系统、控制专题复习课件(共18张PPT)-2023届高三通用技术二轮复习
文档属性
| 名称 | 系统、控制专题复习课件(共18张PPT)-2023届高三通用技术二轮复习 |  | |
| 格式 | pptx | ||
| 文件大小 | 1.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2023-04-11 08:33:05 | ||
图片预览
文档简介
(共18张PPT)
系统、控制专题
2023.4.??
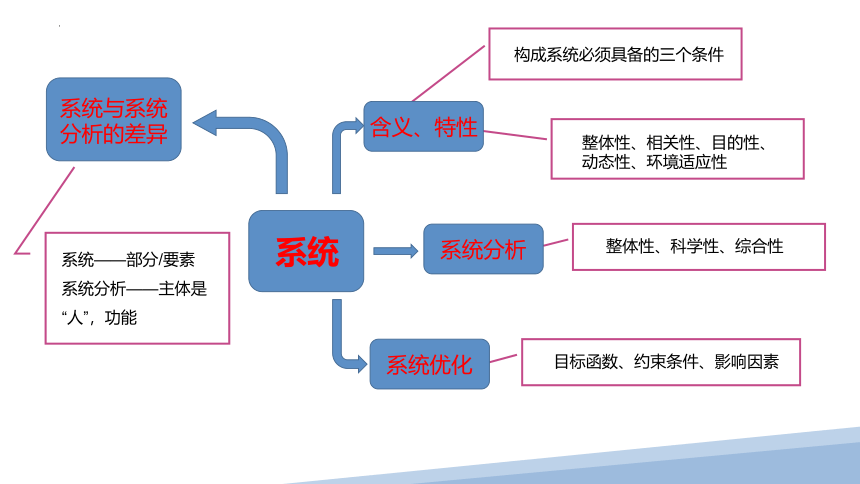
系统
构成系统必须具备的三个条件
整体性、相关性、目的性、
动态性、环境适应性
整体性、科学性、综合性
目标函数、约束条件、影响因素
系统分析
系统优化
含义、特性
系统与系统分析的差异
系统——部分/要素
系统分析——主体是“人”,功能
我们曾经踩过的“第一坑”
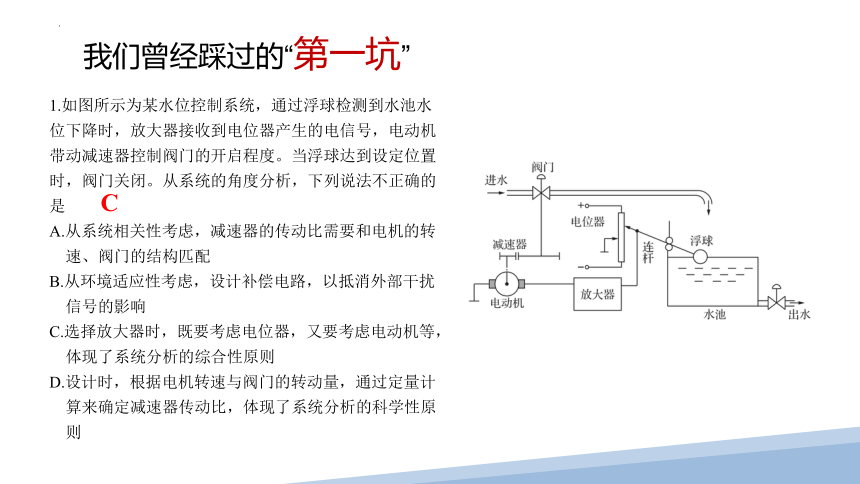
1.如图所示为某水位控制系统,通过浮球检测到水池水位下降时,放大器接收到电位器产生的电信号,电动机带动减速器控制阀门的开启程度。当浮球达到设定位置时,阀门关闭。从系统的角度分析,下列说法不正确的是
A.从系统相关性考虑,减速器的传动比需要和电机的转
速、阀门的结构匹配
B.从环境适应性考虑,设计补偿电路,以抵消外部干扰
信号的影响
C.选择放大器时,既要考虑电位器,又要考虑电动机等,
体现了系统分析的综合性原则
D.设计时,根据电机转速与阀门的转动量,通过定量计
算来确定减速器传动比,体现了系统分析的科学性原
则
C
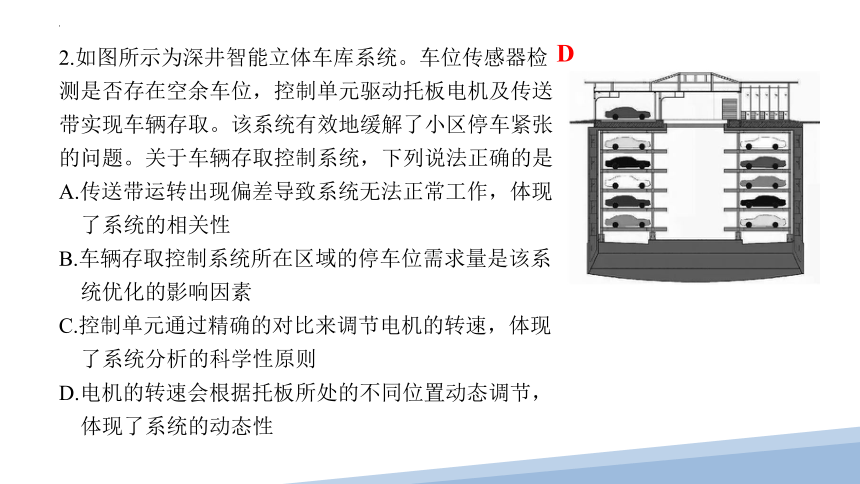
2.如图所示为深井智能立体车库系统。车位传感器检测是否存在空余车位,控制单元驱动托板电机及传送带实现车辆存取。该系统有效地缓解了小区停车紧张的问题。关于车辆存取控制系统,下列说法正确的是
A.传送带运转出现偏差导致系统无法正常工作,体现
了系统的相关性
B.车辆存取控制系统所在区域的停车位需求量是该系
统优化的影响因素
C.控制单元通过精确的对比来调节电机的转速,体现
了系统分析的科学性原则
D.电机的转速会根据托板所处的不同位置动态调节,
体现了系统的动态性
D
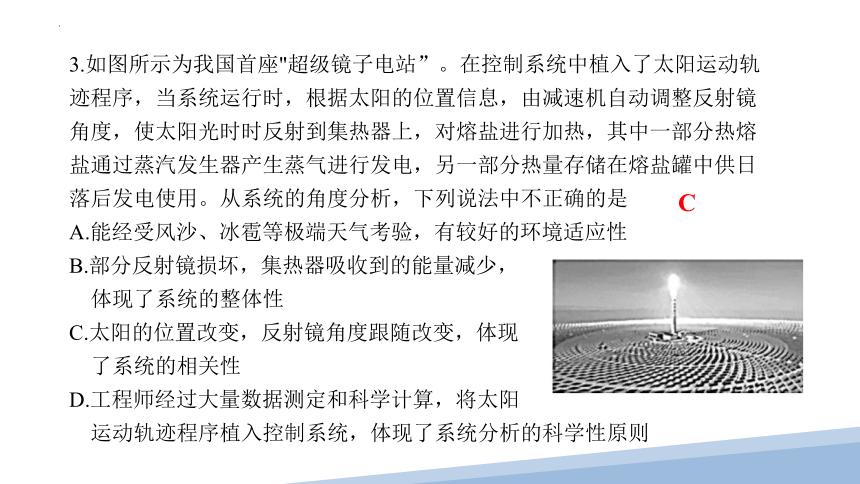
3.如图所示为我国首座"超级镜子电站”。在控制系统中植入了太阳运动轨迹程序,当系统运行时,根据太阳的位置信息,由减速机自动调整反射镜角度,使太阳光时时反射到集热器上,对熔盐进行加热,其中一部分热熔盐通过蒸汽发生器产生蒸气进行发电,另一部分热量存储在熔盐罐中供日落后发电使用。从系统的角度分析,下列说法中不正确的是
A.能经受风沙、冰雹等极端天气考验,有较好的环境适应性
B.部分反射镜损坏,集热器吸收到的能量减少,
体现了系统的整体性
C.太阳的位置改变,反射镜角度跟随改变,体现
了系统的相关性
D.工程师经过大量数据测定和科学计算,将太阳
运动轨迹程序植入控制系统,体现了系统分析的科学性原则
C
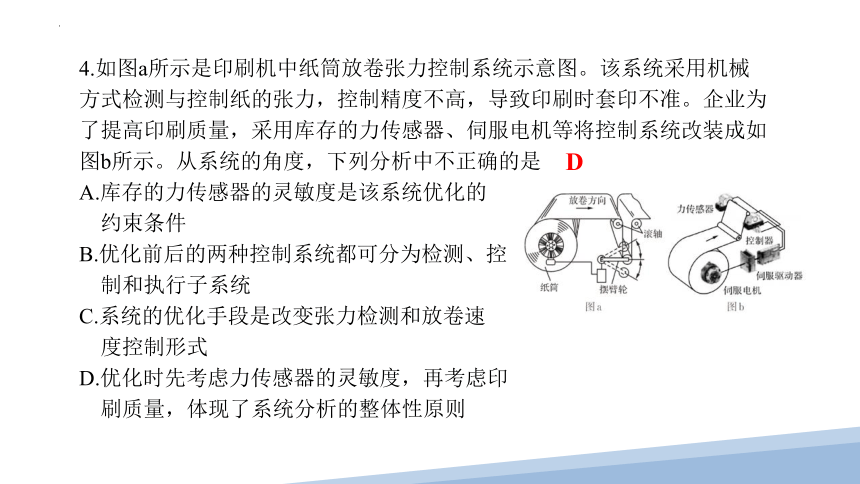
4.如图a所示是印刷机中纸筒放卷张力控制系统示意图。该系统采用机械方式检测与控制纸的张力,控制精度不高,导致印刷时套印不准。企业为了提高印刷质量,采用库存的力传感器、伺服电机等将控制系统改装成如图b所示。从系统的角度,下列分析中不正确的是
A.库存的力传感器的灵敏度是该系统优化的
约束条件
B.优化前后的两种控制系统都可分为检测、控
制和执行子系统
C.系统的优化手段是改变张力检测和放卷速
度控制形式
D.优化时先考虑力传感器的灵敏度,再考虑印
刷质量,体现了系统分析的整体性原则
D
5.下列说法中正确的是
A.孝襄高速公路建设过程中,综合考虑建设成本、生态保护等目
标,体现了系统分析的整体性原则
B.丁谓修复皇宫所采用的解决方案,使烧砖、运输建材和处理废
墟任务协调起来,一举三得,体现了系统分析的科学性原则
C.高铁技术是多种学科、多方面知识共同作用的结果,体现了系
统分析的综合性原则
D.农业间作套种的技术水平、田间管理等是农作物种植增产增收
的影响因素
D
6.太阳能热水器优化系统是在不改变现有太阳能热水器的结构下,在输出管道上和水箱上增加该套装置。该装置由气泵电磁阀、单向阀、电动遮阳帘和喷淋装置等辅助的电气控制部分组成。与现有太阳能热水器相比它有以下优点:不必先放出管道内储存的冷水即可热水沐浴;解决了管道冬天结冰堵死、夏天闷烧爆管问题;即使停电该系统依然能够正常运作。下列关于该系统设计的分析中正确的是
A.电磁阀损坏会影响整个系统的运作,体现了系统的相关性
B.解决了管道冬天结冰堵死、夏天闷烧爆管等问题,体现了系统的综合性
C.停电后可照常工作,体现了系统的动态性
D.气泵、电磁阀、单向阀、电动遮阳帘和喷淋装置等组成系统,体现了系统的整体性
D
7.如图所示为一款会议平板,集白板、音响、电脑投影仪、显示器、广告机为一体。使用WiFi无线传输技术轻松“连接”手机、电脑等设备进行多媒体内容的传输、解析、展示。从系统的角度分析,下列说法中正确的是
A.内置安卓系统需要不断地升级,体现了系统的动态性
B.融合高清显示、人机交互、多媒体信息处理和网络
传输等多项技术,体现了系统分析的综合性原则
C.能替代广告机演示广告图片,也能替代投影仪,赋予
PPT更好的演示效果,体现了系统的相关性
D.WiFi无线传输技术是该系统优化的影响因素
A
8.如图所示为机械臂运动限位系统示意图。位置传感器设置在机械臂的左右需要限位的位置,当机械臂左右运动靠近位置传感器时,位置传感器感知到机械臂接近并在达到规定的检测距离时给PLC发送信号,经伺服电机使机械臂停止运行,从而使机械臂在一定位置范围内运转。下列关于该机械臂运动限位系统的说法中不正确的是
A.伺服电机输出的功率应能驱动机械臂运动,
体现了系统的相关性
B.设计该系统时,既要考虑功能的实现,又要
考虑成本,体现了系统分析的综合性原则
C.位置传感器的目的是检测机械臂的位置,体现了系统的目的性
D.设计团队的人员分工及设计水平是系统优化的影响因素
C
控制
人工、自动、智能
开环控制
闭环控制
除输入量(给定值)外
控制方式
干扰
控制手段
开环控制与闭环控制的差异
因为______,______对______发出指令,希望______ ________。
1.如图所示是汽车蓄电池电量控制系统示意图。汽车电气负载消耗蓄电池的电能,当蓄电池电量下降到设定值下限时,发电机在动力控制模块的控制下给蓄电池充电,电量检测装置检测到蓄电池电量达到设定值上限时,发电机停止给蓄电池充电。下列关于该控制系统的分析中正确的是
A.被控对象是汽车
B.汽车电气负载变化属于干扰因素
C.执行器是动力控制模块
D.控制量是蓄电池的电量
我们曾经踩过的“第二坑”
B
2.如图所示是注塑成型机的结构原理示意图。原料被加热器熔化并保持恒定温度流入注塑腔,加气缸将气体充入注塑腔与熔融原料混合后,由液压杆推入模具。当模具内空腔被填满后,液压杆会保持一定时间的恒定推力,防止原料回流造成成型缺陷。当模具内模型凝固后,打开模具,顶杆将模型顶出,并准备制作下一个模型。从控制的角度分析,下列说法中正确的是
A.液压杆压力保持控制系统的执行器是加气缸
B.液压杆将混合原料推入模具,如在模具内检测
到异物时立即停止工作,该控制属于闭环控制
C.输入原料的实际温度可能是温度控制系统的干
扰因素
D.温度控制系统的被控对象为加热器
C
3.如图所示是一款自动扫地机器人。其内部由侦测系统和清洁系统组成。当内置的红外线传感器检测到垃圾种类以及方位后,中央处理器根据红外线传感器检测到的数据规划清理模式,随后控制行进电机控制机器人的方向,同时开启扫地电动机控制毛刷清洁地面,完成后返回充电处关机进行充电。
下列关于扫地机器人的清洁系统的分析中,不正确的是
A.该系统的被控对象是地面上的垃圾
B.输人量是红外线传感器检测到的信号
C.该系统是开环控制系统
D.电动机的精度会影响清洁的效果
A
4.如图所示是播种机开沟深度控制系统示意图。该控制系统主要由液压缸行程控制子系统和开沟机械控制子系统组成,地表高度检测机构随田间起伏上下浮动,位移传感器2检测地表高度并将信号传递给PLC确定开沟深度,位移传感器1检测液压缸的行程并将信号传递给PLC,当实际开沟深度超过设定值时,PLC输出信号驱动电磁阀工作,通过液压缸调节四连杆仿形机构进而调节开沟深度。请根据图及其描述完成第(1)—(2)题。
(1)从系统的角度,下列分析中不正确的是
A.液压缸磨损会影响开沟深度的精度,体现了系统的目的性
B.该控制系统主要由液压缸行程控制子系统和开沟机械控制子系统组成,体现了系统的整体性
C.系统设计时需要经历多次数学建模以确定液压缸行程与开沟深度间的关系,体现了系统分析的科学性原则
D.田间上下起伏属于该开沟深度控制系统精度优化的约束条件
(2)关于该液压缸行程控制子系统,下列分析正确的是
A.位移传感器1检测到的信号为输入量
B.被控对象是四连杆仿形机构
C.控制量是驱动电磁阀工作的信号
D.被控量是液压缸的行程
A
D
5.如图所示为光电纠偏系统,光电纠偏可对如卷筒纸薄膜、无纺布、织布等卷材进行纠偏,使卷材沿直线前进而不产生蛇形偏差。光电纠偏系统的工作原理是:由传感器检测单边的位置,以拾取位置偏差信号,由微电脑纠偏控制器将位置偏差信号进行逻辑运算,产生控制信号,来驱动电机丝杠机械装置,修正卷材运行时的蛇型偏差,控制卷材沿直线运动。该光电纠偏系统的控制方式和控制手段分别属于_______和________(A.手动控制;B.自动控制;C.开环控制;D.闭环控制)
D
B
6.如图所示是某全自动洗车系统组成示意图,包括驻车位置定位指示系统、高压喷水控制系统、自动排泥系统、交通信号灯和道闸起落控制子系统等。红外对射探头感知车辆进入预设洗车区域,PLC控制高压水泵启动并驱动电磁阀开启,侧面喷头开始出水进行洗消作业,一段时间后停止出水,启动上端烘干风机对车辆进行烘干,风机停转后信号灯变绿,道闸开启起落杆向上抬起,洗车结束。请根据描述及示意图,完成第(1)—(2)题。
(1)下列关于该洗车系统的说法中,不正确的是
A.高压水泵输出的功率应能匹配侧面喷头出水所需的水压值,体现了系统的相关性
B.红外对射探头的功能主要检测有无待洗车辆,体现了系统的目的性
C.该系统在不同地域、不同车型均可正常洗车,体现了系统的环境适应性
D.系统中任意部分出现故障,均会导致洗车异常,体现了系统的整体性
(2)下列关于高压喷水控制子系统的分析中,不正确的是
A.输入量是红外对射传感器检测到的信号
B.被控对象是侧面喷头
C.红外对射探头属于反馈检测装置
D.控制方式属于开环控制
B
C
7.(202301)如图所示的装配系统,包含工件传输子系统和机械装配子系统,其工作过程:工件A整齐排列在传送带I上,当位置检测传感器检测到工件A时,传送带I暂停;工件B放置在传送带1I上,当工件B进入相机的拍摄范围时,传送带II 暂停;相机拍摄工件B的图像并传送到工控机,工控机根据工件B相对于基准位置的偏差确定工件B的坐标,控制机械手抓取工件A并装配到工件B上。请根据示意图和描述完成(1)—(2)题。
(1)下列关于该装配系统的设计与分析中不恰当的是
A.工控机的运行速度会影响工件装配效率
B.位置检测传感器的可靠性对装配系统工作的稳定性没有影响
C.设计系统时需要根据产能要求计算传送带和机械手的运行速度
D.选择机械手时需要考虑工件A的质量大小
(2)下列关于机械手装配子系统控制的分析中合理的是
A装配速度是该装配子系统的被控量
B.基准位置的调整是工件装配的干扰因素
C.相机拍摄的工件B的图像信息是输入量
D.把工件A装配到工件B的过程采用了闭环控制方式
B
C
系统、控制专题
2023.4.??
系统
构成系统必须具备的三个条件
整体性、相关性、目的性、
动态性、环境适应性
整体性、科学性、综合性
目标函数、约束条件、影响因素
系统分析
系统优化
含义、特性
系统与系统分析的差异
系统——部分/要素
系统分析——主体是“人”,功能
我们曾经踩过的“第一坑”
1.如图所示为某水位控制系统,通过浮球检测到水池水位下降时,放大器接收到电位器产生的电信号,电动机带动减速器控制阀门的开启程度。当浮球达到设定位置时,阀门关闭。从系统的角度分析,下列说法不正确的是
A.从系统相关性考虑,减速器的传动比需要和电机的转
速、阀门的结构匹配
B.从环境适应性考虑,设计补偿电路,以抵消外部干扰
信号的影响
C.选择放大器时,既要考虑电位器,又要考虑电动机等,
体现了系统分析的综合性原则
D.设计时,根据电机转速与阀门的转动量,通过定量计
算来确定减速器传动比,体现了系统分析的科学性原
则
C
2.如图所示为深井智能立体车库系统。车位传感器检测是否存在空余车位,控制单元驱动托板电机及传送带实现车辆存取。该系统有效地缓解了小区停车紧张的问题。关于车辆存取控制系统,下列说法正确的是
A.传送带运转出现偏差导致系统无法正常工作,体现
了系统的相关性
B.车辆存取控制系统所在区域的停车位需求量是该系
统优化的影响因素
C.控制单元通过精确的对比来调节电机的转速,体现
了系统分析的科学性原则
D.电机的转速会根据托板所处的不同位置动态调节,
体现了系统的动态性
D
3.如图所示为我国首座"超级镜子电站”。在控制系统中植入了太阳运动轨迹程序,当系统运行时,根据太阳的位置信息,由减速机自动调整反射镜角度,使太阳光时时反射到集热器上,对熔盐进行加热,其中一部分热熔盐通过蒸汽发生器产生蒸气进行发电,另一部分热量存储在熔盐罐中供日落后发电使用。从系统的角度分析,下列说法中不正确的是
A.能经受风沙、冰雹等极端天气考验,有较好的环境适应性
B.部分反射镜损坏,集热器吸收到的能量减少,
体现了系统的整体性
C.太阳的位置改变,反射镜角度跟随改变,体现
了系统的相关性
D.工程师经过大量数据测定和科学计算,将太阳
运动轨迹程序植入控制系统,体现了系统分析的科学性原则
C
4.如图a所示是印刷机中纸筒放卷张力控制系统示意图。该系统采用机械方式检测与控制纸的张力,控制精度不高,导致印刷时套印不准。企业为了提高印刷质量,采用库存的力传感器、伺服电机等将控制系统改装成如图b所示。从系统的角度,下列分析中不正确的是
A.库存的力传感器的灵敏度是该系统优化的
约束条件
B.优化前后的两种控制系统都可分为检测、控
制和执行子系统
C.系统的优化手段是改变张力检测和放卷速
度控制形式
D.优化时先考虑力传感器的灵敏度,再考虑印
刷质量,体现了系统分析的整体性原则
D
5.下列说法中正确的是
A.孝襄高速公路建设过程中,综合考虑建设成本、生态保护等目
标,体现了系统分析的整体性原则
B.丁谓修复皇宫所采用的解决方案,使烧砖、运输建材和处理废
墟任务协调起来,一举三得,体现了系统分析的科学性原则
C.高铁技术是多种学科、多方面知识共同作用的结果,体现了系
统分析的综合性原则
D.农业间作套种的技术水平、田间管理等是农作物种植增产增收
的影响因素
D
6.太阳能热水器优化系统是在不改变现有太阳能热水器的结构下,在输出管道上和水箱上增加该套装置。该装置由气泵电磁阀、单向阀、电动遮阳帘和喷淋装置等辅助的电气控制部分组成。与现有太阳能热水器相比它有以下优点:不必先放出管道内储存的冷水即可热水沐浴;解决了管道冬天结冰堵死、夏天闷烧爆管问题;即使停电该系统依然能够正常运作。下列关于该系统设计的分析中正确的是
A.电磁阀损坏会影响整个系统的运作,体现了系统的相关性
B.解决了管道冬天结冰堵死、夏天闷烧爆管等问题,体现了系统的综合性
C.停电后可照常工作,体现了系统的动态性
D.气泵、电磁阀、单向阀、电动遮阳帘和喷淋装置等组成系统,体现了系统的整体性
D
7.如图所示为一款会议平板,集白板、音响、电脑投影仪、显示器、广告机为一体。使用WiFi无线传输技术轻松“连接”手机、电脑等设备进行多媒体内容的传输、解析、展示。从系统的角度分析,下列说法中正确的是
A.内置安卓系统需要不断地升级,体现了系统的动态性
B.融合高清显示、人机交互、多媒体信息处理和网络
传输等多项技术,体现了系统分析的综合性原则
C.能替代广告机演示广告图片,也能替代投影仪,赋予
PPT更好的演示效果,体现了系统的相关性
D.WiFi无线传输技术是该系统优化的影响因素
A
8.如图所示为机械臂运动限位系统示意图。位置传感器设置在机械臂的左右需要限位的位置,当机械臂左右运动靠近位置传感器时,位置传感器感知到机械臂接近并在达到规定的检测距离时给PLC发送信号,经伺服电机使机械臂停止运行,从而使机械臂在一定位置范围内运转。下列关于该机械臂运动限位系统的说法中不正确的是
A.伺服电机输出的功率应能驱动机械臂运动,
体现了系统的相关性
B.设计该系统时,既要考虑功能的实现,又要
考虑成本,体现了系统分析的综合性原则
C.位置传感器的目的是检测机械臂的位置,体现了系统的目的性
D.设计团队的人员分工及设计水平是系统优化的影响因素
C
控制
人工、自动、智能
开环控制
闭环控制
除输入量(给定值)外
控制方式
干扰
控制手段
开环控制与闭环控制的差异
因为______,______对______发出指令,希望______ ________。
1.如图所示是汽车蓄电池电量控制系统示意图。汽车电气负载消耗蓄电池的电能,当蓄电池电量下降到设定值下限时,发电机在动力控制模块的控制下给蓄电池充电,电量检测装置检测到蓄电池电量达到设定值上限时,发电机停止给蓄电池充电。下列关于该控制系统的分析中正确的是
A.被控对象是汽车
B.汽车电气负载变化属于干扰因素
C.执行器是动力控制模块
D.控制量是蓄电池的电量
我们曾经踩过的“第二坑”
B
2.如图所示是注塑成型机的结构原理示意图。原料被加热器熔化并保持恒定温度流入注塑腔,加气缸将气体充入注塑腔与熔融原料混合后,由液压杆推入模具。当模具内空腔被填满后,液压杆会保持一定时间的恒定推力,防止原料回流造成成型缺陷。当模具内模型凝固后,打开模具,顶杆将模型顶出,并准备制作下一个模型。从控制的角度分析,下列说法中正确的是
A.液压杆压力保持控制系统的执行器是加气缸
B.液压杆将混合原料推入模具,如在模具内检测
到异物时立即停止工作,该控制属于闭环控制
C.输入原料的实际温度可能是温度控制系统的干
扰因素
D.温度控制系统的被控对象为加热器
C
3.如图所示是一款自动扫地机器人。其内部由侦测系统和清洁系统组成。当内置的红外线传感器检测到垃圾种类以及方位后,中央处理器根据红外线传感器检测到的数据规划清理模式,随后控制行进电机控制机器人的方向,同时开启扫地电动机控制毛刷清洁地面,完成后返回充电处关机进行充电。
下列关于扫地机器人的清洁系统的分析中,不正确的是
A.该系统的被控对象是地面上的垃圾
B.输人量是红外线传感器检测到的信号
C.该系统是开环控制系统
D.电动机的精度会影响清洁的效果
A
4.如图所示是播种机开沟深度控制系统示意图。该控制系统主要由液压缸行程控制子系统和开沟机械控制子系统组成,地表高度检测机构随田间起伏上下浮动,位移传感器2检测地表高度并将信号传递给PLC确定开沟深度,位移传感器1检测液压缸的行程并将信号传递给PLC,当实际开沟深度超过设定值时,PLC输出信号驱动电磁阀工作,通过液压缸调节四连杆仿形机构进而调节开沟深度。请根据图及其描述完成第(1)—(2)题。
(1)从系统的角度,下列分析中不正确的是
A.液压缸磨损会影响开沟深度的精度,体现了系统的目的性
B.该控制系统主要由液压缸行程控制子系统和开沟机械控制子系统组成,体现了系统的整体性
C.系统设计时需要经历多次数学建模以确定液压缸行程与开沟深度间的关系,体现了系统分析的科学性原则
D.田间上下起伏属于该开沟深度控制系统精度优化的约束条件
(2)关于该液压缸行程控制子系统,下列分析正确的是
A.位移传感器1检测到的信号为输入量
B.被控对象是四连杆仿形机构
C.控制量是驱动电磁阀工作的信号
D.被控量是液压缸的行程
A
D
5.如图所示为光电纠偏系统,光电纠偏可对如卷筒纸薄膜、无纺布、织布等卷材进行纠偏,使卷材沿直线前进而不产生蛇形偏差。光电纠偏系统的工作原理是:由传感器检测单边的位置,以拾取位置偏差信号,由微电脑纠偏控制器将位置偏差信号进行逻辑运算,产生控制信号,来驱动电机丝杠机械装置,修正卷材运行时的蛇型偏差,控制卷材沿直线运动。该光电纠偏系统的控制方式和控制手段分别属于_______和________(A.手动控制;B.自动控制;C.开环控制;D.闭环控制)
D
B
6.如图所示是某全自动洗车系统组成示意图,包括驻车位置定位指示系统、高压喷水控制系统、自动排泥系统、交通信号灯和道闸起落控制子系统等。红外对射探头感知车辆进入预设洗车区域,PLC控制高压水泵启动并驱动电磁阀开启,侧面喷头开始出水进行洗消作业,一段时间后停止出水,启动上端烘干风机对车辆进行烘干,风机停转后信号灯变绿,道闸开启起落杆向上抬起,洗车结束。请根据描述及示意图,完成第(1)—(2)题。
(1)下列关于该洗车系统的说法中,不正确的是
A.高压水泵输出的功率应能匹配侧面喷头出水所需的水压值,体现了系统的相关性
B.红外对射探头的功能主要检测有无待洗车辆,体现了系统的目的性
C.该系统在不同地域、不同车型均可正常洗车,体现了系统的环境适应性
D.系统中任意部分出现故障,均会导致洗车异常,体现了系统的整体性
(2)下列关于高压喷水控制子系统的分析中,不正确的是
A.输入量是红外对射传感器检测到的信号
B.被控对象是侧面喷头
C.红外对射探头属于反馈检测装置
D.控制方式属于开环控制
B
C
7.(202301)如图所示的装配系统,包含工件传输子系统和机械装配子系统,其工作过程:工件A整齐排列在传送带I上,当位置检测传感器检测到工件A时,传送带I暂停;工件B放置在传送带1I上,当工件B进入相机的拍摄范围时,传送带II 暂停;相机拍摄工件B的图像并传送到工控机,工控机根据工件B相对于基准位置的偏差确定工件B的坐标,控制机械手抓取工件A并装配到工件B上。请根据示意图和描述完成(1)—(2)题。
(1)下列关于该装配系统的设计与分析中不恰当的是
A.工控机的运行速度会影响工件装配效率
B.位置检测传感器的可靠性对装配系统工作的稳定性没有影响
C.设计系统时需要根据产能要求计算传送带和机械手的运行速度
D.选择机械手时需要考虑工件A的质量大小
(2)下列关于机械手装配子系统控制的分析中合理的是
A装配速度是该装配子系统的被控量
B.基准位置的调整是工件装配的干扰因素
C.相机拍摄的工件B的图像信息是输入量
D.把工件A装配到工件B的过程采用了闭环控制方式
B
C
同课章节目录