鲁科版(五四制)9.1杠杆 实验探究题专练 含答案
文档属性
| 名称 | 鲁科版(五四制)9.1杠杆 实验探究题专练 含答案 |

|
|
| 格式 | zip | ||
| 文件大小 | 392.3KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 鲁科版(五四制) | ||
| 科目 | 物理 | ||
| 更新时间 | 2023-01-17 00:00:00 | ||
图片预览


文档简介
鲁科版(五四制)9.1杠杆 实验探究题专练
1.探究杠杆平衡条件的实验装置如图所示:
(1)挂钩码前,杠杆在图甲所示的位置静止,此时杠杆处于 (选填“平衡”或“非平衡”)状态;要想从杠杆上直接读出力臂的大小,接下来的操作是 ;
(2)如图乙所示,在杠杆右边B处挂两个相同的钩码,要使杠杆仍在水平位置平衡,应在杠杆左边的A处挂 个相同的钩码;
(3)如图丙所示,若每个钩码质量均为50g,用弹簧测力计在C点向上拉杠杆,使其在水平位置平衡,弹簧测力计的示数为 N(g取10N/kg)。当弹簧测力计逐渐向右倾斜时,为使杠杆仍然在水平位置平衡,弹簧测力计的示数 (选填“变大”、“不变”或“变小”);
(4)杠杆在生活中有很多应用。现欲使如图丁所示静止的跷跷板发生转动,小女孩可采取的做法是 。
2.小明乘坐地铁时发现:乘客中有很多“低头族”,他们长时间低着头看手机.他记起物理课上老师讲过:长时间低头会引起颈部肌肉损伤.当头颅为竖直状态时,颈部肌肉的拉力为零;当头颅低下时,颈部肌肉会产生一定的拉力.为了探究“颈部肌肉的拉力与低头角度大小的关系”,小明跟课外小组的同学们制作了一个头颅模型来模拟实验.如图甲所示,把人的颈椎简化成支点O,头颅模型的质量为1kg,头颅模型在重力作用下可绕支点O转动,A点为头颅模型的重心,B点为肌肉拉力的作用点.将细线的一端固定在B点,用测力计拉着细线模拟测量肌肉的拉力,头颅模型在转动过程中,细线拉力的方向始终垂直于OB,如图乙所示,让头颅模型从竖直状态开始转动,通过实验同学们记录了低头角度θ与细线拉力F的数据,如下表:
θ/ ° 0 15 30 45 60
F/N 0 7.3 14.0 20.2 25.0
(1)若头颅质量为6kg,当低头角度为60°时,根据实验表中数据及相关物理知识推测:颈部肌肉承受的拉力为 N.
(2)请通过实验数据记录分析:人低头的角度越大,颈部肌肉的拉力 ,其主要原因是: .
(3)根据实验,请你关于“预防和延缓颈部肌肉损伤”提出一个合理化的建议: .
3.小明和同学们想通过实验,探究“杠杆平衡条件”。
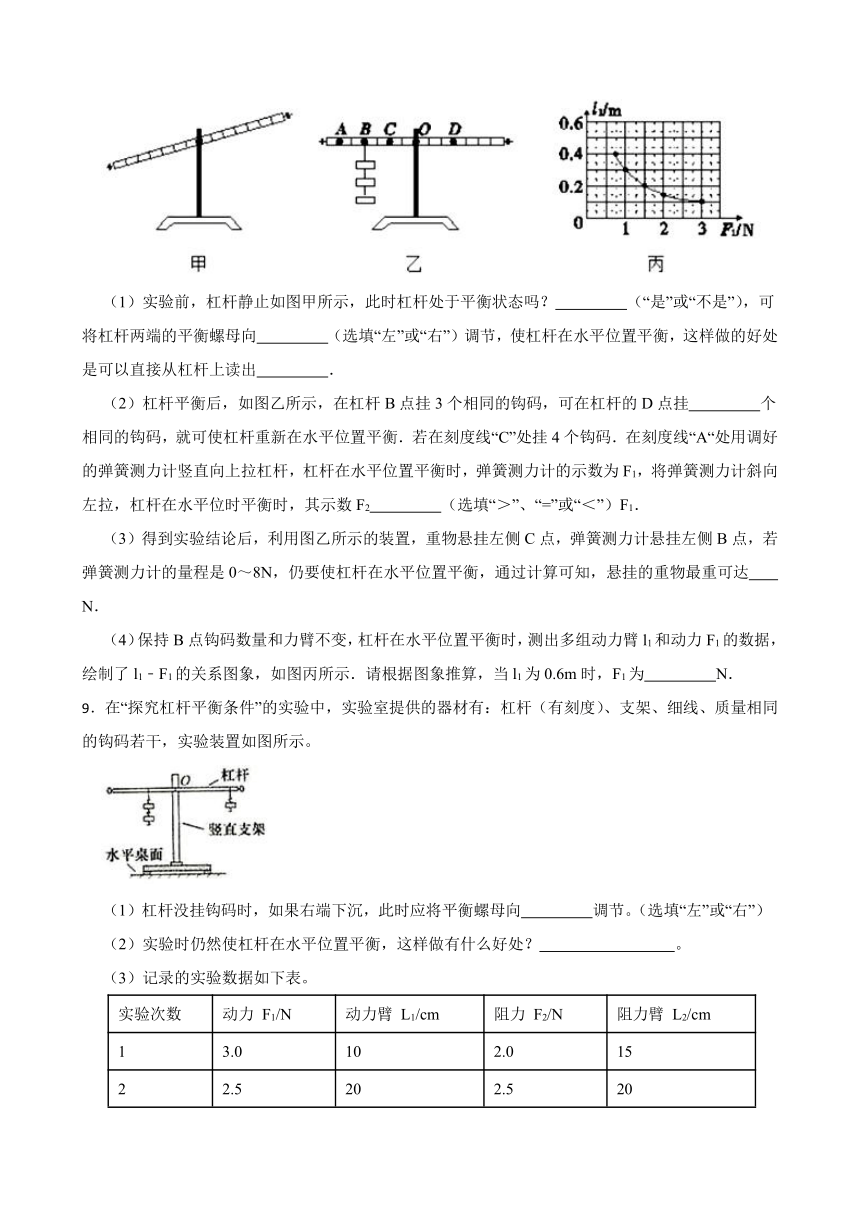
(1)实验前,小明将木尺的中间挂在支架上作为杠杆,静止如图甲所示,此时杠杆处于 (填“平衡”或“不平衡”)状态,为使杠杆在水平位置平衡,可将杠杆两端的平衡螺母向 (填“左”或“右”)调节;
(2)杠杆水平平衡后,在杠杆B点挂3个相同的钩码,如图乙所示,在杠杆的D点挂 个相同的钩码,就可使杠杆重新在水平位置平衡;
(3)小明继续利用图乙,将已经调零的弹簧测力计系在刻度线“C”处,竖直向上拉杠杆,杠杆在水平位置平衡时,记录弹簧测力计的示数为F1,小明竖直向上拉弹簧测力计的目的是 ;接着小明将系“C”处的弹簧测力计斜向右拉,当杠杆仍水平平衡时,记录测力计示数为F2,则F2 (选填“>”、“=”或“<”)F1;
(4)保持B点钩码数量和位置不变,杠杆在水平位置平衡时,测出多组动力臂l1和动力F1的数据,绘制了l1-F1的关系图像,如图丙所示,根据图像推算,当l1为0.6m时,F1为 N。
4.如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉.此时,应把杠杆两端的平衡螺母向 (左/右)调节,使杠杆在水平位置平衡,这样做的好处是便于直接 .
(2)杠杆调节平衡后,小明在杠杆上的A点处挂4个钩码,在B点处挂 个钩码后,杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件为:F1×L1=F2×L2.他这样得出的结论 (合理/不合理);原因是: .
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于水平平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是: .
5.小张同学观察教室里日光灯的悬挂结构后,想探究影响日光灯的两根悬线受到拉力大小的因素。他选用一根均匀直杆,两端用相同的测力计悬挂起来,当小球悬挂距杠杆左端距离为s时,如图所示杠杆水平平衡。将小球移至不同位置时,记录相应数据并填写在表一中。接着换用重力不同的小球多次实验,记录相应数据并填写在表二中。
表一 牛 实验序号s(厘米) (牛) (牛)125.01.0244.51.5364.02.0483.52.5
表二 牛 实验序号s(厘米) (牛) (牛)528.52.5647.53.5766.54.5885.55.5
①分析比较表一或表二中的数据及相关条件,可得出拉力 、 与 的变化关系为: ;
②分析比较实验序号2与5或3与6或4与7中的数据及相关条件,可得出拉力 与 的变化关系为: ;
③该同学进一步分析了表一或表二中相关数据,还可以得出哪两个结论 。
6.如图所示是小王“探究杠杆的平衡条件”的装置,每个钩码重为0.5N(钩码个数若干),弹簧测力计量程为。
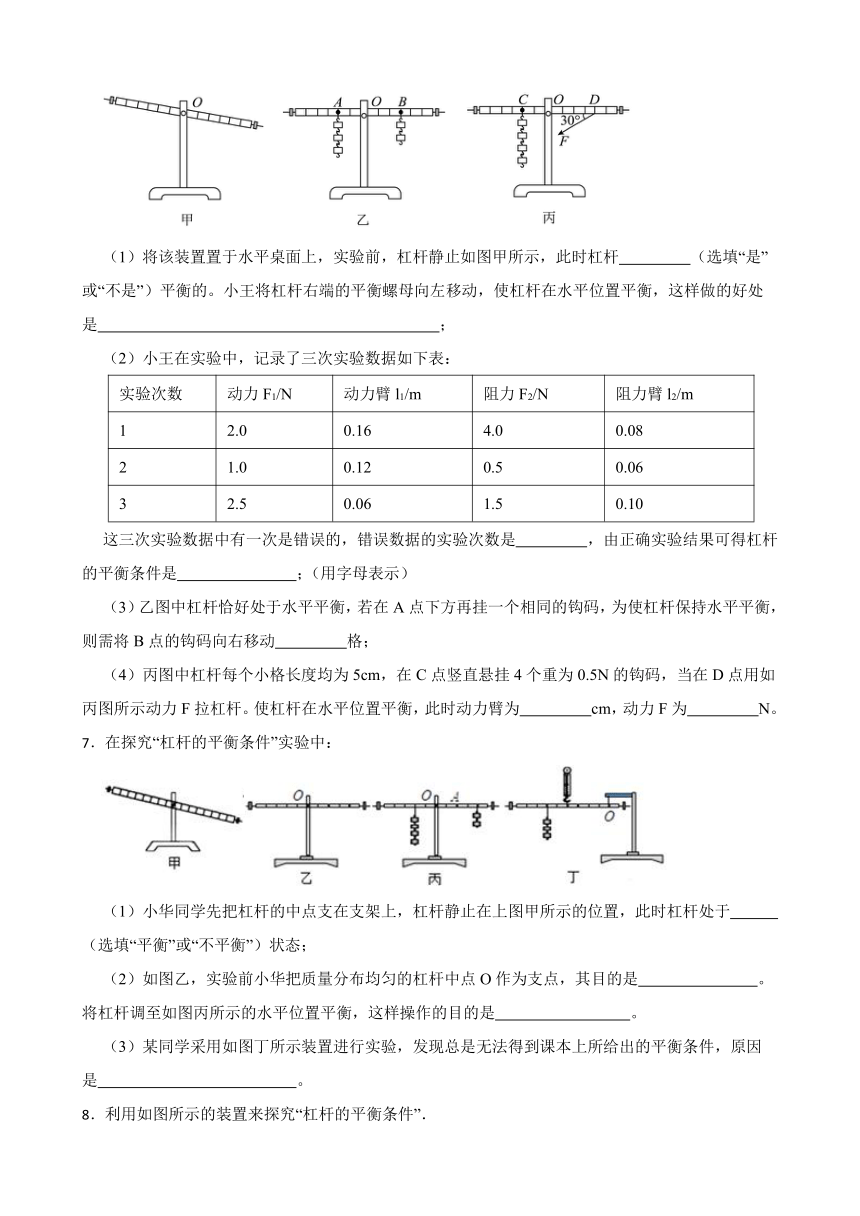
(1)将该装置置于水平桌面上,实验前,杠杆静止如图甲所示,此时杠杆 (选填“是”或“不是”)平衡的。小王将杠杆右端的平衡螺母向左移动,使杠杆在水平位置平衡,这样做的好处是 ;
(2)小王在实验中,记录了三次实验数据如下表:
实验次数 动力F1/N 动力臂l1/m 阻力F2/N 阻力臂l2/m
1 2.0 0.16 4.0 0.08
2 1.0 0.12 0.5 0.06
3 2.5 0.06 1.5 0.10
这三次实验数据中有一次是错误的,错误数据的实验次数是 ,由正确实验结果可得杠杆的平衡条件是 ;(用字母表示)
(3)乙图中杠杆恰好处于水平平衡,若在A点下方再挂一个相同的钩码,为使杠杆保持水平平衡,则需将B点的钩码向右移动 格;
(4)丙图中杠杆每个小格长度均为5cm,在C点竖直悬挂4个重为0.5N的钩码,当在D点用如丙图所示动力F拉杠杆。使杠杆在水平位置平衡,此时动力臂为 cm,动力F为 N。
7.在探究“杠杆的平衡条件”实验中:
(1)小华同学先把杠杆的中点支在支架上,杠杆静止在上图甲所示的位置,此时杠杆处于 (选填“平衡”或“不平衡”)状态;
(2)如图乙,实验前小华把质量分布均匀的杠杆中点O作为支点,其目的是 。将杠杆调至如图丙所示的水平位置平衡,这样操作的目的是 。
(3)某同学采用如图丁所示装置进行实验,发现总是无法得到课本上所给出的平衡条件,原因是 。
8.利用如图所示的装置来探究“杠杆的平衡条件”.
(1)实验前,杠杆静止如图甲所示,此时杠杆处于平衡状态吗? (“是”或“不是”),可将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡,这样做的好处是可以直接从杠杆上读出 .
(2)杠杆平衡后,如图乙所示,在杠杆B点挂3个相同的钩码,可在杠杆的D点挂 个相同的钩码,就可使杠杆重新在水平位置平衡.若在刻度线“C”处挂4个钩码.在刻度线“A“处用调好的弹簧测力计竖直向上拉杠杆,杠杆在水平位置平衡时,弹簧测力计的示数为F1,将弹簧测力计斜向左拉,杠杆在水平位时平衡时,其示数F2 (选填“>”、“=”或“<”)F1.
(3)得到实验结论后,利用图乙所示的装置,重物悬挂左侧C点,弹簧测力计悬挂左侧B点,若弹簧测力计的量程是0~8N,仍要使杠杆在水平位置平衡,通过计算可知,悬挂的重物最重可达 N.
(4)保持B点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂l1和动力F1的数据,绘制了l1﹣F1的关系图象,如图丙所示.请根据图象推算,当l1为0.6m时,F1为 N.
9.在“探究杠杆平衡条件”的实验中,实验室提供的器材有:杠杆(有刻度)、支架、细线、质量相同的钩码若干,实验装置如图所示。
(1)杠杆没挂钩码时,如果右端下沉,此时应将平衡螺母向 调节。(选填“左”或“右”)
(2)实验时仍然使杠杆在水平位置平衡,这样做有什么好处? 。
(3)记录的实验数据如下表。
实验次数 动力 F1/N 动力臂 L1/cm 阻力 F2/N 阻力臂 L2/cm
1 3.0 10 2.0 15
2 2.5 20 2.5 20
3 1.0 30 1.0 30
根据表中的信息,得出了 的结论。
这个结论 普遍性(选填“具有”或“不具有”),原因是 。
(4)如果实验室还能提供一个弹簧测力计和一个刻度尺,也可以采用新方法完成该实验,即在杠杆的一端挂上钩码,在杠杆的另一端用弹簧测力计向下拉。与在杠杆两端都挂钩码相比较,请分析说明新方法的两点好处。
a. ; b. 。
10.探究杠杆的平衡条件。
(1)如图甲所示,杠杆两端的螺母的作用是 。
(2)小亮用图甲所示装置,进行实验并收集了下表中的数据,分析数据可知杠杆的平衡条件是: .
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1 0.5 0.2 1.0 0.1
2 1.0 0.15 1.5 0.1
3 3.0 0.1 2.0 0.15
(3)小亮又用图乙所示装置进行实验,请在图中画出拉力F的力臂 ;
弹簧测力计的读数应是 N。(一个钩码重0.5N)
(4)如图丙所示,小慧实验时在一平衡杠杆的两端放上不同数量的相同硬币,杠杆仍在水平位置平衡。她用刻度尺测出L1和L2,则2L1 3L2(选填“>”、“<”或“=”)。
(5)探究了杠杆的平衡条件后,小红对天平上游码的质量进行了计算,她用刻度尺测出L1和L2(如图丁所示),则游码的质量为 g。
11.探究“杠杆的平衡条件”实验中:
(1)实验前出现图甲所示情况,应将杠杆两端的螺母向 调(填“左”或“右”),使杠杆在水平位置平衡,这样做的目的是 。
(2)实验过程中出现了图乙所示的情况,为了使杠杆在水平位置平衡,这时应将左边的钩码向 (填“左”或“右”)移动 格。
(3)实验中,要改变力和力臂的数值,得到多组实验数据,这样做的目的是
12.在“探究杠杆的平衡条件”实验中。
⑴应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡;这样做是为了便于测量 ,如发现杠杆左端偏高,则可将右端的平衡螺母向 调节,或将左端的平衡螺母向 调节。如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中;
实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 1.5 10 1
2 1 20 10
3 1 20 1.5 10
⑵请将表格中的实验数据补充完整。
⑶小明的第3次实验存在错误,其错误是 ;
⑷在探究杠杆平衡条件的实验中,多次改变力和力臂的大小主要是为了( )
A.减小摩擦
B.使每组数据更准确
C.多次测量取平均值减小误差
D.获取多组实验数据归纳出物理规律
13.在“研究杠杆平衡条件”的实验中,杠杆刻度均匀,每个钩码的质量都相等.
(1)实验开始时,杠杆如图甲所示处于静止状态.为使杠杆在水平位置平衡,应将两端的平衡螺母向 移动(选填“左”或“右”).
(2)调节杠杆水平平衡后,在杠杆上挂了如图乙所示2组钩码.此时,杠杆在水平位置是否平衡: (选填“平衡”或“不平衡”).
(3)用弹簧测力计和钩码配合使用,也可以研究杠杆平衡条件.如图丙所示,若每个钩码的质量是50g,则可用量程为0~5N的弹簧测力计在 处(选填“A”、“B”或“C”)竖直向上拉杠杆,使其在水平位置平衡,获取实验数据.
14.小丽在“探究杠杆的平衡条件”的实验中,使用了如图所示的装置.
(1)小丽将杠杆放在支架上后,呈如图所示的状态,则她应该将平衡螺母向 (填“左”或“右”)调节,使杠杆在 位置平衡.这样做的目的是 .
(2)调节好杠杆后,小丽将两个重均为0.5N的钩码挂在杠杆a处,又将弹簧测力计挂在杠杆b处的细线上,竖直向 (填“上”或“下”)拉弹簧测力计,能使杠杆再次平衡.操作时,小丽发现弹簧测力计读数太小,不能准确读数,请你帮她找出一种改进的方法: .
(3)小丽通过实验获得了三组数据如下表.表中第3次实验中的阻力臂L2应为 cm;
实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 2 6 3 4
2 3 5 5 3
3 4 4 8
分析上表中数据,得出杠杆的平衡条件是 .
15.某实验小组进行简单机械类探究实验:
(1)探究“杠杆平衡条件”实验前,为方便测量力臂,应将杠杆调节到水平位置平衡,图1中,杠杆的平衡螺母B应向 调节(选填“左”或“右”;
(2)图2中,要使杠杆在水平位置平衡,需在C点悬挂 个同样钩码;
(3)某同学进行正确的实验操作后,能不能根据(2)问中的一组数据得出结沦? (选填“能”或“不能”),理由 ;
(4)探究“动滑轮的待点”的实验结果表明:使用动滑轮可以 (选填“省力”或“省距离”),但不能改变力的方向;
(5)生活和工作中使用的滑轮如:A.国旗杆顶部的滑轮;B.电动起重机吊钩上的滑轮,属于动滑轮的是 (选填“A“或“B”).
16.小梅在“探究杠杆平衡条件”的实验中,进行了如下操作:
(1)将杠杆悬挂在支点O上,如图甲所示,要使杠杆在水平位置平衡,需将杠杆左端的平衡螺母向 调节;(填“左”或“右”)
(2)实验时使杠杆在水平位置平衡其目的是为了便于直接读出 的大小;
(3)调节平衡后,在杠杆左侧A点挂3个钩码,每个钩码重1N,如图乙所示,为使杠杆在水平位置重新平衡,需在杠杆右侧B点挂 个同样的钩码。当杠杆重新平衡后若在不增减钩码 的情况下,若将 A B 两处钩码同时外移一格,将出现的现象是 ;
A.杠杆依然平衡 B.杠杆左端下降 C.杠杆右端下降
(4)若撤掉杠杆B点的钩码,改用弹簧测力计在C位置竖直向上拉,使杠杆保持水平平衡。则弹簧测力计的示数F是 N;
(5)若此时将弹簧测力计改为向左上方斜拉(如图乙所示沿虚线方向),要使杠杆仍然保持水平平衡,拉力F的大小将 。(选填“变大”、“变小”或“不变”)
17.某同学利用如图所示的实验装置探究杠杆的平衡条件,实验中每个钩码的质量均为50g。
(1)在没有挂钩码时杠杆静止在如图甲所示的位置,此时杠杆处于 (“平衡”或“不平衡”)状态;为使杠杆在水平位置平衡,可只将杠杆左端螺母向 (填“左”或“右”)边旋一些;
(2)杠杆调好后,某同学进行实验时在A挂3个钩码(如图乙所示),为使杠杆保持水平位置平衡,他可以在B点悬挂 个钩码;也可以在C点用弹簧测力计施加竖直向上的拉力F1(如图丙所示),或者在C点用弹簧测力计施加斜向上的拉力F2(如图丁所示),则F1 F2(填“大于”、“等于”或“小于”);
(3)请画出图丙中钩码对杠杆作用力的示意图。
答案
1.(1)平衡;平衡螺母向左端移动 (2)3 (3)0.75;变大
(4)左侧小女孩向靠近支点方向移动或右侧小女孩向远离支点方向移动
2.(1)150
(2)越大;低头角度越大,重力G的力臂L越长,重力G和肌肉拉力F的力臂OB不变,根据杠杆平衡条件G×L=F×LOB,因此肌肉的拉力F越大
(3)不要长时间低头
3.(1)平衡;右 (2)4 (3)方便力臂的测量;> (4)0.5
4.(1)左;测量力臂
(2)6;不合理;实验次数太少,结论不具有普遍性
(3)杠杆自身重力对实验结论有影响
5.s;随着距离s的增大, 减小, 增大;在小球距离杠杆左端的距离一定时,小球的重力G越大,拉力 、 就越大;结论一,在小球重力G一定的条件下, + 等于定值。结论二,杠杆的重力 ,即杠杆的重力为1N。
6.(1)是;消除杠杆自重对实验的影响,便于测量力臂 (2)2;
(3)1 (4)10;2
7.(1)平衡
(2)消除杠杆自重对实验的影响;便于测量力臂
(3)杠杆自重对实验的影响
8.(1)是;右;力臂 (2)4;> (3)16 (4)0.5
9.(1)左 (2)测量力臂方便
(3)不具有;第 2、3 两次实验都是等臂的,相当于一次实验。所以少一次实验
(4)测力计的拉力可以连续变化,很容易使杠杆平衡;可以改变拉力方向,力臂不与杠杆重合,使结论更具有普遍性
10.(1)调节杠杆在水平位置平衡
(2)动力×动力臂=阻力×阻力臂
(3);2
(4)>
(5)
11.(1)右;消除杠杆自身重力对杠杆平衡的影响,便于力臂的测量
(2)右;2
(3)使实验结论具有普遍性
12.水平;力臂;左;左;15;2;拉力F1与杠杆没有垂直,动力臂不是20cm;D
13.(1)左 (2)不平衡 (3)B
14.(1)左;水平;便于测量力臂
(2)上;增加钩码数或将弹簧测力计向右移
(3)2;动力×动力臂=阻力×阻力臂(或F1×L1=F2×L2)
15.(1)右 (2)3 (3)不能;实验次数太少,结论具有偶然性 (4)省力 (5)B
16.(1)左 (2)力臂 (3)2;B (4)1.5 (5)变大
17.(1)平衡;右 (2)6;小于
(3)
1.探究杠杆平衡条件的实验装置如图所示:
(1)挂钩码前,杠杆在图甲所示的位置静止,此时杠杆处于 (选填“平衡”或“非平衡”)状态;要想从杠杆上直接读出力臂的大小,接下来的操作是 ;
(2)如图乙所示,在杠杆右边B处挂两个相同的钩码,要使杠杆仍在水平位置平衡,应在杠杆左边的A处挂 个相同的钩码;
(3)如图丙所示,若每个钩码质量均为50g,用弹簧测力计在C点向上拉杠杆,使其在水平位置平衡,弹簧测力计的示数为 N(g取10N/kg)。当弹簧测力计逐渐向右倾斜时,为使杠杆仍然在水平位置平衡,弹簧测力计的示数 (选填“变大”、“不变”或“变小”);
(4)杠杆在生活中有很多应用。现欲使如图丁所示静止的跷跷板发生转动,小女孩可采取的做法是 。
2.小明乘坐地铁时发现:乘客中有很多“低头族”,他们长时间低着头看手机.他记起物理课上老师讲过:长时间低头会引起颈部肌肉损伤.当头颅为竖直状态时,颈部肌肉的拉力为零;当头颅低下时,颈部肌肉会产生一定的拉力.为了探究“颈部肌肉的拉力与低头角度大小的关系”,小明跟课外小组的同学们制作了一个头颅模型来模拟实验.如图甲所示,把人的颈椎简化成支点O,头颅模型的质量为1kg,头颅模型在重力作用下可绕支点O转动,A点为头颅模型的重心,B点为肌肉拉力的作用点.将细线的一端固定在B点,用测力计拉着细线模拟测量肌肉的拉力,头颅模型在转动过程中,细线拉力的方向始终垂直于OB,如图乙所示,让头颅模型从竖直状态开始转动,通过实验同学们记录了低头角度θ与细线拉力F的数据,如下表:
θ/ ° 0 15 30 45 60
F/N 0 7.3 14.0 20.2 25.0
(1)若头颅质量为6kg,当低头角度为60°时,根据实验表中数据及相关物理知识推测:颈部肌肉承受的拉力为 N.
(2)请通过实验数据记录分析:人低头的角度越大,颈部肌肉的拉力 ,其主要原因是: .
(3)根据实验,请你关于“预防和延缓颈部肌肉损伤”提出一个合理化的建议: .
3.小明和同学们想通过实验,探究“杠杆平衡条件”。
(1)实验前,小明将木尺的中间挂在支架上作为杠杆,静止如图甲所示,此时杠杆处于 (填“平衡”或“不平衡”)状态,为使杠杆在水平位置平衡,可将杠杆两端的平衡螺母向 (填“左”或“右”)调节;
(2)杠杆水平平衡后,在杠杆B点挂3个相同的钩码,如图乙所示,在杠杆的D点挂 个相同的钩码,就可使杠杆重新在水平位置平衡;
(3)小明继续利用图乙,将已经调零的弹簧测力计系在刻度线“C”处,竖直向上拉杠杆,杠杆在水平位置平衡时,记录弹簧测力计的示数为F1,小明竖直向上拉弹簧测力计的目的是 ;接着小明将系“C”处的弹簧测力计斜向右拉,当杠杆仍水平平衡时,记录测力计示数为F2,则F2 (选填“>”、“=”或“<”)F1;
(4)保持B点钩码数量和位置不变,杠杆在水平位置平衡时,测出多组动力臂l1和动力F1的数据,绘制了l1-F1的关系图像,如图丙所示,根据图像推算,当l1为0.6m时,F1为 N。
4.如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉.此时,应把杠杆两端的平衡螺母向 (左/右)调节,使杠杆在水平位置平衡,这样做的好处是便于直接 .
(2)杠杆调节平衡后,小明在杠杆上的A点处挂4个钩码,在B点处挂 个钩码后,杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件为:F1×L1=F2×L2.他这样得出的结论 (合理/不合理);原因是: .
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于水平平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是: .
5.小张同学观察教室里日光灯的悬挂结构后,想探究影响日光灯的两根悬线受到拉力大小的因素。他选用一根均匀直杆,两端用相同的测力计悬挂起来,当小球悬挂距杠杆左端距离为s时,如图所示杠杆水平平衡。将小球移至不同位置时,记录相应数据并填写在表一中。接着换用重力不同的小球多次实验,记录相应数据并填写在表二中。
表一 牛 实验序号s(厘米) (牛) (牛)125.01.0244.51.5364.02.0483.52.5
表二 牛 实验序号s(厘米) (牛) (牛)528.52.5647.53.5766.54.5885.55.5
①分析比较表一或表二中的数据及相关条件,可得出拉力 、 与 的变化关系为: ;
②分析比较实验序号2与5或3与6或4与7中的数据及相关条件,可得出拉力 与 的变化关系为: ;
③该同学进一步分析了表一或表二中相关数据,还可以得出哪两个结论 。
6.如图所示是小王“探究杠杆的平衡条件”的装置,每个钩码重为0.5N(钩码个数若干),弹簧测力计量程为。
(1)将该装置置于水平桌面上,实验前,杠杆静止如图甲所示,此时杠杆 (选填“是”或“不是”)平衡的。小王将杠杆右端的平衡螺母向左移动,使杠杆在水平位置平衡,这样做的好处是 ;
(2)小王在实验中,记录了三次实验数据如下表:
实验次数 动力F1/N 动力臂l1/m 阻力F2/N 阻力臂l2/m
1 2.0 0.16 4.0 0.08
2 1.0 0.12 0.5 0.06
3 2.5 0.06 1.5 0.10
这三次实验数据中有一次是错误的,错误数据的实验次数是 ,由正确实验结果可得杠杆的平衡条件是 ;(用字母表示)
(3)乙图中杠杆恰好处于水平平衡,若在A点下方再挂一个相同的钩码,为使杠杆保持水平平衡,则需将B点的钩码向右移动 格;
(4)丙图中杠杆每个小格长度均为5cm,在C点竖直悬挂4个重为0.5N的钩码,当在D点用如丙图所示动力F拉杠杆。使杠杆在水平位置平衡,此时动力臂为 cm,动力F为 N。
7.在探究“杠杆的平衡条件”实验中:
(1)小华同学先把杠杆的中点支在支架上,杠杆静止在上图甲所示的位置,此时杠杆处于 (选填“平衡”或“不平衡”)状态;
(2)如图乙,实验前小华把质量分布均匀的杠杆中点O作为支点,其目的是 。将杠杆调至如图丙所示的水平位置平衡,这样操作的目的是 。
(3)某同学采用如图丁所示装置进行实验,发现总是无法得到课本上所给出的平衡条件,原因是 。
8.利用如图所示的装置来探究“杠杆的平衡条件”.
(1)实验前,杠杆静止如图甲所示,此时杠杆处于平衡状态吗? (“是”或“不是”),可将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡,这样做的好处是可以直接从杠杆上读出 .
(2)杠杆平衡后,如图乙所示,在杠杆B点挂3个相同的钩码,可在杠杆的D点挂 个相同的钩码,就可使杠杆重新在水平位置平衡.若在刻度线“C”处挂4个钩码.在刻度线“A“处用调好的弹簧测力计竖直向上拉杠杆,杠杆在水平位置平衡时,弹簧测力计的示数为F1,将弹簧测力计斜向左拉,杠杆在水平位时平衡时,其示数F2 (选填“>”、“=”或“<”)F1.
(3)得到实验结论后,利用图乙所示的装置,重物悬挂左侧C点,弹簧测力计悬挂左侧B点,若弹簧测力计的量程是0~8N,仍要使杠杆在水平位置平衡,通过计算可知,悬挂的重物最重可达 N.
(4)保持B点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂l1和动力F1的数据,绘制了l1﹣F1的关系图象,如图丙所示.请根据图象推算,当l1为0.6m时,F1为 N.
9.在“探究杠杆平衡条件”的实验中,实验室提供的器材有:杠杆(有刻度)、支架、细线、质量相同的钩码若干,实验装置如图所示。
(1)杠杆没挂钩码时,如果右端下沉,此时应将平衡螺母向 调节。(选填“左”或“右”)
(2)实验时仍然使杠杆在水平位置平衡,这样做有什么好处? 。
(3)记录的实验数据如下表。
实验次数 动力 F1/N 动力臂 L1/cm 阻力 F2/N 阻力臂 L2/cm
1 3.0 10 2.0 15
2 2.5 20 2.5 20
3 1.0 30 1.0 30
根据表中的信息,得出了 的结论。
这个结论 普遍性(选填“具有”或“不具有”),原因是 。
(4)如果实验室还能提供一个弹簧测力计和一个刻度尺,也可以采用新方法完成该实验,即在杠杆的一端挂上钩码,在杠杆的另一端用弹簧测力计向下拉。与在杠杆两端都挂钩码相比较,请分析说明新方法的两点好处。
a. ; b. 。
10.探究杠杆的平衡条件。
(1)如图甲所示,杠杆两端的螺母的作用是 。
(2)小亮用图甲所示装置,进行实验并收集了下表中的数据,分析数据可知杠杆的平衡条件是: .
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1 0.5 0.2 1.0 0.1
2 1.0 0.15 1.5 0.1
3 3.0 0.1 2.0 0.15
(3)小亮又用图乙所示装置进行实验,请在图中画出拉力F的力臂 ;
弹簧测力计的读数应是 N。(一个钩码重0.5N)
(4)如图丙所示,小慧实验时在一平衡杠杆的两端放上不同数量的相同硬币,杠杆仍在水平位置平衡。她用刻度尺测出L1和L2,则2L1 3L2(选填“>”、“<”或“=”)。
(5)探究了杠杆的平衡条件后,小红对天平上游码的质量进行了计算,她用刻度尺测出L1和L2(如图丁所示),则游码的质量为 g。
11.探究“杠杆的平衡条件”实验中:
(1)实验前出现图甲所示情况,应将杠杆两端的螺母向 调(填“左”或“右”),使杠杆在水平位置平衡,这样做的目的是 。
(2)实验过程中出现了图乙所示的情况,为了使杠杆在水平位置平衡,这时应将左边的钩码向 (填“左”或“右”)移动 格。
(3)实验中,要改变力和力臂的数值,得到多组实验数据,这样做的目的是
12.在“探究杠杆的平衡条件”实验中。
⑴应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡;这样做是为了便于测量 ,如发现杠杆左端偏高,则可将右端的平衡螺母向 调节,或将左端的平衡螺母向 调节。如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中;
实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 1.5 10 1
2 1 20 10
3 1 20 1.5 10
⑵请将表格中的实验数据补充完整。
⑶小明的第3次实验存在错误,其错误是 ;
⑷在探究杠杆平衡条件的实验中,多次改变力和力臂的大小主要是为了( )
A.减小摩擦
B.使每组数据更准确
C.多次测量取平均值减小误差
D.获取多组实验数据归纳出物理规律
13.在“研究杠杆平衡条件”的实验中,杠杆刻度均匀,每个钩码的质量都相等.
(1)实验开始时,杠杆如图甲所示处于静止状态.为使杠杆在水平位置平衡,应将两端的平衡螺母向 移动(选填“左”或“右”).
(2)调节杠杆水平平衡后,在杠杆上挂了如图乙所示2组钩码.此时,杠杆在水平位置是否平衡: (选填“平衡”或“不平衡”).
(3)用弹簧测力计和钩码配合使用,也可以研究杠杆平衡条件.如图丙所示,若每个钩码的质量是50g,则可用量程为0~5N的弹簧测力计在 处(选填“A”、“B”或“C”)竖直向上拉杠杆,使其在水平位置平衡,获取实验数据.
14.小丽在“探究杠杆的平衡条件”的实验中,使用了如图所示的装置.
(1)小丽将杠杆放在支架上后,呈如图所示的状态,则她应该将平衡螺母向 (填“左”或“右”)调节,使杠杆在 位置平衡.这样做的目的是 .
(2)调节好杠杆后,小丽将两个重均为0.5N的钩码挂在杠杆a处,又将弹簧测力计挂在杠杆b处的细线上,竖直向 (填“上”或“下”)拉弹簧测力计,能使杠杆再次平衡.操作时,小丽发现弹簧测力计读数太小,不能准确读数,请你帮她找出一种改进的方法: .
(3)小丽通过实验获得了三组数据如下表.表中第3次实验中的阻力臂L2应为 cm;
实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 2 6 3 4
2 3 5 5 3
3 4 4 8
分析上表中数据,得出杠杆的平衡条件是 .
15.某实验小组进行简单机械类探究实验:
(1)探究“杠杆平衡条件”实验前,为方便测量力臂,应将杠杆调节到水平位置平衡,图1中,杠杆的平衡螺母B应向 调节(选填“左”或“右”;
(2)图2中,要使杠杆在水平位置平衡,需在C点悬挂 个同样钩码;
(3)某同学进行正确的实验操作后,能不能根据(2)问中的一组数据得出结沦? (选填“能”或“不能”),理由 ;
(4)探究“动滑轮的待点”的实验结果表明:使用动滑轮可以 (选填“省力”或“省距离”),但不能改变力的方向;
(5)生活和工作中使用的滑轮如:A.国旗杆顶部的滑轮;B.电动起重机吊钩上的滑轮,属于动滑轮的是 (选填“A“或“B”).
16.小梅在“探究杠杆平衡条件”的实验中,进行了如下操作:
(1)将杠杆悬挂在支点O上,如图甲所示,要使杠杆在水平位置平衡,需将杠杆左端的平衡螺母向 调节;(填“左”或“右”)
(2)实验时使杠杆在水平位置平衡其目的是为了便于直接读出 的大小;
(3)调节平衡后,在杠杆左侧A点挂3个钩码,每个钩码重1N,如图乙所示,为使杠杆在水平位置重新平衡,需在杠杆右侧B点挂 个同样的钩码。当杠杆重新平衡后若在不增减钩码 的情况下,若将 A B 两处钩码同时外移一格,将出现的现象是 ;
A.杠杆依然平衡 B.杠杆左端下降 C.杠杆右端下降
(4)若撤掉杠杆B点的钩码,改用弹簧测力计在C位置竖直向上拉,使杠杆保持水平平衡。则弹簧测力计的示数F是 N;
(5)若此时将弹簧测力计改为向左上方斜拉(如图乙所示沿虚线方向),要使杠杆仍然保持水平平衡,拉力F的大小将 。(选填“变大”、“变小”或“不变”)
17.某同学利用如图所示的实验装置探究杠杆的平衡条件,实验中每个钩码的质量均为50g。
(1)在没有挂钩码时杠杆静止在如图甲所示的位置,此时杠杆处于 (“平衡”或“不平衡”)状态;为使杠杆在水平位置平衡,可只将杠杆左端螺母向 (填“左”或“右”)边旋一些;
(2)杠杆调好后,某同学进行实验时在A挂3个钩码(如图乙所示),为使杠杆保持水平位置平衡,他可以在B点悬挂 个钩码;也可以在C点用弹簧测力计施加竖直向上的拉力F1(如图丙所示),或者在C点用弹簧测力计施加斜向上的拉力F2(如图丁所示),则F1 F2(填“大于”、“等于”或“小于”);
(3)请画出图丙中钩码对杠杆作用力的示意图。
答案
1.(1)平衡;平衡螺母向左端移动 (2)3 (3)0.75;变大
(4)左侧小女孩向靠近支点方向移动或右侧小女孩向远离支点方向移动
2.(1)150
(2)越大;低头角度越大,重力G的力臂L越长,重力G和肌肉拉力F的力臂OB不变,根据杠杆平衡条件G×L=F×LOB,因此肌肉的拉力F越大
(3)不要长时间低头
3.(1)平衡;右 (2)4 (3)方便力臂的测量;> (4)0.5
4.(1)左;测量力臂
(2)6;不合理;实验次数太少,结论不具有普遍性
(3)杠杆自身重力对实验结论有影响
5.s;随着距离s的增大, 减小, 增大;在小球距离杠杆左端的距离一定时,小球的重力G越大,拉力 、 就越大;结论一,在小球重力G一定的条件下, + 等于定值。结论二,杠杆的重力 ,即杠杆的重力为1N。
6.(1)是;消除杠杆自重对实验的影响,便于测量力臂 (2)2;
(3)1 (4)10;2
7.(1)平衡
(2)消除杠杆自重对实验的影响;便于测量力臂
(3)杠杆自重对实验的影响
8.(1)是;右;力臂 (2)4;> (3)16 (4)0.5
9.(1)左 (2)测量力臂方便
(3)不具有;第 2、3 两次实验都是等臂的,相当于一次实验。所以少一次实验
(4)测力计的拉力可以连续变化,很容易使杠杆平衡;可以改变拉力方向,力臂不与杠杆重合,使结论更具有普遍性
10.(1)调节杠杆在水平位置平衡
(2)动力×动力臂=阻力×阻力臂
(3);2
(4)>
(5)
11.(1)右;消除杠杆自身重力对杠杆平衡的影响,便于力臂的测量
(2)右;2
(3)使实验结论具有普遍性
12.水平;力臂;左;左;15;2;拉力F1与杠杆没有垂直,动力臂不是20cm;D
13.(1)左 (2)不平衡 (3)B
14.(1)左;水平;便于测量力臂
(2)上;增加钩码数或将弹簧测力计向右移
(3)2;动力×动力臂=阻力×阻力臂(或F1×L1=F2×L2)
15.(1)右 (2)3 (3)不能;实验次数太少,结论具有偶然性 (4)省力 (5)B
16.(1)左 (2)力臂 (3)2;B (4)1.5 (5)变大
17.(1)平衡;右 (2)6;小于
(3)