12.1杠杆第2课时课件(共16张PPT)2022-2023学年人教版八年级物理下册
文档属性
| 名称 | 12.1杠杆第2课时课件(共16张PPT)2022-2023学年人教版八年级物理下册 |

|
|
| 格式 | zip | ||
| 文件大小 | 441.6KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2023-05-02 00:00:00 | ||
图片预览
文档简介
(共16张PPT)
§12.1《杠杆》第二课时
预习案
1.平衡状态是指物体处于 或 。
2..当杠杆处于______状态或_________________状态时,我们就说杠杆平衡了.
3.杠杆平衡条件是:动力×_______=阻力×_______,
即:F1×_____=F2×_____.
(1)根据杠杆的平衡条件
如果L1>L2,那么杠杆平衡时F1___ F2,此时杠杆是______杠杆。
(2)如果L1(3)如果L1=L2那么F1______F2,此时杠杆是______杠杆,
静止
匀速直线运动
静止
匀速转动
动力臂
阻力臂
L1
L2
<
省力
>
费力
=
等臂
探究案
探究活动一:杠杆的平衡条件
1、杠杆的平衡状态:
杠杆在动力和阻力的作用下处于 ________状态
或 __________状态。
2、探究杠杆的平衡条件
提出问题:杠杆平衡时,动力、动力臂与阻力、阻力臂之间存在怎样的定量关系?
猜想:____________________________________________
设计实验:
静止
匀速转动
动力×动力臂=阻力×阻力臂
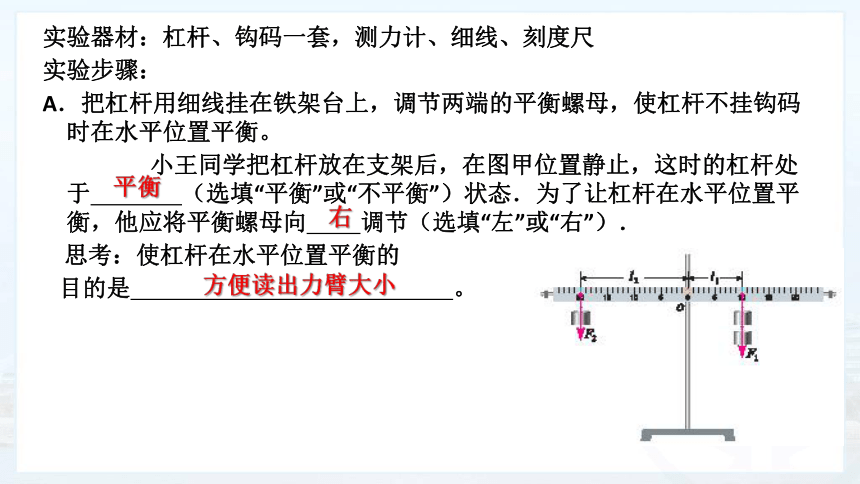
实验器材:杠杆、钩码一套,测力计、细线、刻度尺
实验步骤:
A.把杠杆用细线挂在铁架台上,调节两端的平衡螺母,使杠杆不挂钩码时在水平位置平衡。
小王同学把杠杆放在支架后,在图甲位置静止,这时的杠杆处于 (选填“平衡”或“不平衡”)状态.为了让杠杆在水平位置平衡,他应将平衡螺母向 调节(选填“左”或“右”).
思考:使杠杆在水平位置平衡的
目的是 。
平衡
右
方便读出力臂大小
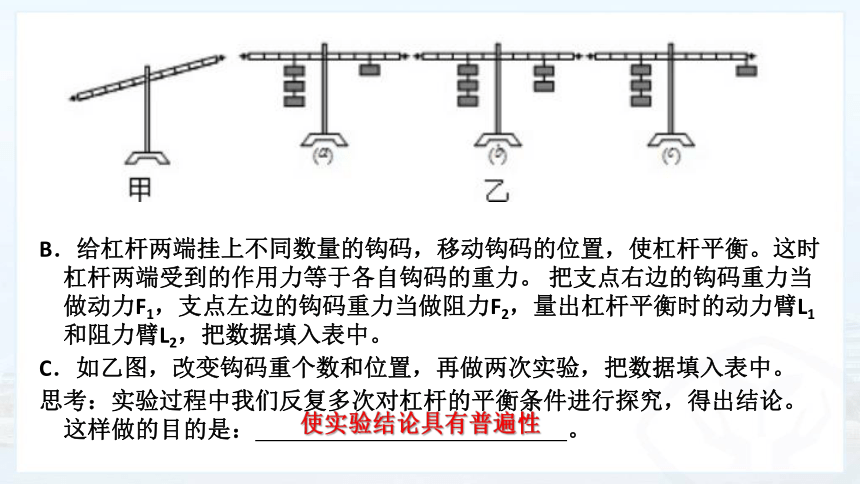
B.给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆平衡。这时杠杆两端受到的作用力等于各自钩码的重力。 把支点右边的钩码重力当做动力F1,支点左边的钩码重力当做阻力F2,量出杠杆平衡时的动力臂L1和阻力臂L2,把数据填入表中。
C.如乙图,改变钩码重个数和位置,再做两次实验,把数据填入表中。
思考:实验过程中我们反复多次对杠杆的平衡条件进行探究,得出结论。这样做的目的是: 。
使实验结论具有普遍性
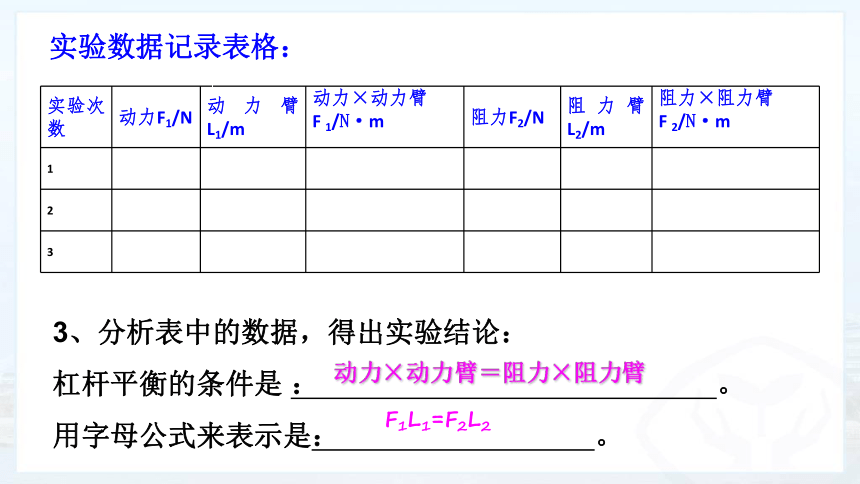
实验数据记录表格:
实验次数 动力F1/N 动力臂L1/m 动力×动力臂 F 1/N·m 阻力F2/N 阻力臂L2/m 阻力×阻力臂
F 2/N·m
1
2
3
3、分析表中的数据,得出实验结论:
杠杆平衡的条件是 : 。
用字母公式来表示是: 。
动力×动力臂=阻力×阻力臂
F1L1=F2L2
注意:
① 在公式中各物理量的单位要统一。
② 转动方向判断:若F1L1>F2L2时,沿F1方向转动;若F1L1《F2L2,沿F2方向转动。
③ 从公式看,动力臂是阻力臂的几倍,动力就是阻力的几分之一。
④调节杠杆平衡方法:(与调节天平横梁平衡相同:左沉右旋、 右沉左旋)
1、杠杆的动力臂L1为2米,阻力臂L2为0.2米,若阻力F2为300牛,求杠杆平衡时的动力F1为 N。
2、在“探究杠杆平衡条件”的实验中:
(1)实验前,先把杠杆的中点支在支架上,调节两端的平衡螺母,使杠杆在______________位置平衡。(图中杠杆上每格距离相等)
(2)实验中,改变支点两侧的钩码位置和个数,一般要做三次实验,得到三组数据并进行分析,这样做的目的是:_______________________。
(3)如下图所示,杠杆处于平衡状态.如果在支点两侧的钩码下方分别再挂一个等重钩码后,
杠杆________保持平衡(选填“能”或“不能”)。
30
水平
使实验结论具有普遍性
不能
探究活动二:生活中的杠杆
(1)省力杠杆:动力臂 阻力臂,动力 阻力;这种杠杆,
省了 ,费了 。
(2)费力杠杆:动力臂 阻力臂,动力 阻力;这种杠杆,
费了 ,省了 。
(3)等臂杠杆:动力臂 阻力臂,动力 阻力;这种杠杆,既不省力也不费力。
>
<
力
距离
比如:起子、动滑轮、轮轴、羊角锤、手推车
<
>
力
距离
比如:镊子、筷子、人的前臂、理发剪刀、钓鱼杆
=
=
比如:天平、定滑轮
课堂小结
1、杠杆平衡条件是:动力× = ×阻力臂。
2、省力杠杆的动力臂______阻力臂,_____省力,但____距离.
3、费力杠杆的动力臂______阻力臂,_____省力,但____距离.
4、等臂杠杆的动力臂_______阻力臂,不省力也不费力,不省距离也不费距离.
动力臂
阻力
>
可以
费
<
不可以
可以
等于
练习:
1、下列属于省力杠杆的是( )
A钓鱼竿 B筷子 C镊子 D开啤酒瓶盖用的起子
2、 工地上建筑工人常用如图所示的小车运送重物,为了更省力( )
A.手尽可能握在车把的前部,减小阻力臂
B.手尽可能握在车把的前部,减小动力臂
C.手尽可能握在车把的后部,增大阻力臂
D.手尽可能握在车把的后部,增大动力臂
D
D
3、下列工具属于费力杠杆的是( )
4、如图3所示,杠杆处于平衡状态,若在两边的钩码下,各加一个同样的钩码, 则:( )
A.杠杆仍保持平衡
B.杠杆A端下降
C.杠杆B端下降
D.无法判断
B
C
5、在“探究杠杆平衡条件”的实验中:
(1)实验前没有挂钩码时,若杠杆右端下倾,则应将右端的平衡螺母像 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图所示,杠杆在水平位置平衡后,若将左侧的3个钩码该挂在D处,要使杠杆仍然保持平衡,则应将右端钩码该挂在 处。
(3)如图所示,杠杆在水平位置平衡后,若在左侧的3个钩码下添加1个钩码,要使杠杆仍然保持平衡,则应将右侧钩码改挂在 处。
(4)分析有关实验数据,可得出
杠杆平衡条件是: 。
左
M
K
动力×动力臂=阻力×阻力臂
6、如图所示,杠杆水平放置且自重忽略不计,O是支点,左侧挂一重物,动力F1大小为3N,整个装置处于静止状态,则物体的重力为 N.此时杠杆属于 杠杆(选填“省力”或“费力”).
6
省力
根据杠杆平衡条件F1L1=F2L2,
重物甲挂在杠杆的左端A点,在杠杆B点施加竖直向下的力F1时,
G甲×OA=F1×OB,
G甲= = =
7、如图31所示,将一个长方体的重物甲挂在杠杆的左端A点,一个人在杠杆支点右侧的B点通过滑环对杠杆施加了竖直向下的力F1,使杠杆在水平位置静止,已知OA:OB=4:1,F1的大小为100N。求:重物甲的重力
图31
B
C
A
O
甲
F1×OB
OA
100N×1
4
25N
第二课时 完
§12.1《杠杆》第二课时
预习案
1.平衡状态是指物体处于 或 。
2..当杠杆处于______状态或_________________状态时,我们就说杠杆平衡了.
3.杠杆平衡条件是:动力×_______=阻力×_______,
即:F1×_____=F2×_____.
(1)根据杠杆的平衡条件
如果L1>L2,那么杠杆平衡时F1___ F2,此时杠杆是______杠杆。
(2)如果L1
静止
匀速直线运动
静止
匀速转动
动力臂
阻力臂
L1
L2
<
省力
>
费力
=
等臂
探究案
探究活动一:杠杆的平衡条件
1、杠杆的平衡状态:
杠杆在动力和阻力的作用下处于 ________状态
或 __________状态。
2、探究杠杆的平衡条件
提出问题:杠杆平衡时,动力、动力臂与阻力、阻力臂之间存在怎样的定量关系?
猜想:____________________________________________
设计实验:
静止
匀速转动
动力×动力臂=阻力×阻力臂
实验器材:杠杆、钩码一套,测力计、细线、刻度尺
实验步骤:
A.把杠杆用细线挂在铁架台上,调节两端的平衡螺母,使杠杆不挂钩码时在水平位置平衡。
小王同学把杠杆放在支架后,在图甲位置静止,这时的杠杆处于 (选填“平衡”或“不平衡”)状态.为了让杠杆在水平位置平衡,他应将平衡螺母向 调节(选填“左”或“右”).
思考:使杠杆在水平位置平衡的
目的是 。
平衡
右
方便读出力臂大小
B.给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆平衡。这时杠杆两端受到的作用力等于各自钩码的重力。 把支点右边的钩码重力当做动力F1,支点左边的钩码重力当做阻力F2,量出杠杆平衡时的动力臂L1和阻力臂L2,把数据填入表中。
C.如乙图,改变钩码重个数和位置,再做两次实验,把数据填入表中。
思考:实验过程中我们反复多次对杠杆的平衡条件进行探究,得出结论。这样做的目的是: 。
使实验结论具有普遍性
实验数据记录表格:
实验次数 动力F1/N 动力臂L1/m 动力×动力臂 F 1/N·m 阻力F2/N 阻力臂L2/m 阻力×阻力臂
F 2/N·m
1
2
3
3、分析表中的数据,得出实验结论:
杠杆平衡的条件是 : 。
用字母公式来表示是: 。
动力×动力臂=阻力×阻力臂
F1L1=F2L2
注意:
① 在公式中各物理量的单位要统一。
② 转动方向判断:若F1L1>F2L2时,沿F1方向转动;若F1L1《F2L2,沿F2方向转动。
③ 从公式看,动力臂是阻力臂的几倍,动力就是阻力的几分之一。
④调节杠杆平衡方法:(与调节天平横梁平衡相同:左沉右旋、 右沉左旋)
1、杠杆的动力臂L1为2米,阻力臂L2为0.2米,若阻力F2为300牛,求杠杆平衡时的动力F1为 N。
2、在“探究杠杆平衡条件”的实验中:
(1)实验前,先把杠杆的中点支在支架上,调节两端的平衡螺母,使杠杆在______________位置平衡。(图中杠杆上每格距离相等)
(2)实验中,改变支点两侧的钩码位置和个数,一般要做三次实验,得到三组数据并进行分析,这样做的目的是:_______________________。
(3)如下图所示,杠杆处于平衡状态.如果在支点两侧的钩码下方分别再挂一个等重钩码后,
杠杆________保持平衡(选填“能”或“不能”)。
30
水平
使实验结论具有普遍性
不能
探究活动二:生活中的杠杆
(1)省力杠杆:动力臂 阻力臂,动力 阻力;这种杠杆,
省了 ,费了 。
(2)费力杠杆:动力臂 阻力臂,动力 阻力;这种杠杆,
费了 ,省了 。
(3)等臂杠杆:动力臂 阻力臂,动力 阻力;这种杠杆,既不省力也不费力。
>
<
力
距离
比如:起子、动滑轮、轮轴、羊角锤、手推车
<
>
力
距离
比如:镊子、筷子、人的前臂、理发剪刀、钓鱼杆
=
=
比如:天平、定滑轮
课堂小结
1、杠杆平衡条件是:动力× = ×阻力臂。
2、省力杠杆的动力臂______阻力臂,_____省力,但____距离.
3、费力杠杆的动力臂______阻力臂,_____省力,但____距离.
4、等臂杠杆的动力臂_______阻力臂,不省力也不费力,不省距离也不费距离.
动力臂
阻力
>
可以
费
<
不可以
可以
等于
练习:
1、下列属于省力杠杆的是( )
A钓鱼竿 B筷子 C镊子 D开啤酒瓶盖用的起子
2、 工地上建筑工人常用如图所示的小车运送重物,为了更省力( )
A.手尽可能握在车把的前部,减小阻力臂
B.手尽可能握在车把的前部,减小动力臂
C.手尽可能握在车把的后部,增大阻力臂
D.手尽可能握在车把的后部,增大动力臂
D
D
3、下列工具属于费力杠杆的是( )
4、如图3所示,杠杆处于平衡状态,若在两边的钩码下,各加一个同样的钩码, 则:( )
A.杠杆仍保持平衡
B.杠杆A端下降
C.杠杆B端下降
D.无法判断
B
C
5、在“探究杠杆平衡条件”的实验中:
(1)实验前没有挂钩码时,若杠杆右端下倾,则应将右端的平衡螺母像 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图所示,杠杆在水平位置平衡后,若将左侧的3个钩码该挂在D处,要使杠杆仍然保持平衡,则应将右端钩码该挂在 处。
(3)如图所示,杠杆在水平位置平衡后,若在左侧的3个钩码下添加1个钩码,要使杠杆仍然保持平衡,则应将右侧钩码改挂在 处。
(4)分析有关实验数据,可得出
杠杆平衡条件是: 。
左
M
K
动力×动力臂=阻力×阻力臂
6、如图所示,杠杆水平放置且自重忽略不计,O是支点,左侧挂一重物,动力F1大小为3N,整个装置处于静止状态,则物体的重力为 N.此时杠杆属于 杠杆(选填“省力”或“费力”).
6
省力
根据杠杆平衡条件F1L1=F2L2,
重物甲挂在杠杆的左端A点,在杠杆B点施加竖直向下的力F1时,
G甲×OA=F1×OB,
G甲= = =
7、如图31所示,将一个长方体的重物甲挂在杠杆的左端A点,一个人在杠杆支点右侧的B点通过滑环对杠杆施加了竖直向下的力F1,使杠杆在水平位置静止,已知OA:OB=4:1,F1的大小为100N。求:重物甲的重力
图31
B
C
A
O
甲
F1×OB
OA
100N×1
4
25N
第二课时 完