苏科版六年级全一册信息技术 第4课 机器人沿线行走 课件(共15张PPT)
文档属性
| 名称 | 苏科版六年级全一册信息技术 第4课 机器人沿线行走 课件(共15张PPT) |

|
|
| 格式 | pptx | ||
| 文件大小 | 1.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2023-12-04 00:00:00 | ||
图片预览





文档简介
(共15张PPT)
机器人行走
苏科版小学信息技术六年级
前进
(直行)
停止
后退
转弯
(左转、右转)
第7课 机器人沿线行走
苏科版小学信息技术六年级
2
3
(正面俯视 左AD3 右AD2)
两个灰度传感器位置
编写程序,测出轨迹图上白色区域和黑线的灰度值,并在表格1内填上相应的数据。
中间值 =
(黑白灰度值分界点)
600
活动一:复习
课本P45流程图
无偏离
机器人向左偏
机器人右偏
有偏离
开始
纠正后
继续前进
机器人完全左偏
机器人完全右偏
机器人与
黑线的关系
传感器左偏
传感器右偏
传感器完全左偏
传感器完全右偏
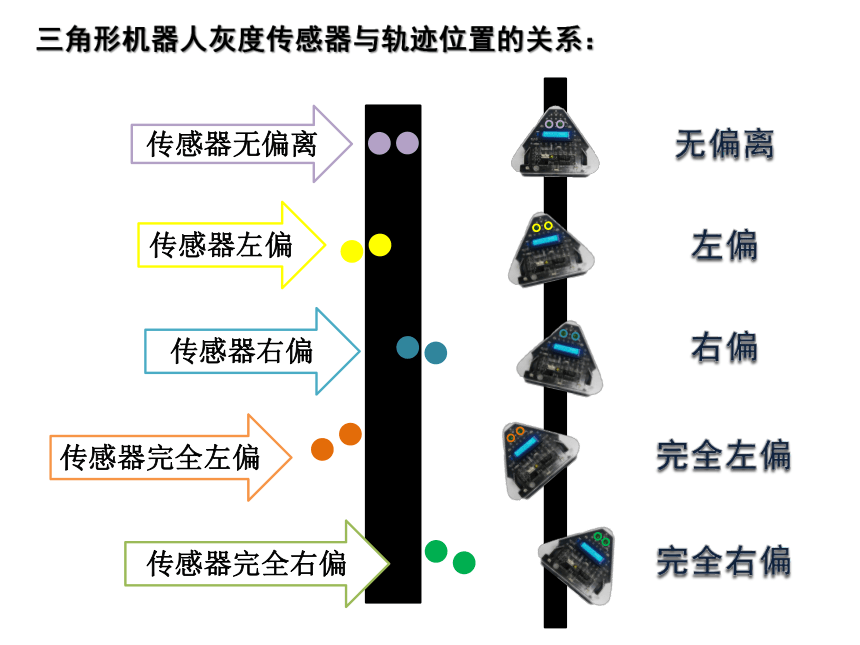
三角形机器人灰度传感器与轨迹位置的关系:
无偏离
左偏
传感器无偏离
右偏
完全左偏
完全右偏
简化流程图
无偏离
开始
继续前
进
往右偏离
往左纠正
往左偏离
往右纠正
完全左偏
往右纠正
完全右偏
往右纠正
灰度传感器值 与中间值比较 直流电机1(左) 直流电机2(右)
AD3(左) AD2(右) 转 向 速 度 转 向 速 度
无偏离
<=600
<=600
正转
正转
20
20
1、分析机器人“无偏离”运动,填写表格2中“无偏离”对应数据,并完成相应程序。
活动二
灰度传感器值 与中间值比较 直流电机1(左) 直流电机2(右)
AD3(左) AD2(右) 转 向 速 度 转 向 速 度
左 偏
>600
<=600
正转
停止
20
——
活动二
2、分析机器人“左偏”运动,填写表格2中“左偏”对应数据,并完成相应程序。
灰度传感器值 与中间值比较 直流电机1(左) 直流电机2(右)
AD3(左) AD2(右) 转 向 速 度 转 向 速 度
右 偏
<=600
>600
停止
正转
——
20
活动二
3、分析机器人“右偏”运动,填写表格2中“右偏”对应数据,并完成相应程序。
无偏离
左偏
右偏
测
灰
度
将程序保存、编译、下载后,在圆形轨迹图上进行测试。
弧度较小 路线简单 相对稳定
部分常用轨迹图
超级轨迹赛图
流程图
无偏离
开始
继续前
进
往右偏离
往左纠正
往左偏离
往右纠正
完全左偏
往右纠正
完全右偏
往右纠正
谢 谢
机器人行走
苏科版小学信息技术六年级
前进
(直行)
停止
后退
转弯
(左转、右转)
第7课 机器人沿线行走
苏科版小学信息技术六年级
2
3
(正面俯视 左AD3 右AD2)
两个灰度传感器位置
编写程序,测出轨迹图上白色区域和黑线的灰度值,并在表格1内填上相应的数据。
中间值 =
(黑白灰度值分界点)
600
活动一:复习
课本P45流程图
无偏离
机器人向左偏
机器人右偏
有偏离
开始
纠正后
继续前进
机器人完全左偏
机器人完全右偏
机器人与
黑线的关系
传感器左偏
传感器右偏
传感器完全左偏
传感器完全右偏
三角形机器人灰度传感器与轨迹位置的关系:
无偏离
左偏
传感器无偏离
右偏
完全左偏
完全右偏
简化流程图
无偏离
开始
继续前
进
往右偏离
往左纠正
往左偏离
往右纠正
完全左偏
往右纠正
完全右偏
往右纠正
灰度传感器值 与中间值比较 直流电机1(左) 直流电机2(右)
AD3(左) AD2(右) 转 向 速 度 转 向 速 度
无偏离
<=600
<=600
正转
正转
20
20
1、分析机器人“无偏离”运动,填写表格2中“无偏离”对应数据,并完成相应程序。
活动二
灰度传感器值 与中间值比较 直流电机1(左) 直流电机2(右)
AD3(左) AD2(右) 转 向 速 度 转 向 速 度
左 偏
>600
<=600
正转
停止
20
——
活动二
2、分析机器人“左偏”运动,填写表格2中“左偏”对应数据,并完成相应程序。
灰度传感器值 与中间值比较 直流电机1(左) 直流电机2(右)
AD3(左) AD2(右) 转 向 速 度 转 向 速 度
右 偏
<=600
>600
停止
正转
——
20
活动二
3、分析机器人“右偏”运动,填写表格2中“右偏”对应数据,并完成相应程序。
无偏离
左偏
右偏
测
灰
度
将程序保存、编译、下载后,在圆形轨迹图上进行测试。
弧度较小 路线简单 相对稳定
部分常用轨迹图
超级轨迹赛图
流程图
无偏离
开始
继续前
进
往右偏离
往左纠正
往左偏离
往右纠正
完全左偏
往右纠正
完全右偏
往右纠正
谢 谢