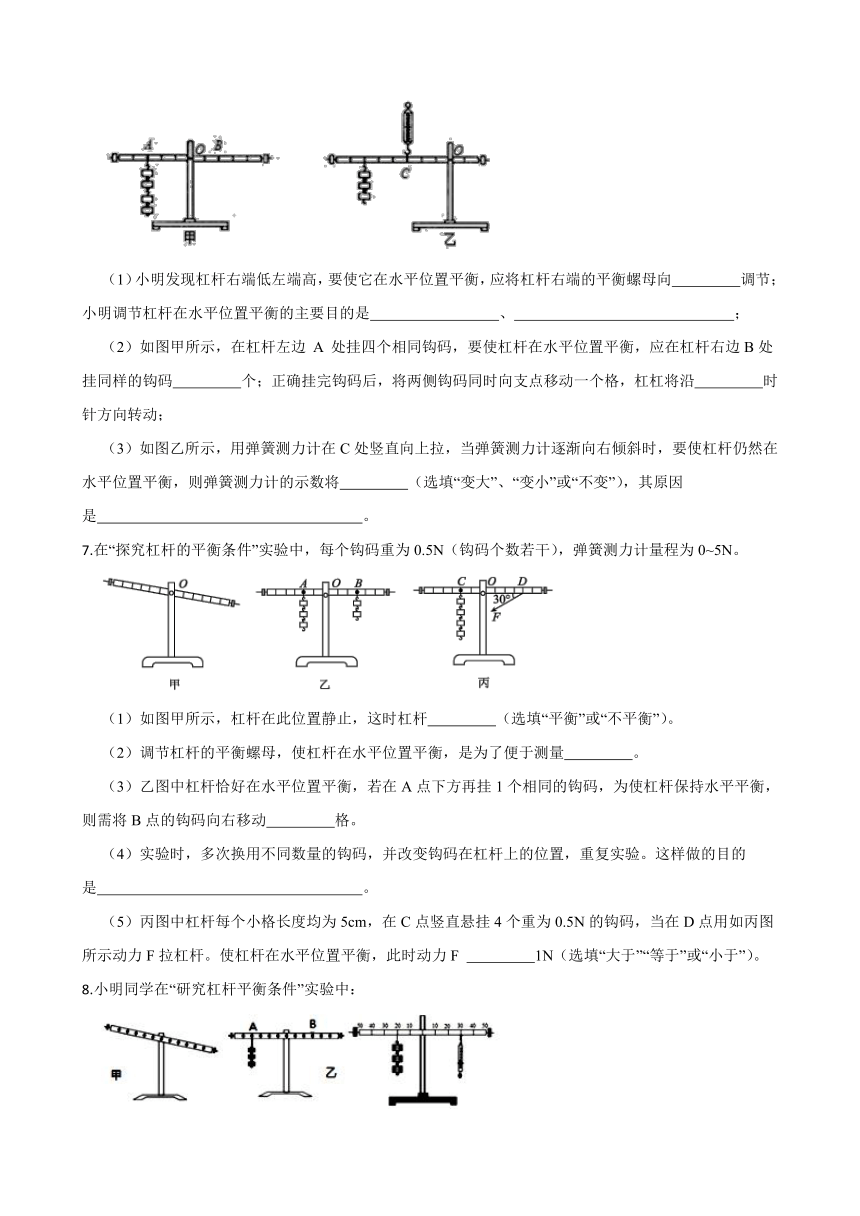
6.在探究杠杆平衡条件的实验中:
(1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节;小明调节杠杆在水平位置平衡的主要目的是 、 ;
(2)如图甲所示,在杠杆左边 A 处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样的钩码 个;正确挂完钩码后,将两侧钩码同时向支点移动一个格,杠杠将沿 时针方向转动;
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,要使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”),其原因是 。
7.在“探究杠杆的平衡条件”实验中,每个钩码重为0.5N(钩码个数若干),弹簧测力计量程为0~5N。
(1)如图甲所示,杠杆在此位置静止,这时杠杆 (选填“平衡”或“不平衡”)。
(2)调节杠杆的平衡螺母,使杠杆在水平位置平衡,是为了便于测量 。
(3)乙图中杠杆恰好在水平位置平衡,若在A点下方再挂1个相同的钩码,为使杠杆保持水平平衡,则需将B点的钩码向右移动 格。
(4)实验时,多次换用不同数量的钩码,并改变钩码在杠杆上的位置,重复实验。这样做的目的是 。
(5)丙图中杠杆每个小格长度均为5cm,在C点竖直悬挂4个重为0.5N的钩码,当在D点用如丙图所示动力F拉杠杆。使杠杆在水平位置平衡,此时动力F 1N(选填“大于”“等于”或“小于”)。
8.小明同学在“研究杠杆平衡条件”实验中:
(1)实验时应先调节杠杆在水平位置平衡,目的是 ;若出现图甲所示情况,应将杠杆的螺母向 (选填“左”或“右”)调。
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上 个钩码。
(3)下表是该组某同学在实验中记录杠杆平衡的部分数据:
上表中空格处所缺的数据是:△= ,☆= ;
(4)分析上表中的实验数据可以得出的结论是 。
(5)接着又用弹簧测力计做了如图丁所示的实验,杠杆平衡后,保持弹簧测力计悬挂点不变,使其拉力方向斜向右下方,仍使杠杆水平平衡,弹簧测力计示数将 (变大、变小或不变),这是因为 。
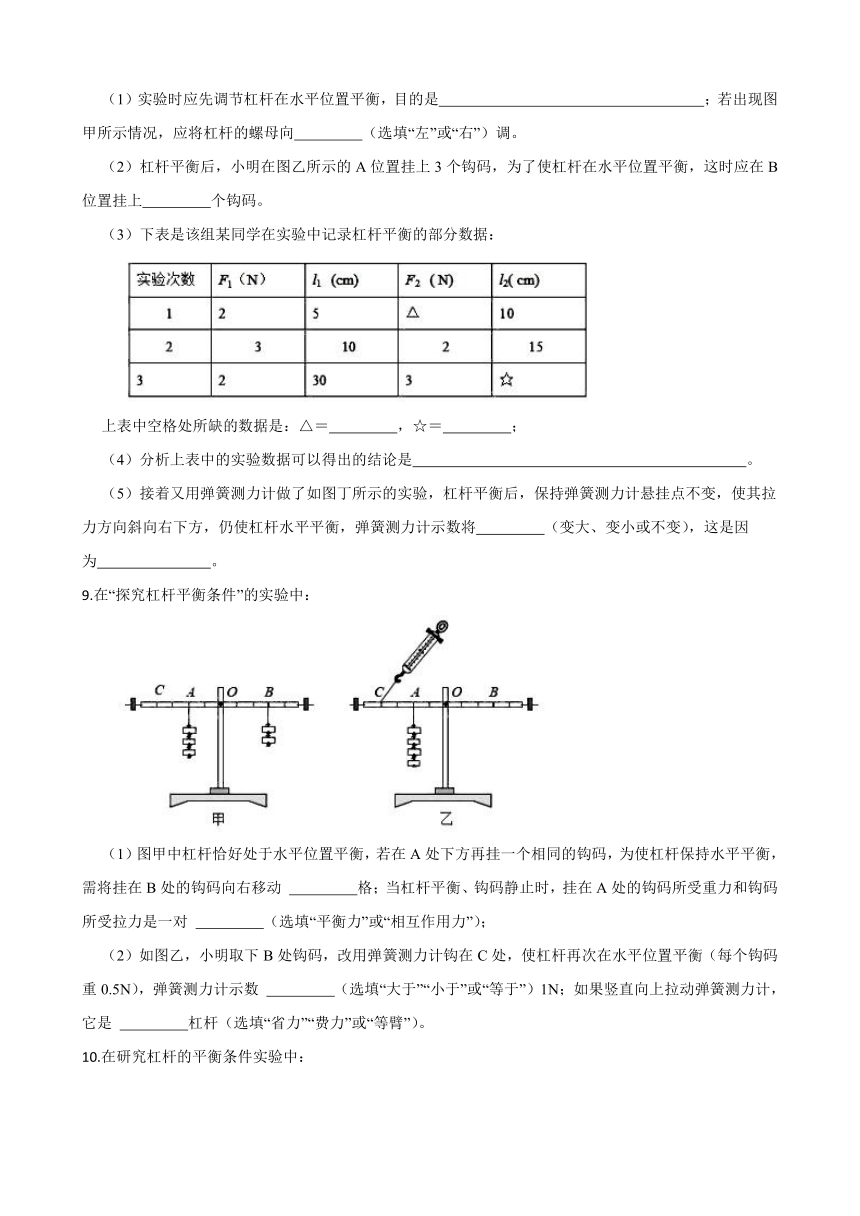
9.在“探究杠杆平衡条件”的实验中:
(1)图甲中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动
格;当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 (选填“平衡力”或“相互作用力”);
(2)如图乙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡(每个钩码重0.5N),弹簧测力计示数 (选填“大于”“小于”或“等于”)1N;如果竖直向上拉动弹簧测力计,它是 杠杆(选填“省力”“费力”或“等臂”)。
10.在研究杠杆的平衡条件实验中:
(1)实验前杠杆倾斜情况如下如图(A)所示,为使它在水平位置平衡,可将左端的平衡螺母向 (选填“左”、“右”)移动.使杠杆在水平位置平衡的好处是 .
(2)实验中共有10个相同的钩码,如图(B)所示,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
答:① ; ② .
(3)如图B中用弹簧测力计在G点第一次竖直向下拉,第二次仍在G点斜向右下方拉,此时弹簧测力计的示数将 。(选填“不变或变小或变大)
(4)如果某组同学在实验前猜想杠杆平衡的条件可能是“动力+动力臂=阻力+阻力臂”.他们经过实验,获得了如下表所示的数据:
于是,他们分析了所得的数据,认为自己的猜想得到了验证,请你指出他们的实验中存在的问题
答:① ;
② .
11.小华研究有关杠杆平衡的问题,他在已调节水平平衡的杠杆上,用弹簧测力计、钩码分别进行实验,研究过程如图所示(弹簧测力计对杠杆的力视为动力、钩码对杠杆的力视为阻力,钩码均相同且位置保持不变),请你根据实验情况和测量结果进行分析和归纳。
(1)由 (选填“a”、“b”、“c”、“d”)两图中动力与动力臂大小间的关系可初步看出:阻力与阻力臂不变,当杠杆平衡时,动力臂越大,所用动力越小;
(2)根据四个图中杠杆的平衡情况与动力、阻力使杠杆转动方向的关系可知:当动力和阻力使杠杆转动的方向 时,杠杆可能平衡;当 时,杠杆不能平衡。
12.小明用图示装置探究“杠杆的平衡条件”。
(1)实验前杠杆静止在如图甲所示的位置,则此时杠杆处于 (选填“平衡”或“不平衡”)状态;为了使杠杆在水平位置平衡,他应该将平衡螺母向 调节;
(2)杠杆在水平位置平衡后,小明在杠杆A、B点分别挂3个、2个钩码(每个钩码质量相同),杠杆恰好在水平位置平衡,如图乙所示。他便马上得出杠杆的平衡条件,同学小亮觉得这种实验处理方法不够完善,理由是 ;
(3)小明将图乙中A、B两点下方挂的钩码同时朝远离支点O的方向移动一小格,则杠杆 (选填“保持平衡”、“左端下沉”或“右端下沉”);
(4)小明若用装置丙进行实验,在保持杠杆水平平衡的情况下,弹簧测力计在B点沿a方向拉变为沿b方向拉,拉力的力臂将 ,若不计弹簧测力计的重力,其示数将 ;(均选填“变大”“变小”或“不变”)
(5)实验结束后,小明在整理器材时发现杠杆很重,这 (选填“会”或“不会”)对实验造成影响。
13.小红和小明利用如图所示装置探究杠杆的平衡条件:
次数 F1/N L1/cm F2/N L2/cm
1 1 10 2 5
2 2 10 1 20
3 2 15 3 10
(1)若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡;
(2)在实验过程中,调节杠杆在水平位置平衡的目的是 ;
(3)在杠杆两端挂加钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂。多次实验并把数据记录在表格中。多次实验的目的是 ;
(4)小明根据以上数据得出杠杆平衡条件是 ;
(5)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使杠杆重新平衡,应在B点挂 个钩码;
(6)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡。当弹簧测力计在原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”“变小”或“不变”)。
14.在探究杠杆平衡条件的实验中:
(1)小睿同学调节杠杆在水平位置平衡的主要目的是便于测量 。
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码 个。
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”“变小”或“不变”),其原因是倾斜时,动力臂 (选填“变大”“变小”或“不变”) 。
15.小明用杠杆、一盒钩码和弹簧测力计等器材,做“探究杠杆平衡条件”的实验.
(1)实验开始时,杠杆的位置如图甲所示.此时应调节杠杆两端的螺母使其向 移动(选填“左”或“右”),以使杠杆水平位置平衡.
(2)小明调节杠杆水平平衡后,在杠杆左侧挂2个钩码,图乙所示.要使杠杆水平平衡,应在A处挂 个钩码.
(3)小明再次在杠杆的两端挂上钩码,杠杆的状态如图丙所示.小明又调节平衡螺母,使杠杆恢复水平平衡.然后记录下动力、阻力、动力臂和阻力臂的数值.他分析实验数据时,发现得不到正确的“杠杆的平衡条件”,其原因是: .
(4)当弹簧测力计由竖直向上拉杠杆变成斜向上拉,如图丁所示.若杠杆仍在水平位置静止,则弹簧测力计的示数一定 (选填“变大”、“不变”或“变小”).
16.小云同学探究杠杆在非水平位置平衡时的条件。
(1)杠杆在如图甲位置平衡,此时杠杆(含螺母)自身的重力作用线______(填序号)
A.通过支点O B.在支点O左侧 C.在支点O右侧
(2)小云进行了如图乙的操作,杠杆静止时测出了力F1、F2和力臂l1、l2。
实验时,小云让杠杆在与未挂勾码前相同倾角的位置平衡的目的是: ;小云同学实验中的错误是: ,正确的做法应是(可在图乙中标注后再用文字说明): 。
(3)小云纠正错误后,进行了三次实验,记录数据如下表小云多次实验的目的是: ;根据表中数据可得出杠杆在非水平位置平衡时的条件是: 。
序号 F1/N F2/N l1/cm l2/cm
1 1 0.8 12 15
2 2 2 10 10
3 2 3.2 16 10
答案
1.(1)增加铁架台的稳定性 (2)左;便于测量力臂
(3)3;<;探究力臂是支点到力的作用点的距离还是支点到力的作用线的距离或力臂大小
(4)能
2.(1)右;力臂 (2)1 (3)动力×动力臂=阻力×阻力臂(用字母表述也可以) (4)C
3.(1)左 (2)一次实验次数太少,结论具有偶然性 (3)一;<
(4)杠杆自身重力对实验结论有影响
4.(1)右 (2)竖直;水平 (3)弹簧测力计;钩码
(4)≠;杠杆自身重力对实验结论有影响
5.(1)左 (2)右端下沉 (3)5.5
6.(1)左;便于测量力臂;消除杠杆重力对实验的影响 (2)6;逆
(3)变大;弹簧测力计对杠杆的拉力力臂变小
7.(1)平衡 (2)力臂 (3)1 (4)避免结论的偶然性,得出普遍规律 (5)大于
8.(1)便于从杠杆上直接读出力臂的数值;左 (2)4 (3)1;20
(4)F1l1=F2l2 (动力×动力臂=阻力×阻力臂)
(5)变大;力臂变小了
9.(1)1;平衡力 (2)大于;省力
10. (1)左;方便测量力臂 (2)C点挂6个钩码;E点挂3个钩码 (3)变大
(4)一次测量具有偈然性,要多次测量;力和力臂取值太特殊化
11.(1)a与b (2)相反;动力和阻力使杠杆转动的方向相同
12.(1)平衡;右 (2)实验次数太少,结论不具有普遍性 (3)左端下沉 (4)变小;变大
(5)不会
13.(1)右 (2)便于测量力臂的大小,同时消除杠杆自重的影响
(3)使结论具有普遍性(或寻找普遍的规律)
(4)F1L1=F2L2(或动力×动力臂=阻力×阻力臂) (5)6 (6)变大
14.(1)力臂 (2)3 (3)变大;变小
15.(1)右 (2)1 (3)挂上钩码后,再次调节平衡螺母 (4)变大
16.(1)A
(2)排除杠杆自身重力的影响;力臂找错了,图中标注的L1、L2不是力F1、F2的力臂;图中L1、L2是力F1、F2的力臂
(3)避免实验出现偶然性以找到普遍规律;F1 l1=F2 l2(或动力乘以动力臂等于阻力乘以阻力臂)
杠杆的平衡条件实验在一些大型考试中时时出现,分值也比较高,本套试卷选了16道题,对基础知识巩固有很好的作用,有助于对知识点的掌握。
1.利用带有刻度的均匀杠杆探究“杠杆平衡条件”,实验所用钩码质量均相等。
(1)实验前,将杠杆安装在水平桌面上的铁架台上,铁架台的底座用密度较大的铁制成,且比较宽大,其目的是 ;
(2)安装好杠杆后,杠杆左端偏高,应将两端的平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡,调到水平位置平衡的目的是 ;
(3)调节好杠杆平衡后,在A处挂上4个钩码(如图a所示),为使杠杆在水平位置平衡,应在B处挂 个钩码。取下钩码,又改用弹簧测力计在B处沿两个方向拉(如图b所示),均使杠杆在水平位置平衡,则两次施加拉力的大小关系为F1 F2(选填“<”、“=”或“>”);实验中在同一位置改变拉力方向,目的是 。
(4)在实验中,小明不慎将杠杆右侧的平衡螺母遗失,于是他在杠杆上右侧适当位置粘了块橡皮泥后杠杆恰好在水平位置平衡(如图c所示),此装置 (能/不能)继续用来完成探究杠杆平衡条件的实验。
2.在探究“杠杆的平衡条件”的实验中:
(1)实验前,杠杆停在如图甲所示的位置,小明应该将杠杆右端平衡螺母向 (填“左”或“右”)调节,使杠杆在水平位置平衡,这样做的目的是便于测量 的大小;
(2)杠杆在水平位置平衡后,在杠杆左边挂上钩码,在右边用测力计竖直向下拉,使杠杆在水平位置重新平衡,如图乙所示,当测力计的示数如图丙所示,则此时测力计的拉力大小是 N;
(3)以测力计拉力为动力F1,钩码重力为阻力F2,多次调整力与力臂的大小来进行测量,得出的数据如表所示:
实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 2 10 2 10
2 1 20 2 10
3 2.5 10 1 25
分析表中数据得出:杠杆的平衡条件是 ;
(4)在本实验中需要进行多次测量的目的是_________;
A.减小误差 B.求平均值 C.使结论具有普遍性
3.甲、乙两位同学做探究杠杆的平衡条件的实验,以杠杆中心为支点,如图甲、乙.
(1)若杠杆右端低左端高,为使其在水平位置上静止,应将左端的平衡螺母向 调节.
(2)如图甲,杠杆在水平位置平衡,记录数据.根据这一次实验数据,甲同学立即分析得出杠杆的平衡条件,这种做法的不足是: .
(3)如图乙,乙同学设计两种实验方案:
第一种弹簧测力计沿竖直方向拉,其读数为F1;
第二种弹簧测力计倾斜拉,其读数为F2.
分析:第 (选填“一”或“二”)种实验方案更方便;
同等条件下,两次弹簧测力计读数F1 (选填“<”、“=”或“>”)F2.
(4)实验结束后,乙同学提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”乙同学利用如图丙装置进行探究,发现当杠杆水平平衡时,与甲同学得出的杠杆平衡条件不相符,其可能的原因是: .
4.在“探究杠杆的平衡条件”实验中:
(1)如图a所示,为使杠杆在水平位置平衡,应将左端的平衡螺母向 侧调节.
(2)如图b所示,为了便于直接从杠杆上读出力臂,弹簧测力计对杠杆的拉力必须沿 方向,同时使杠杆在 位置平衡.
(3)某同学利用正确的方法,分别测出下列三次实验中弹簧测力计的示数,请帮他将实验补充完整:
①保持钩码和弹簧测力计的位置不变,改变钩码数量;
②保持钩码的数量和位置不变,改变弹簧测力计的位置;
③保持 的位置和钩码的数量不变,改变 的位置.
(4)某同学采用了图c的装置进行实验,当杠杆水平静止室,F1×OA F2×OB(选填“=”或“≠”),理由是 .
5.小明同学在探究“杠杆平衡条件”的实验中,采用了如图所示的实验装置(实验中所用的钩码均为1N,杠杆质量均为100g,且质量分布均匀,相邻刻度线之间的距离相等)
(1)如图甲实验前杠杆左端高、右端低,此时应将杠杆左端或右端的平衡螺母向 (填“左”或“右”)调节,使杠杆处于水平平衡状态;
(2)如图乙中杠杆恰好处于水平位置平衡,小明尝试在A、B两点下方再各加挂1个相同的钩码,此时 (选填“左端下沉”或“右端下沉”或“仍保持水平平衡”);
(3)如图丙是另一组同学实验的装置,当弹簧测力计的示数为 N时杠杆恰好可以在水平位置再次平衡(不计摩擦阻力影响)。
6.在探究杠杆平衡条件的实验中:
(1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节;小明调节杠杆在水平位置平衡的主要目的是 、 ;
(2)如图甲所示,在杠杆左边 A 处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样的钩码 个;正确挂完钩码后,将两侧钩码同时向支点移动一个格,杠杠将沿 时针方向转动;
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,要使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”),其原因是 。
7.在“探究杠杆的平衡条件”实验中,每个钩码重为0.5N(钩码个数若干),弹簧测力计量程为0~5N。
(1)如图甲所示,杠杆在此位置静止,这时杠杆 (选填“平衡”或“不平衡”)。
(2)调节杠杆的平衡螺母,使杠杆在水平位置平衡,是为了便于测量 。
(3)乙图中杠杆恰好在水平位置平衡,若在A点下方再挂1个相同的钩码,为使杠杆保持水平平衡,则需将B点的钩码向右移动 格。
(4)实验时,多次换用不同数量的钩码,并改变钩码在杠杆上的位置,重复实验。这样做的目的是 。
(5)丙图中杠杆每个小格长度均为5cm,在C点竖直悬挂4个重为0.5N的钩码,当在D点用如丙图所示动力F拉杠杆。使杠杆在水平位置平衡,此时动力F 1N(选填“大于”“等于”或“小于”)。
8.小明同学在“研究杠杆平衡条件”实验中:
(1)实验时应先调节杠杆在水平位置平衡,目的是 ;若出现图甲所示情况,应将杠杆的螺母向 (选填“左”或“右”)调。
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上 个钩码。
(3)下表是该组某同学在实验中记录杠杆平衡的部分数据:
上表中空格处所缺的数据是:△= ,☆= ;
(4)分析上表中的实验数据可以得出的结论是 。
(5)接着又用弹簧测力计做了如图丁所示的实验,杠杆平衡后,保持弹簧测力计悬挂点不变,使其拉力方向斜向右下方,仍使杠杆水平平衡,弹簧测力计示数将 (变大、变小或不变),这是因为 。
9.在“探究杠杆平衡条件”的实验中:
(1)图甲中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动
格;当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 (选填“平衡力”或“相互作用力”);
(2)如图乙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡(每个钩码重0.5N),弹簧测力计示数 (选填“大于”“小于”或“等于”)1N;如果竖直向上拉动弹簧测力计,它是 杠杆(选填“省力”“费力”或“等臂”)。
10.在研究杠杆的平衡条件实验中:
(1)实验前杠杆倾斜情况如下如图(A)所示,为使它在水平位置平衡,可将左端的平衡螺母向 (选填“左”、“右”)移动.使杠杆在水平位置平衡的好处是 .
(2)实验中共有10个相同的钩码,如图(B)所示,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
答:① ; ② .
(3)如图B中用弹簧测力计在G点第一次竖直向下拉,第二次仍在G点斜向右下方拉,此时弹簧测力计的示数将 。(选填“不变或变小或变大)
(4)如果某组同学在实验前猜想杠杆平衡的条件可能是“动力+动力臂=阻力+阻力臂”.他们经过实验,获得了如下表所示的数据:
于是,他们分析了所得的数据,认为自己的猜想得到了验证,请你指出他们的实验中存在的问题
答:① ;
② .
11.小华研究有关杠杆平衡的问题,他在已调节水平平衡的杠杆上,用弹簧测力计、钩码分别进行实验,研究过程如图所示(弹簧测力计对杠杆的力视为动力、钩码对杠杆的力视为阻力,钩码均相同且位置保持不变),请你根据实验情况和测量结果进行分析和归纳。
(1)由 (选填“a”、“b”、“c”、“d”)两图中动力与动力臂大小间的关系可初步看出:阻力与阻力臂不变,当杠杆平衡时,动力臂越大,所用动力越小;
(2)根据四个图中杠杆的平衡情况与动力、阻力使杠杆转动方向的关系可知:当动力和阻力使杠杆转动的方向 时,杠杆可能平衡;当 时,杠杆不能平衡。
12.小明用图示装置探究“杠杆的平衡条件”。
(1)实验前杠杆静止在如图甲所示的位置,则此时杠杆处于 (选填“平衡”或“不平衡”)状态;为了使杠杆在水平位置平衡,他应该将平衡螺母向 调节;
(2)杠杆在水平位置平衡后,小明在杠杆A、B点分别挂3个、2个钩码(每个钩码质量相同),杠杆恰好在水平位置平衡,如图乙所示。他便马上得出杠杆的平衡条件,同学小亮觉得这种实验处理方法不够完善,理由是 ;
(3)小明将图乙中A、B两点下方挂的钩码同时朝远离支点O的方向移动一小格,则杠杆 (选填“保持平衡”、“左端下沉”或“右端下沉”);
(4)小明若用装置丙进行实验,在保持杠杆水平平衡的情况下,弹簧测力计在B点沿a方向拉变为沿b方向拉,拉力的力臂将 ,若不计弹簧测力计的重力,其示数将 ;(均选填“变大”“变小”或“不变”)
(5)实验结束后,小明在整理器材时发现杠杆很重,这 (选填“会”或“不会”)对实验造成影响。
13.小红和小明利用如图所示装置探究杠杆的平衡条件:
次数 F1/N L1/cm F2/N L2/cm
1 1 10 2 5
2 2 10 1 20
3 2 15 3 10
(1)若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡;
(2)在实验过程中,调节杠杆在水平位置平衡的目的是 ;
(3)在杠杆两端挂加钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂。多次实验并把数据记录在表格中。多次实验的目的是 ;
(4)小明根据以上数据得出杠杆平衡条件是 ;
(5)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使杠杆重新平衡,应在B点挂 个钩码;
(6)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡。当弹簧测力计在原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”“变小”或“不变”)。
14.在探究杠杆平衡条件的实验中:
(1)小睿同学调节杠杆在水平位置平衡的主要目的是便于测量 。
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码 个。
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”“变小”或“不变”),其原因是倾斜时,动力臂 (选填“变大”“变小”或“不变”) 。
15.小明用杠杆、一盒钩码和弹簧测力计等器材,做“探究杠杆平衡条件”的实验.
(1)实验开始时,杠杆的位置如图甲所示.此时应调节杠杆两端的螺母使其向 移动(选填“左”或“右”),以使杠杆水平位置平衡.
(2)小明调节杠杆水平平衡后,在杠杆左侧挂2个钩码,图乙所示.要使杠杆水平平衡,应在A处挂 个钩码.
(3)小明再次在杠杆的两端挂上钩码,杠杆的状态如图丙所示.小明又调节平衡螺母,使杠杆恢复水平平衡.然后记录下动力、阻力、动力臂和阻力臂的数值.他分析实验数据时,发现得不到正确的“杠杆的平衡条件”,其原因是: .
(4)当弹簧测力计由竖直向上拉杠杆变成斜向上拉,如图丁所示.若杠杆仍在水平位置静止,则弹簧测力计的示数一定 (选填“变大”、“不变”或“变小”).
16.小云同学探究杠杆在非水平位置平衡时的条件。
(1)杠杆在如图甲位置平衡,此时杠杆(含螺母)自身的重力作用线______(填序号)
A.通过支点O B.在支点O左侧 C.在支点O右侧
(2)小云进行了如图乙的操作,杠杆静止时测出了力F1、F2和力臂l1、l2。
实验时,小云让杠杆在与未挂勾码前相同倾角的位置平衡的目的是: ;小云同学实验中的错误是: ,正确的做法应是(可在图乙中标注后再用文字说明): 。
(3)小云纠正错误后,进行了三次实验,记录数据如下表小云多次实验的目的是: ;根据表中数据可得出杠杆在非水平位置平衡时的条件是: 。
序号 F1/N F2/N l1/cm l2/cm
1 1 0.8 12 15
2 2 2 10 10
3 2 3.2 16 10
答案
1.(1)增加铁架台的稳定性 (2)左;便于测量力臂
(3)3;<;探究力臂是支点到力的作用点的距离还是支点到力的作用线的距离或力臂大小
(4)能
2.(1)右;力臂 (2)1 (3)动力×动力臂=阻力×阻力臂(用字母表述也可以) (4)C
3.(1)左 (2)一次实验次数太少,结论具有偶然性 (3)一;<
(4)杠杆自身重力对实验结论有影响
4.(1)右 (2)竖直;水平 (3)弹簧测力计;钩码
(4)≠;杠杆自身重力对实验结论有影响
5.(1)左 (2)右端下沉 (3)5.5
6.(1)左;便于测量力臂;消除杠杆重力对实验的影响 (2)6;逆
(3)变大;弹簧测力计对杠杆的拉力力臂变小
7.(1)平衡 (2)力臂 (3)1 (4)避免结论的偶然性,得出普遍规律 (5)大于
8.(1)便于从杠杆上直接读出力臂的数值;左 (2)4 (3)1;20
(4)F1l1=F2l2 (动力×动力臂=阻力×阻力臂)
(5)变大;力臂变小了
9.(1)1;平衡力 (2)大于;省力
10. (1)左;方便测量力臂 (2)C点挂6个钩码;E点挂3个钩码 (3)变大
(4)一次测量具有偈然性,要多次测量;力和力臂取值太特殊化
11.(1)a与b (2)相反;动力和阻力使杠杆转动的方向相同
12.(1)平衡;右 (2)实验次数太少,结论不具有普遍性 (3)左端下沉 (4)变小;变大
(5)不会
13.(1)右 (2)便于测量力臂的大小,同时消除杠杆自重的影响
(3)使结论具有普遍性(或寻找普遍的规律)
(4)F1L1=F2L2(或动力×动力臂=阻力×阻力臂) (5)6 (6)变大
14.(1)力臂 (2)3 (3)变大;变小
15.(1)右 (2)1 (3)挂上钩码后,再次调节平衡螺母 (4)变大
16.(1)A
(2)排除杠杆自身重力的影响;力臂找错了,图中标注的L1、L2不是力F1、F2的力臂;图中L1、L2是力F1、F2的力臂
(3)避免实验出现偶然性以找到普遍规律;F1 l1=F2 l2(或动力乘以动力臂等于阻力乘以阻力臂)