第十二章 简单机械(章末复习 有答案)-2022-2023学年人教版八年级物理下册
文档属性
| 名称 | 第十二章 简单机械(章末复习 有答案)-2022-2023学年人教版八年级物理下册 |
|
|
| 格式 | docx | ||
| 文件大小 | 309.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2023-07-14 00:00:00 | ||
图片预览
文档简介
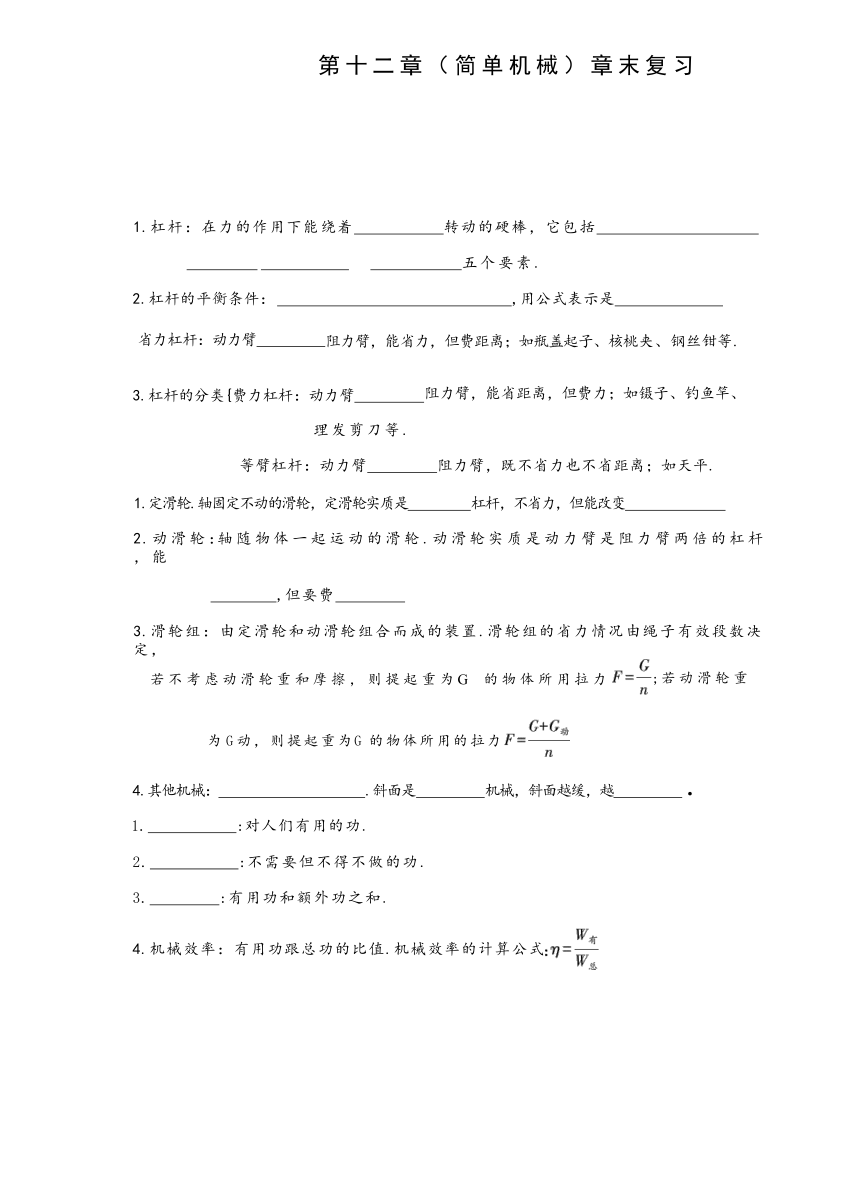
第十二章(简单机械)章末复习
1.杠杆:在力的作用下能绕着 转动的硬棒,它包括
五个要素.
2.杠杆的平衡条件: ,用公式表示是
省力杠杆:动力臂 阻力臂,能省力,但费距离;如瓶盖起子、核桃夹、钢丝钳等.
3.杠杆的分类{费力杠杆:动力臂 阻力臂,能省距离,但费力;如镊子、钓鱼竿、
理发剪刀等.
等臂杠杆:动力臂 阻力臂,既不省力也不省距离;如天平.
1.定滑轮.轴固定不动的滑轮,定滑轮实质是 杠杆,不省力,但能改变
2.动滑轮:轴随物体一起运动的滑轮.动滑轮实质是动力臂是阻力臂两倍的杠杆,能
,但要费
3.滑轮组:由定滑轮和动滑轮组合而成的装置.滑轮组的省力情况由绳子有效段数决定,
若不考虑动滑轮重和摩擦,则提起重为G 的物体所用拉力 ;若动滑轮重
为 G 动,则提起重为G 的物体所用的拉力
4.其他机械: .斜面是 机械,斜面越缓,越 ·
1. :对人们有用的功.
2. :不需要但不得不做的功.
3. :有用功和额外功之和.
4.机械效率:有用功跟总功的比值.机械效率的计算公式
易错题集
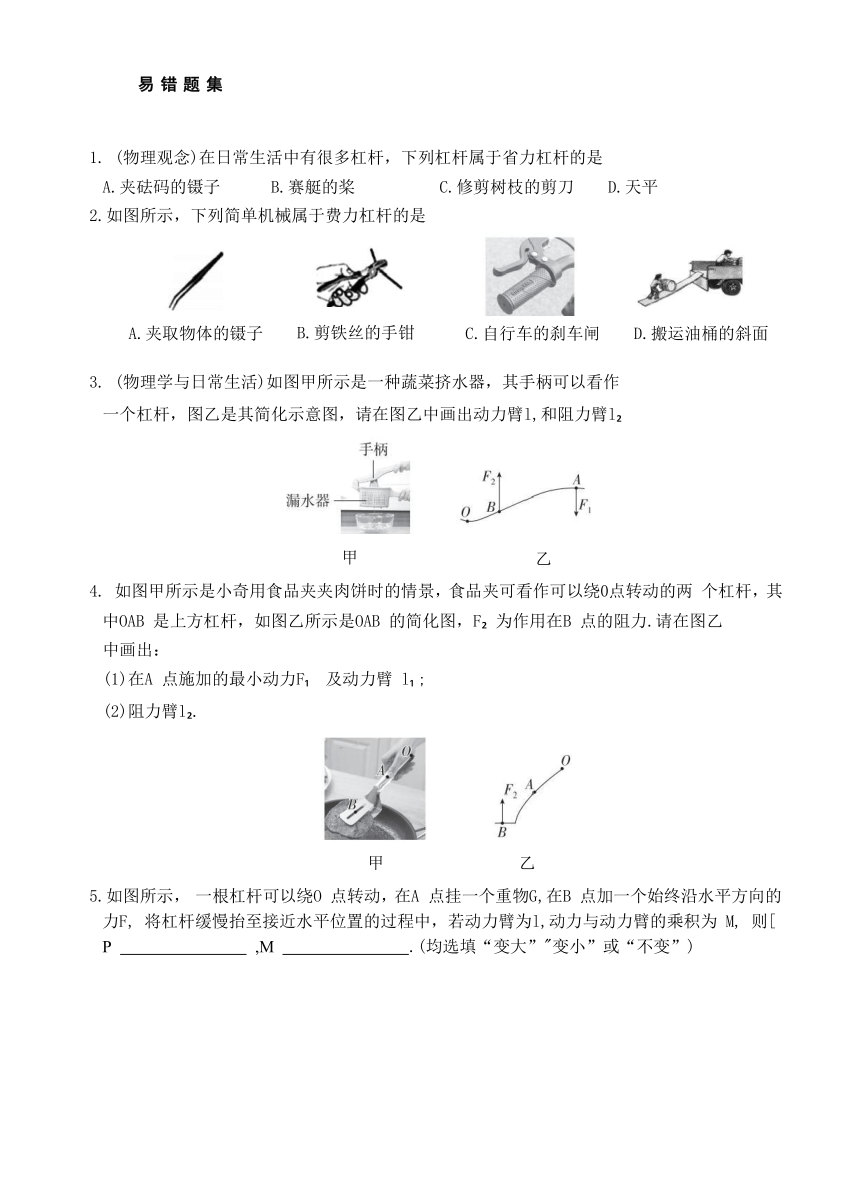
1. (物理观念)在日常生活中有很多杠杆,下列杠杆属于省力杠杆的是
A.夹砝码的镊子 B.赛艇的桨 C.修剪树枝的剪刀 D.天平
2.如图所示,下列简单机械属于费力杠杆的是
A.夹取物体的镊子 B.剪铁丝的手钳 C.自行车的刹车闸 D.搬运油桶的斜面
3. (物理学与日常生活)如图甲所示是一种蔬菜挤水器,其手柄可以看作
一个杠杆,图乙是其简化示意图,请在图乙中画出动力臂l,和阻力臂l
甲 乙
4. 如图甲所示是小奇用食品夹夹肉饼时的情景,食品夹可看作可以绕0点转动的两 个杠杆,其中OAB 是上方杠杆,如图乙所示是OAB 的简化图,F 为作用在B 点的阻力.请在图乙
中画出:
(1)在A 点施加的最小动力F 及动力臂 l ;
(2)阻力臂l .
甲 乙
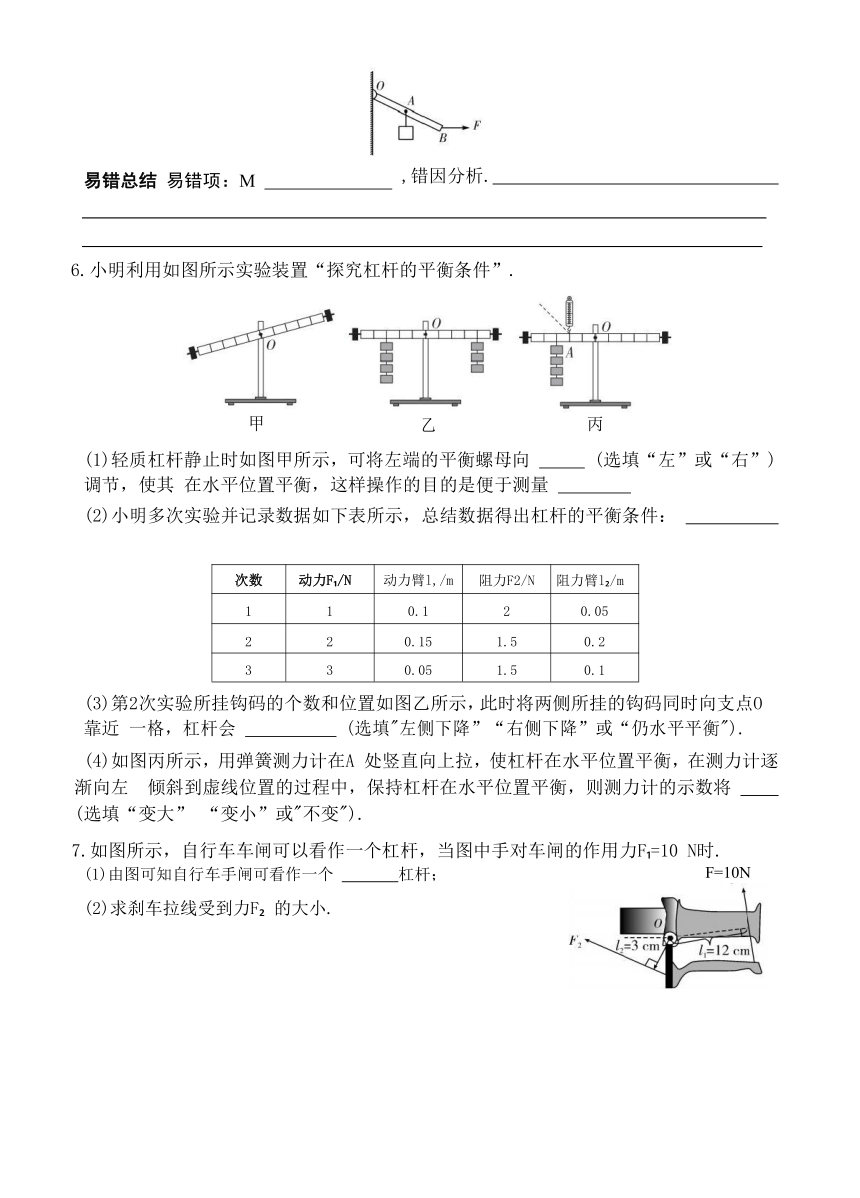
5.如图所示, 一根杠杆可以绕O 点转动,在A 点挂一个重物G,在B 点加一个始终沿水平方向的力F, 将杠杆缓慢抬至接近水平位置的过程中,若动力臂为l,动力与动力臂的乘积为 M, 则[ P ,M .(均选填“变大”"变小”或“不变”)
易错总结 易错项:M ,错因分析.
6.小明利用如图所示实验装置“探究杠杆的平衡条件”.
丙
(1)轻质杠杆静止时如图甲所示,可将左端的平衡螺母向 (选填“左”或“右”)调节,使其 在水平位置平衡,这样操作的目的是便于测量
(2)小明多次实验并记录数据如下表所示,总结数据得出杠杆的平衡条件:
次数 动力F /N 动力臂l,/m 阻力F2/N 阻力臂l /m
1 1 0.1 2 0.05
2 2 0.15 1.5 0.2
3 3 0.05 1.5 0.1
(3)第2次实验所挂钩码的个数和位置如图乙所示,此时将两侧所挂的钩码同时向支点O 靠近 一格,杠杆会 (选填"左侧下降”“右侧下降”或“仍水平平衡").
(4)如图丙所示,用弹簧测力计在A 处竖直向上拉,使杠杆在水平位置平衡,在测力计逐渐向左 倾斜到虚线位置的过程中,保持杠杆在水平位置平衡,则测力计的示数将 (选填“变大” “变小”或"不变").
7.如图所示,自行车车闸可以看作一个杠杆,当图中手对车闸的作用力F =10 N时.
(1)由图可知自行车手闸可看作一个 杠杆; F=10N
(2)求刹车拉线受到力F 的大小.
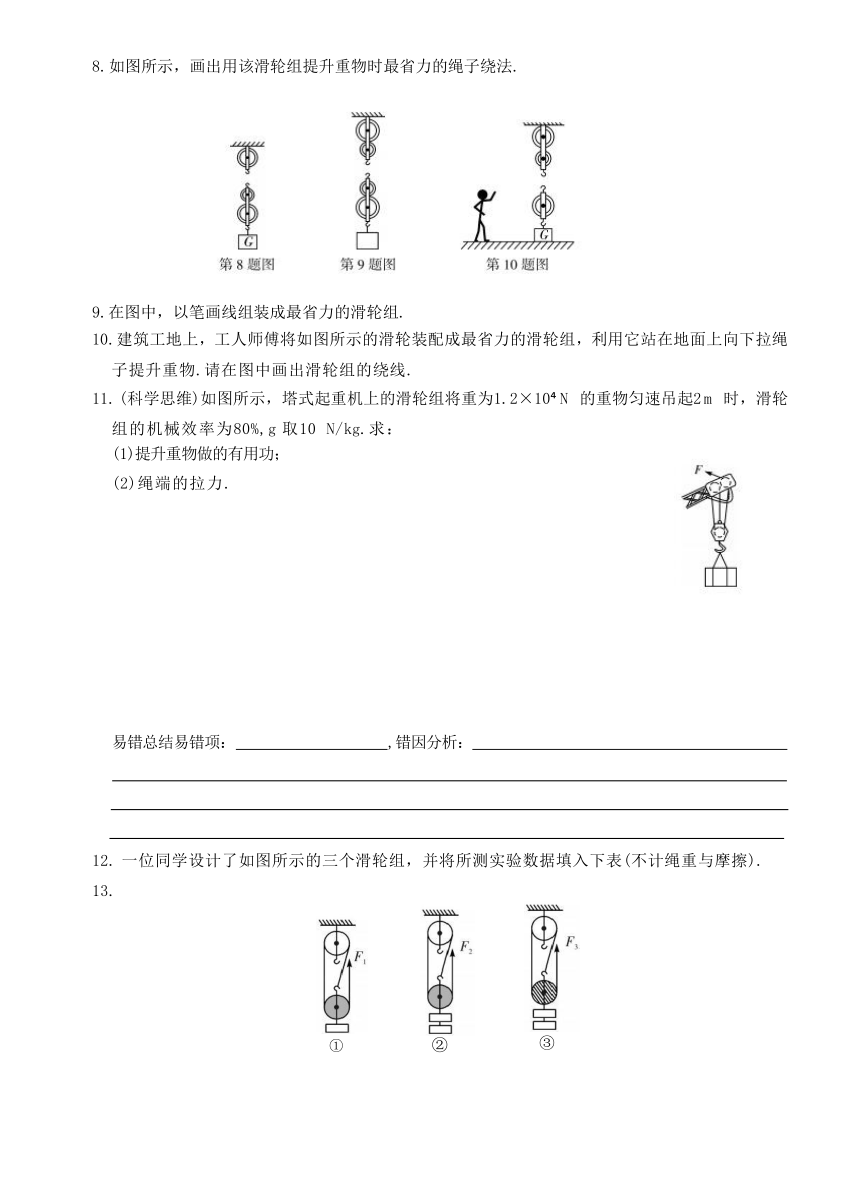
8. 如图所示,画出用该滑轮组提升重物时最省力的绳子绕法.
9.在图中,以笔画线组装成最省力的滑轮组.
10.建筑工地上,工人师傅将如图所示的滑轮装配成最省力的滑轮组,利用它站在地面上向下拉绳
子提升重物.请在图中画出滑轮组的绕线.
11. (科学思维)如图所示,塔式起重机上的滑轮组将重为1.2×10 N 的重物匀速吊起2 m 时,滑轮
组的机械效率为80%,g 取10 N/kg.求:
(1)提升重物做的有用功;
(2)绳端的拉力.
易错总结易错项: ,错因分析:
一位同学设计了如图所示的三个滑轮组,并将所测实验数据填入下表(不计绳重与摩擦).
③
实验次数 动滑轮重G动/N 钩码重G/N 动力F/N 机械效率
1 1 2 1.2
2 1 4 2
3 2 4 3
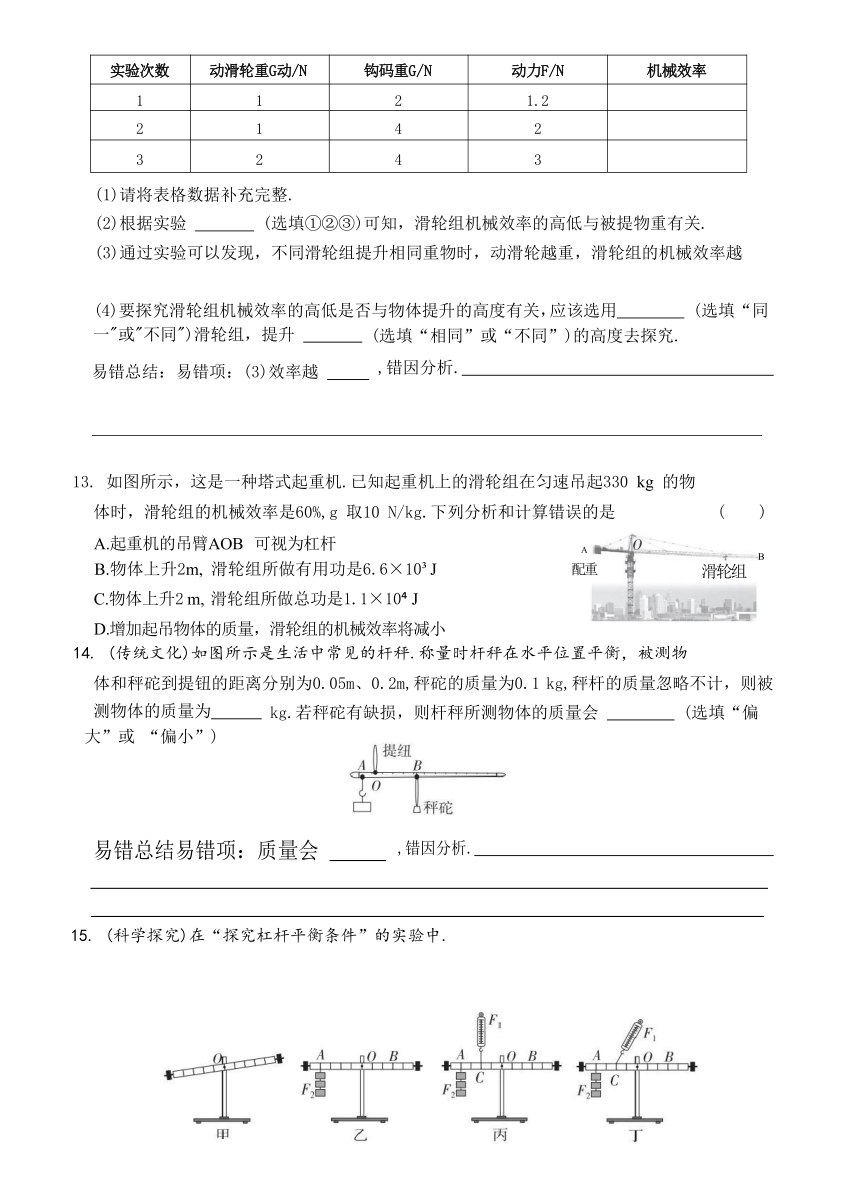
(1)请将表格数据补充完整.
(2)根据实验 (选填①②③)可知,滑轮组机械效率的高低与被提物重有关.
(3)通过实验可以发现,不同滑轮组提升相同重物时,动滑轮越重,滑轮组的机械效率越
(4)要探究滑轮组机械效率的高低是否与物体提升的高度有关,应该选用 (选填“同 一"或"不同")滑轮组,提升 (选填“相同”或“不同”)的高度去探究.
易错总结:易错项:(3)效率越 ,错因分析.
13. 如图所示,这是一种塔式起重机.已知起重机上的滑轮组在匀速吊起330 kg 的物
体时,滑轮组的机械效率是60%,g 取10 N/kg.下列分析和计算错误的是 ( )
14. (传统文化)如图所示是生活中常见的杆秤.称量时杆秤在水平位置平衡,被测物
体和秤砣到提钮的距离分别为0.05m、0.2m,秤砣的质量为0.1 kg,秤杆的质量忽略不计,则被
测物体的质量为 kg.若秤砣有缺损,则杆秤所测物体的质量会 (选填“偏大”或 “偏小”)
易错总结易错项:质量会 ,错因分析.
15. (科学探究)在“探究杠杆平衡条件”的实验中.
(1)如图甲所示,实验前杠杆左端下沉,则应将平衡螺母向 (选填“左”或“右”)调节, 直到杠杆在水平位置平衡.
(2)如图乙所示,杠杆上刻度均匀,在A 点挂3个钩码,要使杠杆在水平位置平衡,应在B 点挂 个相同的钩码;当杠杆平衡后,将A、B 两点下方同时增加一个相同的钩码,则杠杆将 (选填"左端下沉""右端下沉"或"仍保持静止不动").
(3)如图丙所示,若不在B 点挂钩码,改用弹簧测力计在C 点竖直向上拉杠杆,使杠杆在水平位 置平衡;当弹簧测力计从图丙位置转到图丁位置时,其示数会 (选填“变大”"不变”或 "变小"),原因是
16. 如图1所示从深井中匀速提取泥土,动滑轮和筐的总重力为30 N.图2是某次拉
力做的功 W 随绳子自由端拉下的长度s 变化的关系.不计绳重和摩擦,求:
图1 图2
(1)当s 为10m 时,由图2可知拉力做了 J 的功,筐和泥土上升了 m;
(2)拉力为 N,筐中泥土的重力是 N;
(3)本次利用该装置提升泥土的机械效率.
17. (物理学与工程实践)阅读下列短文,回答问题.
变速自行车的奥秘
变速自行车的变速系统是通过改变链条和不同的前、后大小的齿轮盘的配合来改变车速
快慢的.
如图1所示是变速自行车的驱动结构,它与普通自行车的区别在于它的后齿轮由多个半 径不同的齿轮共同组成(普通自行车的后齿轮只有一个).选择低挡位时,链条调整到半径较大 的齿轮上,选择高挡位时,链条调整到半径较小的齿轮上.
图1 图2
自行车的前齿轮和脚踏板构成一个轮轴型的省力杠杆结构,后齿轮和后车轮构成另一个 轮轴型的费力杠杆结构.骑自行车时,人踩脚踏板一圈,前齿轮跟着转动一圈,带动链条转动的 长度为前齿轮的周长.同时,链条带动后齿轮转动,由于后齿轮的半径小于前齿轮,为了保证链 条转动的长度相同,后齿轮转过的圈数必须大于前齿轮.后齿轮的半径越小,它转过的圈数就 越多.后齿轮同时带动后车轮转动,它们转动的圈数保持一致.因此,后齿轮越小,脚踩一圈,后 车轮转动的圈数越多,即自行车前进的距离越长.
在爬坡时,自行车受到的阻力较大,因此需要把后齿轮的半径(动力臂)调整得大一些,以 达到相对省力的效果.在下坡时,自行车受到的阻力较小,此时为了让自行车更快前进,可以将 后齿轮的半径调小.
(1)自行车驱动结构中,前齿轮和脚踏板构成一个 杠杆,后齿轮和后车轮构成一个 杠杆,
(2)请在图2中画出最省力时,人脚对脚踏板的力F (作用点在脚踏板中心),以及这个力对应 的力臂l.(提示:脚可以向各个方向用力踩脚踏板,脚踏板可以通过旋转来适应脚的用力方向.)
(3)爬坡时,应将链条调整至半径较 (选填“大”或“小”)的后齿轮上,从而达到相对省 力的目的.
(4)从自行车的结构和使用来看,它涉及的物理知识,下列说法正确的是 A.刹车时用力捏"刹车把"是通过增大压力来增大摩擦的
B.车座下方的弹簧受力越大,其弹性形变越小
C.自行车静止在水平地面上时,地面对自行车的支持力和自行车对地面的压力是一对平衡力
第十二章(简单机械)章末复习(参考答案)
思维导图
固定点 支点 动力 阻力 动力臂 阻力臂 动力x 动力臂=阻 力x阻力臂 F L =F 大于 小于 等于 等臂 力的方向
省力 距离 轮轴 斜面 省力 省力 有用功 额外功 总功
易错题集
1.C 2.A
3.如图所示
4. 如图所示
5.变小 变大 变大
易错总结:不变 学生判断l 变小,F变大,就认为 M=F ·l 不变. 根据图示可知,在力F 使杠杆从图中所示位置缓慢抬至接近水平 位置的过程中,重物的重力不变但力臂变大,所以G ·L 变大;由 杠杆平衡条件知M=G · lc,所以M 变大
6. (1)右 力臂 (2)动力x动力臂=阻力×阻力臂(或F A =F I )
(3)右侧下降 (4)变大
【解析】(1)杠杆如图甲所示,左端向下倾斜,则重心应向右移动, 故应向右调节左端或右端的平衡螺母,使杠杆在水平位置平衡, 便于我们直接读出力臂的大小.
(3)若一个钩码重G, 每一个小格长L, 如图乙所示,将两侧所挂的 钩码同时向支点 O 靠近一格,则左侧4G×2L=8GL,右侧3G×3L= 9GL,因为8GL<9GL,所以杠杆不能平衡,右侧下降.
(4)弹簧测力计逐渐向左倾斜拉杠杆,拉力的力臂变小,拉力变大,弹簧测力计的示数变大.
7. (1)省力
(2)解:根据杠杆平衡条件F L =F l 可得,拉线上的拉力
答:略.
8.如图所示
9.如图所示
10.如图所示
11.解:(1)提升重物做的有用功
W有=Gh=1.2×10 N×2m=2.4×10 J
(2)由 可得:拉力做的总功
由图可知,承担物重绳子的股数n=3, 则绳子自由端移动的距离
s=3h=3×2 m=6 m
由Wa=Fs 可得:拉力
答:(1)提升重物做的有用功为2.4×10 J;
(2)绳端的拉力为5000 N.
易错总结:拉力为4×10 N 学生没有考虑动滑轮的重力,直接
用公:计算拉力,造成错误.题中机械效率为80%就意味 着要考虑动滑轮重,所以正确方法是先求总功 ,然后求 拉力
12. (1)55.6% 66.7% 44.4% (2)①② (3)低 (4)同一
不同
易错总结:高 学生没有搞清楚克服动滑轮重做的是额外功,动 滑轮越重,代表克服其重力做的额外功越多,所以机械效率就 越低
13.D 【解析】吊臂AOB是可以在力的作用下绕0点转动的硬棒, 因此吊臂AOB 可视为杠杆,故 A 正确;物体的重力G=mg= 330kg×10 N/kg=3300 N,滑轮组所做有用功 W有= Ch=
3300 N×2m=6.6×10 J,故B 正确;由 ,滑轮组所做 总功 J, 故C 正确;若仅增加起吊物体的质量,起吊物体的重力变大,额外功不变,有用功变大,有 用功在总功中所占的比例变大,则滑轮组的机械效率变大,故D 错误.
14.0.4 偏大
易错总结:偏小 学生认为秤砣缺损,质量变小,所以被称的物 体质量也会偏小;其实,被称物体的质量和对应力臂不变,所以 G物 ·lon 不变,因为秤砣质量减小,所以其力臂lon要变大,其指 示的质量读数会偏大
【解析】如图所示,由杠杆平衡条件可知G ·OA=G ·OB, 即: .若秤 砣有缺损,则m 减小,而G ·OA 不变,所以OB要变大,杆秤所 示的质量值要偏大.
15.(1)右 (2)4 左端下沉 (3)变大 阻力和阻力臂不变,动力 臂变小,动力变大
【解析】(1)杠杆不在水平位置,左端向下倾斜,则重心应向右移 动,故应向右调节平衡螺母,
(2)若每个钩码重G, 每个小格长L, 如图乙所示,杠杆左边A 处 挂四个相同钩码,要使杠杆在水平位置平衡,根据杠杆的平衡条 件可得3G×4L=nG×3L,解得n=4, 即应在杠杆右边B 处挂4个 相同的钩码;当杠杆平衡后,在A、B 两点下方同时增加一个钩 码,则有4G×4L>5G×3L,即左侧力与力臂的乘积大于右侧,故左 端下沉.
(3)保持C点不变,当弹簧测力计从图丙位置转到图丁位置时, 此时F 的力臂变短,根据杠杆的平衡条件,阻力和阻力臂不变, 动力臂变小,则动力变大.
16. (1)1250 5
【解析】由图2可知,当 s为10 m 时,拉力做的功W=1250J;
由图1可知,滑轮组绳子的有效股数n=2, 由s=nh 可得,筐和泥 土上升的高度
(2)125 220
【解析】由W=Fs 可得,拉; N;因不计 绳重和摩擦,所以,由 可得,筐中泥土
的重力G泥土=nF-G 动滑轮和值=2×125 N-30 N=220 N.
(3)解:拉力做的有用功W右=G泥±h=220 N×5 m=1100J
则本次利用该装置提升泥土的机械效率,
答:略.
17.(1)省力 费力 (2)如图所示 (3)大 (4)A
【解析】(2)根据杠杆平衡条件可知,当动力臂最长时,需要的动 力是最小的,当F 垂直于同脚踏板相连的金属杆时最省力,如上
图所示.
(4)刹车时用力捏“刹车把”是在接触面粗糙程度一定时,通过 增大压力来增大摩擦力,故A 正确;车座下方的弹簧受力越大, 其弹性形变的程度也就越大,故B 错误;地面对自行车的支持力 和车对地面的压力,二力的大小相等、方向相反、作用在同一直 线上、作用在不同物体上,不是一对平衡力,而是一对相互作用 力,故 C 错误
1.杠杆:在力的作用下能绕着 转动的硬棒,它包括
五个要素.
2.杠杆的平衡条件: ,用公式表示是
省力杠杆:动力臂 阻力臂,能省力,但费距离;如瓶盖起子、核桃夹、钢丝钳等.
3.杠杆的分类{费力杠杆:动力臂 阻力臂,能省距离,但费力;如镊子、钓鱼竿、
理发剪刀等.
等臂杠杆:动力臂 阻力臂,既不省力也不省距离;如天平.
1.定滑轮.轴固定不动的滑轮,定滑轮实质是 杠杆,不省力,但能改变
2.动滑轮:轴随物体一起运动的滑轮.动滑轮实质是动力臂是阻力臂两倍的杠杆,能
,但要费
3.滑轮组:由定滑轮和动滑轮组合而成的装置.滑轮组的省力情况由绳子有效段数决定,
若不考虑动滑轮重和摩擦,则提起重为G 的物体所用拉力 ;若动滑轮重
为 G 动,则提起重为G 的物体所用的拉力
4.其他机械: .斜面是 机械,斜面越缓,越 ·
1. :对人们有用的功.
2. :不需要但不得不做的功.
3. :有用功和额外功之和.
4.机械效率:有用功跟总功的比值.机械效率的计算公式
易错题集
1. (物理观念)在日常生活中有很多杠杆,下列杠杆属于省力杠杆的是
A.夹砝码的镊子 B.赛艇的桨 C.修剪树枝的剪刀 D.天平
2.如图所示,下列简单机械属于费力杠杆的是
A.夹取物体的镊子 B.剪铁丝的手钳 C.自行车的刹车闸 D.搬运油桶的斜面
3. (物理学与日常生活)如图甲所示是一种蔬菜挤水器,其手柄可以看作
一个杠杆,图乙是其简化示意图,请在图乙中画出动力臂l,和阻力臂l
甲 乙
4. 如图甲所示是小奇用食品夹夹肉饼时的情景,食品夹可看作可以绕0点转动的两 个杠杆,其中OAB 是上方杠杆,如图乙所示是OAB 的简化图,F 为作用在B 点的阻力.请在图乙
中画出:
(1)在A 点施加的最小动力F 及动力臂 l ;
(2)阻力臂l .
甲 乙
5.如图所示, 一根杠杆可以绕O 点转动,在A 点挂一个重物G,在B 点加一个始终沿水平方向的力F, 将杠杆缓慢抬至接近水平位置的过程中,若动力臂为l,动力与动力臂的乘积为 M, 则[ P ,M .(均选填“变大”"变小”或“不变”)
易错总结 易错项:M ,错因分析.
6.小明利用如图所示实验装置“探究杠杆的平衡条件”.
丙
(1)轻质杠杆静止时如图甲所示,可将左端的平衡螺母向 (选填“左”或“右”)调节,使其 在水平位置平衡,这样操作的目的是便于测量
(2)小明多次实验并记录数据如下表所示,总结数据得出杠杆的平衡条件:
次数 动力F /N 动力臂l,/m 阻力F2/N 阻力臂l /m
1 1 0.1 2 0.05
2 2 0.15 1.5 0.2
3 3 0.05 1.5 0.1
(3)第2次实验所挂钩码的个数和位置如图乙所示,此时将两侧所挂的钩码同时向支点O 靠近 一格,杠杆会 (选填"左侧下降”“右侧下降”或“仍水平平衡").
(4)如图丙所示,用弹簧测力计在A 处竖直向上拉,使杠杆在水平位置平衡,在测力计逐渐向左 倾斜到虚线位置的过程中,保持杠杆在水平位置平衡,则测力计的示数将 (选填“变大” “变小”或"不变").
7.如图所示,自行车车闸可以看作一个杠杆,当图中手对车闸的作用力F =10 N时.
(1)由图可知自行车手闸可看作一个 杠杆; F=10N
(2)求刹车拉线受到力F 的大小.
8. 如图所示,画出用该滑轮组提升重物时最省力的绳子绕法.
9.在图中,以笔画线组装成最省力的滑轮组.
10.建筑工地上,工人师傅将如图所示的滑轮装配成最省力的滑轮组,利用它站在地面上向下拉绳
子提升重物.请在图中画出滑轮组的绕线.
11. (科学思维)如图所示,塔式起重机上的滑轮组将重为1.2×10 N 的重物匀速吊起2 m 时,滑轮
组的机械效率为80%,g 取10 N/kg.求:
(1)提升重物做的有用功;
(2)绳端的拉力.
易错总结易错项: ,错因分析:
一位同学设计了如图所示的三个滑轮组,并将所测实验数据填入下表(不计绳重与摩擦).
③
实验次数 动滑轮重G动/N 钩码重G/N 动力F/N 机械效率
1 1 2 1.2
2 1 4 2
3 2 4 3
(1)请将表格数据补充完整.
(2)根据实验 (选填①②③)可知,滑轮组机械效率的高低与被提物重有关.
(3)通过实验可以发现,不同滑轮组提升相同重物时,动滑轮越重,滑轮组的机械效率越
(4)要探究滑轮组机械效率的高低是否与物体提升的高度有关,应该选用 (选填“同 一"或"不同")滑轮组,提升 (选填“相同”或“不同”)的高度去探究.
易错总结:易错项:(3)效率越 ,错因分析.
13. 如图所示,这是一种塔式起重机.已知起重机上的滑轮组在匀速吊起330 kg 的物
体时,滑轮组的机械效率是60%,g 取10 N/kg.下列分析和计算错误的是 ( )
14. (传统文化)如图所示是生活中常见的杆秤.称量时杆秤在水平位置平衡,被测物
体和秤砣到提钮的距离分别为0.05m、0.2m,秤砣的质量为0.1 kg,秤杆的质量忽略不计,则被
测物体的质量为 kg.若秤砣有缺损,则杆秤所测物体的质量会 (选填“偏大”或 “偏小”)
易错总结易错项:质量会 ,错因分析.
15. (科学探究)在“探究杠杆平衡条件”的实验中.
(1)如图甲所示,实验前杠杆左端下沉,则应将平衡螺母向 (选填“左”或“右”)调节, 直到杠杆在水平位置平衡.
(2)如图乙所示,杠杆上刻度均匀,在A 点挂3个钩码,要使杠杆在水平位置平衡,应在B 点挂 个相同的钩码;当杠杆平衡后,将A、B 两点下方同时增加一个相同的钩码,则杠杆将 (选填"左端下沉""右端下沉"或"仍保持静止不动").
(3)如图丙所示,若不在B 点挂钩码,改用弹簧测力计在C 点竖直向上拉杠杆,使杠杆在水平位 置平衡;当弹簧测力计从图丙位置转到图丁位置时,其示数会 (选填“变大”"不变”或 "变小"),原因是
16. 如图1所示从深井中匀速提取泥土,动滑轮和筐的总重力为30 N.图2是某次拉
力做的功 W 随绳子自由端拉下的长度s 变化的关系.不计绳重和摩擦,求:
图1 图2
(1)当s 为10m 时,由图2可知拉力做了 J 的功,筐和泥土上升了 m;
(2)拉力为 N,筐中泥土的重力是 N;
(3)本次利用该装置提升泥土的机械效率.
17. (物理学与工程实践)阅读下列短文,回答问题.
变速自行车的奥秘
变速自行车的变速系统是通过改变链条和不同的前、后大小的齿轮盘的配合来改变车速
快慢的.
如图1所示是变速自行车的驱动结构,它与普通自行车的区别在于它的后齿轮由多个半 径不同的齿轮共同组成(普通自行车的后齿轮只有一个).选择低挡位时,链条调整到半径较大 的齿轮上,选择高挡位时,链条调整到半径较小的齿轮上.
图1 图2
自行车的前齿轮和脚踏板构成一个轮轴型的省力杠杆结构,后齿轮和后车轮构成另一个 轮轴型的费力杠杆结构.骑自行车时,人踩脚踏板一圈,前齿轮跟着转动一圈,带动链条转动的 长度为前齿轮的周长.同时,链条带动后齿轮转动,由于后齿轮的半径小于前齿轮,为了保证链 条转动的长度相同,后齿轮转过的圈数必须大于前齿轮.后齿轮的半径越小,它转过的圈数就 越多.后齿轮同时带动后车轮转动,它们转动的圈数保持一致.因此,后齿轮越小,脚踩一圈,后 车轮转动的圈数越多,即自行车前进的距离越长.
在爬坡时,自行车受到的阻力较大,因此需要把后齿轮的半径(动力臂)调整得大一些,以 达到相对省力的效果.在下坡时,自行车受到的阻力较小,此时为了让自行车更快前进,可以将 后齿轮的半径调小.
(1)自行车驱动结构中,前齿轮和脚踏板构成一个 杠杆,后齿轮和后车轮构成一个 杠杆,
(2)请在图2中画出最省力时,人脚对脚踏板的力F (作用点在脚踏板中心),以及这个力对应 的力臂l.(提示:脚可以向各个方向用力踩脚踏板,脚踏板可以通过旋转来适应脚的用力方向.)
(3)爬坡时,应将链条调整至半径较 (选填“大”或“小”)的后齿轮上,从而达到相对省 力的目的.
(4)从自行车的结构和使用来看,它涉及的物理知识,下列说法正确的是 A.刹车时用力捏"刹车把"是通过增大压力来增大摩擦的
B.车座下方的弹簧受力越大,其弹性形变越小
C.自行车静止在水平地面上时,地面对自行车的支持力和自行车对地面的压力是一对平衡力
第十二章(简单机械)章末复习(参考答案)
思维导图
固定点 支点 动力 阻力 动力臂 阻力臂 动力x 动力臂=阻 力x阻力臂 F L =F 大于 小于 等于 等臂 力的方向
省力 距离 轮轴 斜面 省力 省力 有用功 额外功 总功
易错题集
1.C 2.A
3.如图所示
4. 如图所示
5.变小 变大 变大
易错总结:不变 学生判断l 变小,F变大,就认为 M=F ·l 不变. 根据图示可知,在力F 使杠杆从图中所示位置缓慢抬至接近水平 位置的过程中,重物的重力不变但力臂变大,所以G ·L 变大;由 杠杆平衡条件知M=G · lc,所以M 变大
6. (1)右 力臂 (2)动力x动力臂=阻力×阻力臂(或F A =F I )
(3)右侧下降 (4)变大
【解析】(1)杠杆如图甲所示,左端向下倾斜,则重心应向右移动, 故应向右调节左端或右端的平衡螺母,使杠杆在水平位置平衡, 便于我们直接读出力臂的大小.
(3)若一个钩码重G, 每一个小格长L, 如图乙所示,将两侧所挂的 钩码同时向支点 O 靠近一格,则左侧4G×2L=8GL,右侧3G×3L= 9GL,因为8GL<9GL,所以杠杆不能平衡,右侧下降.
(4)弹簧测力计逐渐向左倾斜拉杠杆,拉力的力臂变小,拉力变大,弹簧测力计的示数变大.
7. (1)省力
(2)解:根据杠杆平衡条件F L =F l 可得,拉线上的拉力
答:略.
8.如图所示
9.如图所示
10.如图所示
11.解:(1)提升重物做的有用功
W有=Gh=1.2×10 N×2m=2.4×10 J
(2)由 可得:拉力做的总功
由图可知,承担物重绳子的股数n=3, 则绳子自由端移动的距离
s=3h=3×2 m=6 m
由Wa=Fs 可得:拉力
答:(1)提升重物做的有用功为2.4×10 J;
(2)绳端的拉力为5000 N.
易错总结:拉力为4×10 N 学生没有考虑动滑轮的重力,直接
用公:计算拉力,造成错误.题中机械效率为80%就意味 着要考虑动滑轮重,所以正确方法是先求总功 ,然后求 拉力
12. (1)55.6% 66.7% 44.4% (2)①② (3)低 (4)同一
不同
易错总结:高 学生没有搞清楚克服动滑轮重做的是额外功,动 滑轮越重,代表克服其重力做的额外功越多,所以机械效率就 越低
13.D 【解析】吊臂AOB是可以在力的作用下绕0点转动的硬棒, 因此吊臂AOB 可视为杠杆,故 A 正确;物体的重力G=mg= 330kg×10 N/kg=3300 N,滑轮组所做有用功 W有= Ch=
3300 N×2m=6.6×10 J,故B 正确;由 ,滑轮组所做 总功 J, 故C 正确;若仅增加起吊物体的质量,起吊物体的重力变大,额外功不变,有用功变大,有 用功在总功中所占的比例变大,则滑轮组的机械效率变大,故D 错误.
14.0.4 偏大
易错总结:偏小 学生认为秤砣缺损,质量变小,所以被称的物 体质量也会偏小;其实,被称物体的质量和对应力臂不变,所以 G物 ·lon 不变,因为秤砣质量减小,所以其力臂lon要变大,其指 示的质量读数会偏大
【解析】如图所示,由杠杆平衡条件可知G ·OA=G ·OB, 即: .若秤 砣有缺损,则m 减小,而G ·OA 不变,所以OB要变大,杆秤所 示的质量值要偏大.
15.(1)右 (2)4 左端下沉 (3)变大 阻力和阻力臂不变,动力 臂变小,动力变大
【解析】(1)杠杆不在水平位置,左端向下倾斜,则重心应向右移 动,故应向右调节平衡螺母,
(2)若每个钩码重G, 每个小格长L, 如图乙所示,杠杆左边A 处 挂四个相同钩码,要使杠杆在水平位置平衡,根据杠杆的平衡条 件可得3G×4L=nG×3L,解得n=4, 即应在杠杆右边B 处挂4个 相同的钩码;当杠杆平衡后,在A、B 两点下方同时增加一个钩 码,则有4G×4L>5G×3L,即左侧力与力臂的乘积大于右侧,故左 端下沉.
(3)保持C点不变,当弹簧测力计从图丙位置转到图丁位置时, 此时F 的力臂变短,根据杠杆的平衡条件,阻力和阻力臂不变, 动力臂变小,则动力变大.
16. (1)1250 5
【解析】由图2可知,当 s为10 m 时,拉力做的功W=1250J;
由图1可知,滑轮组绳子的有效股数n=2, 由s=nh 可得,筐和泥 土上升的高度
(2)125 220
【解析】由W=Fs 可得,拉; N;因不计 绳重和摩擦,所以,由 可得,筐中泥土
的重力G泥土=nF-G 动滑轮和值=2×125 N-30 N=220 N.
(3)解:拉力做的有用功W右=G泥±h=220 N×5 m=1100J
则本次利用该装置提升泥土的机械效率,
答:略.
17.(1)省力 费力 (2)如图所示 (3)大 (4)A
【解析】(2)根据杠杆平衡条件可知,当动力臂最长时,需要的动 力是最小的,当F 垂直于同脚踏板相连的金属杆时最省力,如上
图所示.
(4)刹车时用力捏“刹车把”是在接触面粗糙程度一定时,通过 增大压力来增大摩擦力,故A 正确;车座下方的弹簧受力越大, 其弹性形变的程度也就越大,故B 错误;地面对自行车的支持力 和车对地面的压力,二力的大小相等、方向相反、作用在同一直 线上、作用在不同物体上,不是一对平衡力,而是一对相互作用 力,故 C 错误