第六章力和机械第5节探究杠杆的平衡条件第1课时 教学课件 --粤沪版初中物理八年级下
文档属性
| 名称 | 第六章力和机械第5节探究杠杆的平衡条件第1课时 教学课件 --粤沪版初中物理八年级下 |

|
|
| 格式 | pptx | ||
| 文件大小 | 3.4MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 沪粤版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-02-21 00:00:00 | ||
图片预览






文档简介
(共29张PPT)
第 5节 探究杠杆的平衡条件
第1课时 杠杆及其平衡条件
第六章 力和机械
1.知道什么是杠杆,能根据实物画出杠杆的示意图。
2.知道杠杆的平衡条件,会利用杠杆平衡条件解决一些简单的问题。
学 习 目 标
“只要给我一个支点和一根足够长的杠杆,我就能撬动地球。”
——阿基米德
新 课 引 入
新 课 讲 解
一、探究跷跷板中的道理
思考讨论
1.跷跷板为什么能上下转动?
有固定转轴。
2.跷跷板受到哪些力的作用?
左右两侧的压力、转轴的支持力。
3.跷跷板为什么能平衡?跟之前学习的力的平衡一样吗?
转轴对跷跷板向上的支持力与大人和小朋友对跷跷板向下的压力之和相等。
不一样。
4.怎样才能使跷跷板保持水平平衡状态?
大人的压力大,小朋友的压力小,大人离着转轴近,小朋友离着转轴远。
杠杆:物理学中,把能绕某一固定点转动的硬棒(直棒或曲棒),叫做杠杆。
举例
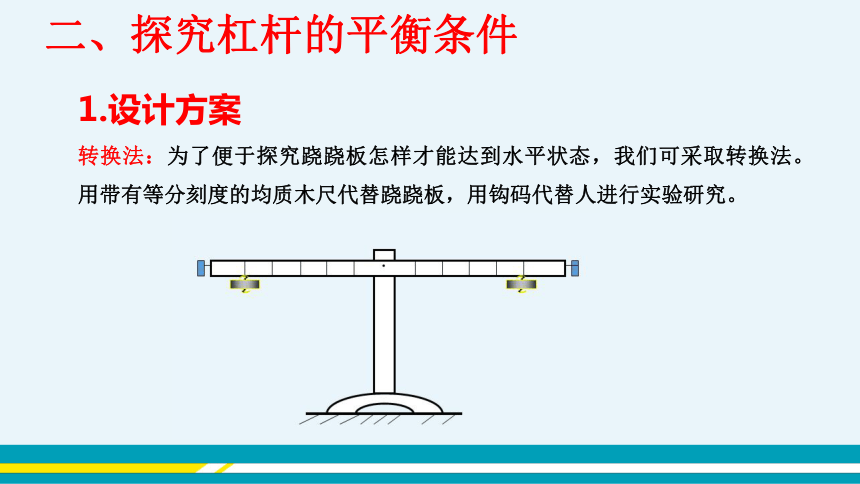
二、探究杠杆的平衡条件
1.设计方案
转换法:为了便于探究跷跷板怎样才能达到水平状态,我们可采取转换法。 用带有等分刻度的均质木尺代替跷跷板,用钩码代替人进行实验研究。
O
L1
L2
F1
F2
思考:F1L1与F2L2之间有什么样的关系呢?
实验序号 左边 右边 拉力F1/N 距离L1/m 拉力F2/N 距离L2/m
2.进行实验与收集证据
实验表格
有关杠杆的几个概念:
支点:杠杆绕着转动的点,用O表示
力臂:从支点到力作用线的距离叫做力臂
动力的力臂叫做动力臂,用L1表示
阻力的力臂叫做阻力臂,用L2表示
杠杆平衡:杠杆在动力和阻力作用下处于静止状态
2 .杠杆是否都是直的?
1. 力臂一定在杠杆上吗?
3.若一个力作用在杠杆上,作用点不变, 作用方向改变,力臂 是否改变?
答:不一定
答:杠杆可以是直的,也可以是弯的
答:要改变
思考讨论
3.分析与论证
杠杆的平衡条件:动力×动力臂=阻力 ×阻力臂
用字母表示为: F1L1=F2L2
结论:杠杆平衡时,杠杆的动力乘动力臂等于阻力乘阻力臂,即杠杆的动力臂是阻力臂的几倍,杠杆的动力F1就是阻力F2的几分之一。
或
典 例 分 析
如课本图6-37中大人重750N,小女孩重250N,当大人离跷跷板的转轴0.5m时,小女孩应该坐在哪里才能使跷跷板水平平衡?
解:根据杠杆的平衡条件,得
答:小女孩应该坐在离转轴1.5 m处。
如图所示,杠杆OA长20cm,AB长60cm,现在A处挂一重200N的物体,要使杠杆水平平衡,且B处的弹簧测力计示数最小,弹簧测力计的方向怎样?弹簧测力计的示数是多少?
分析:根据杠杆的平衡条件可知,要使弹簧测力计的示数最小,力臂应最大,力臂最大为OB,故弹簧测力计的方向应垂直杠杆AB,为使杠杆水平平衡,弹簧测力计方向应竖直向下。
答案:弹簧测力计的方向竖直向下。
根据杠杆的平衡条件:G×OA=F×OB
得
巩固练习
课 堂 小 结
1.杠杆:绕固定点转动的硬棒
2.杠杆的几个重要概念:支点、动力、动力臂、阻力、阻力臂
3.杠杆平衡:杠杆在动力和阻力作用下处于静止状态
4.杠杆的平衡条件:
D
当 堂 检 测
A
D
D
杠杆
40
20
1.5
330
右
力臂的大小
6
不能
变大
3
4
再见
第 5节 探究杠杆的平衡条件
第1课时 杠杆及其平衡条件
第六章 力和机械
1.知道什么是杠杆,能根据实物画出杠杆的示意图。
2.知道杠杆的平衡条件,会利用杠杆平衡条件解决一些简单的问题。
学 习 目 标
“只要给我一个支点和一根足够长的杠杆,我就能撬动地球。”
——阿基米德
新 课 引 入
新 课 讲 解
一、探究跷跷板中的道理
思考讨论
1.跷跷板为什么能上下转动?
有固定转轴。
2.跷跷板受到哪些力的作用?
左右两侧的压力、转轴的支持力。
3.跷跷板为什么能平衡?跟之前学习的力的平衡一样吗?
转轴对跷跷板向上的支持力与大人和小朋友对跷跷板向下的压力之和相等。
不一样。
4.怎样才能使跷跷板保持水平平衡状态?
大人的压力大,小朋友的压力小,大人离着转轴近,小朋友离着转轴远。
杠杆:物理学中,把能绕某一固定点转动的硬棒(直棒或曲棒),叫做杠杆。
举例
二、探究杠杆的平衡条件
1.设计方案
转换法:为了便于探究跷跷板怎样才能达到水平状态,我们可采取转换法。 用带有等分刻度的均质木尺代替跷跷板,用钩码代替人进行实验研究。
O
L1
L2
F1
F2
思考:F1L1与F2L2之间有什么样的关系呢?
实验序号 左边 右边 拉力F1/N 距离L1/m 拉力F2/N 距离L2/m
2.进行实验与收集证据
实验表格
有关杠杆的几个概念:
支点:杠杆绕着转动的点,用O表示
力臂:从支点到力作用线的距离叫做力臂
动力的力臂叫做动力臂,用L1表示
阻力的力臂叫做阻力臂,用L2表示
杠杆平衡:杠杆在动力和阻力作用下处于静止状态
2 .杠杆是否都是直的?
1. 力臂一定在杠杆上吗?
3.若一个力作用在杠杆上,作用点不变, 作用方向改变,力臂 是否改变?
答:不一定
答:杠杆可以是直的,也可以是弯的
答:要改变
思考讨论
3.分析与论证
杠杆的平衡条件:动力×动力臂=阻力 ×阻力臂
用字母表示为: F1L1=F2L2
结论:杠杆平衡时,杠杆的动力乘动力臂等于阻力乘阻力臂,即杠杆的动力臂是阻力臂的几倍,杠杆的动力F1就是阻力F2的几分之一。
或
典 例 分 析
如课本图6-37中大人重750N,小女孩重250N,当大人离跷跷板的转轴0.5m时,小女孩应该坐在哪里才能使跷跷板水平平衡?
解:根据杠杆的平衡条件,得
答:小女孩应该坐在离转轴1.5 m处。
如图所示,杠杆OA长20cm,AB长60cm,现在A处挂一重200N的物体,要使杠杆水平平衡,且B处的弹簧测力计示数最小,弹簧测力计的方向怎样?弹簧测力计的示数是多少?
分析:根据杠杆的平衡条件可知,要使弹簧测力计的示数最小,力臂应最大,力臂最大为OB,故弹簧测力计的方向应垂直杠杆AB,为使杠杆水平平衡,弹簧测力计方向应竖直向下。
答案:弹簧测力计的方向竖直向下。
根据杠杆的平衡条件:G×OA=F×OB
得
巩固练习
课 堂 小 结
1.杠杆:绕固定点转动的硬棒
2.杠杆的几个重要概念:支点、动力、动力臂、阻力、阻力臂
3.杠杆平衡:杠杆在动力和阻力作用下处于静止状态
4.杠杆的平衡条件:
D
当 堂 检 测
A
D
D
杠杆
40
20
1.5
330
右
力臂的大小
6
不能
变大
3
4
再见