浙江学考选考·技术与设计二·考点8 开环控制与设计 (Word版,含答案)
文档属性
| 名称 | 浙江学考选考·技术与设计二·考点8 开环控制与设计 (Word版,含答案) |  | |
| 格式 | zip | ||
| 文件大小 | 1.9MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2023-01-05 22:19:46 | ||
图片预览


文档简介
考点8——开环控制与设计
1. 如图所示是一款汽车卸煤喷水系统。检测装置采集运煤汽车到位及离开信号,并将采集的信号传到控制器,控制器根据预设的程序指令,控制电磁阀定时开启,除尘喷头持续喷水,清除因汽车卸煤产生的煤尘。下列有关该喷水系统说法正确的是( )
A.该系统是闭环控制系统
B.被控对象是煤尘
C.输入量是卸煤车间的煤尘量
D.输出量是喷水量
2. 如a图为漏电保护电路结构图,b图为电路控制原理图。小明根据图获知当有人触电时二次绕线组会产生磁场,将主开关断开,若无人触电,则不会主动断开主控开关。关于该控制系统的说法中,以下合理的是( )
图a 图b
A.该控制系统是开环控制
B.该控制系统的输出量量是输入的电压
C.被控对象是触电的人
D.该卷带恒张力控制系统为闭环控制
3. 如图所示是某物品分选控制系统示意图。工作时,光电检测器PH1检测到次品时,PLC装置向电磁装置下达指令,电磁装置动作将次品推入次品工件箱;检测器PH2检测到次品落下时,PLC装置向电磁装置下达指令复位缩回,正品则到9号工位落入正品工件箱。关于该分选控制系统,以下说法中正确的是( )
A.输出量是电磁装置是否复位
B.被控对象是待分选的物品
C.控制器是电磁装置
D.反馈装置是光电检测器
4. 如图所示是消防联动控制系统。在发生火灾时,消防联动控制器按设定的控制逻辑向消防供水泵、报警阀、消防卷帘门和防烟排烟阀和通风消防设施准确发出联动控制信号,实现对自动灭火系统、火灾警报、防火分隔系统、防烟排烟系统的联动控制,接收并显示上述系统设备的动作反馈信号,同时接收消防水池、高位水箱等消防设施的动态监测信号,实现对建筑消防设施的状态监视功能。自动灭火控制子系统,其工作原理是在发生火灾时传感器将信号送至消防联动控制器,控制器控制供水泵启动进行灭火。下列关于自动灭火控制子系统的分析中正确的是( )
A.传感器检测的是输出量
B.控制器是供水泵
C.该系统属于开环控制系统
D.控制量是灭火
5. 如图所示为某新型居民水表控制系统,该系统包括流量监测仪、水表、控制阀、电机和控制箱。工作过程为流量监测仪实时监测用水量信号并通过手机显示该数值,控制箱采集流量监测仪的数值并将该数值和水表设定值比较,若超过设定值,则控制箱控制电机动作,进而带动控制阀关闭,最终切断用户用水。从控制系统的角度分析,以下说法正确的是( )
A.该控制系统属于闭环控制系统
B.该控制系统的控制器是手机
C.被控对象是控制阀
D.该控制系统的控制手段属于液压控制
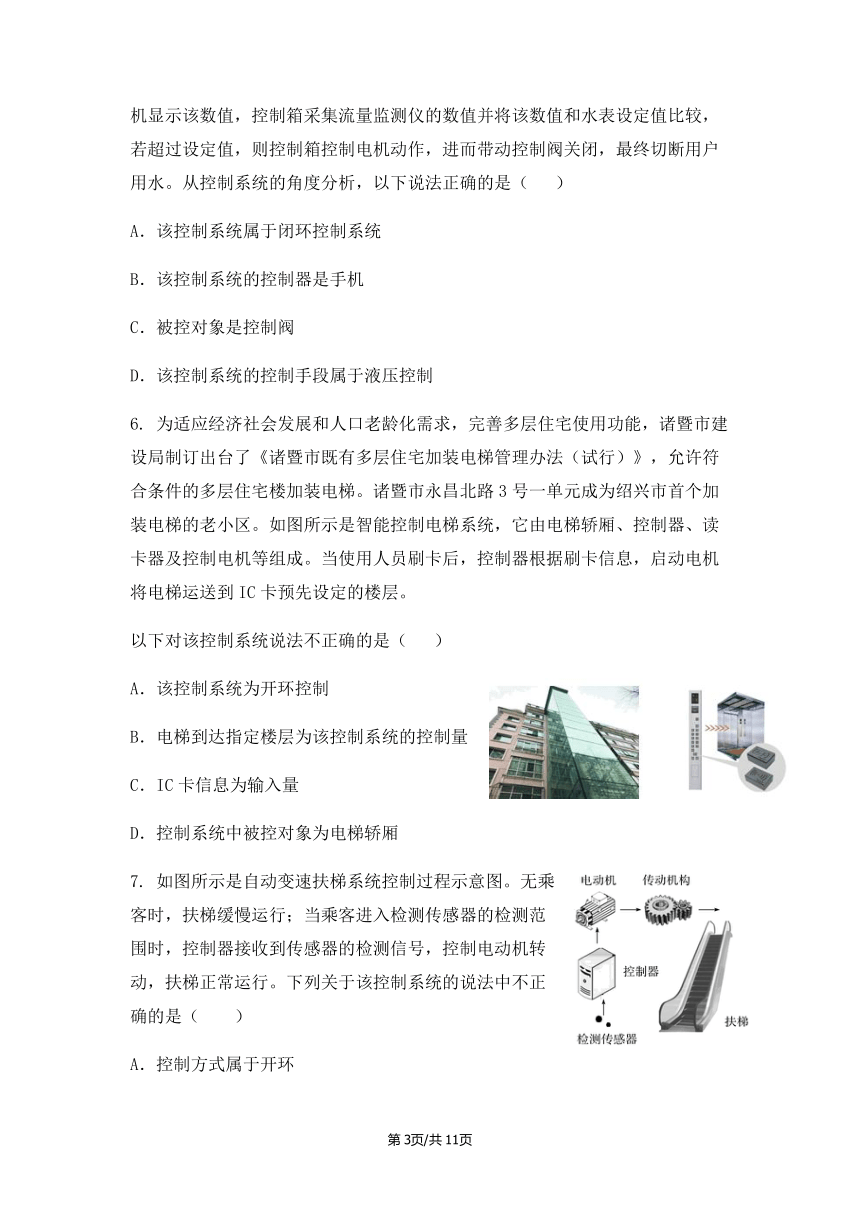
6. 为适应经济社会发展和人口老龄化需求,完善多层住宅使用功能,诸暨市建设局制订出台了《诸暨市既有多层住宅加装电梯管理办法(试行)》,允许符合条件的多层住宅楼加装电梯。诸暨市永昌北路3号一单元成为绍兴市首个加装电梯的老小区。如图所示是智能控制电梯系统,它由电梯轿厢、控制器、读卡器及控制电机等组成。当使用人员刷卡后,控制器根据刷卡信息,启动电机将电梯运送到IC卡预先设定的楼层。
以下对该控制系统说法不正确的是( )
A.该控制系统为开环控制
B.电梯到达指定楼层为该控制系统的控制量
C.IC卡信息为输入量
D.控制系统中被控对象为电梯轿厢
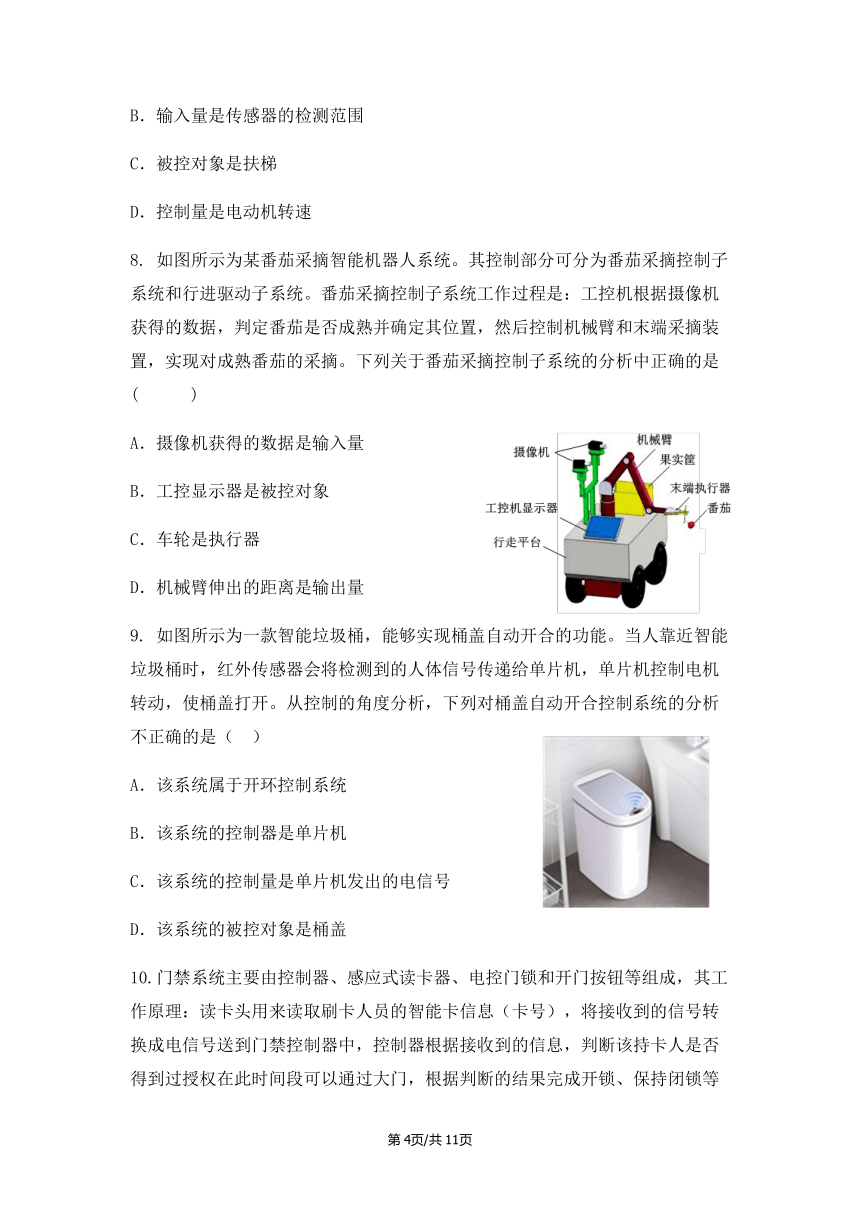
7. 如图所示是自动变速扶梯系统控制过程示意图。无乘客时,扶梯缓慢运行;当乘客进入检测传感器的检测范围时,控制器接收到传感器的检测信号,控制电动机转动,扶梯正常运行。下列关于该控制系统的说法中不正确的是( )
A.控制方式属于开环
B.输入量是传感器的检测范围
C.被控对象是扶梯
D.控制量是电动机转速
8. 如图所示为某番茄采摘智能机器人系统。其控制部分可分为番茄采摘控制子系统和行进驱动子系统。番茄采摘控制子系统工作过程是:工控机根据摄像机获得的数据,判定番茄是否成熟并确定其位置,然后控制机械臂和末端采摘装置,实现对成熟番茄的采摘。下列关于番茄采摘控制子系统的分析中正确的是( )
A.摄像机获得的数据是输入量
B.工控显示器是被控对象
C.车轮是执行器
D.机械臂伸出的距离是输出量
9. 如图所示为一款智能垃圾桶,能够实现桶盖自动开合的功能。当人靠近智能垃圾桶时,红外传感器会将检测到的人体信号传递给单片机,单片机控制电机转动,使桶盖打开。从控制的角度分析,下列对桶盖自动开合控制系统的分析不正确的是( )
A.该系统属于开环控制系统
B.该系统的控制器是单片机
C.该系统的控制量是单片机发出的电信号
D.该系统的被控对象是桶盖
10.门禁系统主要由控制器、感应式读卡器、电控门锁和开门按钮等组成,其工作原理:读卡头用来读取刷卡人员的智能卡信息(卡号),将接收到的信号转换成电信号送到门禁控制器中,控制器根据接收到的信息,判断该持卡人是否得到过授权在此时间段可以通过大门,根据判断的结果完成开锁、保持闭锁等工作。小明外出学习时经常忘了带智能卡,而不能正常开门,他学习了有关控制系统的知识后,希望通过增加人脸识别装置来实现系统优化,设计时他以门锁为被控对象,下列构思可行的是( )
A.电子形状可作为系统的输入装置
B.优化后的门禁系统还存在检测装置
C.优化后的门禁系统属于闭环控制系统
D.人脸识别子系统和读卡子系统间互不相关
11. 越来越多的学校大门都安装了如图所示的人脸识别道闸。当有人员进入时,进入人员的图像被控制主机识别、匹配,若匹配成功,向电机发送指令,道闸开启放行;若匹配不成功,道闸不予开启。下列关于该控制系统的分析正确的是( )
A.该系统的控制手段和控制方式分别属于开环控制和自动控制
B.被控对象是人员图像
C.环境亮度属于影响道闸正确开启的干扰因素
D.被控量是电机的转动
12. 如下图所示为非接触式红外测温系统原理结构图,它是集信号采集、数据处理、误差分析、输出显示及危险报警为一体的多功能、智能化的测温系统,广泛应用于生产和生活中。关于非接触式红外测温系统的测温显示和报警控制过程,下列分析中正确的是( )
A.A/D转换器输出信号属于控制量
B.测温报警控制过程的被控对象是发热体
C.光照会使发热体温度升高,属于干扰因素
D.报警控制过程属于开环控制,存在检测的过程
13. 根据消防要求,仓库、图书馆等场所需要安装火灾自动报警控制系统。如有火灾发生,烟雾探测器检测到室内的烟雾信号,经控制电路分析处理后,驱动扬声器发出报警声。下列对该控制系统的分析中不正确的是( )
A.被控对象是扬声器 B.输出量是报警声
C.控制量是烟雾的浓度 D.控制的方式是开环控制
14. 如图所示为制动压力调节系统,主要由ECU、电磁阀、液压泵、储液器、轮缸等组成。当常规制动时,主缸内油压由踏板控制直接传递给轮缸,实现制动压力调节(如图甲)。当紧急制动车轮即将抱死时,ECU控制电磁阀使柱塞移至上端,柱塞中的油路断开(如图乙),轮缸的油液流入储液器,从而使轮缸制动压力瞬间降低,同时ECU指令液压泵将储液器油液送至主缸,恢复常规制动。
图甲 图乙
当紧急制动车轮即将抱死时,关于该制动压力调节系统的说法正确的是( )
A.该控制系统为闭环控制 B.电磁阀、液压泵是执行器
C.主缸内的油液是被控对象 D.轮速的变化属于干扰因素
15. 如图所示为传统高层建筑水塔水位控制系统设计方案。系统启动后,若水池水位低于设定最低水位S1,液位传感器向PLC发出信号,PLC根据此信号打开电磁阀和水泵电机向水池注水,若5S后水池水位没有超过下限液位开关S1,则系统发出警报;若系统正常运行,当水位达到水池最高水位S2时,电磁阀自动关闭结束进水;当水塔水位低于最低水位S3时,水塔中液位传感器同样能够向PLC发出信号实现往水塔注水,当水塔水位达到最高水位S4时自动关闭进水。关于上述控制系统,下列说法中正确的是( )
A.水塔水位控制系统的控制器是PLC
B.水塔水位控制系统的输入量和输出量都是设定水位
C.电机M2的作用是将水从水塔抽入到缺水的水池中
D.水塔水位控制和水位警报控制都属于闭环控制
16. 如图所示为机械手臂控制系统的工作示意图。该系统由电液伺服阀、液压缸、电位器、放 大器等部分构成。该控制系统的工作原理如下:步进电机接收数控装置发出的指令后带动电位器的触头转动一定的角度,电位器的动触头偏离了中位会发出电信号,电信号经过放大器放大后驱动电液伺服阀,电液伺服阀的移动使得液压缸内左右腔形成压力差驱动机械手臂伸缩。机 械手臂与电位器的固定外壳用齿轮齿条结构连接,机械手臂的移动会带动电位的外壳转动,直 至电位器的活动触头回到固定外壳的中位,机械手臂就停止移动。下列关于机械手臂控制系统的说法不正确的是( )
A.该控制系统为液压控制系统 B.放大器损坏是干扰因素
C.控制量为电液伺服阀的移动量 D.机械手臂的移动量不对控制的过程产生影响
17. 某校科技兴趣小组制作了人脸识别的门控系统,其基本工作过程是:安装在门框上的摄像头检测到人脸数据,并传输至树莓派主板,树莓派根据编写好的python程序语言进行分析、处理,与已存面部数据进行比较,若对比成功,则通过电机开门,否则蜂鸣器报警。下列关于该控制系统的分析正确的是( )
A.摄像头是反馈装置的组成部分
B.树莓派上的python程序语言是控制器
C.门和蜂鸣器都作为系统的被控对象
D.工作过程中存在比较,故控制方式为闭环
18. 某人脸识别门控系统的控制过程是:当摄像头检测到人脸时,Arduino 主板根据设定好的程序语言,对检测到的人脸数据分析处理,与库中存有的人脸数据对比,若对比成功,则电机转动,驱动门打开,否则发出报警声。下列分析不正确的是( )
A.Arduino 主板是控制器 B.门和报警装置都是被控对象
C.库中人脸数据是系统的输入量 D.电机是执行器
19. LEGO魔方机器人近几年深受广大青少年儿童的喜爱,它的工作原理是先用传感器采集魔方6个面上每块(1面有9块)的颜色,然后由主控制器根据特定算法计算结果,控制机械手翻转魔方,从而达到自动解魔方的效果。如果魔方的颜色不标准或者周围的光线太暗,都会对魔方机器人解魔方形成干扰。根据示意图和描述,完成以下任务:
(1)该系统的控制手段和控制方式分别属于________和________(①人工控制;②自动控制;③开环控制;④闭环控制);
(2)该控制系统的执行器和被控对象分别是________、________(①LEGO主控制器;②机械手;③魔方);
(3)该系统中的传感器应选用________(①声音传感器;②颜色传感器;③温度传感器);
(4)为了提高LEGO魔方机器人识别魔方6个面颜色的效果,设计人员针对不同的光线环境做了大量的实验,得出一系列数据,对魔方的感光敏感度进行了调整,体现系统分析的____(①整体性原则;②科学性原则;③综合性原则)。
20. 如图所示是一款智能油烟机,350mm超薄机身,采用不锈钢一体成型,拐角采用大圆角设计,直流变频无极变速电机,能自动根据烟道阻力无极变速风压及风量,强力吸排油烟。内置热水自动清洗系统,深度洗净内腔油污,动力如初,延长油烟机寿命。搭载AI手势控制系统,抬手轻挥就能开关机、调风量,告别用沾满油污的手去按键。当人忘记开启油烟机时,油烟机探头感知到灶具热量,开启油烟机排油烟工作。请根据以上资料的描述,完成以下任务:
(1)油烟机探头感知到灶具热量,开启油烟机,该系统的控制手段和方式属于____ 、 (在“A.开环控制;B.闭环控制;C.人工控制;D.自动控制”中选择合适的选项,将序号填入“ ”处);
(2)系统设计时,需要对传感器、集成电路、电机等的工作参数进行计算和反复调试,体现了系统分析的____(在“A.整体性原则;B.科学性原则;C.综合性原则”中选择合适的选项,将序号填入“ ”处);
(3)挥手净烟时系统中的传感器可选用____(在A.位移传感器;B.热敏传感器;C.压力传感器中选择合适的选项,将序号填写在“ ”处)
(4)下列连接件中,最适合油烟机与墙壁连接的是____(在下列选项中选择合适的选项,将序号填入“ ”处);
A B C D
(5)下列因素中,不属于影响本系统优化的因素的是____(在A.传感器的灵敏度;B.控制系统的精度和可靠性;C.人的炒菜习惯;D.电机的功率中选择合适的选项,将序号填写在“ ”处)
【参考答案】
1 2 3 4 5 6 7 8 9 10
D A B C C B B A C B
11 12 13 14 15 16 17 18 19 20
C D C B A D C C
(1) ② ③ , (2) ② ③, (3) ②, (4) ②
20.(1)DA (2) B (3) A (4) A (5) C
第1页/共11页
1. 如图所示是一款汽车卸煤喷水系统。检测装置采集运煤汽车到位及离开信号,并将采集的信号传到控制器,控制器根据预设的程序指令,控制电磁阀定时开启,除尘喷头持续喷水,清除因汽车卸煤产生的煤尘。下列有关该喷水系统说法正确的是( )
A.该系统是闭环控制系统
B.被控对象是煤尘
C.输入量是卸煤车间的煤尘量
D.输出量是喷水量
2. 如a图为漏电保护电路结构图,b图为电路控制原理图。小明根据图获知当有人触电时二次绕线组会产生磁场,将主开关断开,若无人触电,则不会主动断开主控开关。关于该控制系统的说法中,以下合理的是( )
图a 图b
A.该控制系统是开环控制
B.该控制系统的输出量量是输入的电压
C.被控对象是触电的人
D.该卷带恒张力控制系统为闭环控制
3. 如图所示是某物品分选控制系统示意图。工作时,光电检测器PH1检测到次品时,PLC装置向电磁装置下达指令,电磁装置动作将次品推入次品工件箱;检测器PH2检测到次品落下时,PLC装置向电磁装置下达指令复位缩回,正品则到9号工位落入正品工件箱。关于该分选控制系统,以下说法中正确的是( )
A.输出量是电磁装置是否复位
B.被控对象是待分选的物品
C.控制器是电磁装置
D.反馈装置是光电检测器
4. 如图所示是消防联动控制系统。在发生火灾时,消防联动控制器按设定的控制逻辑向消防供水泵、报警阀、消防卷帘门和防烟排烟阀和通风消防设施准确发出联动控制信号,实现对自动灭火系统、火灾警报、防火分隔系统、防烟排烟系统的联动控制,接收并显示上述系统设备的动作反馈信号,同时接收消防水池、高位水箱等消防设施的动态监测信号,实现对建筑消防设施的状态监视功能。自动灭火控制子系统,其工作原理是在发生火灾时传感器将信号送至消防联动控制器,控制器控制供水泵启动进行灭火。下列关于自动灭火控制子系统的分析中正确的是( )
A.传感器检测的是输出量
B.控制器是供水泵
C.该系统属于开环控制系统
D.控制量是灭火
5. 如图所示为某新型居民水表控制系统,该系统包括流量监测仪、水表、控制阀、电机和控制箱。工作过程为流量监测仪实时监测用水量信号并通过手机显示该数值,控制箱采集流量监测仪的数值并将该数值和水表设定值比较,若超过设定值,则控制箱控制电机动作,进而带动控制阀关闭,最终切断用户用水。从控制系统的角度分析,以下说法正确的是( )
A.该控制系统属于闭环控制系统
B.该控制系统的控制器是手机
C.被控对象是控制阀
D.该控制系统的控制手段属于液压控制
6. 为适应经济社会发展和人口老龄化需求,完善多层住宅使用功能,诸暨市建设局制订出台了《诸暨市既有多层住宅加装电梯管理办法(试行)》,允许符合条件的多层住宅楼加装电梯。诸暨市永昌北路3号一单元成为绍兴市首个加装电梯的老小区。如图所示是智能控制电梯系统,它由电梯轿厢、控制器、读卡器及控制电机等组成。当使用人员刷卡后,控制器根据刷卡信息,启动电机将电梯运送到IC卡预先设定的楼层。
以下对该控制系统说法不正确的是( )
A.该控制系统为开环控制
B.电梯到达指定楼层为该控制系统的控制量
C.IC卡信息为输入量
D.控制系统中被控对象为电梯轿厢
7. 如图所示是自动变速扶梯系统控制过程示意图。无乘客时,扶梯缓慢运行;当乘客进入检测传感器的检测范围时,控制器接收到传感器的检测信号,控制电动机转动,扶梯正常运行。下列关于该控制系统的说法中不正确的是( )
A.控制方式属于开环
B.输入量是传感器的检测范围
C.被控对象是扶梯
D.控制量是电动机转速
8. 如图所示为某番茄采摘智能机器人系统。其控制部分可分为番茄采摘控制子系统和行进驱动子系统。番茄采摘控制子系统工作过程是:工控机根据摄像机获得的数据,判定番茄是否成熟并确定其位置,然后控制机械臂和末端采摘装置,实现对成熟番茄的采摘。下列关于番茄采摘控制子系统的分析中正确的是( )
A.摄像机获得的数据是输入量
B.工控显示器是被控对象
C.车轮是执行器
D.机械臂伸出的距离是输出量
9. 如图所示为一款智能垃圾桶,能够实现桶盖自动开合的功能。当人靠近智能垃圾桶时,红外传感器会将检测到的人体信号传递给单片机,单片机控制电机转动,使桶盖打开。从控制的角度分析,下列对桶盖自动开合控制系统的分析不正确的是( )
A.该系统属于开环控制系统
B.该系统的控制器是单片机
C.该系统的控制量是单片机发出的电信号
D.该系统的被控对象是桶盖
10.门禁系统主要由控制器、感应式读卡器、电控门锁和开门按钮等组成,其工作原理:读卡头用来读取刷卡人员的智能卡信息(卡号),将接收到的信号转换成电信号送到门禁控制器中,控制器根据接收到的信息,判断该持卡人是否得到过授权在此时间段可以通过大门,根据判断的结果完成开锁、保持闭锁等工作。小明外出学习时经常忘了带智能卡,而不能正常开门,他学习了有关控制系统的知识后,希望通过增加人脸识别装置来实现系统优化,设计时他以门锁为被控对象,下列构思可行的是( )
A.电子形状可作为系统的输入装置
B.优化后的门禁系统还存在检测装置
C.优化后的门禁系统属于闭环控制系统
D.人脸识别子系统和读卡子系统间互不相关
11. 越来越多的学校大门都安装了如图所示的人脸识别道闸。当有人员进入时,进入人员的图像被控制主机识别、匹配,若匹配成功,向电机发送指令,道闸开启放行;若匹配不成功,道闸不予开启。下列关于该控制系统的分析正确的是( )
A.该系统的控制手段和控制方式分别属于开环控制和自动控制
B.被控对象是人员图像
C.环境亮度属于影响道闸正确开启的干扰因素
D.被控量是电机的转动
12. 如下图所示为非接触式红外测温系统原理结构图,它是集信号采集、数据处理、误差分析、输出显示及危险报警为一体的多功能、智能化的测温系统,广泛应用于生产和生活中。关于非接触式红外测温系统的测温显示和报警控制过程,下列分析中正确的是( )
A.A/D转换器输出信号属于控制量
B.测温报警控制过程的被控对象是发热体
C.光照会使发热体温度升高,属于干扰因素
D.报警控制过程属于开环控制,存在检测的过程
13. 根据消防要求,仓库、图书馆等场所需要安装火灾自动报警控制系统。如有火灾发生,烟雾探测器检测到室内的烟雾信号,经控制电路分析处理后,驱动扬声器发出报警声。下列对该控制系统的分析中不正确的是( )
A.被控对象是扬声器 B.输出量是报警声
C.控制量是烟雾的浓度 D.控制的方式是开环控制
14. 如图所示为制动压力调节系统,主要由ECU、电磁阀、液压泵、储液器、轮缸等组成。当常规制动时,主缸内油压由踏板控制直接传递给轮缸,实现制动压力调节(如图甲)。当紧急制动车轮即将抱死时,ECU控制电磁阀使柱塞移至上端,柱塞中的油路断开(如图乙),轮缸的油液流入储液器,从而使轮缸制动压力瞬间降低,同时ECU指令液压泵将储液器油液送至主缸,恢复常规制动。
图甲 图乙
当紧急制动车轮即将抱死时,关于该制动压力调节系统的说法正确的是( )
A.该控制系统为闭环控制 B.电磁阀、液压泵是执行器
C.主缸内的油液是被控对象 D.轮速的变化属于干扰因素
15. 如图所示为传统高层建筑水塔水位控制系统设计方案。系统启动后,若水池水位低于设定最低水位S1,液位传感器向PLC发出信号,PLC根据此信号打开电磁阀和水泵电机向水池注水,若5S后水池水位没有超过下限液位开关S1,则系统发出警报;若系统正常运行,当水位达到水池最高水位S2时,电磁阀自动关闭结束进水;当水塔水位低于最低水位S3时,水塔中液位传感器同样能够向PLC发出信号实现往水塔注水,当水塔水位达到最高水位S4时自动关闭进水。关于上述控制系统,下列说法中正确的是( )
A.水塔水位控制系统的控制器是PLC
B.水塔水位控制系统的输入量和输出量都是设定水位
C.电机M2的作用是将水从水塔抽入到缺水的水池中
D.水塔水位控制和水位警报控制都属于闭环控制
16. 如图所示为机械手臂控制系统的工作示意图。该系统由电液伺服阀、液压缸、电位器、放 大器等部分构成。该控制系统的工作原理如下:步进电机接收数控装置发出的指令后带动电位器的触头转动一定的角度,电位器的动触头偏离了中位会发出电信号,电信号经过放大器放大后驱动电液伺服阀,电液伺服阀的移动使得液压缸内左右腔形成压力差驱动机械手臂伸缩。机 械手臂与电位器的固定外壳用齿轮齿条结构连接,机械手臂的移动会带动电位的外壳转动,直 至电位器的活动触头回到固定外壳的中位,机械手臂就停止移动。下列关于机械手臂控制系统的说法不正确的是( )
A.该控制系统为液压控制系统 B.放大器损坏是干扰因素
C.控制量为电液伺服阀的移动量 D.机械手臂的移动量不对控制的过程产生影响
17. 某校科技兴趣小组制作了人脸识别的门控系统,其基本工作过程是:安装在门框上的摄像头检测到人脸数据,并传输至树莓派主板,树莓派根据编写好的python程序语言进行分析、处理,与已存面部数据进行比较,若对比成功,则通过电机开门,否则蜂鸣器报警。下列关于该控制系统的分析正确的是( )
A.摄像头是反馈装置的组成部分
B.树莓派上的python程序语言是控制器
C.门和蜂鸣器都作为系统的被控对象
D.工作过程中存在比较,故控制方式为闭环
18. 某人脸识别门控系统的控制过程是:当摄像头检测到人脸时,Arduino 主板根据设定好的程序语言,对检测到的人脸数据分析处理,与库中存有的人脸数据对比,若对比成功,则电机转动,驱动门打开,否则发出报警声。下列分析不正确的是( )
A.Arduino 主板是控制器 B.门和报警装置都是被控对象
C.库中人脸数据是系统的输入量 D.电机是执行器
19. LEGO魔方机器人近几年深受广大青少年儿童的喜爱,它的工作原理是先用传感器采集魔方6个面上每块(1面有9块)的颜色,然后由主控制器根据特定算法计算结果,控制机械手翻转魔方,从而达到自动解魔方的效果。如果魔方的颜色不标准或者周围的光线太暗,都会对魔方机器人解魔方形成干扰。根据示意图和描述,完成以下任务:
(1)该系统的控制手段和控制方式分别属于________和________(①人工控制;②自动控制;③开环控制;④闭环控制);
(2)该控制系统的执行器和被控对象分别是________、________(①LEGO主控制器;②机械手;③魔方);
(3)该系统中的传感器应选用________(①声音传感器;②颜色传感器;③温度传感器);
(4)为了提高LEGO魔方机器人识别魔方6个面颜色的效果,设计人员针对不同的光线环境做了大量的实验,得出一系列数据,对魔方的感光敏感度进行了调整,体现系统分析的____(①整体性原则;②科学性原则;③综合性原则)。
20. 如图所示是一款智能油烟机,350mm超薄机身,采用不锈钢一体成型,拐角采用大圆角设计,直流变频无极变速电机,能自动根据烟道阻力无极变速风压及风量,强力吸排油烟。内置热水自动清洗系统,深度洗净内腔油污,动力如初,延长油烟机寿命。搭载AI手势控制系统,抬手轻挥就能开关机、调风量,告别用沾满油污的手去按键。当人忘记开启油烟机时,油烟机探头感知到灶具热量,开启油烟机排油烟工作。请根据以上资料的描述,完成以下任务:
(1)油烟机探头感知到灶具热量,开启油烟机,该系统的控制手段和方式属于____ 、 (在“A.开环控制;B.闭环控制;C.人工控制;D.自动控制”中选择合适的选项,将序号填入“ ”处);
(2)系统设计时,需要对传感器、集成电路、电机等的工作参数进行计算和反复调试,体现了系统分析的____(在“A.整体性原则;B.科学性原则;C.综合性原则”中选择合适的选项,将序号填入“ ”处);
(3)挥手净烟时系统中的传感器可选用____(在A.位移传感器;B.热敏传感器;C.压力传感器中选择合适的选项,将序号填写在“ ”处)
(4)下列连接件中,最适合油烟机与墙壁连接的是____(在下列选项中选择合适的选项,将序号填入“ ”处);
A B C D
(5)下列因素中,不属于影响本系统优化的因素的是____(在A.传感器的灵敏度;B.控制系统的精度和可靠性;C.人的炒菜习惯;D.电机的功率中选择合适的选项,将序号填写在“ ”处)
【参考答案】
1 2 3 4 5 6 7 8 9 10
D A B C C B B A C B
11 12 13 14 15 16 17 18 19 20
C D C B A D C C
(1) ② ③ , (2) ② ③, (3) ②, (4) ②
20.(1)DA (2) B (3) A (4) A (5) C
第1页/共11页
同课章节目录