第9课 沿轨迹行走的机器人 课件(共9张PPT)- 五年级下册信息技术 粤教版(B版)
文档属性
| 名称 | 第9课 沿轨迹行走的机器人 课件(共9张PPT)- 五年级下册信息技术 粤教版(B版) |
|
|
| 格式 | zip | ||
| 文件大小 | 2.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2023-02-05 00:00:00 | ||
图片预览
文档简介
(共9张PPT)
广东教育出版社 信息技术 五年级 上册
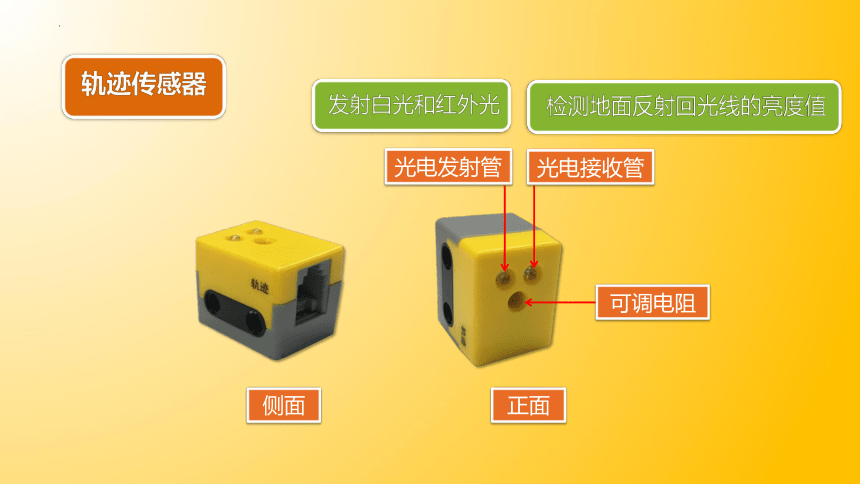
可调电阻
光电发射管
轨迹传感器
侧面
正面
光电接收管
发射白光和红外光
检测地面反射回光线的亮度值
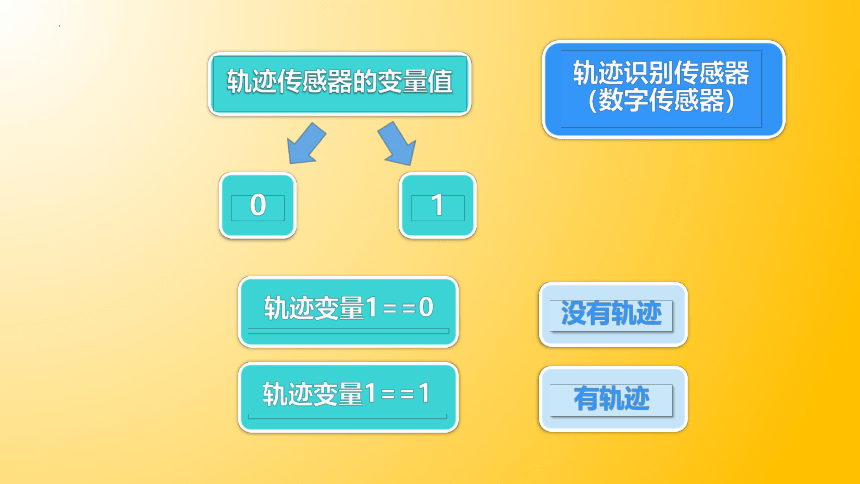
轨迹传感器的变量值
0
轨迹变量1==0
轨迹识别传感器(数字传感器)
轨迹变量1==1
没有轨迹
1
有轨迹
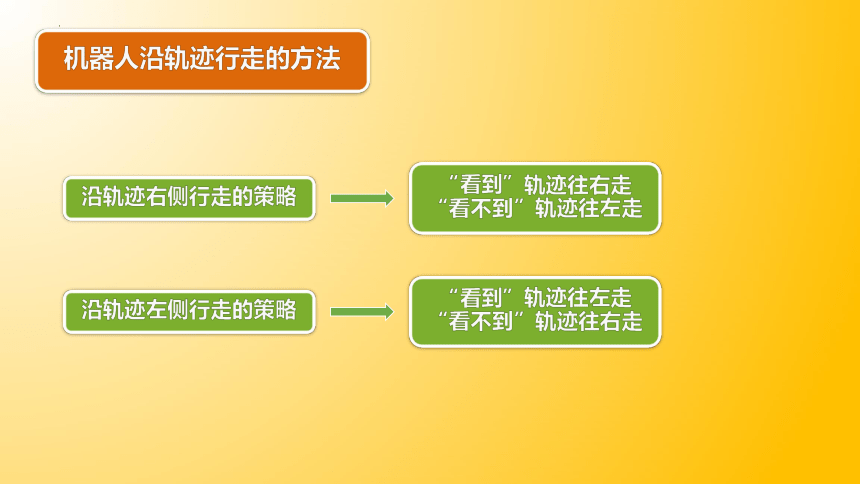
机器人沿轨迹行走的方法
沿轨迹右侧行走的策略
“看到”轨迹往右走“看不到”轨迹往左走
沿轨迹左侧行走的策略
“看到”轨迹往左走“看不到”轨迹往右走
调试轨迹传感器
轨迹传感器
灵敏度增大
轻轻地
可调电阻
注意事项
1、避免明亮光线直射或斜射,(尽量使用室内光源)
2、轨迹传感器距离地面应在8~10mm之间
3、调节可调电阻时,动作一定要轻
4、实体机器人接线要与程序中设置的端口一致
搭建沿轨迹行走的机器人
动手搭建 一展身手
拓展任务
制作一个到终点就停下来的轨迹小车
88
ROBOTO诺宝
轨迹
0v0
Raddae
9
摩
0
0p)
广东教育出版社 信息技术 五年级 上册
可调电阻
光电发射管
轨迹传感器
侧面
正面
光电接收管
发射白光和红外光
检测地面反射回光线的亮度值
轨迹传感器的变量值
0
轨迹变量1==0
轨迹识别传感器(数字传感器)
轨迹变量1==1
没有轨迹
1
有轨迹
机器人沿轨迹行走的方法
沿轨迹右侧行走的策略
“看到”轨迹往右走“看不到”轨迹往左走
沿轨迹左侧行走的策略
“看到”轨迹往左走“看不到”轨迹往右走
调试轨迹传感器
轨迹传感器
灵敏度增大
轻轻地
可调电阻
注意事项
1、避免明亮光线直射或斜射,(尽量使用室内光源)
2、轨迹传感器距离地面应在8~10mm之间
3、调节可调电阻时,动作一定要轻
4、实体机器人接线要与程序中设置的端口一致
搭建沿轨迹行走的机器人
动手搭建 一展身手
拓展任务
制作一个到终点就停下来的轨迹小车
88
ROBOTO诺宝
轨迹
0v0
Raddae
9
摩
0
0p)
同课章节目录