冀人版(2017秋) 五年级下册6.22 机器模型大比拼(一)(共16张PPT)
文档属性
| 名称 | 冀人版(2017秋) 五年级下册6.22 机器模型大比拼(一)(共16张PPT) |  | |
| 格式 | pptx | ||
| 文件大小 | 3.9MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 冀人版(2017秋) | ||
| 科目 | 科学 | ||
| 更新时间 | 2024-02-11 23:00:17 | ||
图片预览
文档简介
(共16张PPT)
机器模型大比拼(一)
一、什么是机器人
二、人与机器人的关系
目录
CONTENT
机器人概念诞生
一
什么是机器人
1 定义
机器人是一种能够按照预先设计程序而自动执行工作的机械装置。
不同国家定义不同:
基本点还是相同的
①由人设计制造。
②有与人或某些生物相似的智能能力。
2 发展历程
1.工业机器人的历史
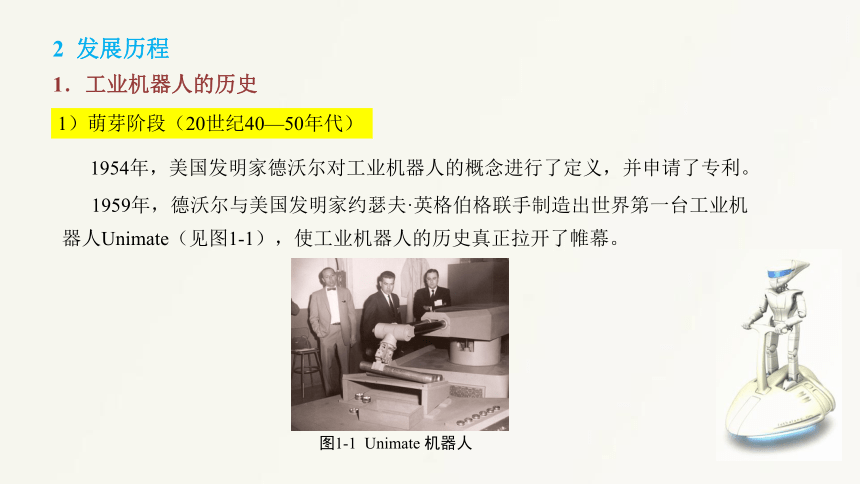
1)萌芽阶段(20世纪40—50年代)
1954年,美国发明家德沃尔对工业机器人的概念进行了定义,并申请了专利。
1959年,德沃尔与美国发明家约瑟夫·英格伯格联手制造出世界第一台工业机器人Unimate(见图1-1),使工业机器人的历史真正拉开了帷幕。
图1-1 Unimate 机器人
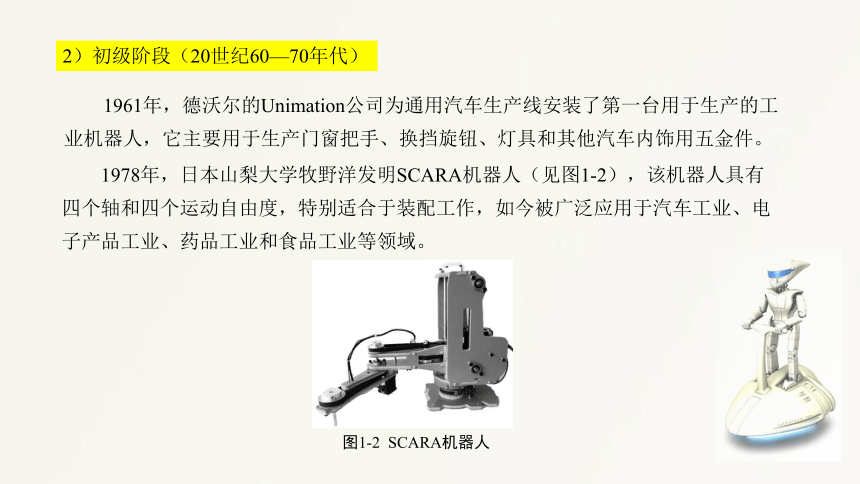
2)初级阶段(20世纪60—70年代)
1961年,德沃尔的Unimation公司为通用汽车生产线安装了第一台用于生产的工业机器人,它主要用于生产门窗把手、换挡旋钮、灯具和其他汽车内饰用五金件。
1978年,日本山梨大学牧野洋发明SCARA机器人(见图1-2),该机器人具有四个轴和四个运动自由度,特别适合于装配工作,如今被广泛应用于汽车工业、电子产品工业、药品工业和食品工业等领域。
图1-2 SCARA机器人
3)迅速发展阶段(20世纪80—90年代)
1981年,通用汽车公司第一次将CONSIGHT机器视觉系统成功地应用在了一个恶劣的制造环境中,利用三台工业机器人以每小时1400个的速度分拣出六种不同的铸件。
1992年,瑞士ABB公司推出开放式控制系统——S4。S4旨在改善对用户至关重要的两个领域——人机界面和机器人的技术性能。
1994年,Motoman公司(即现在的安川电机)推出的机器人控制系统MRC,使同步控制两台机器人成为可能。MRC可以从普通PC编辑工业机器人作业,且具有控制多达21个轴的能力。
4)智能化阶段(21世纪初至今)
2011年,日本发那科公司的R-1000iA机器人利用LVC(学习减振装置)对机器人运动轨迹加以优化,减小了振动,将动作周期缩短约20%,从而实现更高速的动作。
2018年,发那科公司与首选网络公司合作,首次将人工智能应用于其伺服调谐、工业机器人拾取和热位移补偿等功能上。
ABB公司将在上海建设其全球最先进的机器人工厂,该工厂预计将于2020年底投入运营。新的上海工厂将采用大量机器学习、数字化和协作解决方案,使其成为机器人行业中最先进、自动化与柔性化程度最高的工厂,实现用机器人制造机器人。此外,新的研发中心还将帮助加快人工智能领域的发展。
3 组成
机器人一般由机械部分和电子控制部分组成。
4 运动自由度
机器人机构能独立运动的关节的数目。
图1-12 工业机器人机械部分
机器人三定律
1.不得伤害人类。。。
2.绝对服从人类。。。
3.尽力保护自己。。。
二
人与机器人的关系
焊接机器人
焊接机器人是从事焊接作业的工业机器人,可分为点焊机器人和弧焊机器人。
图1-16 焊接机器人
装配机器人
如图1-17所示,装配机器人可以完成生产线上一些零件的装配或拆卸工作,可分为PUMA机器人(可编程通用装配操作手)和SCARA机器人(水平多关节机器人)两种类型。
图1-17 装配机器人
喷涂机器人
喷涂机器人又称喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人,其外形如图1-18所示。
图1-18 喷涂机器人
搬运机器人
搬运作业是指用一种设备握持工件,从一个加工位置移到另一个加工位置。搬运机器人是可以进行自动化搬运作业的工业机器人。
图1-19 搬运机器人
THE END
机器模型大比拼(一)
一、什么是机器人
二、人与机器人的关系
目录
CONTENT
机器人概念诞生
一
什么是机器人
1 定义
机器人是一种能够按照预先设计程序而自动执行工作的机械装置。
不同国家定义不同:
基本点还是相同的
①由人设计制造。
②有与人或某些生物相似的智能能力。
2 发展历程
1.工业机器人的历史
1)萌芽阶段(20世纪40—50年代)
1954年,美国发明家德沃尔对工业机器人的概念进行了定义,并申请了专利。
1959年,德沃尔与美国发明家约瑟夫·英格伯格联手制造出世界第一台工业机器人Unimate(见图1-1),使工业机器人的历史真正拉开了帷幕。
图1-1 Unimate 机器人
2)初级阶段(20世纪60—70年代)
1961年,德沃尔的Unimation公司为通用汽车生产线安装了第一台用于生产的工业机器人,它主要用于生产门窗把手、换挡旋钮、灯具和其他汽车内饰用五金件。
1978年,日本山梨大学牧野洋发明SCARA机器人(见图1-2),该机器人具有四个轴和四个运动自由度,特别适合于装配工作,如今被广泛应用于汽车工业、电子产品工业、药品工业和食品工业等领域。
图1-2 SCARA机器人
3)迅速发展阶段(20世纪80—90年代)
1981年,通用汽车公司第一次将CONSIGHT机器视觉系统成功地应用在了一个恶劣的制造环境中,利用三台工业机器人以每小时1400个的速度分拣出六种不同的铸件。
1992年,瑞士ABB公司推出开放式控制系统——S4。S4旨在改善对用户至关重要的两个领域——人机界面和机器人的技术性能。
1994年,Motoman公司(即现在的安川电机)推出的机器人控制系统MRC,使同步控制两台机器人成为可能。MRC可以从普通PC编辑工业机器人作业,且具有控制多达21个轴的能力。
4)智能化阶段(21世纪初至今)
2011年,日本发那科公司的R-1000iA机器人利用LVC(学习减振装置)对机器人运动轨迹加以优化,减小了振动,将动作周期缩短约20%,从而实现更高速的动作。
2018年,发那科公司与首选网络公司合作,首次将人工智能应用于其伺服调谐、工业机器人拾取和热位移补偿等功能上。
ABB公司将在上海建设其全球最先进的机器人工厂,该工厂预计将于2020年底投入运营。新的上海工厂将采用大量机器学习、数字化和协作解决方案,使其成为机器人行业中最先进、自动化与柔性化程度最高的工厂,实现用机器人制造机器人。此外,新的研发中心还将帮助加快人工智能领域的发展。
3 组成
机器人一般由机械部分和电子控制部分组成。
4 运动自由度
机器人机构能独立运动的关节的数目。
图1-12 工业机器人机械部分
机器人三定律
1.不得伤害人类。。。
2.绝对服从人类。。。
3.尽力保护自己。。。
二
人与机器人的关系
焊接机器人
焊接机器人是从事焊接作业的工业机器人,可分为点焊机器人和弧焊机器人。
图1-16 焊接机器人
装配机器人
如图1-17所示,装配机器人可以完成生产线上一些零件的装配或拆卸工作,可分为PUMA机器人(可编程通用装配操作手)和SCARA机器人(水平多关节机器人)两种类型。
图1-17 装配机器人
喷涂机器人
喷涂机器人又称喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人,其外形如图1-18所示。
图1-18 喷涂机器人
搬运机器人
搬运作业是指用一种设备握持工件,从一个加工位置移到另一个加工位置。搬运机器人是可以进行自动化搬运作业的工业机器人。
图1-19 搬运机器人
THE END
同课章节目录