Scratch 编程-智能小车助力疫情物资配送(教案)六年级下册信息科技Scratch编程
文档属性
| 名称 | Scratch 编程-智能小车助力疫情物资配送(教案)六年级下册信息科技Scratch编程 |
|
|
| 格式 | docx | ||
| 文件大小 | 679.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2023-09-26 00:00:00 | ||
图片预览
文档简介
智能小车助力疫情物资配送
——巡线传感器的应用
单位名称 教材版本 人工智能(湖南教育出版社)
教师姓名 任教年级 六年级
一、学情分析
本课是面向小学六年级学生,六年级学生对知识的获取已经开始由感性认识提升到理性认识,已经具有一定的研究能力,喜欢新鲜事物,也愿意突破自己的固有认识。通过前几课的学习,学生已经掌握了通过Mind+软件搭建积木块控制小车直线巡线的方法,但是在实验过程中,部分学生产生疑惑:小车经常走不直,需要手动调整方向,且小车不会转弯,不够智能。
二、教学目标
信息意识: 认识巡线传感器;掌握小车巡线的原理与方法;理解转弯的原理,实现智能转弯。 计算思维: 利用巡线传感器的工作原理;探究小车巡线的方法,培养分析问题和解决问题的能力。 数字化学习创新: 养成探究习惯和创新意识,能够根据自己的实际需求,编写合适的编码来实现相应效果。 信息社会责任: 感受科技带来的便利,培养努力学习,化知识为力量的思想。
三、教学重点
1、巡线传感器的原理; 2、小车巡线的方法; 3、小车转弯。
四、教学难点
使用程序实现小车沿着矩形巡线地图智能巡线,在直线部分自动修正跑偏问题,且能正确转弯。
五、器材准备
智能小车、巡线地图、电脑、Mind+软件、用户库文件
六、教学过程
教学环节 教师活动 学生活动 设计意图
提出问题 疫情期间,小区封控,街道志愿者每天为配送各家各户的物资而忙碌不已。为了减轻志愿者工作量,实现无人配送,你有什么好点子? (学生头脑风暴:用机器人,建传送带,自动装卸货车、智能配送车等等) 大家集思广益,想出了这么多的金点子,哪一种是我们能运用以前学到的知识实现的呢?智能配送车。大家同意吗?今天这节课,我们就一起来设计一款能实现无人配送的智能小车。 (板书标题:智能小车助力疫情无人配送服务) 提出问题 头脑风暴 从生活中的问题入手,激发学生兴趣,明确学习目标。
制定方案 我们用一个地图模拟一下小区的环境,中间的黑色环形道路就是将物资配送到ABCD四栋楼的指定线路。 现在我们来将任务分解,想让配送车沿指定黑线行驶,首先它得看见什么?看见黑线。(板书:1. 怎样“看见”黑线) 光看见黑线就够了吗?怎样沿黑线行驶?还要编写程序给它赋予智能。(板书:2. 怎样沿黑线行驶) 制定方案 提出项目问题和问题分解
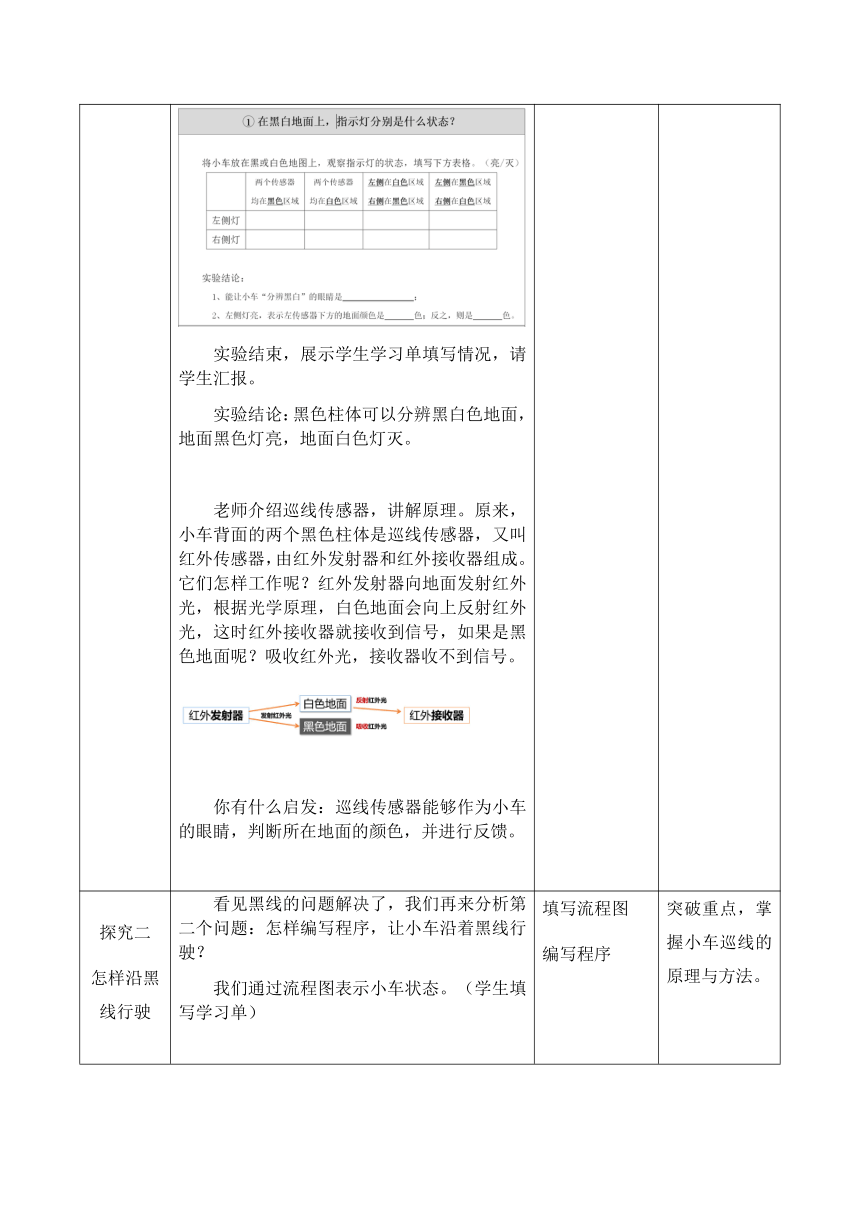
探究一 怎样“看见”黑线 首先来分析第一个任务。观察小车,猜猜能看见黑线的眼睛在哪?老师给大家一个提示,这双眼睛是朝下看的。 生回答 提出猜想:背面两个黑色柱体能看见黑线。 同学们觉得他分析的有没有道理?看来大家都很有信心,不过实践才是检验真理的唯一标准,我们现在就动手验证一下。 证实猜想:探究一 在黑白地面上,小车有什么变化?蓝色指示灯分别是什么状态? 两个传感器在黑白地面上有四种情况,分别实验。 (学生进行实验,填写学习单) 实验结束,展示学生学习单填写情况,请学生汇报。 实验结论:黑色柱体可以分辨黑白色地面,地面黑色灯亮,地面白色灯灭。 老师介绍巡线传感器,讲解原理。原来,小车背面的两个黑色柱体是巡线传感器,又叫红外传感器,由红外发射器和红外接收器组成。它们怎样工作呢?红外发射器向地面发射红外光,根据光学原理,白色地面会向上反射红外光,这时红外接收器就接收到信号,如果是黑色地面呢?吸收红外光,接收器收不到信号。 你有什么启发:巡线传感器能够作为小车的眼睛,判断所在地面的颜色,并进行反馈。 理解原理 通过对原理的理解,有利于实践中的应用。
探究二 怎样沿黑线行驶 看见黑线的问题解决了,我们再来分析第二个问题:怎样编写程序,让小车沿着黑线行驶? 我们通过流程图表示小车状态。(学生填写学习单) 指生汇报,PPT左边出示流程图,右边出示可用积木块。师:在mind+中,我们需要借助......来判断小车是否碰到黑色,用......来控制小车前进。 如果那么否则 那里也要优化一下。
现在我们有两个条件,就需要用到如果 那么 否则模块。两个传感器都在黑色区域,可以对应积木代码: 。而前进的积木代码老师建议大家将速度设置为50,这样既安全又有效率。那如果是停止同学们可以将速度设置为多少? 请自行尝试搭建积木块,连接小车上传代码,放在地图上进行尝试吧。一人操作,一人记录。如果遇到了问题,可以使用小锦囊来提供帮助哦。(提示注意点击小三角形选择下拉框中的选项) 填写流程图 编写程序 突破重点,掌握小车巡线的原理与方法。
发现问题 在测试中发现问题:小车容易跑偏,经常卡住不动,这样虽然安全了,但并不智能。按照我们的程序设计,小车应该直线行进,为什么会这样? 老师提示,左右电机、轮胎、地面、最初摆放的位置不正都有细微的差别。所以小车偏离直线在所难免,那要怎么样才能让它变得更智能,准确的沿着我们规定的线路行进呢? 提出挑战:让小车变得更智能,自动回正。 总结出现的问题 问题改进
智能转弯 首先我们来分析问题: 小车在黑线上“跑偏”了,就会停下,此时它的两个巡线传感器分别在什么位置?我们用两个点表示左右传感器,理想状态是:两个红点一直在黑色线内向前走;请你帮我标出当向左跑偏了,和向右跑偏了的红点位置。 现在需要让小车回正: 偏左了怎么办?(向右转直到回正) 偏右了怎么办?(向左转直到回正) 我们可以把刚才的回正思路进行总结: 1判断哪边跑出到白色区域(可由巡线传感器灯灭看到) 2执行左转/右转,直到两边均回到黑色区域 第一个判断可以由哪边指示灯灭看到,那第二个转弯怎么办呢? 提问:小车如何实现转弯? 以团体游戏“旋风跑”为切入点:转弯时,越内侧队员速度越慢,越外侧队员速度越快。 应用到小车上也是如此。 启发:通过左右轮的速度差能够实现转弯 优化流程图 将流程图转化成积木代码 再测试,我们又发现了问题:转弯幅度不够大,无法沿着地图弯道转弯。 提问,思考,得到启发:两个轮胎的速度差越大,转弯幅度也就越大。 再次修改积木代码进行测试。寻找更合适的速度差值 小组之间相互展示学习。评价:有的小车在回正时速度更快,为什么?(更合适的左右轮速度差) 分析问题 理解转弯的实现原理 实现角度更大的转弯 理解转弯的原理,实现智能转弯。 调整参数,实现角度更大的转弯效果
拓展 在今天的探究活动中,我们的智能小车通过红外线传感器来感知地面颜色,通过程序控制小车车轮的电机转速让小车前进,停止、转弯,从而实现小车的自动巡航。如果我们掌握了这个设计原理,我们也可以设计出更多功能的机器人。 想一想,你还想让你的小车增加什么样的功能呢? 思考
总结 各位同学,通过今天的课程,我们发现其实人工智能离我们的生活非常的近,人工智能技术也不是高不可攀,以后的课程中我们将学习更多的人工智能的知识,亲爱的同学们,中国的未来在你们新生一代,期待你们努力学习,用自己的知识与智慧为社会贡献力量。 情境升华
板书设计
——巡线传感器的应用
单位名称 教材版本 人工智能(湖南教育出版社)
教师姓名 任教年级 六年级
一、学情分析
本课是面向小学六年级学生,六年级学生对知识的获取已经开始由感性认识提升到理性认识,已经具有一定的研究能力,喜欢新鲜事物,也愿意突破自己的固有认识。通过前几课的学习,学生已经掌握了通过Mind+软件搭建积木块控制小车直线巡线的方法,但是在实验过程中,部分学生产生疑惑:小车经常走不直,需要手动调整方向,且小车不会转弯,不够智能。
二、教学目标
信息意识: 认识巡线传感器;掌握小车巡线的原理与方法;理解转弯的原理,实现智能转弯。 计算思维: 利用巡线传感器的工作原理;探究小车巡线的方法,培养分析问题和解决问题的能力。 数字化学习创新: 养成探究习惯和创新意识,能够根据自己的实际需求,编写合适的编码来实现相应效果。 信息社会责任: 感受科技带来的便利,培养努力学习,化知识为力量的思想。
三、教学重点
1、巡线传感器的原理; 2、小车巡线的方法; 3、小车转弯。
四、教学难点
使用程序实现小车沿着矩形巡线地图智能巡线,在直线部分自动修正跑偏问题,且能正确转弯。
五、器材准备
智能小车、巡线地图、电脑、Mind+软件、用户库文件
六、教学过程
教学环节 教师活动 学生活动 设计意图
提出问题 疫情期间,小区封控,街道志愿者每天为配送各家各户的物资而忙碌不已。为了减轻志愿者工作量,实现无人配送,你有什么好点子? (学生头脑风暴:用机器人,建传送带,自动装卸货车、智能配送车等等) 大家集思广益,想出了这么多的金点子,哪一种是我们能运用以前学到的知识实现的呢?智能配送车。大家同意吗?今天这节课,我们就一起来设计一款能实现无人配送的智能小车。 (板书标题:智能小车助力疫情无人配送服务) 提出问题 头脑风暴 从生活中的问题入手,激发学生兴趣,明确学习目标。
制定方案 我们用一个地图模拟一下小区的环境,中间的黑色环形道路就是将物资配送到ABCD四栋楼的指定线路。 现在我们来将任务分解,想让配送车沿指定黑线行驶,首先它得看见什么?看见黑线。(板书:1. 怎样“看见”黑线) 光看见黑线就够了吗?怎样沿黑线行驶?还要编写程序给它赋予智能。(板书:2. 怎样沿黑线行驶) 制定方案 提出项目问题和问题分解
探究一 怎样“看见”黑线 首先来分析第一个任务。观察小车,猜猜能看见黑线的眼睛在哪?老师给大家一个提示,这双眼睛是朝下看的。 生回答 提出猜想:背面两个黑色柱体能看见黑线。 同学们觉得他分析的有没有道理?看来大家都很有信心,不过实践才是检验真理的唯一标准,我们现在就动手验证一下。 证实猜想:探究一 在黑白地面上,小车有什么变化?蓝色指示灯分别是什么状态? 两个传感器在黑白地面上有四种情况,分别实验。 (学生进行实验,填写学习单) 实验结束,展示学生学习单填写情况,请学生汇报。 实验结论:黑色柱体可以分辨黑白色地面,地面黑色灯亮,地面白色灯灭。 老师介绍巡线传感器,讲解原理。原来,小车背面的两个黑色柱体是巡线传感器,又叫红外传感器,由红外发射器和红外接收器组成。它们怎样工作呢?红外发射器向地面发射红外光,根据光学原理,白色地面会向上反射红外光,这时红外接收器就接收到信号,如果是黑色地面呢?吸收红外光,接收器收不到信号。 你有什么启发:巡线传感器能够作为小车的眼睛,判断所在地面的颜色,并进行反馈。 理解原理 通过对原理的理解,有利于实践中的应用。
探究二 怎样沿黑线行驶 看见黑线的问题解决了,我们再来分析第二个问题:怎样编写程序,让小车沿着黑线行驶? 我们通过流程图表示小车状态。(学生填写学习单) 指生汇报,PPT左边出示流程图,右边出示可用积木块。师:在mind+中,我们需要借助......来判断小车是否碰到黑色,用......来控制小车前进。 如果那么否则 那里也要优化一下。
现在我们有两个条件,就需要用到如果 那么 否则模块。两个传感器都在黑色区域,可以对应积木代码: 。而前进的积木代码老师建议大家将速度设置为50,这样既安全又有效率。那如果是停止同学们可以将速度设置为多少? 请自行尝试搭建积木块,连接小车上传代码,放在地图上进行尝试吧。一人操作,一人记录。如果遇到了问题,可以使用小锦囊来提供帮助哦。(提示注意点击小三角形选择下拉框中的选项) 填写流程图 编写程序 突破重点,掌握小车巡线的原理与方法。
发现问题 在测试中发现问题:小车容易跑偏,经常卡住不动,这样虽然安全了,但并不智能。按照我们的程序设计,小车应该直线行进,为什么会这样? 老师提示,左右电机、轮胎、地面、最初摆放的位置不正都有细微的差别。所以小车偏离直线在所难免,那要怎么样才能让它变得更智能,准确的沿着我们规定的线路行进呢? 提出挑战:让小车变得更智能,自动回正。 总结出现的问题 问题改进
智能转弯 首先我们来分析问题: 小车在黑线上“跑偏”了,就会停下,此时它的两个巡线传感器分别在什么位置?我们用两个点表示左右传感器,理想状态是:两个红点一直在黑色线内向前走;请你帮我标出当向左跑偏了,和向右跑偏了的红点位置。 现在需要让小车回正: 偏左了怎么办?(向右转直到回正) 偏右了怎么办?(向左转直到回正) 我们可以把刚才的回正思路进行总结: 1判断哪边跑出到白色区域(可由巡线传感器灯灭看到) 2执行左转/右转,直到两边均回到黑色区域 第一个判断可以由哪边指示灯灭看到,那第二个转弯怎么办呢? 提问:小车如何实现转弯? 以团体游戏“旋风跑”为切入点:转弯时,越内侧队员速度越慢,越外侧队员速度越快。 应用到小车上也是如此。 启发:通过左右轮的速度差能够实现转弯 优化流程图 将流程图转化成积木代码 再测试,我们又发现了问题:转弯幅度不够大,无法沿着地图弯道转弯。 提问,思考,得到启发:两个轮胎的速度差越大,转弯幅度也就越大。 再次修改积木代码进行测试。寻找更合适的速度差值 小组之间相互展示学习。评价:有的小车在回正时速度更快,为什么?(更合适的左右轮速度差) 分析问题 理解转弯的实现原理 实现角度更大的转弯 理解转弯的原理,实现智能转弯。 调整参数,实现角度更大的转弯效果
拓展 在今天的探究活动中,我们的智能小车通过红外线传感器来感知地面颜色,通过程序控制小车车轮的电机转速让小车前进,停止、转弯,从而实现小车的自动巡航。如果我们掌握了这个设计原理,我们也可以设计出更多功能的机器人。 想一想,你还想让你的小车增加什么样的功能呢? 思考
总结 各位同学,通过今天的课程,我们发现其实人工智能离我们的生活非常的近,人工智能技术也不是高不可攀,以后的课程中我们将学习更多的人工智能的知识,亲爱的同学们,中国的未来在你们新生一代,期待你们努力学习,用自己的知识与智慧为社会贡献力量。 情境升华
板书设计
同课章节目录