小学信息技术 通用版Scratch趣味编程 自动巡回车 课件(共11张PPT)
文档属性
| 名称 | 小学信息技术 通用版Scratch趣味编程 自动巡回车 课件(共11张PPT) |

|
|
| 格式 | pptx | ||
| 文件大小 | 1.2MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2023-10-18 00:00:00 | ||
图片预览
文档简介
(共11张PPT)
自动巡线无人车
杨老师
目录
1、情景导入
2、程序要求
3、完整程序
4、课后作业
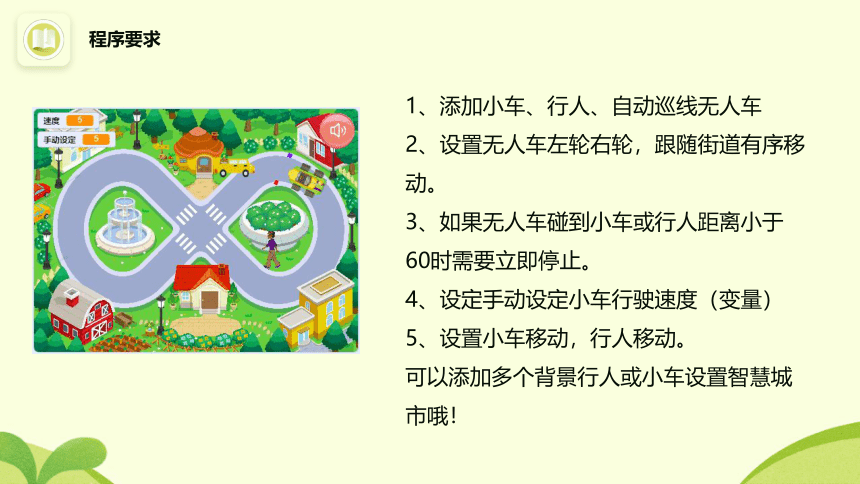
1、添加小车、行人、自动巡线无人车
2、设置无人车左轮右轮,跟随街道有序移动。
3、如果无人车碰到小车或行人距离小于60时需要立即停止。
4、设定手动设定小车行驶速度(变量)
5、设置小车移动,行人移动。
可以添加多个背景行人或小车设置智慧城市哦!
程序要求
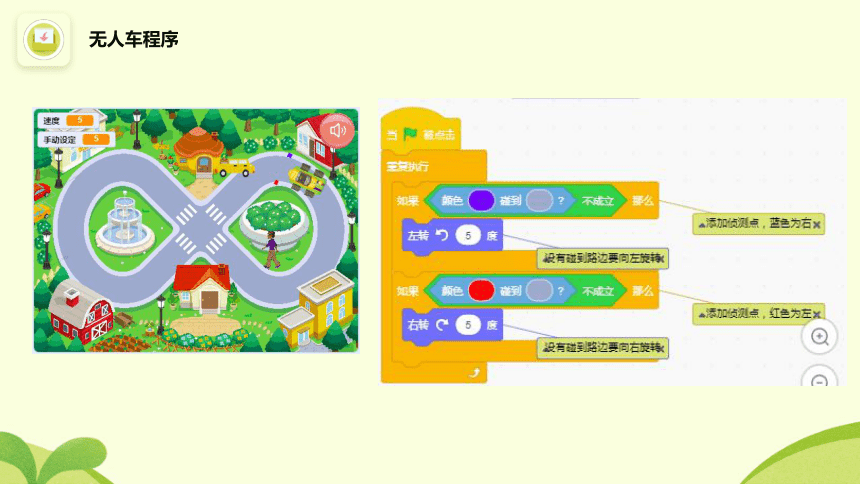
无人车程序
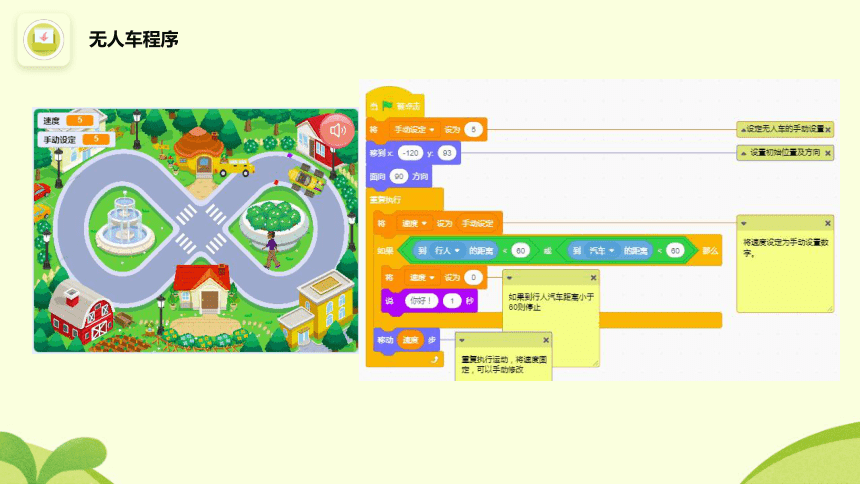
无人车程序
小车程序
行人程序
自动驾驶汽车(Autonomous vehicles;Self-driving automobile )又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。在20世纪已有数十年的历史,21世纪初呈现出接近实用化的趋势。
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
生活常识
作业
作业
作业
JP1O1教育PPT
JP1O1教育PPT
JP1O1教育PPT
P19骏育
0
速度
5
d的
手动设定
5
X7
当被点击
三安执行
如果
颇色
碰到
2
不成立
那么
一添加侦测点,蓝色为右×
左转
5
设有碰到路边要向左旋潮
如果
颜色
碰到
不成立
那么
添加侦测点,红色为左X
右转
5
设有碰到路边要向右旋嫩
当州被点击
将
手动说定。
设为
5
▲设定无人车的手动设置X
移到x
120
y
93
◆设于初始位置及方向X
面向
90
方向
三安执行
将
速度”
设为手动说定
将速妾设定为手动设工数
如果
到
行人。的距离
60
到汽车。的距离
<60
那么
字。
将
速度”
说为
说
你好!
1
秒
如果到行人汽车距奢小于
60则停止
移动
迪度步
+
三汽执行运动,将速废固国
定,可以手动修改
当被点击
将旋转方式设为
左右翻转、
添旋转方式,不然车会
到若
三安执行
面向
90
方向
移到X
56
73
在
1.5
秒内溶行到x
187
92
移壁房子
秒
面向
-90
方向
移到X
109
92
在
1.5
秒内滑行到x
-35
y
73
▲回到中间红房子位五
特特
秒
当W被点击
执行
使行人一直走动
下一个选型
特0.1秒
快步走速废就快
当被点击
移到绿
面、
移到x
14
y
93
中间红房子
三安执行
面向
90
方向
在
3
秒内滑行到x
131
-8
移动到花坛
面向
-90
方向
在
3
秒内滑行到x
17
y
-125
面向左移到红房子
面向
90
方向
在
3
秒内滑行到x
131
y
-8
回到花坛
面向
-90
方向
在
3
秒内滑行到x
14
93
回到中间黄色房子
自动巡线无人车
杨老师
目录
1、情景导入
2、程序要求
3、完整程序
4、课后作业
1、添加小车、行人、自动巡线无人车
2、设置无人车左轮右轮,跟随街道有序移动。
3、如果无人车碰到小车或行人距离小于60时需要立即停止。
4、设定手动设定小车行驶速度(变量)
5、设置小车移动,行人移动。
可以添加多个背景行人或小车设置智慧城市哦!
程序要求
无人车程序
无人车程序
小车程序
行人程序
自动驾驶汽车(Autonomous vehicles;Self-driving automobile )又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。在20世纪已有数十年的历史,21世纪初呈现出接近实用化的趋势。
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
生活常识
作业
作业
作业
JP1O1教育PPT
JP1O1教育PPT
JP1O1教育PPT
P19骏育
0
速度
5
d的
手动设定
5
X7
当被点击
三安执行
如果
颇色
碰到
2
不成立
那么
一添加侦测点,蓝色为右×
左转
5
设有碰到路边要向左旋潮
如果
颜色
碰到
不成立
那么
添加侦测点,红色为左X
右转
5
设有碰到路边要向右旋嫩
当州被点击
将
手动说定。
设为
5
▲设定无人车的手动设置X
移到x
120
y
93
◆设于初始位置及方向X
面向
90
方向
三安执行
将
速度”
设为手动说定
将速妾设定为手动设工数
如果
到
行人。的距离
60
到汽车。的距离
<60
那么
字。
将
速度”
说为
说
你好!
1
秒
如果到行人汽车距奢小于
60则停止
移动
迪度步
+
三汽执行运动,将速废固国
定,可以手动修改
当被点击
将旋转方式设为
左右翻转、
添旋转方式,不然车会
到若
三安执行
面向
90
方向
移到X
56
73
在
1.5
秒内溶行到x
187
92
移壁房子
秒
面向
-90
方向
移到X
109
92
在
1.5
秒内滑行到x
-35
y
73
▲回到中间红房子位五
特特
秒
当W被点击
执行
使行人一直走动
下一个选型
特0.1秒
快步走速废就快
当被点击
移到绿
面、
移到x
14
y
93
中间红房子
三安执行
面向
90
方向
在
3
秒内滑行到x
131
-8
移动到花坛
面向
-90
方向
在
3
秒内滑行到x
17
y
-125
面向左移到红房子
面向
90
方向
在
3
秒内滑行到x
131
y
-8
回到花坛
面向
-90
方向
在
3
秒内滑行到x
14
93
回到中间黄色房子
同课章节目录