苏科版六年级全一册信息技术 第7课机器人沿线行走(教案)
文档属性
| 名称 | 苏科版六年级全一册信息技术 第7课机器人沿线行走(教案) |
|
|
| 格式 | docx | ||
| 文件大小 | 1.8MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2023-12-04 00:00:00 | ||
图片预览
文档简介
机器人沿线行走(第1课时)
【教学目标】
知识与技能:
让学生了解机器人可以沿线行走;了解灰度传感器的工作原理;了解机器人行走的五种情况(无偏离、左偏、右偏、完全左偏、完全右偏);学会编写机器人沿轨迹线行走程序。
过程与方法:
让学生通过感受、测试、分析等方法,掌握灰度传感器的使用和分支结构程序的条件判断。
情感态度与价值观:
让学生感受到机器人的智能,感受到机器人沿线行走在生活中的重要应用。
【重点难点】
重点:学会在系统设置中添加和设置灰度传感器;学会检测学生机器人向左偏、向右偏、完全左偏、完全右偏;学会编写机器人沿轨迹线行走程序。
难点:灰度传感器数值的理解,五种行走情况的条件判断。
【教学过程】
一.导入
1、从机器人行走入手,回忆机器人行走与电机转动的关系。
师:前面的学习中我们已经学过机器人的行走,你们知道机器人的行走有哪些方式?
如果想让机器人直行、左转、右转,对直流电机有什么要求?
2、观看机器人沿直线行走的视频,了解和体会机器人如何沿以下几种类型的线走。
师:看来同学们前面的知识学得都很扎实,老师这里给大家分享两个机器人的行走视频。同学们要仔细观察,然后告诉老师这两个机器人的行走方式跟之前学习的有什么不一样的地方?
师:这几个机器人是如何行走的?
今天我们就一起来学习机器人沿线行走。(出示课题)
师:刚才的视频中我们看到机器人沿着线走,你知道它是如何找到线的?
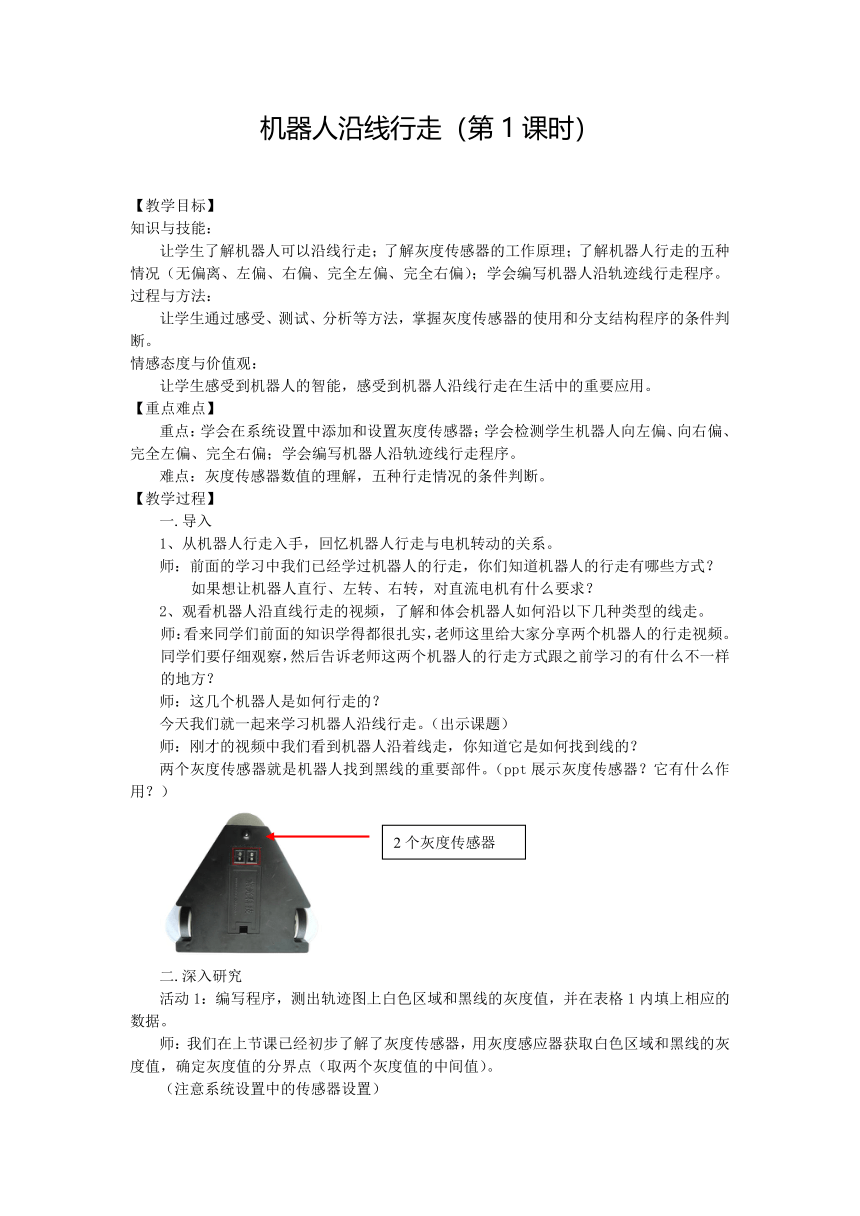
两个灰度传感器就是机器人找到黑线的重要部件。(ppt展示灰度传感器?它有什么作用?)
二.深入研究
活动1:编写程序,测出轨迹图上白色区域和黑线的灰度值,并在表格1内填上相应的数据。
师:我们在上节课已经初步了解了灰度传感器,用灰度感应器获取白色区域和黑线的灰度值,确定灰度值的分界点(取两个灰度值的中间值)。
(注意系统设置中的传感器设置)
学生复习,教师指导(可找学生上前来做)
完成表格1:
灰度3传感器数值 灰度2传感器数值
传感器在白色区域
传感器在黑线上
白色区域的数值○黑线的数值(填写>、=、<), 白色区域和黑线大概以数值 区分。(可以竖列一组数据的取中间值)
PPT展示灰度传感器数值的中间值:大约600。
一起分析灰度传感器找到黑线值的范围(小于等于600)
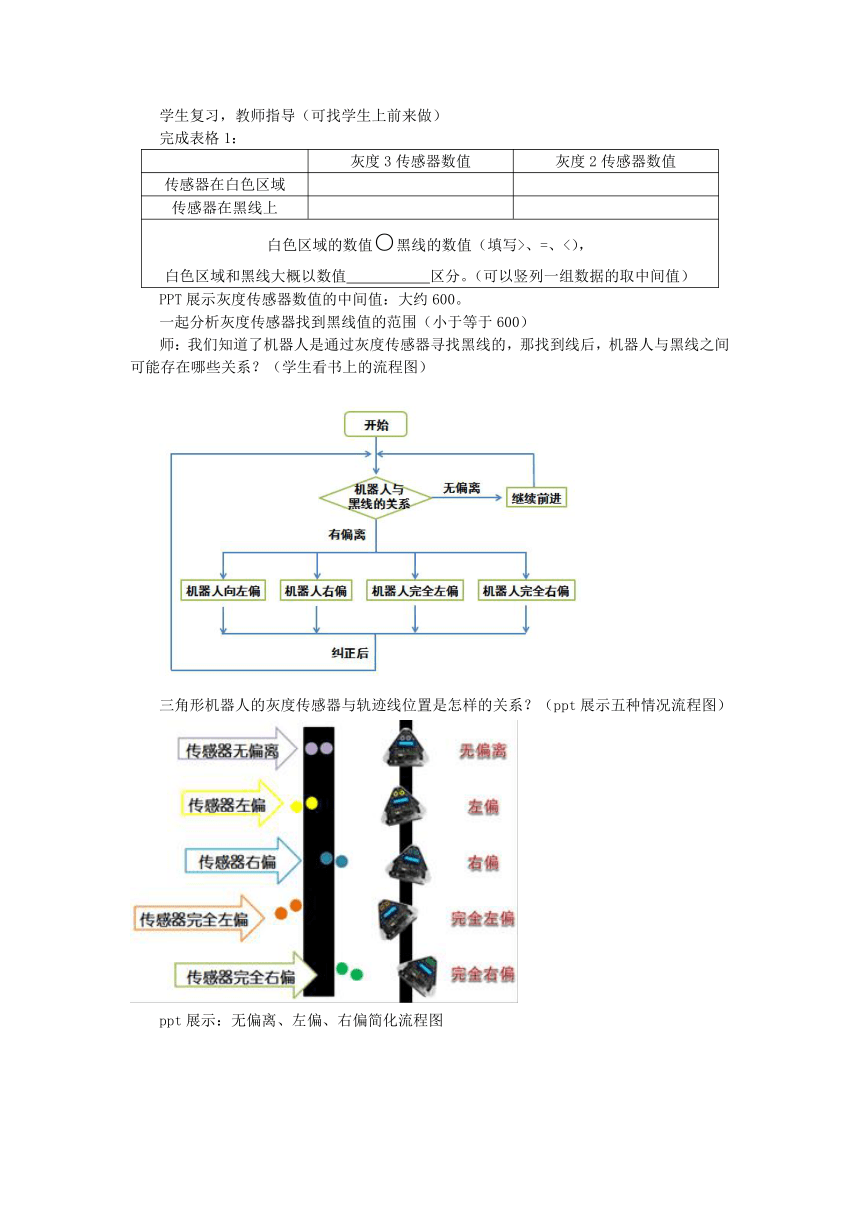
师:我们知道了机器人是通过灰度传感器寻找黑线的,那找到线后,机器人与黑线之间可能存在哪些关系?(学生看书上的流程图)
三角形机器人的灰度传感器与轨迹线位置是怎样的关系?(ppt展示五种情况流程图)
ppt展示:无偏离、左偏、右偏简化流程图
今天研究其中的三中情况:无偏离,左偏,右偏。
师:我们先来研究第一种情况,无偏离(右上图)。
活动二:1、分析机器人“无偏离”运动,填写表格2中“无偏离”对应数据,并完成相应程序。
表格2:
与场地灰度平均值对比 直流电机1 直流电机2
灰度传感器3 灰度传感器2 转向 速度 转向 速度
无偏离 <600 <=600 正转 20 正转 20
对照右偏的条件分析和电机操作,教师先指导学生编写程序,学生将无偏离的程序完成。
活动二: 2、分析机器人“左偏”运动,填写表格2中“左偏”对应数据,并完成相应程序。
课件出示:
学生自主探究,得出数据完成表格2左偏填写。
与场地灰度中间值对比 直流电机1 直流电机2
灰度传感器3 灰度传感器2 转向 速度 转向 速度
无偏离 <600 <=600 正转 20 正转 20
左偏 >600 <=600 正转 20 停止 ——
在教师指导下,请学生上教师机演示程序编写,学生自己完成程序。
活动二:3、分析机器人“右偏”运动,填写表格2中“右偏”对应数据,并完成相应程序。
课件出示:
仍然是让学生先探究完成表格2。
与场地灰度中间值对比 直流电机1 直流电机2
灰度传感器3 灰度传感器2 转向 速度 转向 速度
无偏离 <600 <=600 正转 20 正转 20
左偏 >600 <=600 正转 20 停止 ——
右偏 <=600 >600 停止 —— 正转 20
同学们对照右偏的条件分析和电机操作,完成右偏的程序。
三.程序完善、编译运行
师:今天我们先来研究机器人走弧度较小、较稳定的情况。
出示圆形线路。
师:对于简单的、弧度较小的线路,我们用今天学习的三种情况就能解决问题。
学生动手编译下载程序,按完成的先后顺序到线路上测试程序,学生排队。教师挑选有问题的学生纠正程序错误。
学生整队测试机器人,没有成功的回到座位上修改程序。
四.拓展
师总结:除了以上我们见到的轨迹图,这些也是我们常用的轨迹图。
在一些超级轨迹赛中,还会将这些图进行综合应用。
当然如果紧靠我们今天做的程序是很难达到预期效果的,因为我们的程序还不够完整,在解决一些会出现完全偏离的线路的时候,我们还要添加两段程序。就是我们下节课要介绍两种情况,完全左偏和完全右偏。
同学们,机器人沿线行走在生活中的应用已经非常广泛了。可能同学们去茂业吃饭的时候会看到拿着菜单的机器人,地面上正有一根线,不知道你们注意到了没有,那就是机器人的固定行走路线。随着国内快递业的快速发展,很多快递公司也将沿线行走机器人运用了起来。比如我们接下来看到这个视频,这个是临沂申通仓库的货物分拣运输机器人,有了他们的帮忙,减少了很多快递小哥的忙碌身影。这个是亚马逊机器人物流配送中心的视频,感受机器人沿线行走的优点。
【教学目标】
知识与技能:
让学生了解机器人可以沿线行走;了解灰度传感器的工作原理;了解机器人行走的五种情况(无偏离、左偏、右偏、完全左偏、完全右偏);学会编写机器人沿轨迹线行走程序。
过程与方法:
让学生通过感受、测试、分析等方法,掌握灰度传感器的使用和分支结构程序的条件判断。
情感态度与价值观:
让学生感受到机器人的智能,感受到机器人沿线行走在生活中的重要应用。
【重点难点】
重点:学会在系统设置中添加和设置灰度传感器;学会检测学生机器人向左偏、向右偏、完全左偏、完全右偏;学会编写机器人沿轨迹线行走程序。
难点:灰度传感器数值的理解,五种行走情况的条件判断。
【教学过程】
一.导入
1、从机器人行走入手,回忆机器人行走与电机转动的关系。
师:前面的学习中我们已经学过机器人的行走,你们知道机器人的行走有哪些方式?
如果想让机器人直行、左转、右转,对直流电机有什么要求?
2、观看机器人沿直线行走的视频,了解和体会机器人如何沿以下几种类型的线走。
师:看来同学们前面的知识学得都很扎实,老师这里给大家分享两个机器人的行走视频。同学们要仔细观察,然后告诉老师这两个机器人的行走方式跟之前学习的有什么不一样的地方?
师:这几个机器人是如何行走的?
今天我们就一起来学习机器人沿线行走。(出示课题)
师:刚才的视频中我们看到机器人沿着线走,你知道它是如何找到线的?
两个灰度传感器就是机器人找到黑线的重要部件。(ppt展示灰度传感器?它有什么作用?)
二.深入研究
活动1:编写程序,测出轨迹图上白色区域和黑线的灰度值,并在表格1内填上相应的数据。
师:我们在上节课已经初步了解了灰度传感器,用灰度感应器获取白色区域和黑线的灰度值,确定灰度值的分界点(取两个灰度值的中间值)。
(注意系统设置中的传感器设置)
学生复习,教师指导(可找学生上前来做)
完成表格1:
灰度3传感器数值 灰度2传感器数值
传感器在白色区域
传感器在黑线上
白色区域的数值○黑线的数值(填写>、=、<), 白色区域和黑线大概以数值 区分。(可以竖列一组数据的取中间值)
PPT展示灰度传感器数值的中间值:大约600。
一起分析灰度传感器找到黑线值的范围(小于等于600)
师:我们知道了机器人是通过灰度传感器寻找黑线的,那找到线后,机器人与黑线之间可能存在哪些关系?(学生看书上的流程图)
三角形机器人的灰度传感器与轨迹线位置是怎样的关系?(ppt展示五种情况流程图)
ppt展示:无偏离、左偏、右偏简化流程图
今天研究其中的三中情况:无偏离,左偏,右偏。
师:我们先来研究第一种情况,无偏离(右上图)。
活动二:1、分析机器人“无偏离”运动,填写表格2中“无偏离”对应数据,并完成相应程序。
表格2:
与场地灰度平均值对比 直流电机1 直流电机2
灰度传感器3 灰度传感器2 转向 速度 转向 速度
无偏离 <600 <=600 正转 20 正转 20
对照右偏的条件分析和电机操作,教师先指导学生编写程序,学生将无偏离的程序完成。
活动二: 2、分析机器人“左偏”运动,填写表格2中“左偏”对应数据,并完成相应程序。
课件出示:
学生自主探究,得出数据完成表格2左偏填写。
与场地灰度中间值对比 直流电机1 直流电机2
灰度传感器3 灰度传感器2 转向 速度 转向 速度
无偏离 <600 <=600 正转 20 正转 20
左偏 >600 <=600 正转 20 停止 ——
在教师指导下,请学生上教师机演示程序编写,学生自己完成程序。
活动二:3、分析机器人“右偏”运动,填写表格2中“右偏”对应数据,并完成相应程序。
课件出示:
仍然是让学生先探究完成表格2。
与场地灰度中间值对比 直流电机1 直流电机2
灰度传感器3 灰度传感器2 转向 速度 转向 速度
无偏离 <600 <=600 正转 20 正转 20
左偏 >600 <=600 正转 20 停止 ——
右偏 <=600 >600 停止 —— 正转 20
同学们对照右偏的条件分析和电机操作,完成右偏的程序。
三.程序完善、编译运行
师:今天我们先来研究机器人走弧度较小、较稳定的情况。
出示圆形线路。
师:对于简单的、弧度较小的线路,我们用今天学习的三种情况就能解决问题。
学生动手编译下载程序,按完成的先后顺序到线路上测试程序,学生排队。教师挑选有问题的学生纠正程序错误。
学生整队测试机器人,没有成功的回到座位上修改程序。
四.拓展
师总结:除了以上我们见到的轨迹图,这些也是我们常用的轨迹图。
在一些超级轨迹赛中,还会将这些图进行综合应用。
当然如果紧靠我们今天做的程序是很难达到预期效果的,因为我们的程序还不够完整,在解决一些会出现完全偏离的线路的时候,我们还要添加两段程序。就是我们下节课要介绍两种情况,完全左偏和完全右偏。
同学们,机器人沿线行走在生活中的应用已经非常广泛了。可能同学们去茂业吃饭的时候会看到拿着菜单的机器人,地面上正有一根线,不知道你们注意到了没有,那就是机器人的固定行走路线。随着国内快递业的快速发展,很多快递公司也将沿线行走机器人运用了起来。比如我们接下来看到这个视频,这个是临沂申通仓库的货物分拣运输机器人,有了他们的帮忙,减少了很多快递小哥的忙碌身影。这个是亚马逊机器人物流配送中心的视频,感受机器人沿线行走的优点。