人教版(2019)必修第一册 3.5 共点力的平衡 教学设计
文档属性
| 名称 | 人教版(2019)必修第一册 3.5 共点力的平衡 教学设计 |
|
|
| 格式 | doc | ||
| 文件大小 | 38.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2023-02-19 13:56:38 | ||
图片预览
文档简介
《共点力的平衡》教学设计
1.课标解析
“共点力的平衡”是人教版必修1的内容,是高中物理培养运动与相互作用观念的里程碑。普通高中物理课程标准中“相互作用与运动定律”的内容标准写道:“通过实验,了解力的合成与分解,知道矢量和标量。能用共点力的平衡条件分析生产生活中的问题”。“通过实验,了解力的合成与分解”是指了解合力与分力的概念以及力的合成与分解的平行四边形定则。学生能用平行四边形定则把两个已知力合成为一个合力或者把一个已知力分解为两个分力就可以了,不要求用它来求解现实情境中复杂的受力问题。现实情境中的受力计算,应该是学习共点力平衡时解决的问题。把矢量的含义放在这里提出,旨在突出矢量加减的法则,让学生认识到物理量的加减是否应用平行四边形定则是判别矢量的重要标志。
2.教材分析
共点力平衡是在初中二力平衡基础上得出的,是二力平衡的进一步拓展和延伸,它是特殊条件(合力为0)下的特殊运动(加速度为0)。一般物体的平衡问题相对复杂,高中阶段只限于讨论共点力作用下物体的平衡条件,并用共点力平衡的条件分析日常生活中的实际问题,而且要在分析过程中,培养学生科学规范的探究能力、认真严谨的思维习惯、实事求是的科学态度,以促进学生运动与相互作用观念的形成,为后续学习“物体所受合力不为0时,运动状态如何变化”奠定基础。
3.学情分析
学生在初中已经学过平衡状态和二力平衡的条件,平衡状态为“保持静止或匀速直线运动”,二力平衡的条件表述为“作用在一个物体上的两个力大小相等、方向相反,并且在同一条直线上”。但初中不涉及共点力的概念,也不知道共点力平衡的条件,更不会用共点力平衡的条件分析解决生产生活中的实际问题。而运用共点力平衡的条件解决物体受力问题的思路是一个在高中物理中具有普遍意义的重要思路,普遍适用于力、电和热等问题的分析。
4.教学目标
(1)知道什么是共点力。
(2)在二力平衡的基础上,经过实验探究和科学推理,得出共点力平衡的条件为:物体所受合力为零。
(3)会用共点力平衡的条件,分析生活中的实际问题,体会物理学知识的实际应用价值。
5.教学重难点
(1)教学重点:共点力平衡的条件及应用。
(2)教学难点:匀速直线运动时共点力平衡的条件。
6.教学媒体与实验器材
多媒体投影系统,手机(希沃授课助手),视频、图片若干;支架、滑轮、细线、细棒、PVC板;每组学生实验包括:木板、白纸、图钉、细线、平板测力计3只、尺子一套;自制传送装置、白板、平板测力计3只;10g钩码一盒等。
7.教学方法
演示法,讲授法,谈话法,讨论法,实验法,练习法。
8.教学过程
一、悟空逃不出掌心,引出平衡概念
视频1:悟空逃不出掌心,被压五指山下。
师:大家记不记得《西游记》中的这个场景?当年悟空没能逃出佛祖的掌心,被压在了五指山下。是不是因为当时逃跑的方向不对?我们让他再来逃逃看。
情境1:先放背景,再放支架,如右图所示。
师:这是如来佛祖的手掌,现在的悟空被困掌心位置。如果悟空向下跑,能不能逃出掌心?
全班:不会。(引发思考,学生不一定要回答)
师:(下拉悟空,松手)回到了掌心位置。
师:向上跑,能不能逃出来?
师:(向上拉,松手)又回到了掌心。
师:再往两边逃逃看。(向左拉,松手)往左?(向右拉,松手)往右?
师:无论它往哪个方向跑,始终逃不出掌心位置。请同学们根据所学知识,思考一下悟空为何逃不出掌心?
请2~3位学生谈谈自己的看法,只要能涉及“静止”“力”“平衡”等概念即可)
师:刚才两位同学提到了平衡状态和受力平衡,这就是今天我们主要研究的问题。
二、探究
1.共点力与非共点力
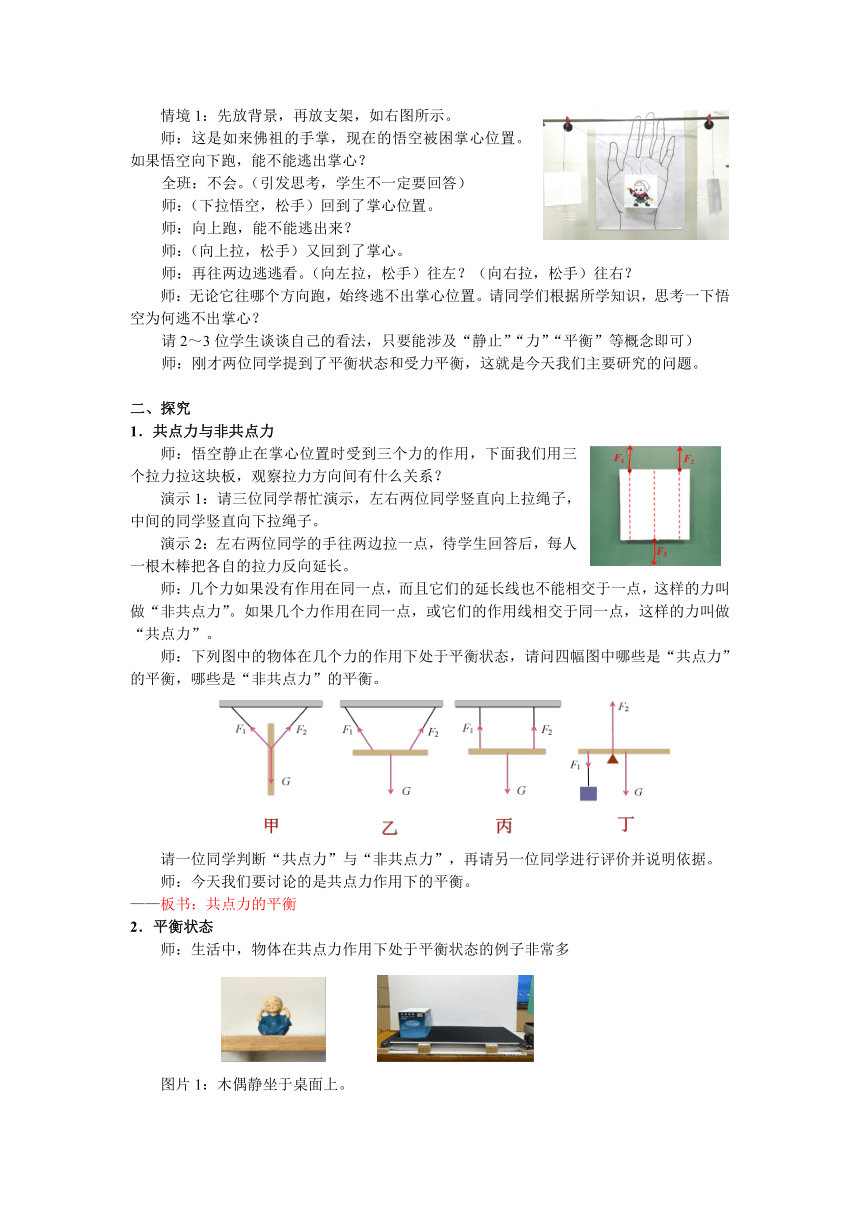
师:悟空静止在掌心位置时受到三个力的作用,下面我们用三个拉力拉这块板,观察拉力方向间有什么关系?
演示1:请三位同学帮忙演示,左右两位同学竖直向上拉绳子,中间的同学竖直向下拉绳子。
演示2:左右两位同学的手往两边拉一点,待学生回答后,每人一根木棒把各自的拉力反向延长。
师:几个力如果没有作用在同一点,而且它们的延长线也不能相交于一点,这样的力叫做“非共点力”。如果几个力作用在同一点,或它们的作用线相交于同一点,这样的力叫做“共点力”。
师:下列图中的物体在几个力的作用下处于平衡状态,请问四幅图中哪些是“共点力”的平衡,哪些是“非共点力”的平衡。
请一位同学判断“共点力”与“非共点力”,再请另一位同学进行评价并说明依据。
师:今天我们要讨论的是共点力作用下的平衡。
——板书:共点力的平衡
2.平衡状态
师:生活中,物体在共点力作用下处于平衡状态的例子非常多
图片1:木偶静坐于桌面上。
师:木偶静止在桌面上,处于平衡状态,。
视频1:盒子随传送带做匀速直线运动。
师:盒子随传送带做匀速直线运动,也处于平衡状态。
结论1:物体的平衡状态包括静止和匀速直线运动。
——板书:状态:静止、匀速直线运动
3.平衡条件——20min
(1)二力平衡
师:要使物体处于平衡状态,它受到的力需要满足什么条件?这个木偶静止在桌面上时受到哪些力的作用?你认为这两个共点力大小、方向满足什么条件?它们的合力为多大?
结论2:二力平衡,合力为零。
(2)三力平衡
师:倘若在结点位置再加一个力,使其在三个共点力的作用下保持静止,你认为这三个力的合力为多大?
师:接下来大家相互讨论一下,设计一个方案,来求这三个共点力的合力。
师:根据这位同学的方案,在具体操作过程中,还需要关注以下问题:如何获得三个力的大小?如何确定三个力的方向?以及如何保证这三个力作用在同一点上?
方案设计较为困难,经过讨论后请一位学生回答,再由其他同学进行补充。
师:接下来大家按刚才两位同学的方案,结合屏幕中所示的器材,通过实验探究静止时三个共点力的合力。
学生实验1:利用桌上的器材,分组探究静止时三个共点力的合力。
巡视、指导学生实验,拍摄记录学生在实验过程中存在的问题及做得比较好的几组实验成果,并用希沃软件将拍得的照片上传到电脑屏幕,并请几个学生进行评价、分析。
师:在误差允许的范围内,F1与F2的合力与F3大小相等、方向相反,合力为零,说明这三个共点力的合力为零。
结论3:三力平衡,合力为零。
(3)匀速直线运动状态下的平衡
师:刚才我们研究了静止时共点力的合力,下面我们来看一下匀速直线运动时共点力的合力。
演示3:将箱子置于传送装置上,启动开关。
师:这是一台传送装置,打开开关,物体在传送带上匀速运动,转动旋钮,可以调节速度。
师:通过刚才的实验我们知道静止时这三个共点力的合力为零,那你认为匀速直线运动时它们的合力为多大?但在运动时,无法像刚才那样作图求合力,请你设计一个方案,求匀速直线运动时三个共点力的合力。大家先相互讨论一下。
引导学生回答匀速直线运动时三只弹簧测力计拉力的大小、方向以及结点位置与静止时相同。
用红笔标出拉力的大小和方向,用蓝色标签标注结点位置。用希沃软件将手机与电脑屏幕同屏,与学生一起读出静止时三个共点力的大小,并观察拉力方向及结点位置。
打开开关,使传送装置匀速运动,学生观察读数大小、拉力方向及结点位置是否发生变化。转动旋钮,使白板随传送带以更大速度匀速运行,再次观察读数大小、拉力方向及结点位置是否发生变化。
结论4:匀速直线运动时,三个共点力的合力为零。
(4)四力、多力平衡
师:如果物体在四个共点力的作用下保持平衡状态,合力为多大?该怎么求?
引导学生回答,通过力的合成,把四力平衡的问题转化为三力平衡,再转化为二力平衡,求得合力为零。
师:倘若N个力作用在同一点,使物体保持平衡状态,求合力的方法一样不一样?
结论5:物体在多力作用下处于平衡状态时,合力为零。
结论6:物体在共点力作用下保持平衡时,无论是静止还是匀速直线运动,不管受到多少个力,最终的合力为零。
结论7:共点力的平衡条件是合力为零。
——板书:条件:F合=0
三、应用——10min
师:下面我们再来研究悟空被困掌心的问题。
问题1:已知这三块板的质量均为30g,则悟空受到的两个拉力F1、F2之间的夹角α为多大?
摆放背景。引导学生作图分析。
问题2:有一盒质量均为10g的钩码,试着在某块板或某几块板下面挂上若干钩码,使这个120度角变为直角。
请学生亲自操作,并用尺子进行验证。
问题3:如果左边挂2个,右边挂1个,同时将右边的滑轮下移,使拉力F2沿水平方向,则拉力F1与竖直方向间的夹角β为多大?
一位同学到黑板上作图,其他同学在自己白纸上作图分析。
四、总结
请一位学生结合板书总结一下今天这堂课的主要内容。
9.板书设计
10.作业布置
课后练习
静止
状态
共点力的平衡
匀速直线运动
条件:F合=0
1.课标解析
“共点力的平衡”是人教版必修1的内容,是高中物理培养运动与相互作用观念的里程碑。普通高中物理课程标准中“相互作用与运动定律”的内容标准写道:“通过实验,了解力的合成与分解,知道矢量和标量。能用共点力的平衡条件分析生产生活中的问题”。“通过实验,了解力的合成与分解”是指了解合力与分力的概念以及力的合成与分解的平行四边形定则。学生能用平行四边形定则把两个已知力合成为一个合力或者把一个已知力分解为两个分力就可以了,不要求用它来求解现实情境中复杂的受力问题。现实情境中的受力计算,应该是学习共点力平衡时解决的问题。把矢量的含义放在这里提出,旨在突出矢量加减的法则,让学生认识到物理量的加减是否应用平行四边形定则是判别矢量的重要标志。
2.教材分析
共点力平衡是在初中二力平衡基础上得出的,是二力平衡的进一步拓展和延伸,它是特殊条件(合力为0)下的特殊运动(加速度为0)。一般物体的平衡问题相对复杂,高中阶段只限于讨论共点力作用下物体的平衡条件,并用共点力平衡的条件分析日常生活中的实际问题,而且要在分析过程中,培养学生科学规范的探究能力、认真严谨的思维习惯、实事求是的科学态度,以促进学生运动与相互作用观念的形成,为后续学习“物体所受合力不为0时,运动状态如何变化”奠定基础。
3.学情分析
学生在初中已经学过平衡状态和二力平衡的条件,平衡状态为“保持静止或匀速直线运动”,二力平衡的条件表述为“作用在一个物体上的两个力大小相等、方向相反,并且在同一条直线上”。但初中不涉及共点力的概念,也不知道共点力平衡的条件,更不会用共点力平衡的条件分析解决生产生活中的实际问题。而运用共点力平衡的条件解决物体受力问题的思路是一个在高中物理中具有普遍意义的重要思路,普遍适用于力、电和热等问题的分析。
4.教学目标
(1)知道什么是共点力。
(2)在二力平衡的基础上,经过实验探究和科学推理,得出共点力平衡的条件为:物体所受合力为零。
(3)会用共点力平衡的条件,分析生活中的实际问题,体会物理学知识的实际应用价值。
5.教学重难点
(1)教学重点:共点力平衡的条件及应用。
(2)教学难点:匀速直线运动时共点力平衡的条件。
6.教学媒体与实验器材
多媒体投影系统,手机(希沃授课助手),视频、图片若干;支架、滑轮、细线、细棒、PVC板;每组学生实验包括:木板、白纸、图钉、细线、平板测力计3只、尺子一套;自制传送装置、白板、平板测力计3只;10g钩码一盒等。
7.教学方法
演示法,讲授法,谈话法,讨论法,实验法,练习法。
8.教学过程
一、悟空逃不出掌心,引出平衡概念
视频1:悟空逃不出掌心,被压五指山下。
师:大家记不记得《西游记》中的这个场景?当年悟空没能逃出佛祖的掌心,被压在了五指山下。是不是因为当时逃跑的方向不对?我们让他再来逃逃看。
情境1:先放背景,再放支架,如右图所示。
师:这是如来佛祖的手掌,现在的悟空被困掌心位置。如果悟空向下跑,能不能逃出掌心?
全班:不会。(引发思考,学生不一定要回答)
师:(下拉悟空,松手)回到了掌心位置。
师:向上跑,能不能逃出来?
师:(向上拉,松手)又回到了掌心。
师:再往两边逃逃看。(向左拉,松手)往左?(向右拉,松手)往右?
师:无论它往哪个方向跑,始终逃不出掌心位置。请同学们根据所学知识,思考一下悟空为何逃不出掌心?
请2~3位学生谈谈自己的看法,只要能涉及“静止”“力”“平衡”等概念即可)
师:刚才两位同学提到了平衡状态和受力平衡,这就是今天我们主要研究的问题。
二、探究
1.共点力与非共点力
师:悟空静止在掌心位置时受到三个力的作用,下面我们用三个拉力拉这块板,观察拉力方向间有什么关系?
演示1:请三位同学帮忙演示,左右两位同学竖直向上拉绳子,中间的同学竖直向下拉绳子。
演示2:左右两位同学的手往两边拉一点,待学生回答后,每人一根木棒把各自的拉力反向延长。
师:几个力如果没有作用在同一点,而且它们的延长线也不能相交于一点,这样的力叫做“非共点力”。如果几个力作用在同一点,或它们的作用线相交于同一点,这样的力叫做“共点力”。
师:下列图中的物体在几个力的作用下处于平衡状态,请问四幅图中哪些是“共点力”的平衡,哪些是“非共点力”的平衡。
请一位同学判断“共点力”与“非共点力”,再请另一位同学进行评价并说明依据。
师:今天我们要讨论的是共点力作用下的平衡。
——板书:共点力的平衡
2.平衡状态
师:生活中,物体在共点力作用下处于平衡状态的例子非常多
图片1:木偶静坐于桌面上。
师:木偶静止在桌面上,处于平衡状态,。
视频1:盒子随传送带做匀速直线运动。
师:盒子随传送带做匀速直线运动,也处于平衡状态。
结论1:物体的平衡状态包括静止和匀速直线运动。
——板书:状态:静止、匀速直线运动
3.平衡条件——20min
(1)二力平衡
师:要使物体处于平衡状态,它受到的力需要满足什么条件?这个木偶静止在桌面上时受到哪些力的作用?你认为这两个共点力大小、方向满足什么条件?它们的合力为多大?
结论2:二力平衡,合力为零。
(2)三力平衡
师:倘若在结点位置再加一个力,使其在三个共点力的作用下保持静止,你认为这三个力的合力为多大?
师:接下来大家相互讨论一下,设计一个方案,来求这三个共点力的合力。
师:根据这位同学的方案,在具体操作过程中,还需要关注以下问题:如何获得三个力的大小?如何确定三个力的方向?以及如何保证这三个力作用在同一点上?
方案设计较为困难,经过讨论后请一位学生回答,再由其他同学进行补充。
师:接下来大家按刚才两位同学的方案,结合屏幕中所示的器材,通过实验探究静止时三个共点力的合力。
学生实验1:利用桌上的器材,分组探究静止时三个共点力的合力。
巡视、指导学生实验,拍摄记录学生在实验过程中存在的问题及做得比较好的几组实验成果,并用希沃软件将拍得的照片上传到电脑屏幕,并请几个学生进行评价、分析。
师:在误差允许的范围内,F1与F2的合力与F3大小相等、方向相反,合力为零,说明这三个共点力的合力为零。
结论3:三力平衡,合力为零。
(3)匀速直线运动状态下的平衡
师:刚才我们研究了静止时共点力的合力,下面我们来看一下匀速直线运动时共点力的合力。
演示3:将箱子置于传送装置上,启动开关。
师:这是一台传送装置,打开开关,物体在传送带上匀速运动,转动旋钮,可以调节速度。
师:通过刚才的实验我们知道静止时这三个共点力的合力为零,那你认为匀速直线运动时它们的合力为多大?但在运动时,无法像刚才那样作图求合力,请你设计一个方案,求匀速直线运动时三个共点力的合力。大家先相互讨论一下。
引导学生回答匀速直线运动时三只弹簧测力计拉力的大小、方向以及结点位置与静止时相同。
用红笔标出拉力的大小和方向,用蓝色标签标注结点位置。用希沃软件将手机与电脑屏幕同屏,与学生一起读出静止时三个共点力的大小,并观察拉力方向及结点位置。
打开开关,使传送装置匀速运动,学生观察读数大小、拉力方向及结点位置是否发生变化。转动旋钮,使白板随传送带以更大速度匀速运行,再次观察读数大小、拉力方向及结点位置是否发生变化。
结论4:匀速直线运动时,三个共点力的合力为零。
(4)四力、多力平衡
师:如果物体在四个共点力的作用下保持平衡状态,合力为多大?该怎么求?
引导学生回答,通过力的合成,把四力平衡的问题转化为三力平衡,再转化为二力平衡,求得合力为零。
师:倘若N个力作用在同一点,使物体保持平衡状态,求合力的方法一样不一样?
结论5:物体在多力作用下处于平衡状态时,合力为零。
结论6:物体在共点力作用下保持平衡时,无论是静止还是匀速直线运动,不管受到多少个力,最终的合力为零。
结论7:共点力的平衡条件是合力为零。
——板书:条件:F合=0
三、应用——10min
师:下面我们再来研究悟空被困掌心的问题。
问题1:已知这三块板的质量均为30g,则悟空受到的两个拉力F1、F2之间的夹角α为多大?
摆放背景。引导学生作图分析。
问题2:有一盒质量均为10g的钩码,试着在某块板或某几块板下面挂上若干钩码,使这个120度角变为直角。
请学生亲自操作,并用尺子进行验证。
问题3:如果左边挂2个,右边挂1个,同时将右边的滑轮下移,使拉力F2沿水平方向,则拉力F1与竖直方向间的夹角β为多大?
一位同学到黑板上作图,其他同学在自己白纸上作图分析。
四、总结
请一位学生结合板书总结一下今天这堂课的主要内容。
9.板书设计
10.作业布置
课后练习
静止
状态
共点力的平衡
匀速直线运动
条件:F合=0