第二章 第三节 创建机器人仿真场地 课件(共17张PPT) 2023—2024学年河大音像版(2020)初中信息技术八年级上册
文档属性
| 名称 | 第二章 第三节 创建机器人仿真场地 课件(共17张PPT) 2023—2024学年河大音像版(2020)初中信息技术八年级上册 |
|
|
| 格式 | pptx | ||
| 文件大小 | 2.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2023-12-21 00:00:00 | ||
图片预览

文档简介
(共17张PPT)
第三节
创建机器人仿真场地
Create a robot simulation site
第二章 解决问题的方法与机器人仿真系统
1、掌握场地文件的创建、保存、修改、导出的方法。
2、掌握根据实际问题,利用实体、光源、创建场地文件的方法。
3、了解VJC1.5仿真版软件的仿真环境界面中各按钮的功能。
学习目标
在生活中,无论是送快递机器人还是导游机器人,他们都是在某些生活实景中运动并完成任务的,在不同的场地中机器人可以完成各种不同的任务。
可以创建仿真场地,将现实生活中的场景利用工具创建出来,在仿真环境中的某个场地,通过运行设计程序来让机器人完成任务。
VJC仿真
VJC仿真软件
导学诱思
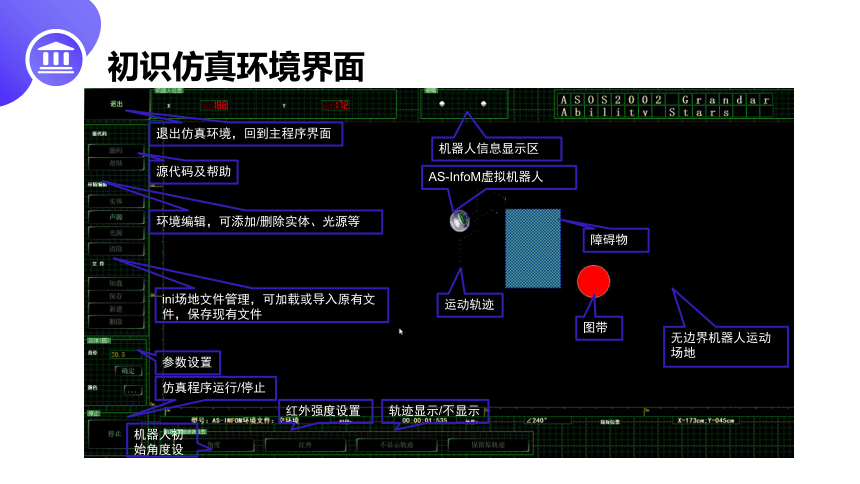
初识仿真环境界面
退出仿真环境,回到主程序界面
源代码及帮助
环境编辑,可添加/删除实体、光源等
ini场地文件管理,可加载或导入原有文件,保存现有文件
参数设置
仿真程序运行/停止
机器人初始角度设置
红外强度设置
轨迹显示/不显示
机器人信息显示区
无边界机器人运动场地
运动轨迹
AS-InfoM虚拟机器人
障碍物
图带
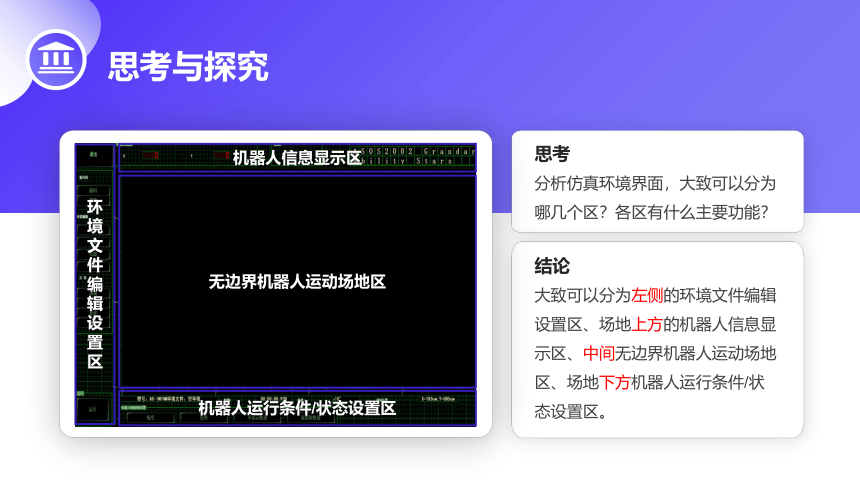
分析仿真环境界面,大致可以分为哪几个区?各区有什么主要功能?
思考
大致可以分为左侧的环境文件编辑设置区、场地上方的机器人信息显示区、中间无边界机器人运动场地区、场地下方机器人运行条件/状态设置区。
结论
思考与探究
机器人信息显示区
环境文件编辑设置区
机器人运行条件/状态设置区
无边界机器人运动场地区
创建一个仿真场地,大致需要哪些工具?
探究
使用障碍物构建不可逾越的围墙、障碍,使用图带构建街道、路面,使用光源构建发光物体,使用声源构建发声物体。若不再需要实体,需要使用删除命令。
结论
思考与探究
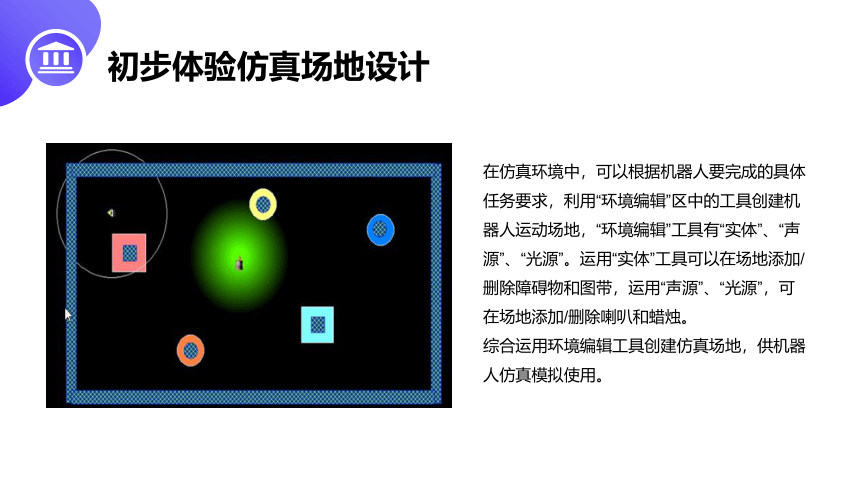
在仿真环境中,可以根据机器人要完成的具体任务要求,利用“环境编辑”区中的工具创建机器人运动场地,“环境编辑”工具有“实体”、“声源”、“光源”。运用“实体”工具可以在场地添加/删除障碍物和图带,运用“声源”、“光源”,可在场地添加/删除喇叭和蜡烛。
综合运用环境编辑工具创建仿真场地,供机器人仿真模拟使用。
初步体验仿真场地设计
01
如何删除实体?可以一次删除多个实体吗?
在VJC1.5仿真版软件的仿真环境中,在添加的实体上单击右键,是没有快捷菜单的,对于实体的所有操作,需要通过左侧的环境文件编辑设置区实施。要删除实体,需要先单击“实体”—“删除”,鼠标光标会变成手型,单击任意实体,可删除此实体。
但使用删除实体的方式一次只能删除一个实体。
(一)实体的添加、设置与删除
初步体验仿真场地设计
02
障碍物与图带的区别是什么?怎样可以清除整个场地?
添加了障碍物的区域,机器人是不能通过的,需要绕开行走。
若想清除整个场地,需要单击“环境编辑”中的“清除”命令。
(一)实体的添加、设置与删除
初步体验仿真场地设计
03
障碍物适合用来标示哪些场地?图带适合标示什么呢?
障碍物用来标示机器人不能通过的建筑物、墙体等。
图带一般用来标示地面、绿化带、街道等,或者用来给加载了地面检测传感器的机器人来辨识地面。
(一)实体的添加、设置与删除
初步体验仿真场地设计
添加光源后,观察其半径的默认值,尝试修改其半径和渐变值,探索这两种值的范围分别是什么。添加声源后,探索显示声音范围的方法,并尝试修改声音范围。探索删除光源和声源的方法。
思考
光源实体的半径的默认值是100,渐变值的默认值是20。半径的范围是80-180,渐变值的范围是10-30,修改光源范围的方法是添加光源后,在参数区修改参数值。声源实体的半径范围是80-180,修改声音范围的方法是单击“声源”—“编辑”,然后在参数区修改参数值。删除光源和声源的方法是在环境编辑区,单击“光源”或“声源”—“删除”。
结论
思考与探究
(二)光源、声源的添加、设置与删除
修改光源位置
如果刚才编辑完“练习场地''后,直接单击左上角的“退出”,回到程序设计主界面, 那么“练习场地”将无法找到,需要再次创建。
1、打开场地文件,尝试修改光源位置?
(三)场地文件的加载、导入及修改
初步体验仿真场地设计
保存和导出
将修改后的“标准灭火场地.ini”文件保存为“标准灭火场地-2.ini”,并将其导出到“我的仿真场地”。
VJC1.5仿真版软件不能自动保存场地文件, 需要在仿真界面先保存,再导出。
场地文件默认保存在C:\Program Files \VJC1.5仿真版\Entironment文件夹中。
1、打开场地文件,尝试保存和导出场地?
初步体验仿真场地设计
(四)场地文件的保存和导出
实践活动1
如图,查看“小区平面图”,图中 所示处为快递公司, 为收件人所在处,蓝色为建筑物,灰色为街道。如何用实体构建机器人仿真场地,使机器人可以在仿真 环境中测试程序?进入VJC1.5仿真环境中,利用“环境编辑”工具创建“送快递场地”, 并保存场地文件。
实践活动2
利用仿真环境中的“实体”工具,创建一个“操场场地”,并保存场地文件。(场地相似即可)
【小贴士】“实体”中没有圆弧工具,可以使用圆形图带和矩形图带组合出操场的形状。
导游机器人小路需要引导游客 到三个游览点参观,观察右图, 如何用仿真环境中的“实体"工具创建“三角场馆场地"?(蓝色区域表示建筑物,绿色区域表示绿化带,红色五角星处为浏览点)
(1)“实体"中有可以直接表现三角形状的障碍物或图带吗?
(2)如何用“实体”中的障碍物和图带构建一个有斜边或不规则形状的场地
练习提升
谢谢您的观赏
创建机器人仿真场地
第二章 解决问题的方法与机器人仿真系统
Methods for solving problems
第三节
创建机器人仿真场地
Create a robot simulation site
第二章 解决问题的方法与机器人仿真系统
1、掌握场地文件的创建、保存、修改、导出的方法。
2、掌握根据实际问题,利用实体、光源、创建场地文件的方法。
3、了解VJC1.5仿真版软件的仿真环境界面中各按钮的功能。
学习目标
在生活中,无论是送快递机器人还是导游机器人,他们都是在某些生活实景中运动并完成任务的,在不同的场地中机器人可以完成各种不同的任务。
可以创建仿真场地,将现实生活中的场景利用工具创建出来,在仿真环境中的某个场地,通过运行设计程序来让机器人完成任务。
VJC仿真
VJC仿真软件
导学诱思
初识仿真环境界面
退出仿真环境,回到主程序界面
源代码及帮助
环境编辑,可添加/删除实体、光源等
ini场地文件管理,可加载或导入原有文件,保存现有文件
参数设置
仿真程序运行/停止
机器人初始角度设置
红外强度设置
轨迹显示/不显示
机器人信息显示区
无边界机器人运动场地
运动轨迹
AS-InfoM虚拟机器人
障碍物
图带
分析仿真环境界面,大致可以分为哪几个区?各区有什么主要功能?
思考
大致可以分为左侧的环境文件编辑设置区、场地上方的机器人信息显示区、中间无边界机器人运动场地区、场地下方机器人运行条件/状态设置区。
结论
思考与探究
机器人信息显示区
环境文件编辑设置区
机器人运行条件/状态设置区
无边界机器人运动场地区
创建一个仿真场地,大致需要哪些工具?
探究
使用障碍物构建不可逾越的围墙、障碍,使用图带构建街道、路面,使用光源构建发光物体,使用声源构建发声物体。若不再需要实体,需要使用删除命令。
结论
思考与探究
在仿真环境中,可以根据机器人要完成的具体任务要求,利用“环境编辑”区中的工具创建机器人运动场地,“环境编辑”工具有“实体”、“声源”、“光源”。运用“实体”工具可以在场地添加/删除障碍物和图带,运用“声源”、“光源”,可在场地添加/删除喇叭和蜡烛。
综合运用环境编辑工具创建仿真场地,供机器人仿真模拟使用。
初步体验仿真场地设计
01
如何删除实体?可以一次删除多个实体吗?
在VJC1.5仿真版软件的仿真环境中,在添加的实体上单击右键,是没有快捷菜单的,对于实体的所有操作,需要通过左侧的环境文件编辑设置区实施。要删除实体,需要先单击“实体”—“删除”,鼠标光标会变成手型,单击任意实体,可删除此实体。
但使用删除实体的方式一次只能删除一个实体。
(一)实体的添加、设置与删除
初步体验仿真场地设计
02
障碍物与图带的区别是什么?怎样可以清除整个场地?
添加了障碍物的区域,机器人是不能通过的,需要绕开行走。
若想清除整个场地,需要单击“环境编辑”中的“清除”命令。
(一)实体的添加、设置与删除
初步体验仿真场地设计
03
障碍物适合用来标示哪些场地?图带适合标示什么呢?
障碍物用来标示机器人不能通过的建筑物、墙体等。
图带一般用来标示地面、绿化带、街道等,或者用来给加载了地面检测传感器的机器人来辨识地面。
(一)实体的添加、设置与删除
初步体验仿真场地设计
添加光源后,观察其半径的默认值,尝试修改其半径和渐变值,探索这两种值的范围分别是什么。添加声源后,探索显示声音范围的方法,并尝试修改声音范围。探索删除光源和声源的方法。
思考
光源实体的半径的默认值是100,渐变值的默认值是20。半径的范围是80-180,渐变值的范围是10-30,修改光源范围的方法是添加光源后,在参数区修改参数值。声源实体的半径范围是80-180,修改声音范围的方法是单击“声源”—“编辑”,然后在参数区修改参数值。删除光源和声源的方法是在环境编辑区,单击“光源”或“声源”—“删除”。
结论
思考与探究
(二)光源、声源的添加、设置与删除
修改光源位置
如果刚才编辑完“练习场地''后,直接单击左上角的“退出”,回到程序设计主界面, 那么“练习场地”将无法找到,需要再次创建。
1、打开场地文件,尝试修改光源位置?
(三)场地文件的加载、导入及修改
初步体验仿真场地设计
保存和导出
将修改后的“标准灭火场地.ini”文件保存为“标准灭火场地-2.ini”,并将其导出到“我的仿真场地”。
VJC1.5仿真版软件不能自动保存场地文件, 需要在仿真界面先保存,再导出。
场地文件默认保存在C:\Program Files \VJC1.5仿真版\Entironment文件夹中。
1、打开场地文件,尝试保存和导出场地?
初步体验仿真场地设计
(四)场地文件的保存和导出
实践活动1
如图,查看“小区平面图”,图中 所示处为快递公司, 为收件人所在处,蓝色为建筑物,灰色为街道。如何用实体构建机器人仿真场地,使机器人可以在仿真 环境中测试程序?进入VJC1.5仿真环境中,利用“环境编辑”工具创建“送快递场地”, 并保存场地文件。
实践活动2
利用仿真环境中的“实体”工具,创建一个“操场场地”,并保存场地文件。(场地相似即可)
【小贴士】“实体”中没有圆弧工具,可以使用圆形图带和矩形图带组合出操场的形状。
导游机器人小路需要引导游客 到三个游览点参观,观察右图, 如何用仿真环境中的“实体"工具创建“三角场馆场地"?(蓝色区域表示建筑物,绿色区域表示绿化带,红色五角星处为浏览点)
(1)“实体"中有可以直接表现三角形状的障碍物或图带吗?
(2)如何用“实体”中的障碍物和图带构建一个有斜边或不规则形状的场地
练习提升
谢谢您的观赏
创建机器人仿真场地
第二章 解决问题的方法与机器人仿真系统
Methods for solving problems
同课章节目录