浙江学考选考·技术与设计二·考点10 干扰与反馈 (Word版,含答案)
文档属性
| 名称 | 浙江学考选考·技术与设计二·考点10 干扰与反馈 (Word版,含答案) |
|
|
| 格式 | zip | ||
| 文件大小 | 2.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2023-01-05 00:00:00 | ||
图片预览
文档简介
考点10——干扰与反馈
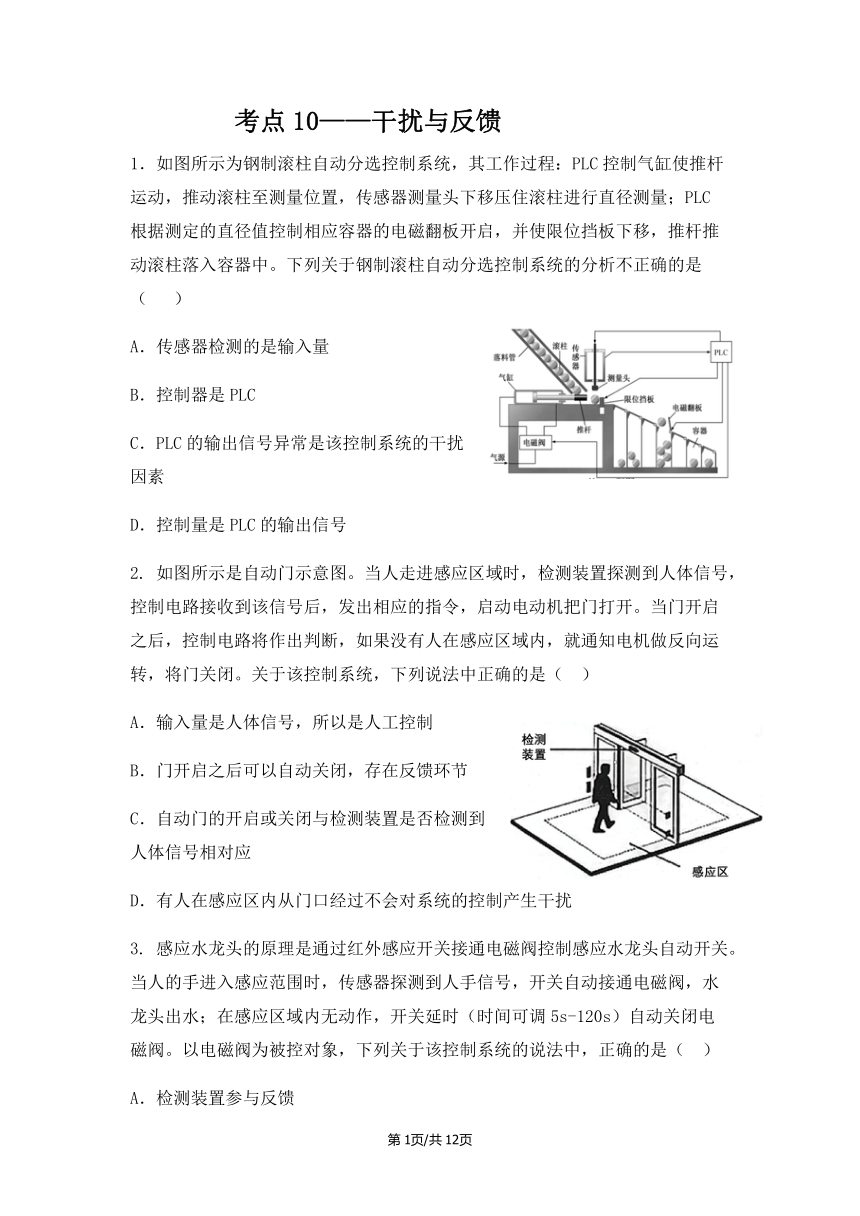
1.如图所示为钢制滚柱自动分选控制系统,其工作过程:PLC控制气缸使推杆运动,推动滚柱至测量位置,传感器测量头下移压住滚柱进行直径测量;PLC根据测定的直径值控制相应容器的电磁翻板开启,并使限位挡板下移,推杆推动滚柱落入容器中。下列关于钢制滚柱自动分选控制系统的分析不正确的是( )
A.传感器检测的是输入量
B.控制器是PLC
C.PLC的输出信号异常是该控制系统的干扰因素
D.控制量是PLC的输出信号
2. 如图所示是自动门示意图。当人走进感应区域时,检测装置探测到人体信号,控制电路接收到该信号后,发出相应的指令,启动电动机把门打开。当门开启之后,控制电路将作出判断,如果没有人在感应区域内,就通知电机做反向运转,将门关闭。关于该控制系统,下列说法中正确的是( )
A.输入量是人体信号,所以是人工控制
B.门开启之后可以自动关闭,存在反馈环节
C.自动门的开启或关闭与检测装置是否检测到人体信号相对应
D.有人在感应区内从门口经过不会对系统的控制产生干扰
3. 感应水龙头的原理是通过红外感应开关接通电磁阀控制感应水龙头自动开关。当人的手进入感应范围时,传感器探测到人手信号,开关自动接通电磁阀,水龙头出水;在感应区域内无动作,开关延时(时间可调5s-120s)自动关闭电磁阀。以电磁阀为被控对象,下列关于该控制系统的说法中,正确的是( )
A.检测装置参与反馈
B.需要检测人体信号,所以控制手段属于人工控制
C.控制量是电磁阀的开启和闭合
D.开关的异常属于干扰因素
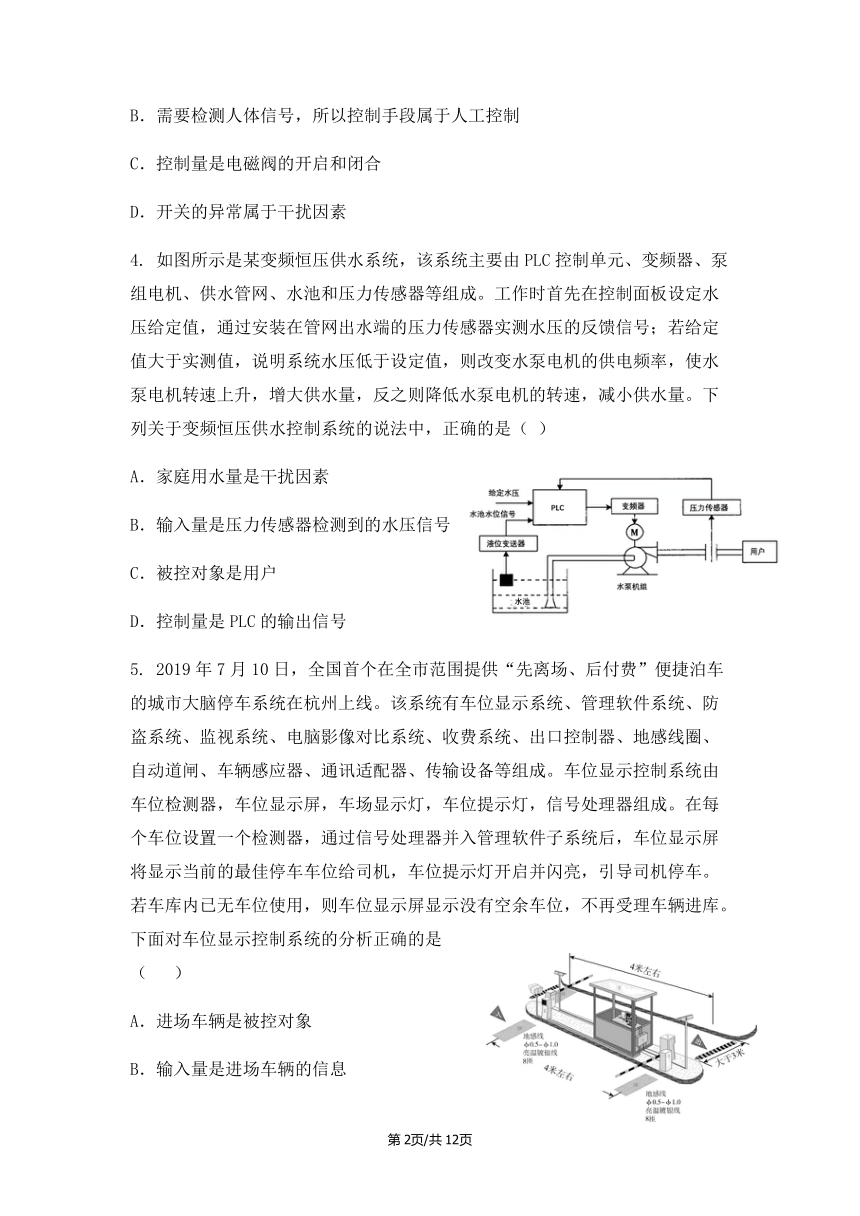
4. 如图所示是某变频恒压供水系统,该系统主要由PLC控制单元、变频器、泵组电机、供水管网、水池和压力传感器等组成。工作时首先在控制面板设定水压给定值,通过安装在管网出水端的压力传感器实测水压的反馈信号;若给定值大于实测值,说明系统水压低于设定值,则改变水泵电机的供电频率,使水泵电机转速上升,增大供水量,反之则降低水泵电机的转速,减小供水量。下列关于变频恒压供水控制系统的说法中,正确的是( )
A.家庭用水量是干扰因素
B.输入量是压力传感器检测到的水压信号
C.被控对象是用户
D.控制量是PLC的输出信号
5. 2019年7月10日,全国首个在全市范围提供“先离场、后付费”便捷泊车的城市大脑停车系统在杭州上线。该系统有车位显示系统、管理软件系统、防盗系统、监视系统、电脑影像对比系统、收费系统、出口控制器、地感线圈、自动道闸、车辆感应器、通讯适配器、传输设备等组成。车位显示控制系统由车位检测器,车位显示屏,车场显示灯,车位提示灯,信号处理器组成。在每个车位设置一个检测器,通过信号处理器并入管理软件子系统后,车位显示屏将显示当前的最佳停车车位给司机,车位提示灯开启并闪亮,引导司机停车。若车库内已无车位使用,则车位显示屏显示没有空余车位,不再受理车辆进库。下面对车位显示控制系统的分析正确的是( )
A.进场车辆是被控对象
B.输入量是进场车辆的信息
C.输出量是车位显示屏上显示的车位信息
D.该控制系统有反馈环节
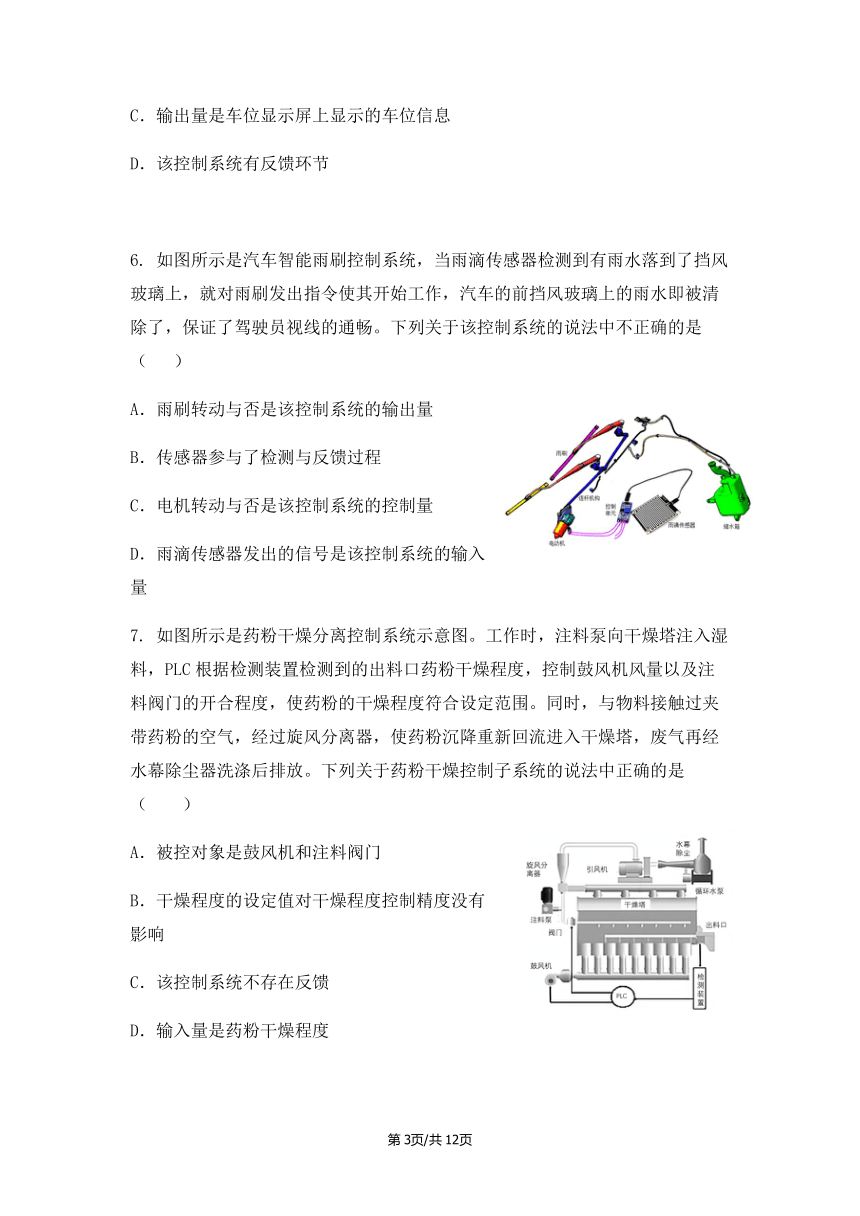
6. 如图所示是汽车智能雨刷控制系统,当雨滴传感器检测到有雨水落到了挡风玻璃上,就对雨刷发出指令使其开始工作,汽车的前挡风玻璃上的雨水即被清除了,保证了驾驶员视线的通畅。下列关于该控制系统的说法中不正确的是( )
A.雨刷转动与否是该控制系统的输出量
B.传感器参与了检测与反馈过程
C.电机转动与否是该控制系统的控制量
D.雨滴传感器发出的信号是该控制系统的输入量
7. 如图所示是药粉干燥分离控制系统示意图。工作时,注料泵向干燥塔注入湿料,PLC根据检测装置检测到的出料口药粉干燥程度,控制鼓风机风量以及注料阀门的开合程度,使药粉的干燥程度符合设定范围。同时,与物料接触过夹带药粉的空气,经过旋风分离器,使药粉沉降重新回流进入干燥塔,废气再经水幕除尘器洗涤后排放。下列关于药粉干燥控制子系统的说法中正确的是( )
A.被控对象是鼓风机和注料阀门
B.干燥程度的设定值对干燥程度控制精度没有影响
C.该控制系统不存在反馈
D.输入量是药粉干燥程度
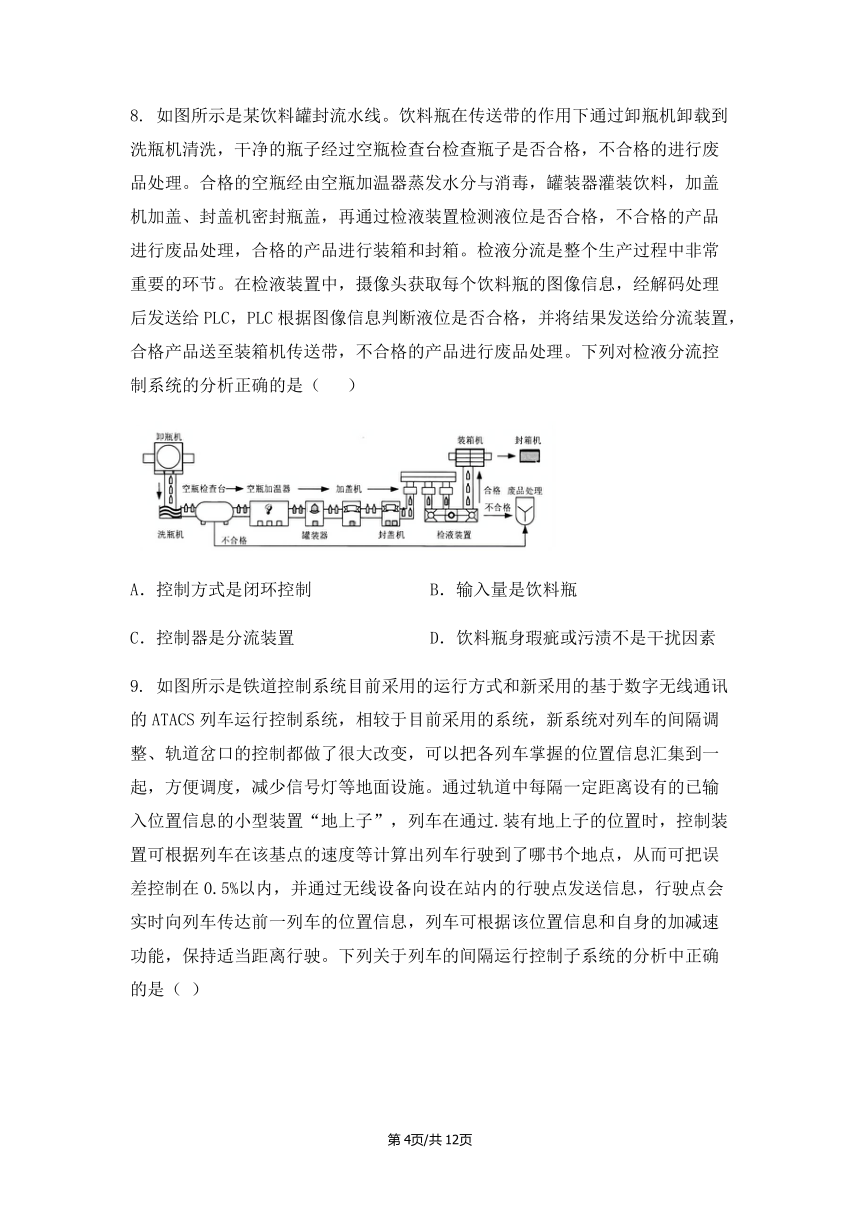
8. 如图所示是某饮料罐封流水线。饮料瓶在传送带的作用下通过卸瓶机卸载到洗瓶机清洗,干净的瓶子经过空瓶检查台检查瓶子是否合格,不合格的进行废品处理。合格的空瓶经由空瓶加温器蒸发水分与消毒,罐装器灌装饮料,加盖机加盖、封盖机密封瓶盖,再通过检液装置检测液位是否合格,不合格的产品进行废品处理,合格的产品进行装箱和封箱。检液分流是整个生产过程中非常重要的环节。在检液装置中,摄像头获取每个饮料瓶的图像信息,经解码处理后发送给PLC,PLC根据图像信息判断液位是否合格,并将结果发送给分流装置,合格产品送至装箱机传送带,不合格的产品进行废品处理。下列对检液分流控制系统的分析正确的是( )
A.控制方式是闭环控制 B.输入量是饮料瓶
C.控制器是分流装置 D.饮料瓶身瑕疵或污渍不是干扰因素
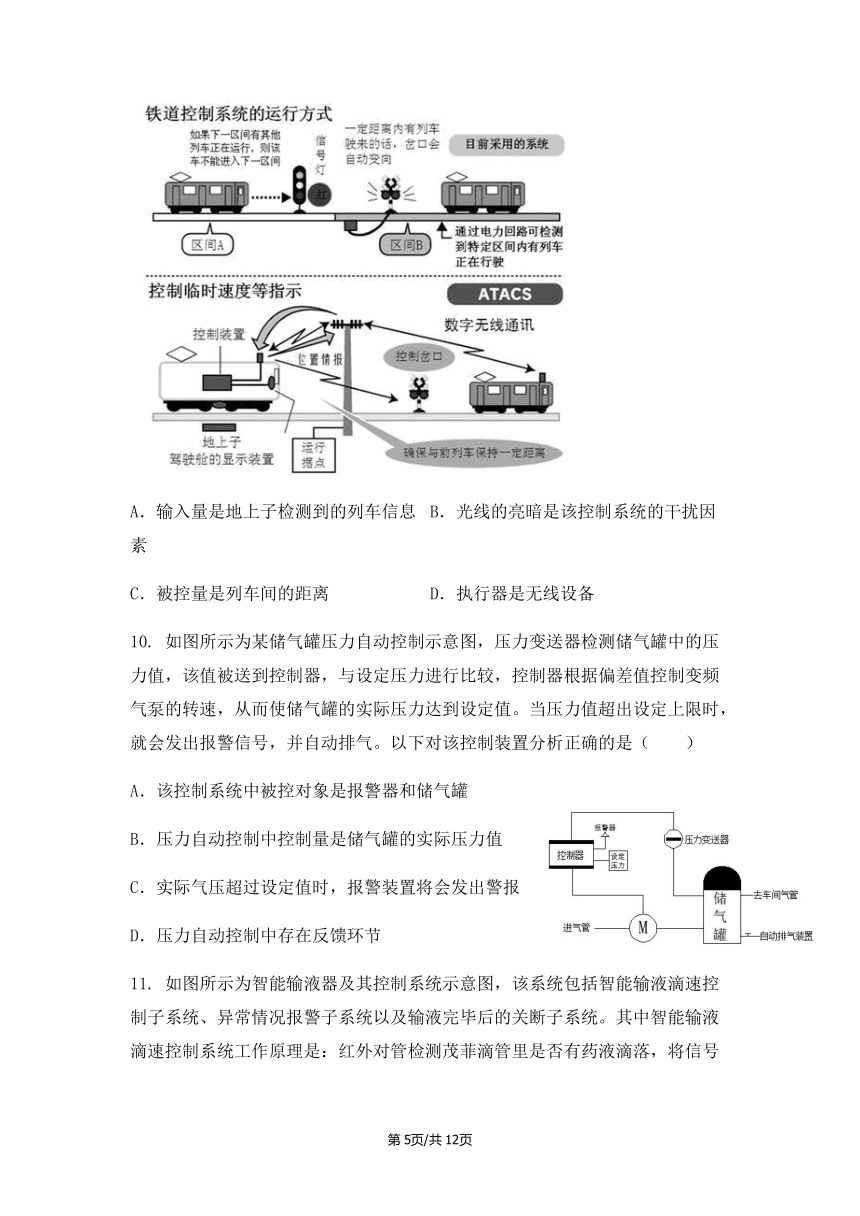
9. 如图所示是铁道控制系统目前采用的运行方式和新采用的基于数字无线通讯的ATACS列车运行控制系统,相较于目前采用的系统,新系统对列车的间隔调整、轨道岔口的控制都做了很大改变,可以把各列车掌握的位置信息汇集到一起,方便调度,减少信号灯等地面设施。通过轨道中每隔一定距离设有的已输入位置信息的小型装置“地上子”,列车在通过.装有地上子的位置时,控制装置可根据列车在该基点的速度等计算出列车行驶到了哪书个地点,从而可把误差控制在0.5%以内,并通过无线设备向设在站内的行驶点发送信息,行驶点会实时向列车传达前一列车的位置信息,列车可根据该位置信息和自身的加减速功能,保持适当距离行驶。下列关于列车的间隔运行控制子系统的分析中正确的是( )
A.输入量是地上子检测到的列车信息 B.光线的亮暗是该控制系统的干扰因素
C.被控量是列车间的距离 D.执行器是无线设备
10. 如图所示为某储气罐压力自动控制示意图,压力变送器检测储气罐中的压力值,该值被送到控制器,与设定压力进行比较,控制器根据偏差值控制变频气泵的转速,从而使储气罐的实际压力达到设定值。当压力值超出设定上限时,就会发出报警信号,并自动排气。以下对该控制装置分析正确的是( )
A.该控制系统中被控对象是报警器和储气罐
B.压力自动控制中控制量是储气罐的实际压力值
C.实际气压超过设定值时,报警装置将会发出警报
D.压力自动控制中存在反馈环节
11. 如图所示为智能输液器及其控制系统示意图,该系统包括智能输液滴速控制子系统、异常情况报警子系统以及输液完毕后的关断子系统。其中智能输液滴速控制系统工作原理是:红外对管检测茂菲滴管里是否有药液滴落,将信号送入单片机计算并与设定的滴速进行比较,控制蠕动泵改变药液的滴速,从而实现精确调速。
下列关于智能输液器的分析,正确的是( )
A.该系统的三个子系统输入信号是一致的
B.该系统的三个子系统均为开环控制系统
C.在智能输液滴速控制子系统中的蠕动泵是控制器
D.红外对管仪是智能输液滴速控制子系统的反馈装置
12. 如图所示是冰箱温度控制示意图。通过温度调节旋钮设定温度,当电冰箱压缩机停止工作后,蒸发器表面温度逐渐上升,感温包和膜盒内的感温剂气体的温度也随着上升,压强增大,使传动膜片向外伸胀,通过连杆使触点闭合,电路接通,压缩机开始制冷,使电冰箱内的温度下降。下列关于冰箱温度控制系统的分析中正确的是( )
A.执行器是压缩机
B.被控对象是蒸发器
C.检测装置是弹簧
D.调节旋钮的转动角度是干扰因素
13. 如图所示是一加热炉的恒温自动控制示意图。以下关于该控制系统说法正确的是( )
A.该控制系统的设计模拟了人的功能和行为,这种研究方法是黑箱方法
B.电热丝在控制系统中的作用是检测温度并反馈
C.调低设定温度或炉体隔热性能不好会导致炉内温度降低,都是该控制系统的干扰因素
D.在加热炉工作时,如果炉内温度大大超过了设定值,可能的原因是控制器损坏
14. 如图所示为某车载空调的制冷控制系统示意图,压缩机和膨胀阀协同工作使制冷剂循环制冷,鼓风机将车厢外的热空气吹经蒸发器使空气温度降低并送入车厢内。制冷时,温度传感器采集车厢内实际温度,微处理器根据设定温度与实测温度对压缩机、膨胀阀和鼓风机作出相应控制,使车厢内温度稳定在设定温度附近。若以车厢内的空气作为被控对象,下列关于该制冷控制系统的说法中正确的是( )
A.控制方式为开环控制
B.输入量为鼓风机从车厢外鼓入的热空气
C.控制量为压缩机排量、膨胀阀开度和鼓风机风量
D.主要干扰因素至少包括车窗的开闭、车外空气温度和道路能见度
15. 无人机灯光秀是四旋翼无人机与LED的巧妙组合。四旋翼无人机是一种自带动力的、无线电遥控或自主飞行的、能执行多种任务并能多次使用的无人驾驶飞行器。通过调节四个驱动电机的转速使无人机处于悬停控制模式时,能根据设定值在空中保持静止,组成各种美丽的图案。无人机系统主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等。其中飞控系统又称为飞行管理与控制系统,相当于无人机系统的“心脏”部分。飞控系统中IMU能感知飞行器在空中的姿态,将数据送给主控处理器MCU。主控处理器MCU将根据用户操作的指令以及IMU数据,通过飞行算法控制无刷电机使飞行器稳定运行。下列对无人机飞控系统的分析中不正确的是( )
A.控制量是用户的操作指令
B.控制器是MCU
C.该控制系统是闭环控制
D.空气中气流变化是该控制系统的干扰
16. 如图所示是一种张力控制系统。张力传感器检测卷料的实际张力经PID控制器与设定张力比较、运算后通过励磁信号自动调整磁粉制动器的励磁电流来控制卷料的张力。从控制的角度分析,下列说法中不正确的是( )
A.控制量是励磁信号
B.张力设定值对卷料的张力控制精度没有影响
C.该控制系统存在反馈
D.磁粉制动器能够直接对卷料进行控制
17. 如图所示是一款家用地暖系统的示意图,往地板下铺设的地暖盘管通入循环热水,从而加热地面,达到室内取暖的目的。该系统开启后,温度智慧控制模块会实时采集室内的温度,与设定的采暖温度进行比较,并发出设置好的计算机程序指令,通过阀门和水泵来调节地暖管道内热水的流量,将室内温度保持设定值范围内。从控制系统的角度分析,下列有关房间温度控制系统的说法中不恰当的是( )
A.该控制系统的被控对象是房间
B.采暖温度设置错误属于该控制系统的干扰因素
C.该控制系统的执行器是阀门与水泵
D.该控制系统的控制量为管道内热水的流量
18. 下列有关控制系统的说法中,不正确的是( )
A.反馈的有利于提高系统的抗干扰能力
B.引起输出量变化的因素,称之为干扰因素
C.闭环控制系统存在反馈,开环控制系统不存在反馈
D.黑箱方法是研究复杂系统的一种有效方法
19. 如图所示为数控机床,数字化机床控制系统的工作原理为:数控装置内的计算机把输入的零件信息传递给伺服系统,伺服系统向机床主轴及传动机构发出指令,机床主体则按照这些指令完成工件的加工。机床工作时,位移传感器会实时检测机床主体的位置,并将信息传递给数控装置,从而实现精准加工。下列关于该控制系统的说法正确的是( )
A.被控对象是传动机构
B.位移传感器通过反馈消除了干扰
C.被控量是机床主体的位置
D.控制量是输入的零件信息
20. 如图为某水位控制系统,通过浮球检测到水池水位下降时,放大器接受到电位器产生的电信号,电机带动减速器控制阀门的开启程度。当浮球达到设定位置时,阀门关闭。根据描述,从控制系统的角度分析,下列说法不正确的是( )
A.该控制为闭环控制的原因是浮球对控制目标进行了反馈,使被控量能稳定在一定范围内
B.放大器接受的电信号为控制量
C.当水位下降后,要提高水位恢复的速度,可以增加进水的水压
D.电动机、减速器、阀门都属于该控制的执行器
21. 如图所示是简易旋转倒立摆控制系统示意图。该控制系统可以使摆杆保持竖直倒立状态,其工作原理是:设定摆杆处于竖直倒立状态时精密电位器输出的电压值,当摆杆由于外界作用力破坏其稳定性向一侧倒下时,精密电位器的阻值变化,从而改变了输出电压,并将信息传送到单片机与设定值进行比较,单片机榆出控制信号,通过驱动电路控制电机的转速和转向,带动旋臂水平转动,使摆杆重新保持竖直倒立状态。
下列关于该控制系统分析不正确的是( )
A.控制量是旋臂的转速和转向
B.电机运行产生的振动不属于干扰因素
C.驱动电路和电机属于执行器
D.精密电位器输出的信号属于系统的反馈信号
22. 如图所示的墙体彩绘机,工作人员将要打印的图形信息输入电脑,操作系统把图片解码成打印所需要的信号送入主控制箱,主控制箱通过步进电机带动丝杆转动,使X轴导轨上下运动;小车控制箱根据接收到的主控箱信号,利用直流伺服电机使喷印小车在X轴导轨上左右运动;喷印小车配合供墨子系统在指定位置打印出特定的颜色。
以下关于喷印小车运动控制子系统的说法中不正确的是( )
A.被控对象为喷印小车
B.直流伺服电机是执行器
C.地面的平整度为干扰因素
D.X轴导轨的抖动属于干扰因素
【参考答案】
1 2 3 4 5 6 7 8 9 10 11
D C D A C B B D C B D
12 13 14 15 16 17 18 19 20 21 22
A D C A A B B C B B C
第1页/共12页
1.如图所示为钢制滚柱自动分选控制系统,其工作过程:PLC控制气缸使推杆运动,推动滚柱至测量位置,传感器测量头下移压住滚柱进行直径测量;PLC根据测定的直径值控制相应容器的电磁翻板开启,并使限位挡板下移,推杆推动滚柱落入容器中。下列关于钢制滚柱自动分选控制系统的分析不正确的是( )
A.传感器检测的是输入量
B.控制器是PLC
C.PLC的输出信号异常是该控制系统的干扰因素
D.控制量是PLC的输出信号
2. 如图所示是自动门示意图。当人走进感应区域时,检测装置探测到人体信号,控制电路接收到该信号后,发出相应的指令,启动电动机把门打开。当门开启之后,控制电路将作出判断,如果没有人在感应区域内,就通知电机做反向运转,将门关闭。关于该控制系统,下列说法中正确的是( )
A.输入量是人体信号,所以是人工控制
B.门开启之后可以自动关闭,存在反馈环节
C.自动门的开启或关闭与检测装置是否检测到人体信号相对应
D.有人在感应区内从门口经过不会对系统的控制产生干扰
3. 感应水龙头的原理是通过红外感应开关接通电磁阀控制感应水龙头自动开关。当人的手进入感应范围时,传感器探测到人手信号,开关自动接通电磁阀,水龙头出水;在感应区域内无动作,开关延时(时间可调5s-120s)自动关闭电磁阀。以电磁阀为被控对象,下列关于该控制系统的说法中,正确的是( )
A.检测装置参与反馈
B.需要检测人体信号,所以控制手段属于人工控制
C.控制量是电磁阀的开启和闭合
D.开关的异常属于干扰因素
4. 如图所示是某变频恒压供水系统,该系统主要由PLC控制单元、变频器、泵组电机、供水管网、水池和压力传感器等组成。工作时首先在控制面板设定水压给定值,通过安装在管网出水端的压力传感器实测水压的反馈信号;若给定值大于实测值,说明系统水压低于设定值,则改变水泵电机的供电频率,使水泵电机转速上升,增大供水量,反之则降低水泵电机的转速,减小供水量。下列关于变频恒压供水控制系统的说法中,正确的是( )
A.家庭用水量是干扰因素
B.输入量是压力传感器检测到的水压信号
C.被控对象是用户
D.控制量是PLC的输出信号
5. 2019年7月10日,全国首个在全市范围提供“先离场、后付费”便捷泊车的城市大脑停车系统在杭州上线。该系统有车位显示系统、管理软件系统、防盗系统、监视系统、电脑影像对比系统、收费系统、出口控制器、地感线圈、自动道闸、车辆感应器、通讯适配器、传输设备等组成。车位显示控制系统由车位检测器,车位显示屏,车场显示灯,车位提示灯,信号处理器组成。在每个车位设置一个检测器,通过信号处理器并入管理软件子系统后,车位显示屏将显示当前的最佳停车车位给司机,车位提示灯开启并闪亮,引导司机停车。若车库内已无车位使用,则车位显示屏显示没有空余车位,不再受理车辆进库。下面对车位显示控制系统的分析正确的是( )
A.进场车辆是被控对象
B.输入量是进场车辆的信息
C.输出量是车位显示屏上显示的车位信息
D.该控制系统有反馈环节
6. 如图所示是汽车智能雨刷控制系统,当雨滴传感器检测到有雨水落到了挡风玻璃上,就对雨刷发出指令使其开始工作,汽车的前挡风玻璃上的雨水即被清除了,保证了驾驶员视线的通畅。下列关于该控制系统的说法中不正确的是( )
A.雨刷转动与否是该控制系统的输出量
B.传感器参与了检测与反馈过程
C.电机转动与否是该控制系统的控制量
D.雨滴传感器发出的信号是该控制系统的输入量
7. 如图所示是药粉干燥分离控制系统示意图。工作时,注料泵向干燥塔注入湿料,PLC根据检测装置检测到的出料口药粉干燥程度,控制鼓风机风量以及注料阀门的开合程度,使药粉的干燥程度符合设定范围。同时,与物料接触过夹带药粉的空气,经过旋风分离器,使药粉沉降重新回流进入干燥塔,废气再经水幕除尘器洗涤后排放。下列关于药粉干燥控制子系统的说法中正确的是( )
A.被控对象是鼓风机和注料阀门
B.干燥程度的设定值对干燥程度控制精度没有影响
C.该控制系统不存在反馈
D.输入量是药粉干燥程度
8. 如图所示是某饮料罐封流水线。饮料瓶在传送带的作用下通过卸瓶机卸载到洗瓶机清洗,干净的瓶子经过空瓶检查台检查瓶子是否合格,不合格的进行废品处理。合格的空瓶经由空瓶加温器蒸发水分与消毒,罐装器灌装饮料,加盖机加盖、封盖机密封瓶盖,再通过检液装置检测液位是否合格,不合格的产品进行废品处理,合格的产品进行装箱和封箱。检液分流是整个生产过程中非常重要的环节。在检液装置中,摄像头获取每个饮料瓶的图像信息,经解码处理后发送给PLC,PLC根据图像信息判断液位是否合格,并将结果发送给分流装置,合格产品送至装箱机传送带,不合格的产品进行废品处理。下列对检液分流控制系统的分析正确的是( )
A.控制方式是闭环控制 B.输入量是饮料瓶
C.控制器是分流装置 D.饮料瓶身瑕疵或污渍不是干扰因素
9. 如图所示是铁道控制系统目前采用的运行方式和新采用的基于数字无线通讯的ATACS列车运行控制系统,相较于目前采用的系统,新系统对列车的间隔调整、轨道岔口的控制都做了很大改变,可以把各列车掌握的位置信息汇集到一起,方便调度,减少信号灯等地面设施。通过轨道中每隔一定距离设有的已输入位置信息的小型装置“地上子”,列车在通过.装有地上子的位置时,控制装置可根据列车在该基点的速度等计算出列车行驶到了哪书个地点,从而可把误差控制在0.5%以内,并通过无线设备向设在站内的行驶点发送信息,行驶点会实时向列车传达前一列车的位置信息,列车可根据该位置信息和自身的加减速功能,保持适当距离行驶。下列关于列车的间隔运行控制子系统的分析中正确的是( )
A.输入量是地上子检测到的列车信息 B.光线的亮暗是该控制系统的干扰因素
C.被控量是列车间的距离 D.执行器是无线设备
10. 如图所示为某储气罐压力自动控制示意图,压力变送器检测储气罐中的压力值,该值被送到控制器,与设定压力进行比较,控制器根据偏差值控制变频气泵的转速,从而使储气罐的实际压力达到设定值。当压力值超出设定上限时,就会发出报警信号,并自动排气。以下对该控制装置分析正确的是( )
A.该控制系统中被控对象是报警器和储气罐
B.压力自动控制中控制量是储气罐的实际压力值
C.实际气压超过设定值时,报警装置将会发出警报
D.压力自动控制中存在反馈环节
11. 如图所示为智能输液器及其控制系统示意图,该系统包括智能输液滴速控制子系统、异常情况报警子系统以及输液完毕后的关断子系统。其中智能输液滴速控制系统工作原理是:红外对管检测茂菲滴管里是否有药液滴落,将信号送入单片机计算并与设定的滴速进行比较,控制蠕动泵改变药液的滴速,从而实现精确调速。
下列关于智能输液器的分析,正确的是( )
A.该系统的三个子系统输入信号是一致的
B.该系统的三个子系统均为开环控制系统
C.在智能输液滴速控制子系统中的蠕动泵是控制器
D.红外对管仪是智能输液滴速控制子系统的反馈装置
12. 如图所示是冰箱温度控制示意图。通过温度调节旋钮设定温度,当电冰箱压缩机停止工作后,蒸发器表面温度逐渐上升,感温包和膜盒内的感温剂气体的温度也随着上升,压强增大,使传动膜片向外伸胀,通过连杆使触点闭合,电路接通,压缩机开始制冷,使电冰箱内的温度下降。下列关于冰箱温度控制系统的分析中正确的是( )
A.执行器是压缩机
B.被控对象是蒸发器
C.检测装置是弹簧
D.调节旋钮的转动角度是干扰因素
13. 如图所示是一加热炉的恒温自动控制示意图。以下关于该控制系统说法正确的是( )
A.该控制系统的设计模拟了人的功能和行为,这种研究方法是黑箱方法
B.电热丝在控制系统中的作用是检测温度并反馈
C.调低设定温度或炉体隔热性能不好会导致炉内温度降低,都是该控制系统的干扰因素
D.在加热炉工作时,如果炉内温度大大超过了设定值,可能的原因是控制器损坏
14. 如图所示为某车载空调的制冷控制系统示意图,压缩机和膨胀阀协同工作使制冷剂循环制冷,鼓风机将车厢外的热空气吹经蒸发器使空气温度降低并送入车厢内。制冷时,温度传感器采集车厢内实际温度,微处理器根据设定温度与实测温度对压缩机、膨胀阀和鼓风机作出相应控制,使车厢内温度稳定在设定温度附近。若以车厢内的空气作为被控对象,下列关于该制冷控制系统的说法中正确的是( )
A.控制方式为开环控制
B.输入量为鼓风机从车厢外鼓入的热空气
C.控制量为压缩机排量、膨胀阀开度和鼓风机风量
D.主要干扰因素至少包括车窗的开闭、车外空气温度和道路能见度
15. 无人机灯光秀是四旋翼无人机与LED的巧妙组合。四旋翼无人机是一种自带动力的、无线电遥控或自主飞行的、能执行多种任务并能多次使用的无人驾驶飞行器。通过调节四个驱动电机的转速使无人机处于悬停控制模式时,能根据设定值在空中保持静止,组成各种美丽的图案。无人机系统主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等。其中飞控系统又称为飞行管理与控制系统,相当于无人机系统的“心脏”部分。飞控系统中IMU能感知飞行器在空中的姿态,将数据送给主控处理器MCU。主控处理器MCU将根据用户操作的指令以及IMU数据,通过飞行算法控制无刷电机使飞行器稳定运行。下列对无人机飞控系统的分析中不正确的是( )
A.控制量是用户的操作指令
B.控制器是MCU
C.该控制系统是闭环控制
D.空气中气流变化是该控制系统的干扰
16. 如图所示是一种张力控制系统。张力传感器检测卷料的实际张力经PID控制器与设定张力比较、运算后通过励磁信号自动调整磁粉制动器的励磁电流来控制卷料的张力。从控制的角度分析,下列说法中不正确的是( )
A.控制量是励磁信号
B.张力设定值对卷料的张力控制精度没有影响
C.该控制系统存在反馈
D.磁粉制动器能够直接对卷料进行控制
17. 如图所示是一款家用地暖系统的示意图,往地板下铺设的地暖盘管通入循环热水,从而加热地面,达到室内取暖的目的。该系统开启后,温度智慧控制模块会实时采集室内的温度,与设定的采暖温度进行比较,并发出设置好的计算机程序指令,通过阀门和水泵来调节地暖管道内热水的流量,将室内温度保持设定值范围内。从控制系统的角度分析,下列有关房间温度控制系统的说法中不恰当的是( )
A.该控制系统的被控对象是房间
B.采暖温度设置错误属于该控制系统的干扰因素
C.该控制系统的执行器是阀门与水泵
D.该控制系统的控制量为管道内热水的流量
18. 下列有关控制系统的说法中,不正确的是( )
A.反馈的有利于提高系统的抗干扰能力
B.引起输出量变化的因素,称之为干扰因素
C.闭环控制系统存在反馈,开环控制系统不存在反馈
D.黑箱方法是研究复杂系统的一种有效方法
19. 如图所示为数控机床,数字化机床控制系统的工作原理为:数控装置内的计算机把输入的零件信息传递给伺服系统,伺服系统向机床主轴及传动机构发出指令,机床主体则按照这些指令完成工件的加工。机床工作时,位移传感器会实时检测机床主体的位置,并将信息传递给数控装置,从而实现精准加工。下列关于该控制系统的说法正确的是( )
A.被控对象是传动机构
B.位移传感器通过反馈消除了干扰
C.被控量是机床主体的位置
D.控制量是输入的零件信息
20. 如图为某水位控制系统,通过浮球检测到水池水位下降时,放大器接受到电位器产生的电信号,电机带动减速器控制阀门的开启程度。当浮球达到设定位置时,阀门关闭。根据描述,从控制系统的角度分析,下列说法不正确的是( )
A.该控制为闭环控制的原因是浮球对控制目标进行了反馈,使被控量能稳定在一定范围内
B.放大器接受的电信号为控制量
C.当水位下降后,要提高水位恢复的速度,可以增加进水的水压
D.电动机、减速器、阀门都属于该控制的执行器
21. 如图所示是简易旋转倒立摆控制系统示意图。该控制系统可以使摆杆保持竖直倒立状态,其工作原理是:设定摆杆处于竖直倒立状态时精密电位器输出的电压值,当摆杆由于外界作用力破坏其稳定性向一侧倒下时,精密电位器的阻值变化,从而改变了输出电压,并将信息传送到单片机与设定值进行比较,单片机榆出控制信号,通过驱动电路控制电机的转速和转向,带动旋臂水平转动,使摆杆重新保持竖直倒立状态。
下列关于该控制系统分析不正确的是( )
A.控制量是旋臂的转速和转向
B.电机运行产生的振动不属于干扰因素
C.驱动电路和电机属于执行器
D.精密电位器输出的信号属于系统的反馈信号
22. 如图所示的墙体彩绘机,工作人员将要打印的图形信息输入电脑,操作系统把图片解码成打印所需要的信号送入主控制箱,主控制箱通过步进电机带动丝杆转动,使X轴导轨上下运动;小车控制箱根据接收到的主控箱信号,利用直流伺服电机使喷印小车在X轴导轨上左右运动;喷印小车配合供墨子系统在指定位置打印出特定的颜色。
以下关于喷印小车运动控制子系统的说法中不正确的是( )
A.被控对象为喷印小车
B.直流伺服电机是执行器
C.地面的平整度为干扰因素
D.X轴导轨的抖动属于干扰因素
【参考答案】
1 2 3 4 5 6 7 8 9 10 11
D C D A C B B D C B D
12 13 14 15 16 17 18 19 20 21 22
A D C A A B B C B B C
第1页/共12页
同课章节目录