2023-2024学年度鲁科版物理选必修2全册过关综合性考试B卷(后附解析)
文档属性
| 名称 | 2023-2024学年度鲁科版物理选必修2全册过关综合性考试B卷(后附解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 831.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 鲁科版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-02-03 00:00:00 | ||
图片预览
文档简介
保密★启用前
2023-2024学年度 鲁科版物理选必修2 全册过关综合性 考试B卷
试卷后附解析
考试范围:xxx;考试时间:75分钟;命题人:xxx
题号 一 二 三 四 总分
得分
注意事项:
1.答题前填写好自己的姓名、班级、考号等信息
2.请将答案正确填写在答题卡上
第I卷(选择题)
请添加修改第I卷的文字说明
评卷人得分
一、单选题
1.关于自由落体运动,下列说法中正确的是( )
A.在空气中不考虑阻力的运动是自由落体运动
B.只受重力的运动是自由落体运动
C.质量大的物体,所受重力大,因而落地速度大
D.自由落体加速度在地球赤道处最小
2.一颗人造卫星靠近某行星表面做匀速圆周运动,在某段时间内,卫星运行的路程为S,运动转过的角度为,引力常量为G,该行星的质量为M,则人造卫星绕行星运转的角速度为( )
A. B. C. D.
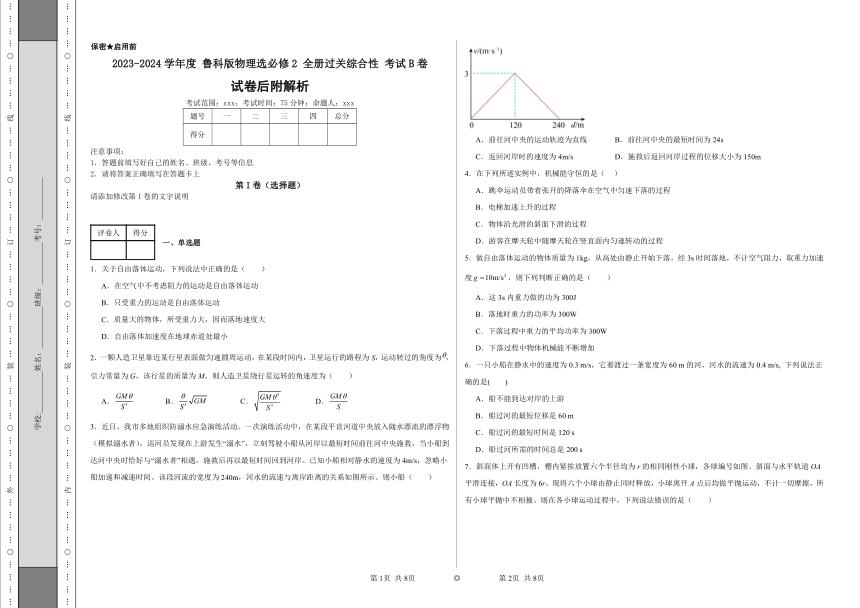
3.近日,我市多地组织防溺水应急演练活动。一次演练活动中,在某段平直河道中央放入随水漂流的漂浮物(模拟溺水者),巡河员发现在上游发生“溺水”,立刻驾驶小船从河岸以最短时间前往河中央施救,当小船到达河中央时恰好与“溺水者”相遇,施救后再以最短时间回到河岸。已知小船相对静水的速度为4m/s,忽略小船加速和减速时间。该段河流的宽度为240m,河水的流速与离岸距离的关系如图所示。则小船( )
A.前往河中央的运动轨迹为直线 B.前往河中央的最短时间为24s
C.返回河岸时的速度为4m/s D.施救后返回河岸过程的位移大小为150m
4.在下列所述实例中,机械能守恒的是( )
A.跳伞运动员带着张开的降落伞在空气中匀速下落的过程
B.电梯加速上升的过程
C.物体沿光滑的斜面下滑的过程
D.游客在摩天轮中随摩天轮在竖直面内匀速转动的过程
5.做自由落体运动的物体质量为1kg,从高处由静止开始下落,经3s时间落地,不计空气阻力,取重力加速度,则下列判断正确的是( )
A.这3s内重力做的功为300J
B.落地时重力的功率为300W
C.下落过程中重力的平均功率为300W
D.下落过程中物体机械能不断增加
6.一只小船在静水中的速度为0.3 m/s,它要渡过一条宽度为60 m的河,河水的流速为0.4 m/s, 下列说法正确的是( )
A.船不能到达对岸的上游
B.船过河的最短位移是60 m
C.船过河的最短时间是120 s
D.船过河所需的时间总是200 s
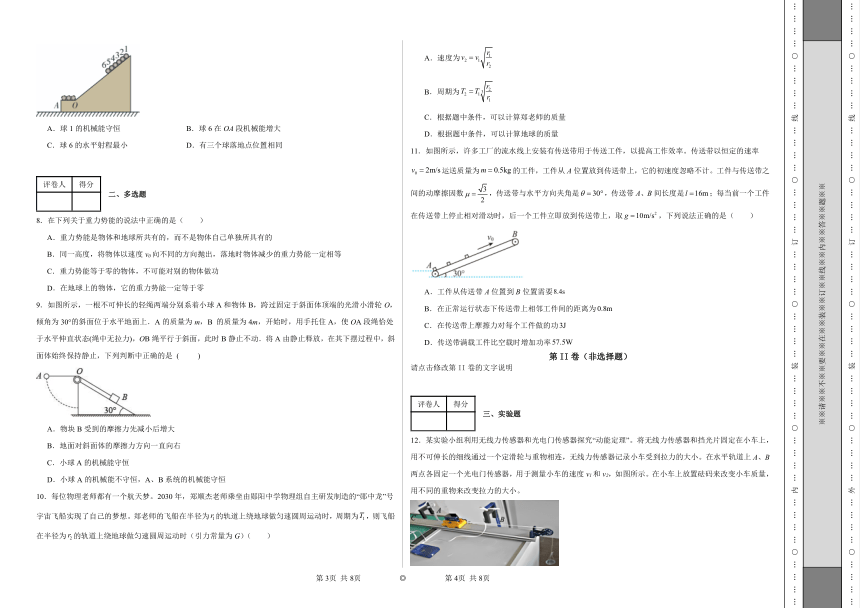
7.斜面体上开有凹槽,槽内紧挨放置六个半径均为r的相同刚性小球,各球编号如图。斜面与水平轨道OA平滑连接,OA长度为6r。现将六个小球由静止同时释放,小球离开A点后均做平抛运动,不计一切摩擦,所有小球平抛中不相撞。则在各小球运动过程中,下列说法错误的是( )
A.球1的机械能守恒 B.球6在OA段机械能增大
C.球6的水平射程最小 D.有三个球落地点位置相同
评卷人得分
二、多选题
8.在下列关于重力势能的说法中正确的是( )
A.重力势能是物体和地球所共有的,而不是物体自己单独所具有的
B.同一高度,将物体以速度v0向不同的方向抛出,落地时物体减少的重力势能一定相等
C.重力势能等于零的物体,不可能对别的物体做功
D.在地球上的物体,它的重力势能一定等于零
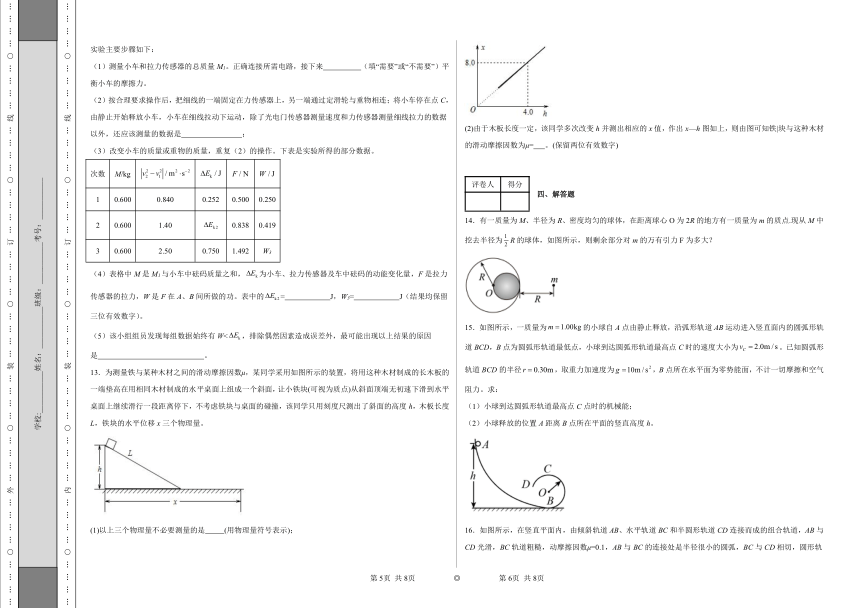
9.如图所示,一根不可伸长的轻绳两端分别系着小球A和物体B,跨过固定于斜面体顶端的光滑小滑轮O,倾角为30°的斜面位于水平地面上.A的质量为m,B 的质量为4m,开始时,用手托住A,使OA段绳恰处于水平伸直状态(绳中无拉力),OB绳平行于斜面,此时B静止不动.将A由静止释放,在其下摆过程中,斜面体始终保持静止,下列判断中正确的是 ( )
A.物块B受到的摩擦力先减小后增大
B.地面对斜面体的摩擦力方向一直向右
C.小球A的机械能守恒
D.小球A的机械能不守恒,A、B系统的机械能守恒
10.每位物理老师都有一个航天梦。2030年,郑顺杰老师乘坐由郧阳中学物理组自主研发制造的“郧中龙”号宇宙飞船实现了自己的梦想。郑老师的飞船在半径为的轨道上绕地球做匀速圆周运动时,周期为,则飞船在半径为的轨道上绕地球做匀速圆周运动时(引力常量为G)( )
A.速度为
B.周期为
C.根据题中条件,可以计算郑老师的质量
D.根据题中条件,可以计算地球的质量
11.如图所示,许多工厂的流水线上安装有传送带用于传送工件,以提高工作效率。传送带以恒定的速率运送质量为的工件,工件从A位置放到传送带上,它的初速度忽略不计。工件与传送带之间的动摩擦因数,传送带与水平方向夹角是,传送带A、B间长度是;每当前一个工件在传送带上停止相对滑动时,后一个工件立即放到传送带上,取,下列说法正确的是( )
A.工件从传送带A位置到B位置需要
B.在正常运行状态下传送带上相邻工件间的距离为
C.在传送带上摩擦力对每个工件做的功
D.传送带满载工件比空载时增加功率
第II卷(非选择题)
请点击修改第II卷的文字说明
评卷人得分
三、实验题
12.某实验小组利用无线力传感器和光电门传感器探究“动能定理”。将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物相连,无线力传感器记录小车受到拉力的大小。在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示。在小车上放置砝码来改变小车质量,用不同的重物来改变拉力的大小。
实验主要步骤如下:
(1)测量小车和拉力传感器的总质量M1。正确连接所需电路,接下来 (填“需要”或“不需要”)平衡小车的摩擦力。
(2)按合理要求操作后,把细线的一端固定在力传感器上,另一端通过定滑轮与重物相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量细线拉力的数据以外,还应该测量的数据是 ;
(3)改变小车的质量或重物的质量,重复(2)的操作。下表是实验所得的部分数据。
次数 M/kg
1 0.600 0.840 0.252 0.500 0.250
2 0.600 1.40 0.838 0.419
3 0.600 2.50 0.750 1.492 W3
(4)表格中M是M1与小车中砝码质量之和,为小车、拉力传感器及车中砝码的动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功。表中的= J,W3= J(结果均保留三位有效数字)。
(5)该小组组员发现每组数据始终有W<,排除偶然因素造成误差外,最可能出现以上结果的原因是 。
13.为测量铁与某种木材之间的滑动摩擦因数μ,某同学采用如图所示的装置,将用这种木材制成的长木板的一端垫高在用相同木材制成的水平桌面上组成一个斜面,让小铁块(可视为质点)从斜面顶端无初速下滑到水平桌面上继续滑行一段距离停下,不考虑铁块与桌面的碰撞,该同学只用刻度尺测出了斜面的高度h,木板长度L,铁块的水平位移x三个物理量。
(1)以上三个物理量不必要测量的是 (用物理量符号表示);
(2)由于木板长度一定,该同学多次改变h并测出相应的x值,作出x—h图如上,则由图可知铁|块与这种木材的滑动摩擦因数为μ= 。(保留两位有效数字)
评卷人得分
四、解答题
14.有一质量为M、半径为R、密度均匀的球体,在距离球心O为2R的地方有一质量为m的质点.现从M中挖去半径为R的球体,如图所示,则剩余部分对m的万有引力F为多大?
15.如图所示,一质量为的小球自A点由静止释放,沿弧形轨道AB运动进入竖直面内的圆弧形轨道BCD,B点为圆弧形轨道最低点,小球到达圆弧形轨道最高点C时的速度大小为。已知圆弧形轨道BCD的半径,取重力加速度为,B点所在水平面为零势能面,不计一切摩擦和空气阻力。求:
(1)小球到达圆弧形轨道最高点C点时的机械能;
(2)小球释放的位置A距离B点所在平面的竖直高度h。
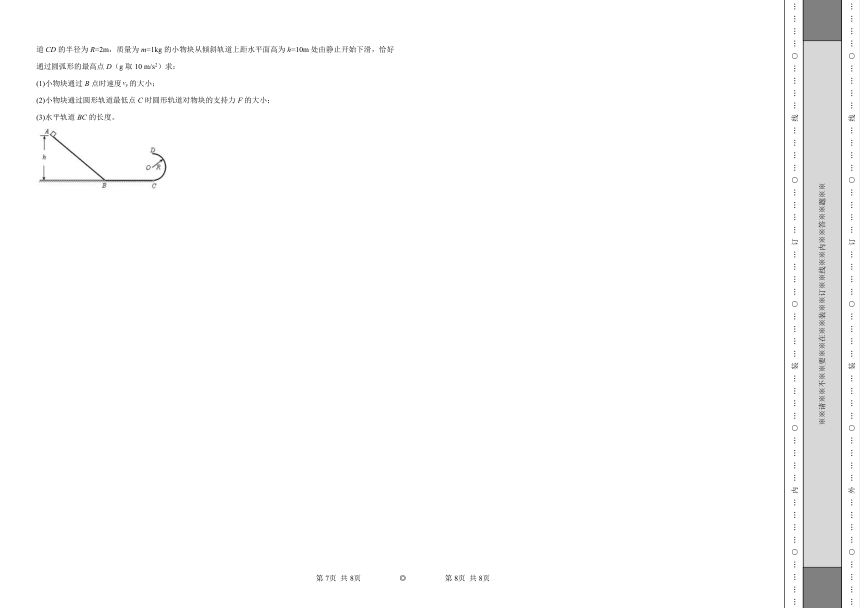
16.如图所示,在竖直平面内,由倾斜轨道AB、水平轨道BC和半圆形轨道CD连接而成的组合轨道,AB与CD光滑,BC轨道粗糙,动摩擦因数μ=0.1,AB与BC的连接处是半径很小的圆弧,BC与CD相切,圆形轨道CD的半径为R=2m,质量为m=1kg的小物块从倾斜轨道上距水平面高为h=10m处由静止开始下滑,恰好通过圆弧形的最高点D(g取10 m/s2)求:
(1)小物块通过B点时速度的大小;
(2)小物块通过圆形轨道最低点C时圆形轨道对物块的支持力F的大小;
(3)水平轨道BC的长度。
(
…………○…………内…………○…………装…………○…………订…………○…………线…………○…………
) (
※※请※※不※※要※※在※※装※※订※※线※※内※※答※※题※※
) (
…………○…………外…………○…………装…………○…………订…………○…………线…………○…………
)
(
…………○…………内…………○…………装…………○…………订…………○…………线…………○…………
) (
学校:___________姓名:___________班级:___________考号:___________
) (
…………○…………外…………○…………装…………○…………订…………○…………线…………○…………
)
第1页 共4页 ◎ 第2页 共4页
第1页 共4页 ◎ 第2页 共4页
参考答案:
1.D
解析:A.自由落体运动是指物体仅在重力的作用下由静止开始下落的运动,故A错误;
B.自由落体是指初速度为零且只受重力的运动,故B错误;
C.所有物体只在重力作用下运动时,加速度均为g,落地速度与物体的质量无关,故C错误;
D.地球表面的物体在不同纬度处的自由落体加速度不同,在地球赤道处最小,两极处最大。故D正确。
答案:D。
2.C
解析:根据题意,由公式,和可得,人造卫星绕行星运转的轨道半径为
由万有引力提供向心了有
联立可得
答案:C。
3.C
解析:A.由题意可知,小船的速度不变,水流速度随离岸的距离增大而增大,小船在水中运动时,同时参与了一个是匀速直线运动,一个是变速直线运动,由运动的合成规律,可知小船前往河中央的运动轨迹为曲线,A错误;
B.小船前往河中央的最短时间为
B错误;
C.小船返回河岸时,水流速度是零,因此只有小船在静水中的速度,则小船速度为4m/s,C正确;
D.施救后返回河岸的运动中,小船在垂直河岸方向的分运动是匀速直线运动,位移是120m,时间是30s,水流速度随小船向河岸位移成比例的减小,也就是随小船返回时间成比例减小,因此可知,当小船返回到河岸时,小船沿水流方向的位移为
可得施救后小船返回河岸过程的位移大小为
D错误。
答案:C。
4.C
解析:A.跳伞运动员带着张开的降落伞在空气中匀速下落的过程,所受重力与阻力平衡,除重力做功外,阻力对其做负功,因此该过程跳伞运动员的机械能减小,故A错误;
B.电梯加速上升的过程,除重力做功外,钢索对电梯的拉力做正功,因此电梯的机械能增加,故B错误;
C.物体沿光滑的斜面下滑的过程中仅有重力做功,物体的机械能守恒,故C正确;
D.游客在摩天轮中随摩天轮在竖直面内匀速转动的过程,从最低点到最高点,除重力做功外,摩天轮对人的作用力做正功,人的机械能增加;从最高点到最低点的过程中,除重力做功,摩天轮对人的作用力做负功,人的机械能减小,故D错误。
答案:C。
5.B
解析:A.物体下降的高度
这3s内重力做的功为
故A错误;
B.落地时物体速度
落地时重力的功率
故B正确;
C.下落过程中重力的平均功率
故C错误;
D.物体做自由落体运动,只有重力做功,机械能守恒,故D错误。
答案:B。
6.A
解析:AB.因为船速小于水速,所以船不可能到达对岸上游或正对岸,因此最短距离一定大于60m,故A正确,B错误;
CD.过河最短时间是船速垂直河岸的时候所用时间,为
因此最短时间为200s,除此之外,船沿任意方向运动到达对岸所用时间都大于200s,故CD错误。
答案:A。
7.A
解析:A.6个小球都在斜面上运动时,只有重力做功,整个系统机械能守恒,当有部分小球在水平轨道上运动时,斜面上的小球仍在加速,球2对1的作用力做功,故球1的机械能不守恒,故A错误;
B.球6在OA段运动时,斜面上的小球在加速,球5对球6的作用力做正功,动能增加,机械能增大,故B正确;
C.由于有部分小球在水平轨道上运动时,斜面上的小球仍在加速,所以可知离开A点时球6的速度最小,水平射程最小,C正确;
D.最后三个小球在水平面上运动不再加速,3、2、1速度相等,水平射程相同,落地位置相同,D正确。本题选择不正确的。
答案:A。
8.AB
解析:A.根据重力势能的定义可以知道,重力势能是地球和物体共同具有的,故A正确;
B.同一高度,将物体以速度v0向不同的方向抛出,落地时物体下落的高度是相等的,所以物体减少的重力势能一定相等,故B正确;
C.物体的重力势能与所选的零势能面有关,重力势能等于零的物体,高度也可以很高,也可以对别的物体做功;故C错误;
D.物体的重力势能与所选的零势能面有关,当不是取地面为零势能面时,它的重力势能就不等于零,故D错误。
答案:AB。
9.ABC
解析:A.小球A摆下过程,根据动能定理
最低点由牛顿第二定律得
解得
F=3mg
再对B受力分析,受重力.支持力.拉力和静摩擦力,重力的下滑分量为
Fx=4mgsin30°=2mg
所以静摩擦力先减小,当拉力大于2mg后反向变大,故A正确;
B.对整体受力分析,由于A球向左下方拉物体B和斜面体整体,故一定受到地面对其向右的静摩擦力,故B正确;
CD.小球A摆下过程,若B不动,只有重力做功,机械能守恒,故C正确,D错误。
答案:ABC正确。
10.AD
解析:A.根据牛第二定律可知
可得飞船绕地球做匀速圆周运动的速率为
由题意,可得
,
即
故A正确;
BCD.设郑老师的质量为,地球质量为,根据牛第二定律可知
可得地球的质量为
所以由题意,可得
或
可得
显然郑老师的质量由题目已知条件无法求出,故BC错误,D正确。
答案:AD。
11.AD
解析:A.根据牛顿第二定律得
解得工件在传送带上的加速度
根据v=at得,工件放到传送带后相对静止所经历的时间
停止滑动前,工件相对地移动的距离为
工件在传送带上匀速运动的长度
工件在传送带上匀速运动的时间
工件从传送带A位置到B位置需要
故A正确;
B.在正常运行状态下传送带上相邻工件间的距离为
故B错误;
C.在传送带上先是滑动摩擦力做功,然后是静摩擦力做功,则
故C错误;
D.由
知满载时皮带上共有工件11个,其中10个在做匀速直线运动,则
所以传送带满载工件比空载时增加功率
故D正确。
答案:AD。
12. 需要 两光电门间的距离L 0.420 0.746 平衡摩擦力过大
解析:(1)[1]本实验人物传感器的拉力为研究对象的合力,所以需要平衡小车的摩擦力。
(2)[2]根据动能定理知,因要求总功,有
所以必须已知小车位移,故除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L。
(4)[3][4]由
解得
根据表中前两组数据,由功公式
可求出两光电门间距离为
所以有
(5)[5]该小组组员发现每组数据始终有W<ΔEk,排除偶然因素造成误差外,最可能出现以上结果的原因是平衡摩擦力过大了,导致传感器的拉力比合力要小。
13. L 0.50
解析:小铁块从斜面顶端无初速下滑到水平桌面上继续滑行一段距离停下,再这一段对小铁块应用动能定理得: ,和L没有关系,所以不需要测L.根据图象得到斜率为,所以.
点拨:根据动能定理再结合图象即可得出.
14.
解析:质量为M的球体对质点m的万有引力F1==
挖去的球体的质量M′= =
质量为M′的球体对质点m的万有引力F2=
则剩余部分对质点m的万有引力,F=F1-F2=-=
15.(1)8J;(2)0.8m
解析:(1)小球到达圆弧形轨道最高点C点时的机械能
(2)从A到C由机械能守恒定律
解得小球释放的位置A距离B点所在平面的竖直高度
h=0.8m
16.(1)m/s;(2)60N;(3)50m。
解析:(1)物块从A点运动到B点的过程中,由机械能守恒得
解得:
(2)物块恰好通过圆弧形的最高点D时由重力提供向心力,
由牛顿第二定律得:
可得:
物块从C到B过程,由机械能守恒得:
联立解得:
在C点,由牛顿你第二定律得:
解得:
(3)从B到C,由动能定理得:
解得:
点拨:本题考查动能定理及竖直面内的圆周运动,选择合适的过程,并注意竖直面内圆周运动的临界条件即可求解。
答案第1页,共2页
答案第1页,共2页
2023-2024学年度 鲁科版物理选必修2 全册过关综合性 考试B卷
试卷后附解析
考试范围:xxx;考试时间:75分钟;命题人:xxx
题号 一 二 三 四 总分
得分
注意事项:
1.答题前填写好自己的姓名、班级、考号等信息
2.请将答案正确填写在答题卡上
第I卷(选择题)
请添加修改第I卷的文字说明
评卷人得分
一、单选题
1.关于自由落体运动,下列说法中正确的是( )
A.在空气中不考虑阻力的运动是自由落体运动
B.只受重力的运动是自由落体运动
C.质量大的物体,所受重力大,因而落地速度大
D.自由落体加速度在地球赤道处最小
2.一颗人造卫星靠近某行星表面做匀速圆周运动,在某段时间内,卫星运行的路程为S,运动转过的角度为,引力常量为G,该行星的质量为M,则人造卫星绕行星运转的角速度为( )
A. B. C. D.
3.近日,我市多地组织防溺水应急演练活动。一次演练活动中,在某段平直河道中央放入随水漂流的漂浮物(模拟溺水者),巡河员发现在上游发生“溺水”,立刻驾驶小船从河岸以最短时间前往河中央施救,当小船到达河中央时恰好与“溺水者”相遇,施救后再以最短时间回到河岸。已知小船相对静水的速度为4m/s,忽略小船加速和减速时间。该段河流的宽度为240m,河水的流速与离岸距离的关系如图所示。则小船( )
A.前往河中央的运动轨迹为直线 B.前往河中央的最短时间为24s
C.返回河岸时的速度为4m/s D.施救后返回河岸过程的位移大小为150m
4.在下列所述实例中,机械能守恒的是( )
A.跳伞运动员带着张开的降落伞在空气中匀速下落的过程
B.电梯加速上升的过程
C.物体沿光滑的斜面下滑的过程
D.游客在摩天轮中随摩天轮在竖直面内匀速转动的过程
5.做自由落体运动的物体质量为1kg,从高处由静止开始下落,经3s时间落地,不计空气阻力,取重力加速度,则下列判断正确的是( )
A.这3s内重力做的功为300J
B.落地时重力的功率为300W
C.下落过程中重力的平均功率为300W
D.下落过程中物体机械能不断增加
6.一只小船在静水中的速度为0.3 m/s,它要渡过一条宽度为60 m的河,河水的流速为0.4 m/s, 下列说法正确的是( )
A.船不能到达对岸的上游
B.船过河的最短位移是60 m
C.船过河的最短时间是120 s
D.船过河所需的时间总是200 s
7.斜面体上开有凹槽,槽内紧挨放置六个半径均为r的相同刚性小球,各球编号如图。斜面与水平轨道OA平滑连接,OA长度为6r。现将六个小球由静止同时释放,小球离开A点后均做平抛运动,不计一切摩擦,所有小球平抛中不相撞。则在各小球运动过程中,下列说法错误的是( )
A.球1的机械能守恒 B.球6在OA段机械能增大
C.球6的水平射程最小 D.有三个球落地点位置相同
评卷人得分
二、多选题
8.在下列关于重力势能的说法中正确的是( )
A.重力势能是物体和地球所共有的,而不是物体自己单独所具有的
B.同一高度,将物体以速度v0向不同的方向抛出,落地时物体减少的重力势能一定相等
C.重力势能等于零的物体,不可能对别的物体做功
D.在地球上的物体,它的重力势能一定等于零
9.如图所示,一根不可伸长的轻绳两端分别系着小球A和物体B,跨过固定于斜面体顶端的光滑小滑轮O,倾角为30°的斜面位于水平地面上.A的质量为m,B 的质量为4m,开始时,用手托住A,使OA段绳恰处于水平伸直状态(绳中无拉力),OB绳平行于斜面,此时B静止不动.将A由静止释放,在其下摆过程中,斜面体始终保持静止,下列判断中正确的是 ( )
A.物块B受到的摩擦力先减小后增大
B.地面对斜面体的摩擦力方向一直向右
C.小球A的机械能守恒
D.小球A的机械能不守恒,A、B系统的机械能守恒
10.每位物理老师都有一个航天梦。2030年,郑顺杰老师乘坐由郧阳中学物理组自主研发制造的“郧中龙”号宇宙飞船实现了自己的梦想。郑老师的飞船在半径为的轨道上绕地球做匀速圆周运动时,周期为,则飞船在半径为的轨道上绕地球做匀速圆周运动时(引力常量为G)( )
A.速度为
B.周期为
C.根据题中条件,可以计算郑老师的质量
D.根据题中条件,可以计算地球的质量
11.如图所示,许多工厂的流水线上安装有传送带用于传送工件,以提高工作效率。传送带以恒定的速率运送质量为的工件,工件从A位置放到传送带上,它的初速度忽略不计。工件与传送带之间的动摩擦因数,传送带与水平方向夹角是,传送带A、B间长度是;每当前一个工件在传送带上停止相对滑动时,后一个工件立即放到传送带上,取,下列说法正确的是( )
A.工件从传送带A位置到B位置需要
B.在正常运行状态下传送带上相邻工件间的距离为
C.在传送带上摩擦力对每个工件做的功
D.传送带满载工件比空载时增加功率
第II卷(非选择题)
请点击修改第II卷的文字说明
评卷人得分
三、实验题
12.某实验小组利用无线力传感器和光电门传感器探究“动能定理”。将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物相连,无线力传感器记录小车受到拉力的大小。在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示。在小车上放置砝码来改变小车质量,用不同的重物来改变拉力的大小。
实验主要步骤如下:
(1)测量小车和拉力传感器的总质量M1。正确连接所需电路,接下来 (填“需要”或“不需要”)平衡小车的摩擦力。
(2)按合理要求操作后,把细线的一端固定在力传感器上,另一端通过定滑轮与重物相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量细线拉力的数据以外,还应该测量的数据是 ;
(3)改变小车的质量或重物的质量,重复(2)的操作。下表是实验所得的部分数据。
次数 M/kg
1 0.600 0.840 0.252 0.500 0.250
2 0.600 1.40 0.838 0.419
3 0.600 2.50 0.750 1.492 W3
(4)表格中M是M1与小车中砝码质量之和,为小车、拉力传感器及车中砝码的动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功。表中的= J,W3= J(结果均保留三位有效数字)。
(5)该小组组员发现每组数据始终有W<,排除偶然因素造成误差外,最可能出现以上结果的原因是 。
13.为测量铁与某种木材之间的滑动摩擦因数μ,某同学采用如图所示的装置,将用这种木材制成的长木板的一端垫高在用相同木材制成的水平桌面上组成一个斜面,让小铁块(可视为质点)从斜面顶端无初速下滑到水平桌面上继续滑行一段距离停下,不考虑铁块与桌面的碰撞,该同学只用刻度尺测出了斜面的高度h,木板长度L,铁块的水平位移x三个物理量。
(1)以上三个物理量不必要测量的是 (用物理量符号表示);
(2)由于木板长度一定,该同学多次改变h并测出相应的x值,作出x—h图如上,则由图可知铁|块与这种木材的滑动摩擦因数为μ= 。(保留两位有效数字)
评卷人得分
四、解答题
14.有一质量为M、半径为R、密度均匀的球体,在距离球心O为2R的地方有一质量为m的质点.现从M中挖去半径为R的球体,如图所示,则剩余部分对m的万有引力F为多大?
15.如图所示,一质量为的小球自A点由静止释放,沿弧形轨道AB运动进入竖直面内的圆弧形轨道BCD,B点为圆弧形轨道最低点,小球到达圆弧形轨道最高点C时的速度大小为。已知圆弧形轨道BCD的半径,取重力加速度为,B点所在水平面为零势能面,不计一切摩擦和空气阻力。求:
(1)小球到达圆弧形轨道最高点C点时的机械能;
(2)小球释放的位置A距离B点所在平面的竖直高度h。
16.如图所示,在竖直平面内,由倾斜轨道AB、水平轨道BC和半圆形轨道CD连接而成的组合轨道,AB与CD光滑,BC轨道粗糙,动摩擦因数μ=0.1,AB与BC的连接处是半径很小的圆弧,BC与CD相切,圆形轨道CD的半径为R=2m,质量为m=1kg的小物块从倾斜轨道上距水平面高为h=10m处由静止开始下滑,恰好通过圆弧形的最高点D(g取10 m/s2)求:
(1)小物块通过B点时速度的大小;
(2)小物块通过圆形轨道最低点C时圆形轨道对物块的支持力F的大小;
(3)水平轨道BC的长度。
(
…………○…………内…………○…………装…………○…………订…………○…………线…………○…………
) (
※※请※※不※※要※※在※※装※※订※※线※※内※※答※※题※※
) (
…………○…………外…………○…………装…………○…………订…………○…………线…………○…………
)
(
…………○…………内…………○…………装…………○…………订…………○…………线…………○…………
) (
学校:___________姓名:___________班级:___________考号:___________
) (
…………○…………外…………○…………装…………○…………订…………○…………线…………○…………
)
第1页 共4页 ◎ 第2页 共4页
第1页 共4页 ◎ 第2页 共4页
参考答案:
1.D
解析:A.自由落体运动是指物体仅在重力的作用下由静止开始下落的运动,故A错误;
B.自由落体是指初速度为零且只受重力的运动,故B错误;
C.所有物体只在重力作用下运动时,加速度均为g,落地速度与物体的质量无关,故C错误;
D.地球表面的物体在不同纬度处的自由落体加速度不同,在地球赤道处最小,两极处最大。故D正确。
答案:D。
2.C
解析:根据题意,由公式,和可得,人造卫星绕行星运转的轨道半径为
由万有引力提供向心了有
联立可得
答案:C。
3.C
解析:A.由题意可知,小船的速度不变,水流速度随离岸的距离增大而增大,小船在水中运动时,同时参与了一个是匀速直线运动,一个是变速直线运动,由运动的合成规律,可知小船前往河中央的运动轨迹为曲线,A错误;
B.小船前往河中央的最短时间为
B错误;
C.小船返回河岸时,水流速度是零,因此只有小船在静水中的速度,则小船速度为4m/s,C正确;
D.施救后返回河岸的运动中,小船在垂直河岸方向的分运动是匀速直线运动,位移是120m,时间是30s,水流速度随小船向河岸位移成比例的减小,也就是随小船返回时间成比例减小,因此可知,当小船返回到河岸时,小船沿水流方向的位移为
可得施救后小船返回河岸过程的位移大小为
D错误。
答案:C。
4.C
解析:A.跳伞运动员带着张开的降落伞在空气中匀速下落的过程,所受重力与阻力平衡,除重力做功外,阻力对其做负功,因此该过程跳伞运动员的机械能减小,故A错误;
B.电梯加速上升的过程,除重力做功外,钢索对电梯的拉力做正功,因此电梯的机械能增加,故B错误;
C.物体沿光滑的斜面下滑的过程中仅有重力做功,物体的机械能守恒,故C正确;
D.游客在摩天轮中随摩天轮在竖直面内匀速转动的过程,从最低点到最高点,除重力做功外,摩天轮对人的作用力做正功,人的机械能增加;从最高点到最低点的过程中,除重力做功,摩天轮对人的作用力做负功,人的机械能减小,故D错误。
答案:C。
5.B
解析:A.物体下降的高度
这3s内重力做的功为
故A错误;
B.落地时物体速度
落地时重力的功率
故B正确;
C.下落过程中重力的平均功率
故C错误;
D.物体做自由落体运动,只有重力做功,机械能守恒,故D错误。
答案:B。
6.A
解析:AB.因为船速小于水速,所以船不可能到达对岸上游或正对岸,因此最短距离一定大于60m,故A正确,B错误;
CD.过河最短时间是船速垂直河岸的时候所用时间,为
因此最短时间为200s,除此之外,船沿任意方向运动到达对岸所用时间都大于200s,故CD错误。
答案:A。
7.A
解析:A.6个小球都在斜面上运动时,只有重力做功,整个系统机械能守恒,当有部分小球在水平轨道上运动时,斜面上的小球仍在加速,球2对1的作用力做功,故球1的机械能不守恒,故A错误;
B.球6在OA段运动时,斜面上的小球在加速,球5对球6的作用力做正功,动能增加,机械能增大,故B正确;
C.由于有部分小球在水平轨道上运动时,斜面上的小球仍在加速,所以可知离开A点时球6的速度最小,水平射程最小,C正确;
D.最后三个小球在水平面上运动不再加速,3、2、1速度相等,水平射程相同,落地位置相同,D正确。本题选择不正确的。
答案:A。
8.AB
解析:A.根据重力势能的定义可以知道,重力势能是地球和物体共同具有的,故A正确;
B.同一高度,将物体以速度v0向不同的方向抛出,落地时物体下落的高度是相等的,所以物体减少的重力势能一定相等,故B正确;
C.物体的重力势能与所选的零势能面有关,重力势能等于零的物体,高度也可以很高,也可以对别的物体做功;故C错误;
D.物体的重力势能与所选的零势能面有关,当不是取地面为零势能面时,它的重力势能就不等于零,故D错误。
答案:AB。
9.ABC
解析:A.小球A摆下过程,根据动能定理
最低点由牛顿第二定律得
解得
F=3mg
再对B受力分析,受重力.支持力.拉力和静摩擦力,重力的下滑分量为
Fx=4mgsin30°=2mg
所以静摩擦力先减小,当拉力大于2mg后反向变大,故A正确;
B.对整体受力分析,由于A球向左下方拉物体B和斜面体整体,故一定受到地面对其向右的静摩擦力,故B正确;
CD.小球A摆下过程,若B不动,只有重力做功,机械能守恒,故C正确,D错误。
答案:ABC正确。
10.AD
解析:A.根据牛第二定律可知
可得飞船绕地球做匀速圆周运动的速率为
由题意,可得
,
即
故A正确;
BCD.设郑老师的质量为,地球质量为,根据牛第二定律可知
可得地球的质量为
所以由题意,可得
或
可得
显然郑老师的质量由题目已知条件无法求出,故BC错误,D正确。
答案:AD。
11.AD
解析:A.根据牛顿第二定律得
解得工件在传送带上的加速度
根据v=at得,工件放到传送带后相对静止所经历的时间
停止滑动前,工件相对地移动的距离为
工件在传送带上匀速运动的长度
工件在传送带上匀速运动的时间
工件从传送带A位置到B位置需要
故A正确;
B.在正常运行状态下传送带上相邻工件间的距离为
故B错误;
C.在传送带上先是滑动摩擦力做功,然后是静摩擦力做功,则
故C错误;
D.由
知满载时皮带上共有工件11个,其中10个在做匀速直线运动,则
所以传送带满载工件比空载时增加功率
故D正确。
答案:AD。
12. 需要 两光电门间的距离L 0.420 0.746 平衡摩擦力过大
解析:(1)[1]本实验人物传感器的拉力为研究对象的合力,所以需要平衡小车的摩擦力。
(2)[2]根据动能定理知,因要求总功,有
所以必须已知小车位移,故除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L。
(4)[3][4]由
解得
根据表中前两组数据,由功公式
可求出两光电门间距离为
所以有
(5)[5]该小组组员发现每组数据始终有W<ΔEk,排除偶然因素造成误差外,最可能出现以上结果的原因是平衡摩擦力过大了,导致传感器的拉力比合力要小。
13. L 0.50
解析:小铁块从斜面顶端无初速下滑到水平桌面上继续滑行一段距离停下,再这一段对小铁块应用动能定理得: ,和L没有关系,所以不需要测L.根据图象得到斜率为,所以.
点拨:根据动能定理再结合图象即可得出.
14.
解析:质量为M的球体对质点m的万有引力F1==
挖去的球体的质量M′= =
质量为M′的球体对质点m的万有引力F2=
则剩余部分对质点m的万有引力,F=F1-F2=-=
15.(1)8J;(2)0.8m
解析:(1)小球到达圆弧形轨道最高点C点时的机械能
(2)从A到C由机械能守恒定律
解得小球释放的位置A距离B点所在平面的竖直高度
h=0.8m
16.(1)m/s;(2)60N;(3)50m。
解析:(1)物块从A点运动到B点的过程中,由机械能守恒得
解得:
(2)物块恰好通过圆弧形的最高点D时由重力提供向心力,
由牛顿第二定律得:
可得:
物块从C到B过程,由机械能守恒得:
联立解得:
在C点,由牛顿你第二定律得:
解得:
(3)从B到C,由动能定理得:
解得:
点拨:本题考查动能定理及竖直面内的圆周运动,选择合适的过程,并注意竖直面内圆周运动的临界条件即可求解。
答案第1页,共2页
答案第1页,共2页
同课章节目录
- 第1章 功和机械能
- 导入 神奇之能
- 第1节 机械功
- 第2节 功率
- 第3节 动能和动能定理
- 第4节 势能及其改变
- 第5节 科学验证:机械能守恒定律
- 第2章 抛体运动
- 导入 更准、更远
- 第1节 运动的合成与分解
- 第2节 平抛运动
- 第3节 科学探究:平抛运动的特点
- 第4节 生活中的抛体运动
- 第3章 圆周运动
- 导入 生活中的圆周运动
- 第1节 匀速圆周运动快慢的描述
- 第2节 科学探究:向心力
- 第3节 离心现象
- 第4章 万有引力定律及航天
- 导入 从嫦娥奔月到“阿波罗”上天
- 第2节 万有引力定律的应用
- 第3节 人类对太空的不懈探索
- 第5章 科学进步无止境
- 导入 再次跨越时空的对话
- 第1节 初识相对论
- 第2节 相对论中的神奇时空
- 第3节 探索宇宙的奥秘