12.1 杠杆-课件(共38张PPT)2022-2023学年人教版八年级下册物理
文档属性
| 名称 | 12.1 杠杆-课件(共38张PPT)2022-2023学年人教版八年级下册物理 |
|
|
| 格式 | pptx | ||
| 文件大小 | 3.2MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2023-05-30 00:00:00 | ||
图片预览


文档简介
(共38张PPT)
12 .1 杠杆
学习目标(课时1)
1、认识杠杆,知道有关杠杆的几个概念,
会做力臂。
2、能从常见的工具和简单机器中识别出杠杆。
自主学习
1、什么叫杠杆?
2、什么叫杠杆的支点、动力、阻力、动力臂 、
阻力臂?
阅读课本76——77页“杠杆”一块内容,思考以下问题:
复杂机械都是由简单机械组成的
最简单的机械----杠杆.
这些仪器在使用时,有什么共同特点
一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆
一、杠杆
1、定义:
二、杠杆的构成
(力的作用线)
动力臂
阻力臂
动力
阻力
(力的作用线)
o
支点
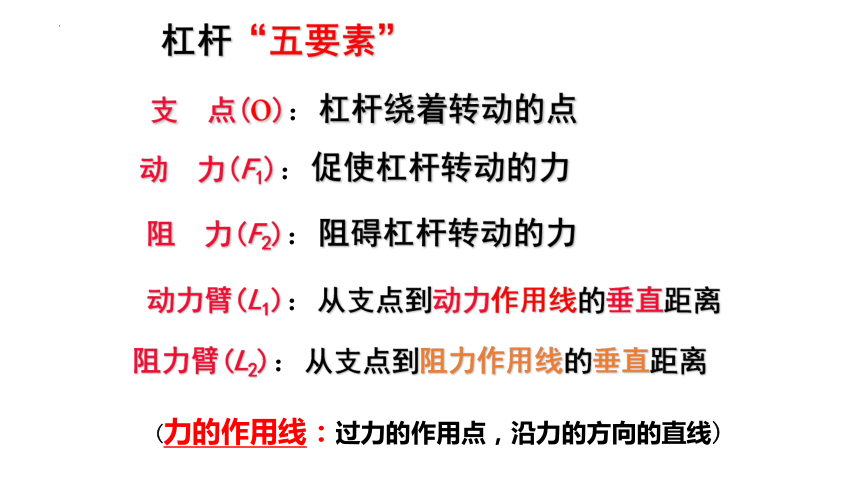
杠杆“五要素”
支 点(o):杠杆绕着转动的点
动 力(F1):促使杠杆转动的力
阻 力(F2):阻碍杠杆转动的力
动力臂(L1):从支点到动力作用线的垂直距离
阻力臂(L2):从支点到阻力作用线的垂直距离
(力的作用线:过力的作用点,沿力的方向的直线)
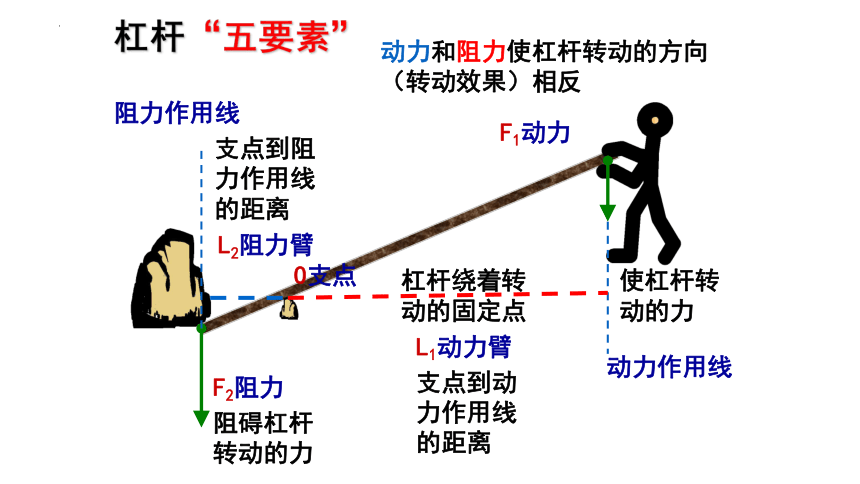
杠杆“五要素”
F2阻力
L1动力臂
L2阻力臂
动力作用线
阻力作用线
O支点
杠杆绕着转动的固定点
使杠杆转动的力
阻碍杠杆转动的力
支点到动力作用线的距离
支点到阻力作用线的距离
F1动力
动力和阻力使杠杆转动的方向(转动效果)相反
杠杆“五要素”
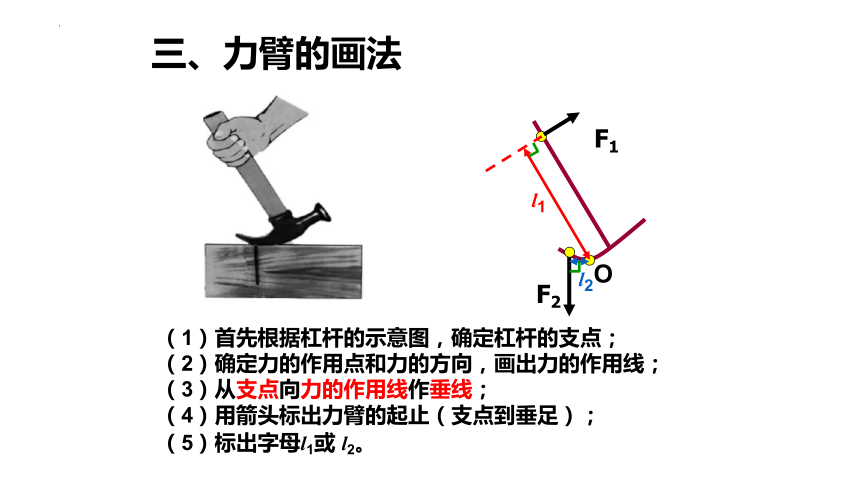
三、力臂的画法
O
F1
F2
l1
l2
(1)首先根据杠杆的示意图,确定杠杆的支点;
(2)确定力的作用点和力的方向,画出力的作用线;
(3)从支点向力的作用线作垂线;
(4)用箭头标出力臂的起止(支点到垂足);
(5)标出字母l1或 l2。
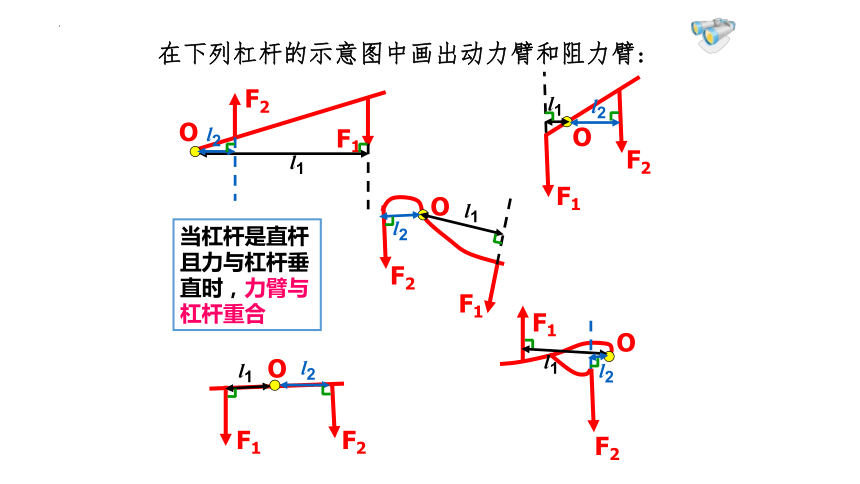
在下列杠杆的示意图中画出动力臂和阻力臂:
F1
F2
O
O
F1
F2
O
F1
F2
O
F1
F2
F1
F2
O
l1
l2
l1
l2
l2
l1
l1
l2
l1
l2
当杠杆是直杆且力与杠杆垂直时,力臂与杠杆重合
o
F1
F2
L1
L2
o
F1
F2
L2
L1
o
F1
F2
L1
L2
什么是杠杆的平衡?
杠杆平衡:
当杠杆在动力和阻力的作用下静止或作缓慢的匀速转动时,就说杠杆平衡。
怎样用杆秤称量物体的质量?
(1) 提出问题:
杠杆平衡时,动力、动力臂、阻力、阻力臂之间存在着怎样的关系?
(2)猜想与假设:
假设1:
假设2:
假设3:
假设4:
F1+L1=F2+L2
F1–L1=F2–L2
F1/L1=F2/L2
F1 · L1=F2 · L2
2. 杠杆的平衡条件
还有其他假设吗?
F12+L12=F22+L22
F13+L13=F23+L23
……
调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆平衡。这是杠杆两端受到的作用力等于各自钩码的重量。
(3) 制定计划与设计实验:
① 调节杠杆两端的螺母,使杠杆在水平位置平衡。
螺母
螺母
(4) 进行实验:
杠杆向右偏,则将平衡螺母往左调。
杠杆向左偏,则将平衡螺母往右调。
② 在杠杆两边挂上不同数量的钩码,调节钩码的位置,使杠杆在水平位置重新平衡。然后把实验数据填入表中。
F2
F1
L2
L1
③ 改变力和力臂的数值,再做两次实验,把实验数据填入表中。
实验次数 动力F1/N 动力臂l1/m 阻力F2/N 阻力臂l2/m
1
2
3
2
0.15
3
0.1
5
0.08
10
0.04
10
0.1
5
0.2
④ 求出各次实验中动力×动力臂和阻力×阻力臂的值,然后思考杠杆的平衡条件。
实验次数 动力F1/N 动力臂l1/m 动力 动力臂 阻力F2/N 阻力臂l2/m 阻力 阻力臂
1
2
3
2
0.15
3
0.1
5
0.08
10
0.04
10
0.1
5
0.2
0.3
0.3
0.4
0.4
1
1
杠杆的平衡条件是:
(5) 得出结论:
动力×动力臂=阻力×阻力臂
或写作: F1L1= F2L2
即:杠杆的平衡取决于力和力臂的乘积。
阿基米德杠杆原理
上面的关系也可以写成下面的形式:
阻力 动力臂
动力 阻力臂
或
F1 L2
F2 L1
动力 阻力臂
阻力 动力臂
或
F1 L2
F2 L1
杠杆两端可调节的平衡螺母,起什么作用
为什么要求杠杆静止时,在水平位置
平衡螺母调节杠杆自身的平衡。
力臂的数值在杠杆上可以直接读出或量出。
(6)交流与合作:
挂钩码后,能不能再调节平衡螺母?
不能。
O
O
O
F1
F1
F1
F2
F2
F2
O
L1
L2
支点
动力
阻力
动力臂
阻力臂
活动1:
观察L1与L2的大小关系
L1 > L2
O
O
F1
F2
L1
L2
F1
L1
F2
L2
L1 < L2
L1 = L2
从以上三幅图说明了什么问题?根据杠杆平衡的条件得出什么结论?
(1)当L1﹥L2时 F1﹤F2
(2)当L1﹦L2时 F1﹦F2
(3)当L1﹤L2时 F1﹥F2
三、杠杆的类型
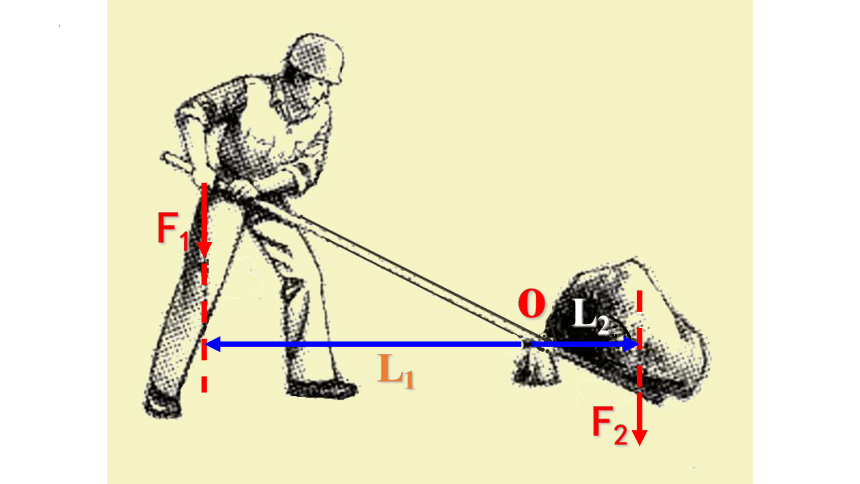
(1)省力杠杆:(动力臂大于 阻力臂)
F2
F1
L1
L2
O
h2
h1
O
h1 > h2
特点:省力但费距离
省力杠杆
O
F1
F2
O
F1
F2
O
F1
F2
O
F1
F2
L1
L2
L1
L2
L1
L2
L1
L2
练习
(2)费力杠杆:动力臂小于 阻力臂
F2
F1
L1
L2
O
特点:
h2
h1
O
费力但省距离
h1 < h2
费力杠杆
(3)等臂杠杆:动力臂等于 阻力臂
F2
F1
L1
L2
O
天平和定滑轮
特点:既不省力也不费力
练习1、下图中各种类型的杠杆中,省距离的是: ( )
A
2、如图所示是一个指甲刀的示意图;它由三个杠杆ABC、OBD和OED组成,用指甲刀剪指甲时,ABC是 杠杆,OBD是 杠杆
OED是 杠杆
省力
费力
费力
12 .1 杠杆
学习目标(课时1)
1、认识杠杆,知道有关杠杆的几个概念,
会做力臂。
2、能从常见的工具和简单机器中识别出杠杆。
自主学习
1、什么叫杠杆?
2、什么叫杠杆的支点、动力、阻力、动力臂 、
阻力臂?
阅读课本76——77页“杠杆”一块内容,思考以下问题:
复杂机械都是由简单机械组成的
最简单的机械----杠杆.
这些仪器在使用时,有什么共同特点
一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆
一、杠杆
1、定义:
二、杠杆的构成
(力的作用线)
动力臂
阻力臂
动力
阻力
(力的作用线)
o
支点
杠杆“五要素”
支 点(o):杠杆绕着转动的点
动 力(F1):促使杠杆转动的力
阻 力(F2):阻碍杠杆转动的力
动力臂(L1):从支点到动力作用线的垂直距离
阻力臂(L2):从支点到阻力作用线的垂直距离
(力的作用线:过力的作用点,沿力的方向的直线)
杠杆“五要素”
F2阻力
L1动力臂
L2阻力臂
动力作用线
阻力作用线
O支点
杠杆绕着转动的固定点
使杠杆转动的力
阻碍杠杆转动的力
支点到动力作用线的距离
支点到阻力作用线的距离
F1动力
动力和阻力使杠杆转动的方向(转动效果)相反
杠杆“五要素”
三、力臂的画法
O
F1
F2
l1
l2
(1)首先根据杠杆的示意图,确定杠杆的支点;
(2)确定力的作用点和力的方向,画出力的作用线;
(3)从支点向力的作用线作垂线;
(4)用箭头标出力臂的起止(支点到垂足);
(5)标出字母l1或 l2。
在下列杠杆的示意图中画出动力臂和阻力臂:
F1
F2
O
O
F1
F2
O
F1
F2
O
F1
F2
F1
F2
O
l1
l2
l1
l2
l2
l1
l1
l2
l1
l2
当杠杆是直杆且力与杠杆垂直时,力臂与杠杆重合
o
F1
F2
L1
L2
o
F1
F2
L2
L1
o
F1
F2
L1
L2
什么是杠杆的平衡?
杠杆平衡:
当杠杆在动力和阻力的作用下静止或作缓慢的匀速转动时,就说杠杆平衡。
怎样用杆秤称量物体的质量?
(1) 提出问题:
杠杆平衡时,动力、动力臂、阻力、阻力臂之间存在着怎样的关系?
(2)猜想与假设:
假设1:
假设2:
假设3:
假设4:
F1+L1=F2+L2
F1–L1=F2–L2
F1/L1=F2/L2
F1 · L1=F2 · L2
2. 杠杆的平衡条件
还有其他假设吗?
F12+L12=F22+L22
F13+L13=F23+L23
……
调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆平衡。这是杠杆两端受到的作用力等于各自钩码的重量。
(3) 制定计划与设计实验:
① 调节杠杆两端的螺母,使杠杆在水平位置平衡。
螺母
螺母
(4) 进行实验:
杠杆向右偏,则将平衡螺母往左调。
杠杆向左偏,则将平衡螺母往右调。
② 在杠杆两边挂上不同数量的钩码,调节钩码的位置,使杠杆在水平位置重新平衡。然后把实验数据填入表中。
F2
F1
L2
L1
③ 改变力和力臂的数值,再做两次实验,把实验数据填入表中。
实验次数 动力F1/N 动力臂l1/m 阻力F2/N 阻力臂l2/m
1
2
3
2
0.15
3
0.1
5
0.08
10
0.04
10
0.1
5
0.2
④ 求出各次实验中动力×动力臂和阻力×阻力臂的值,然后思考杠杆的平衡条件。
实验次数 动力F1/N 动力臂l1/m 动力 动力臂 阻力F2/N 阻力臂l2/m 阻力 阻力臂
1
2
3
2
0.15
3
0.1
5
0.08
10
0.04
10
0.1
5
0.2
0.3
0.3
0.4
0.4
1
1
杠杆的平衡条件是:
(5) 得出结论:
动力×动力臂=阻力×阻力臂
或写作: F1L1= F2L2
即:杠杆的平衡取决于力和力臂的乘积。
阿基米德杠杆原理
上面的关系也可以写成下面的形式:
阻力 动力臂
动力 阻力臂
或
F1 L2
F2 L1
动力 阻力臂
阻力 动力臂
或
F1 L2
F2 L1
杠杆两端可调节的平衡螺母,起什么作用
为什么要求杠杆静止时,在水平位置
平衡螺母调节杠杆自身的平衡。
力臂的数值在杠杆上可以直接读出或量出。
(6)交流与合作:
挂钩码后,能不能再调节平衡螺母?
不能。
O
O
O
F1
F1
F1
F2
F2
F2
O
L1
L2
支点
动力
阻力
动力臂
阻力臂
活动1:
观察L1与L2的大小关系
L1 > L2
O
O
F1
F2
L1
L2
F1
L1
F2
L2
L1 < L2
L1 = L2
从以上三幅图说明了什么问题?根据杠杆平衡的条件得出什么结论?
(1)当L1﹥L2时 F1﹤F2
(2)当L1﹦L2时 F1﹦F2
(3)当L1﹤L2时 F1﹥F2
三、杠杆的类型
(1)省力杠杆:(动力臂大于 阻力臂)
F2
F1
L1
L2
O
h2
h1
O
h1 > h2
特点:省力但费距离
省力杠杆
O
F1
F2
O
F1
F2
O
F1
F2
O
F1
F2
L1
L2
L1
L2
L1
L2
L1
L2
练习
(2)费力杠杆:动力臂小于 阻力臂
F2
F1
L1
L2
O
特点:
h2
h1
O
费力但省距离
h1 < h2
费力杠杆
(3)等臂杠杆:动力臂等于 阻力臂
F2
F1
L1
L2
O
天平和定滑轮
特点:既不省力也不费力
练习1、下图中各种类型的杠杆中,省距离的是: ( )
A
2、如图所示是一个指甲刀的示意图;它由三个杠杆ABC、OBD和OED组成,用指甲刀剪指甲时,ABC是 杠杆,OBD是 杠杆
OED是 杠杆
省力
费力
费力